- Обзорно-сравнительные радионавигационные системы (корреляционно-экстремальная система)

Содержание
- 2. 1. Принципы построения обзорно-сравнительных систем Обзорно-сравнительные системы (ОСС) предназначены для определения местоположения ЛА по результатам сравнения
- 3. Принцип действия ОСС заключается в следующем: во-первых, заранее должны быть изготовлена эталонная карта местности (ЭКМ); во
- 4. Рис. 2. Обобщенная структурная схема ООС Рис. 1. Отклонение текущего положения от заданного
- 5. Датчик карты местности (ДКМ) вырабатывает сигналы, характеризующие нормативные параметры местности, над которой происходит полет ЛА. Формирователь
- 6. Обычно устройство сравнения карт местности представляет собой коррелятор, который вычисляет ВКФ наблюдаемого (ТКМ) и эталонного (ЭКМ)
- 7. Функции формирователя карты местности, сравнивающего и решающего устройства обычно выполняет ЦВМ ОСС. Системы, в которых информация
- 8. Структурная схема навигационной системы, в которой ОСС служит для коррекции инерциальной системы счисления пути Полученные сигналы
- 9. В зависимости от вида получаемой в системе текущей карты местности различают два основных типа ОСС: системы
- 10. - определяется разрешающей способностью РВ по дальности - зависит от возможного значения бокового отклонения ЛА от
- 11. Рис. 4 Разностный сигнал, несущий информацию о рельефе местности, подается на ЦВМ ОСС, где формируются карты
- 12. Ширина главного пика этих функций зависит от величины дискрета Вывод: Точность системы навигации по рельефу зависит
- 13. 3. Системы навигации по картам местности Системы, в которых в качестве датчиков используются радиолокаторы, относятся к
- 14. Рис. 6 Антенная система, формирующая пять лучей: Теоретически для определения пространственного положения ЛА достаточно трех измерений
- 15. УОМ каждые 25 мс определяется пространственное местоположение ПМ ЛА в результате обработки сигналов в Кор. На
- 17. Скачать презентацию
1. Принципы построения обзорно-сравнительных систем
Обзорно-сравнительные системы (ОСС) предназначены для определения
1. Принципы построения обзорно-сравнительных систем
Обзорно-сравнительные системы (ОСС) предназначены для определения

Принцип действия ОСС заключается в следующем:
во-первых, заранее должны быть изготовлена эталонная
Принцип действия ОСС заключается в следующем:
во-первых, заранее должны быть изготовлена эталонная
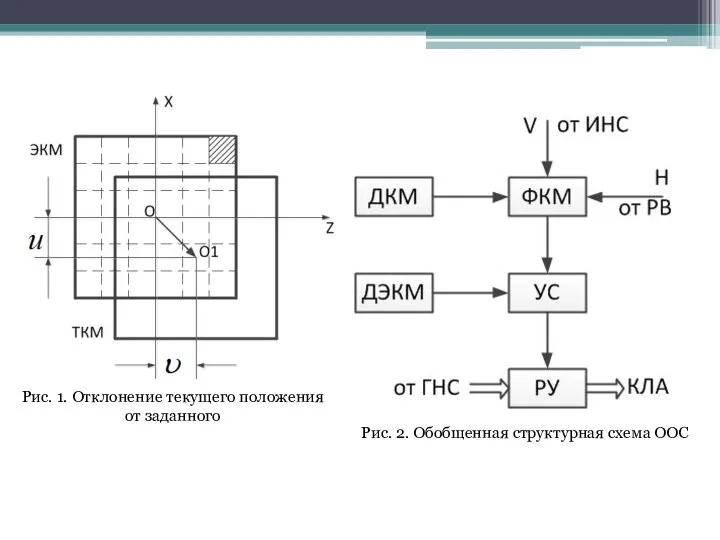
Рис. 2. Обобщенная структурная схема ООС
Рис. 1. Отклонение текущего положения от
Рис. 1. Отклонение текущего положения от
Датчик карты местности (ДКМ) вырабатывает сигналы, характеризующие нормативные параметры местности,
Датчик карты местности (ДКМ) вырабатывает сигналы, характеризующие нормативные параметры местности,

Обычно устройство сравнения карт местности представляет собой коррелятор, который вычисляет
Обычно устройство сравнения карт местности представляет собой коррелятор, который вычисляет
Функции формирователя карты местности, сравнивающего и решающего устройства обычно выполняет
Функции формирователя карты местности, сравнивающего и решающего устройства обычно выполняет
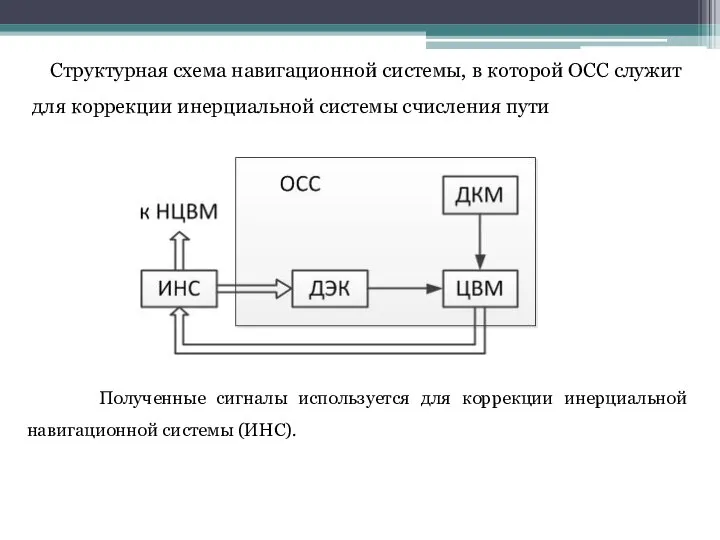
Структурная схема навигационной системы, в которой ОСС служит для коррекции
Структурная схема навигационной системы, в которой ОСС служит для коррекции
В зависимости от вида получаемой в системе текущей карты местности
В зависимости от вида получаемой в системе текущей карты местности
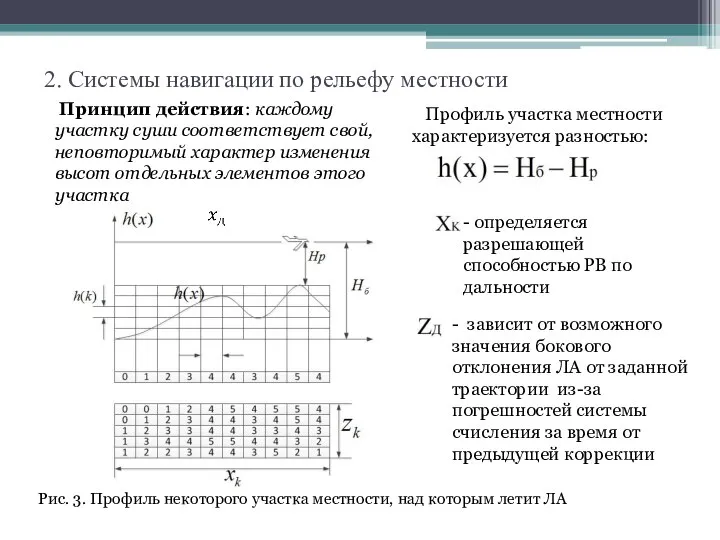
- определяется разрешающей способностью РВ по дальности
- зависит от возможного значения
- определяется разрешающей способностью РВ по дальности
- зависит от возможного значения
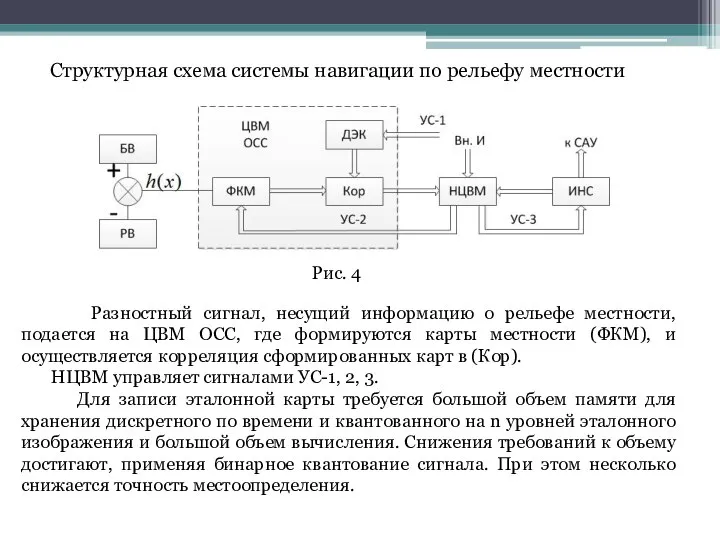
Рис. 4
Разностный сигнал, несущий информацию о рельефе местности, подается на
Рис. 4
Разностный сигнал, несущий информацию о рельефе местности, подается на
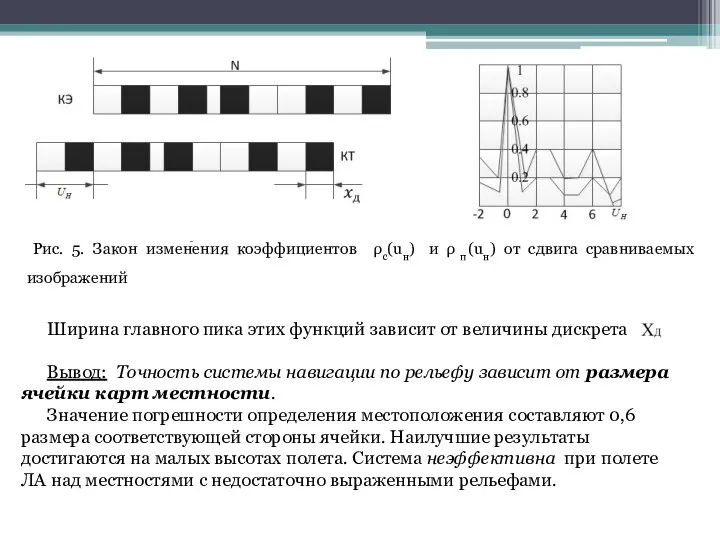
Ширина главного пика этих функций зависит от величины дискрета
Вывод:
Вывод:
3. Системы навигации по картам местности
Системы, в которых в качестве
3. Системы навигации по картам местности
Системы, в которых в качестве
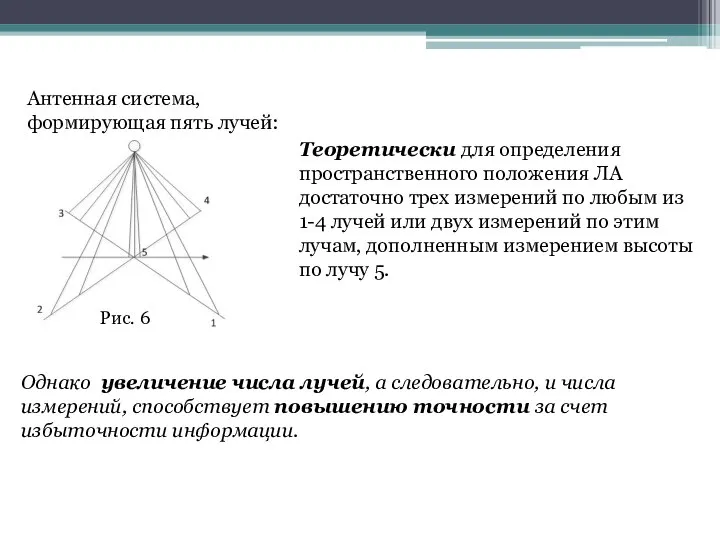
Рис. 6
Антенная система, формирующая пять лучей:
Теоретически для определения пространственного положения ЛА
Рис. 6
Антенная система, формирующая пять лучей:
Теоретически для определения пространственного положения ЛА
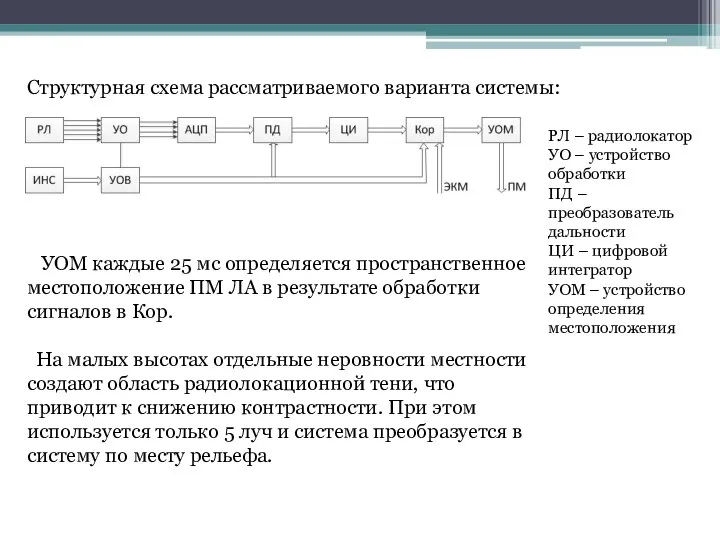
УОМ каждые 25 мс определяется пространственное местоположение ПМ ЛА в
УОМ каждые 25 мс определяется пространственное местоположение ПМ ЛА в
 ГЕОЛОГИЧЕСКИЕ ОСНОВЫ ПРОГНОЗИРОВАНИЯ МЕСТОРОЖДЕНИЙ ПОЛЕЗНЫХ ИСКОПАЕМЫХ
ГЕОЛОГИЧЕСКИЕ ОСНОВЫ ПРОГНОЗИРОВАНИЯ МЕСТОРОЖДЕНИЙ ПОЛЕЗНЫХ ИСКОПАЕМЫХ Медуза Горгона
Медуза Горгона Мастер-класс по изготовлению русской матрёшки
Мастер-класс по изготовлению русской матрёшки Транзистор- это основа электронного устройства
Транзистор- это основа электронного устройства МЕЖПРЕДМЕТНАЯ ИНТЕГРАЦИЯ В ШКОЛЬНОМ КУРСЕ ДИСЦИПЛИН ЕСТЕСТВЕННОГО ЦИКЛА НА ПРИМЕРЕ ПРЕПОДАВАНИЯ БИОЛОГИИ В ШКОЛЕ Аитова Фарид
МЕЖПРЕДМЕТНАЯ ИНТЕГРАЦИЯ В ШКОЛЬНОМ КУРСЕ ДИСЦИПЛИН ЕСТЕСТВЕННОГО ЦИКЛА НА ПРИМЕРЕ ПРЕПОДАВАНИЯ БИОЛОГИИ В ШКОЛЕ Аитова Фарид Олимпийское движение в Японии: история и современность
Олимпийское движение в Японии: история и современность Поверхность и контактные явления. Диод Шоттки
Поверхность и контактные явления. Диод Шоттки Давайте познакомимся!
Давайте познакомимся! Warehouse coverage area
Warehouse coverage area Зимний стих - презентация для начальной школы
Зимний стих - презентация для начальной школы Проект “Телемост” Россия и США
Проект “Телемост” Россия и США ГОРНЫЙ ХРУСТАЛЬ
ГОРНЫЙ ХРУСТАЛЬ Отличительные черты выборов в демократическом обществе
Отличительные черты выборов в демократическом обществе Мост над Бездной: Сандро Ботичелли
Мост над Бездной: Сандро Ботичелли Прекрасный человек античности
Прекрасный человек античности Reliģiski filozofiskās domas attīstība Ķīnas kultūrā
Reliģiski filozofiskās domas attīstība Ķīnas kultūrā Умножение и деление на 10 и 100 - презентация для начальной школы_
Умножение и деление на 10 и 100 - презентация для начальной школы_ Equivalence in translation: some problem-solving strategies
Equivalence in translation: some problem-solving strategies Презентация
Презентация Диагностика и ремонт тормозной системы легкового автомобиля
Диагностика и ремонт тормозной системы легкового автомобиля Космические
Космические  Предприятие в условиях рынка
Предприятие в условиях рынка Способы преобразования комплексного чертежа
Способы преобразования комплексного чертежа Теория межкультурной коммуникации, как наука
Теория межкультурной коммуникации, как наука Лихачев Дмитрий Сергеевич Выдающийся советский и российский филолог, искусствовед, сценарист, академик РАН (до 1991 —
Лихачев Дмитрий Сергеевич Выдающийся советский и российский филолог, искусствовед, сценарист, академик РАН (до 1991 — Презентация Право собственности
Презентация Право собственности изменение сроков уплаты в соответствии с налоговым зак-м Терешкова М. Лазарюк А. ДС5 ФТД5
изменение сроков уплаты в соответствии с налоговым зак-м Терешкова М. Лазарюк А. ДС5 ФТД5 Записи
Записи