- Описание и преобразование управляющих процессов. Сети Петри и их модификация

Содержание
- 2. Основная задача начального этапа проектирования УА – выбор формализованного языка. Основные понятия – базис сетей Петри:
- 3. Пример: A = {a0, a1, a2, a3, a4} T = {t0, t1, t2, t3, t4} I(t0)
- 4. f-вектор маркировки сети Петри. N = (A, T, I, O, M0), где M0 – вектор начальной
- 5. Безопасная сеть Петри. запрещено наличие кратных дуг между позициями и переходами; вектор маркировки может содержать лишь
- 6. Тайм-аутные сети Петри. 0 q (q+a) (q+b) Помеченные сети Петри. метка – цвет 1 позиция –
- 7. Управляющие процессы и их формализованное описание.
- 8. Простейший линейный последовательный процесс – оригинальная сеть Петри. Ai – процедуры (i = 0 – k)
- 9. Если выполнение процедуры – неделимое событие, то: фрагмент с tHi, tKi, ∆i и zi, ai,ωi –
- 10. Пример: Если для Ai – {Cвi}=C1, {Cзi}=C3, C4 и {Cоi}=C1, C4, то Ai({C1}, {C3, C4}, {C1,
- 13. Скачать презентацию
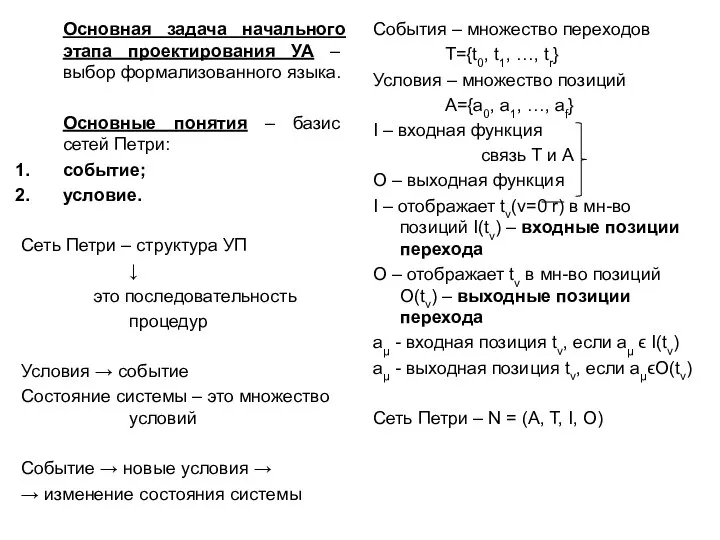
Основная задача начального этапа проектирования УА – выбор формализованного языка.
Основные понятия
Основная задача начального этапа проектирования УА – выбор формализованного языка.
Основные понятия
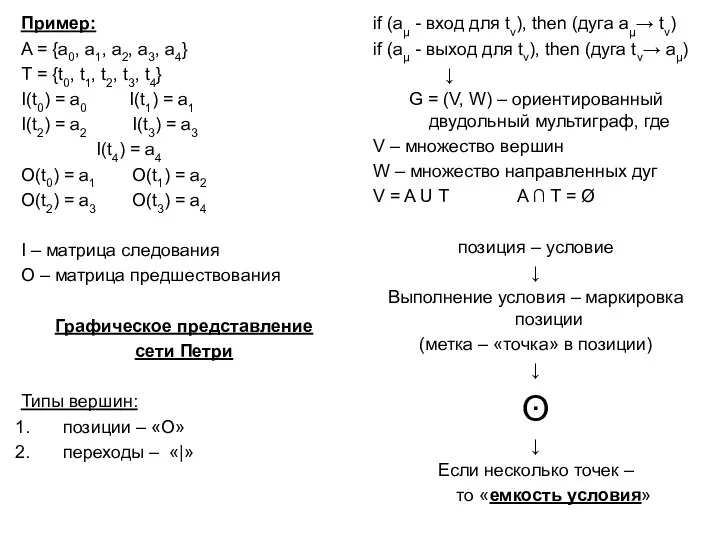
Пример:
A = {a0, a1, a2, a3, a4}
T = {t0, t1, t2,
Пример:
A = {a0, a1, a2, a3, a4}
T = {t0, t1, t2,
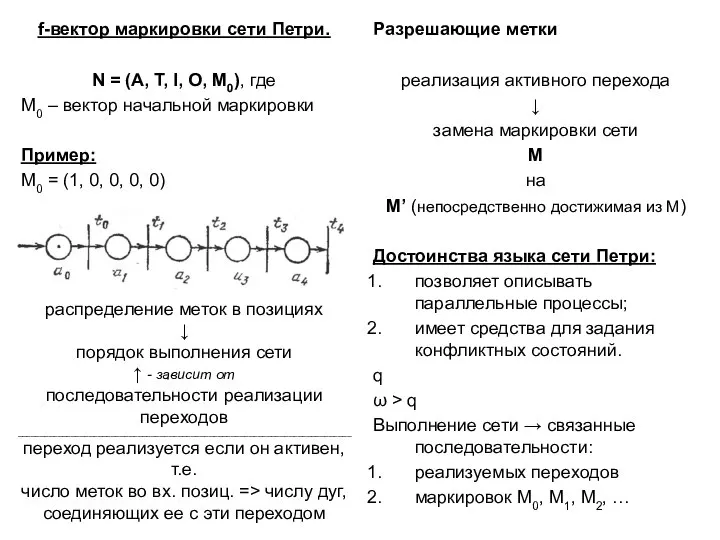
f-вектор маркировки сети Петри.
N = (A, T, I, O, M0), где
M0
f-вектор маркировки сети Петри.
N = (A, T, I, O, M0), где
M0
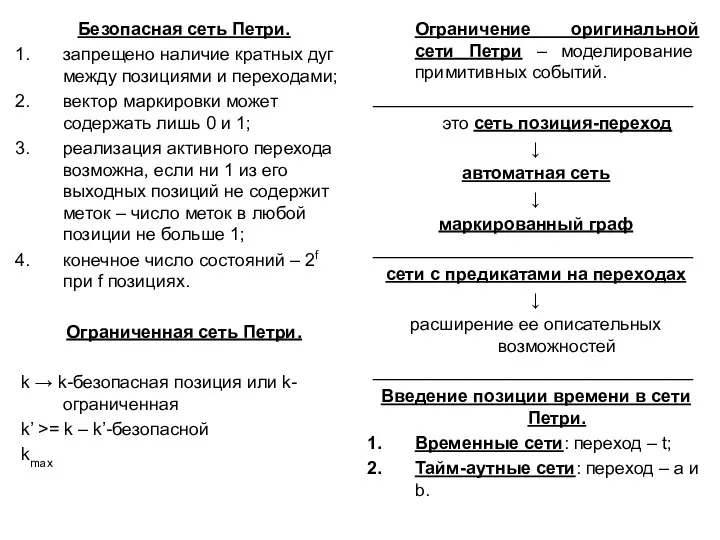
Безопасная сеть Петри.
запрещено наличие кратных дуг между позициями и переходами;
вектор маркировки
Безопасная сеть Петри.
запрещено наличие кратных дуг между позициями и переходами;
вектор маркировки
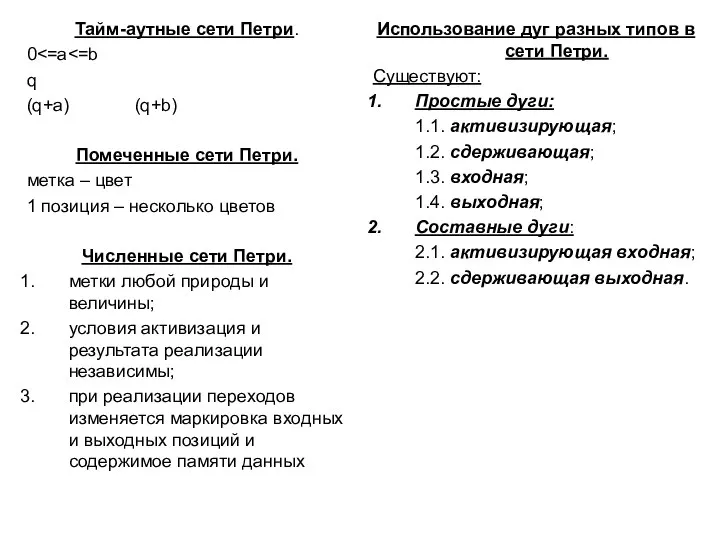
Тайм-аутные сети Петри.
0<=a<=b
q
(q+a) (q+b)
Помеченные сети Петри.
метка – цвет
1 позиция – несколько цветов
Численные
Тайм-аутные сети Петри.
0<=a<=b
q
(q+a) (q+b)
Помеченные сети Петри.
метка – цвет
1 позиция – несколько цветов
Численные
Управляющие процессы и их формализованное описание.
Управляющие процессы и их формализованное описание.
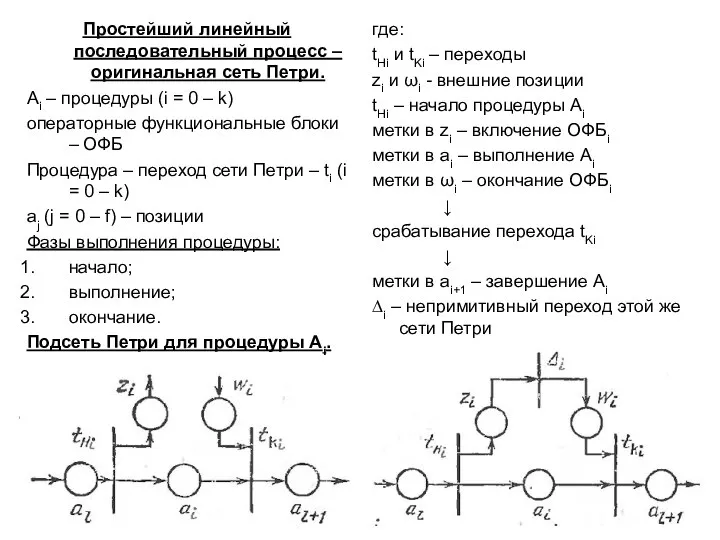
Простейший линейный последовательный процесс – оригинальная сеть Петри.
Ai – процедуры (i
Простейший линейный последовательный процесс – оригинальная сеть Петри.
Ai – процедуры (i
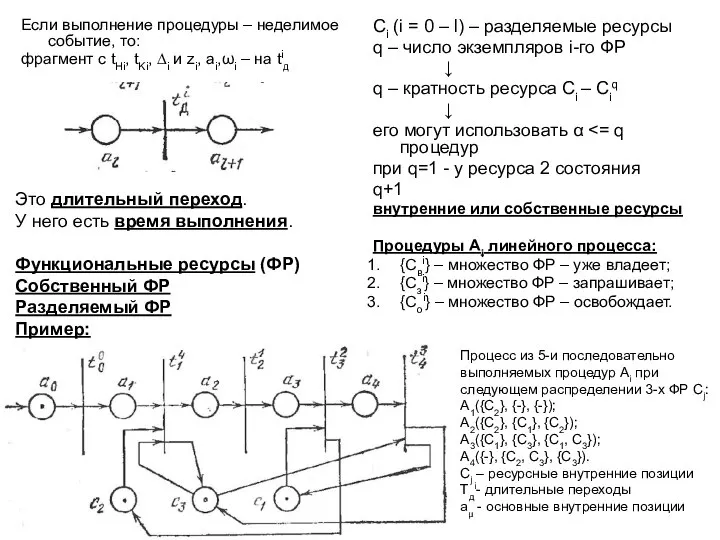
Если выполнение процедуры – неделимое событие, то:
фрагмент с tHi, tKi, ∆i
Если выполнение процедуры – неделимое событие, то:
фрагмент с tHi, tKi, ∆i
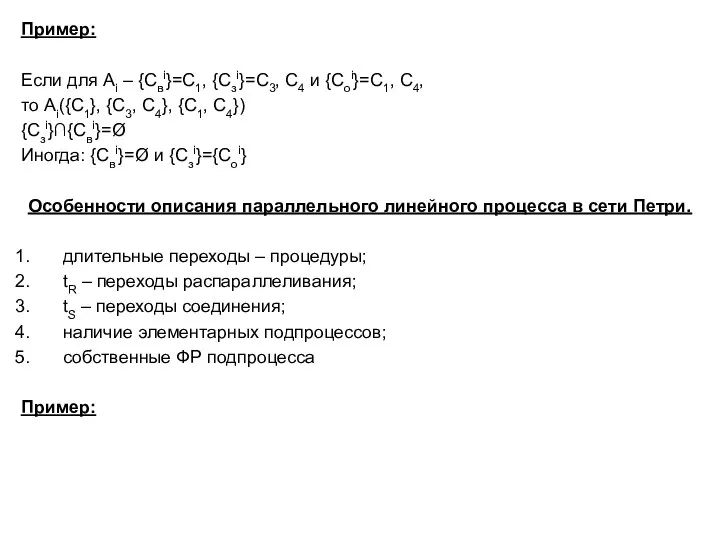
Пример:
Если для Ai – {Cвi}=C1, {Cзi}=C3, C4 и {Cоi}=C1, C4,
то Ai({C1},
Пример:
Если для Ai – {Cвi}=C1, {Cзi}=C3, C4 и {Cоi}=C1, C4,
то Ai({C1},

 Требование безопасности во время занятий лёгкой атлетикой на уроках физкультуры
Требование безопасности во время занятий лёгкой атлетикой на уроках физкультуры Валы и оси
Валы и оси Правовые основы воспитания в ВС РФ
Правовые основы воспитания в ВС РФ Сборочные чертежи
Сборочные чертежи Основы ассемблера
Основы ассемблера  Этика современного менеджмента Подготовила: учащаяся группы Э-239 Грук Алина
Этика современного менеджмента Подготовила: учащаяся группы Э-239 Грук Алина Презентация на тему "Авторитет родителей Проявление агрессии у детей" - скачать презентации по Педагогике
Презентация на тему "Авторитет родителей Проявление агрессии у детей" - скачать презентации по Педагогике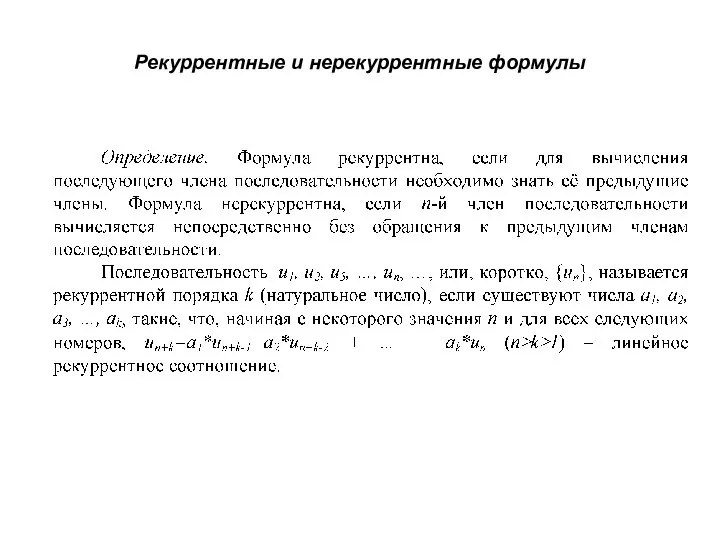 Рекуррентные и нерекуррентные формулы
Рекуррентные и нерекуррентные формулы ВКР: Реконструкция трансформаторной подстанции
ВКР: Реконструкция трансформаторной подстанции ОБЗОР ПРАВИЛА
ОБЗОР ПРАВИЛА Кратные интегралы
Кратные интегралы Вербальные и невербальные средства общения
Вербальные и невербальные средства общения Основы законодательства, регламентирующего обращения граждан в органы государственной власти и местного самоуправления
Основы законодательства, регламентирующего обращения граждан в органы государственной власти и местного самоуправления ПЕРИНАТОЛОГИЯ КАК НАУКА
ПЕРИНАТОЛОГИЯ КАК НАУКА Нервная система
Нервная система  Европейский костюм эпохи Возрождения XV-XVI века
Европейский костюм эпохи Возрождения XV-XVI века Индия и Китай в древности
Индия и Китай в древности Анализ творчества управления баскетбольной командой в ходе игры ведущими тренерами
Анализ творчества управления баскетбольной командой в ходе игры ведущими тренерами Массивы. Одномерные массивы
Массивы. Одномерные массивы Это яркая, бунтарская драма с захватывающим сюжетом и неординарными музыкальными номерами повествует о жизни Ваньки-Каина, бывшег
Это яркая, бунтарская драма с захватывающим сюжетом и неординарными музыкальными номерами повествует о жизни Ваньки-Каина, бывшег Презентация Виды жилых помещений специализированного жилищного фонда и их предоставление
Презентация Виды жилых помещений специализированного жилищного фонда и их предоставление Функционирование сайта образовательного учреждения в новых условиях
Функционирование сайта образовательного учреждения в новых условиях Загребельна Т.Д.
Загребельна Т.Д.  My idol this is Sergio Ramos
My idol this is Sergio Ramos г. Мышкин
г. Мышкин Современное состояние индустрии туризма
Современное состояние индустрии туризма  Презентация Ежемесячное пособие по уходу за ребенком
Презентация Ежемесячное пособие по уходу за ребенком  Основные стадии уголовного процесса
Основные стадии уголовного процесса