- Основы автоматики и САУ

Содержание
- 2. Технологические процессы (ТП) - целенаправленное преобразования вещества, энергии и информации для получения требуемого продукта или результата.
- 3. Автоматикой называется отрасль науки и техники, охватывающая совокупность методов и технических средств автоматического управления всеми операциями
- 4. Системы автоматического управления (САУ) – это системы, в которых информация о ходе технологического процесса используется для
- 5. В системах автоматического управления (САУ) все операции управления выполняются автоматическими устройствами и поэтому САУ могут работать
- 6. Наука о методах и средствах автоматического управления техническими объектами управления называется технической кибернетикой. Методической основой технической
- 7. Анализ САУ заключается в определении и количественной оценке свойств САУ с заданной структурой и известными параметрами
- 9. Классификация САУ Разнообразие САУ по назначению, принципам построения, принципам действия, характеристикам, способам получения и передачи информации
- 10. Классификация САУ 1) По виду уравнений, описывающих процессы управления: а) класс линейных систем управления; б) класс
- 11. Классификация САУ Каждый класс систем управления делится на подклассы: а) системы с постоянными параметрами (описываются уравнениями
- 12. Классификация САУ 2) По характеру передачи сигналов управления различают: а) непрерывные (аналоговые) системы управления; б) дискретные
- 13. Классификация САУ 3) По характеру процессов в системе управления различают: а) детерминированные системы (имеют определенные параметры
- 14. Классификация САУ 4) По характеру функционирования САУ делятся на четыре типа: а) обыкновенные САУ (имеют полную
- 16. ОСНОВЫ ТЕОРИИ ЛИНЕЙНЫХ НЕПРЕРЫВНЫХ САУ Математические модели САУ Для математического описания САУ по её функциональной схеме
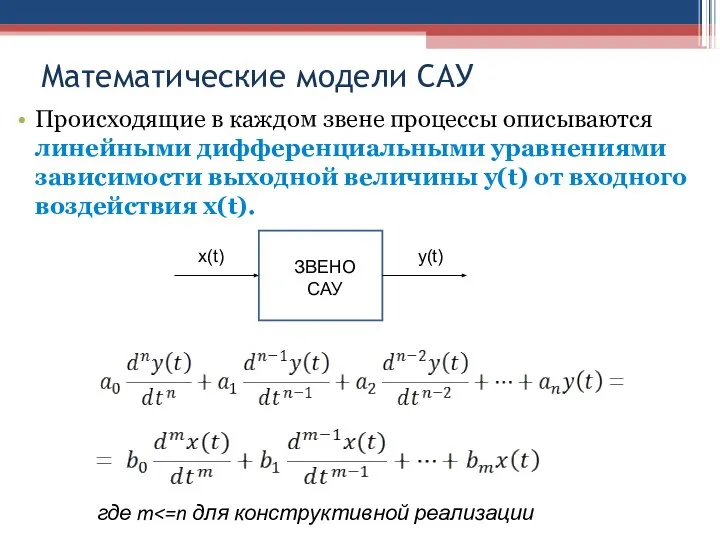
- 17. Математические модели САУ Происходящие в каждом звене процессы описываются линейными дифференциальными уравнениями зависимости выходной величины у(t)
- 18. Математические модели САУ Эти уравнения называются математическими моделями звеньев и для звеньев разной физической природы составляются
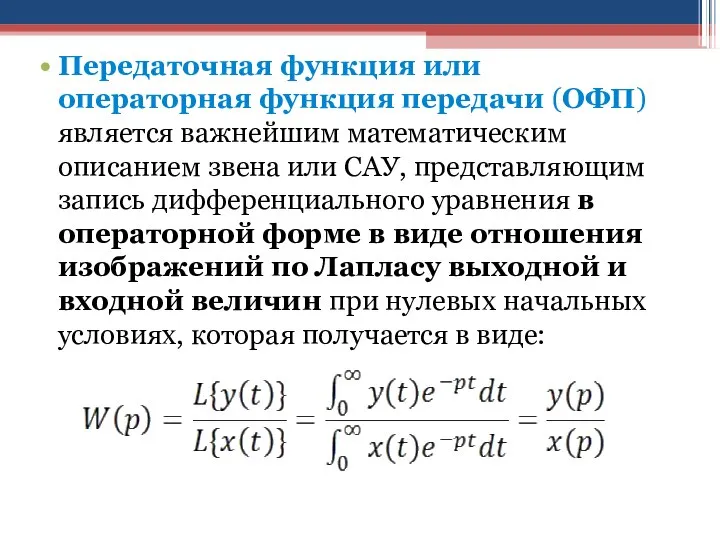
- 19. Передаточная функция или операторная функция передачи (ОФП) является важнейшим математическим описанием звена или САУ, представляющим запись
- 20. Операторная функция передачи (ОФП) Переводим дифференциальное уравнение в операторную форму, заменой: и далее и далее
- 21. Операторная функция передачи (ОФП) Получаем из дифференциального уравнения: Уравнение в операторной форме после замены:
- 22. Операторная функция передачи (ОФП) Вынесем y(p) и x(p) за скобки: Запишем ОФП:
- 23. Типовые звенья САУ и их характеристики Звенья с математическим описанием обыкновенными дифференциальными уравнениями первого и второго
- 24. Типовые звенья САУ и их характеристики Классификацию типовых звеньев удобно осуществить, рассматривая различные частные случаи общего
- 25. Типовые звенья САУ и их характеристики Вынесем x(p) и y(p) за скобки: Передаточная функция в общем
- 26. Типовые звенья САУ и их характеристики Принято уравнение: записывать в виде (разделив на ): где Параметры
- 27. Типовые звенья САУ и их характеристики Передаточная функция из уравнения: в общем виде для типовых звеньев
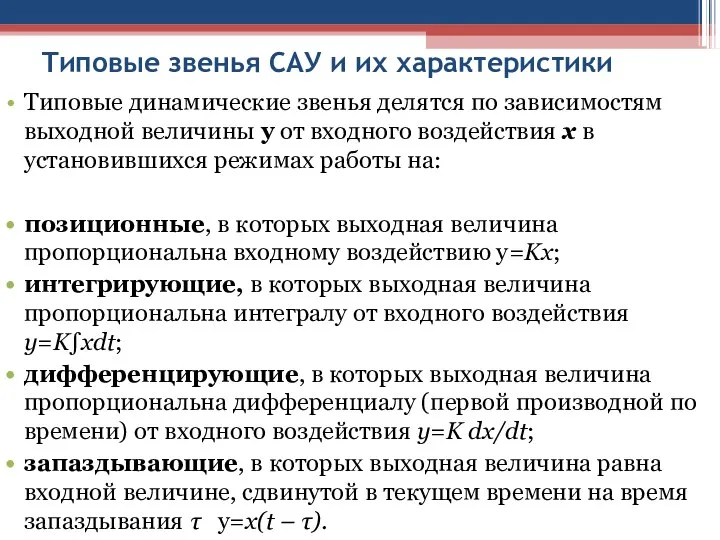
- 28. Типовые звенья САУ и их характеристики Типовые динамические звенья делятся по зависимостям выходной величины y от
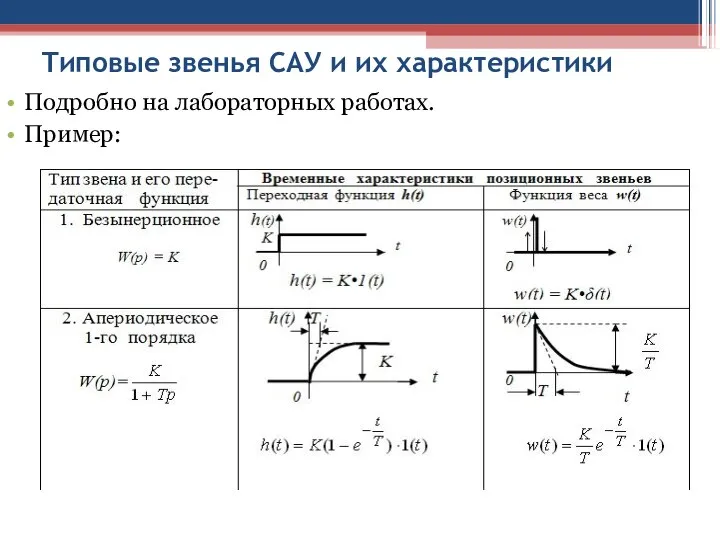
- 29. Типовые звенья САУ и их характеристики Подробно на лабораторных работах. Пример:
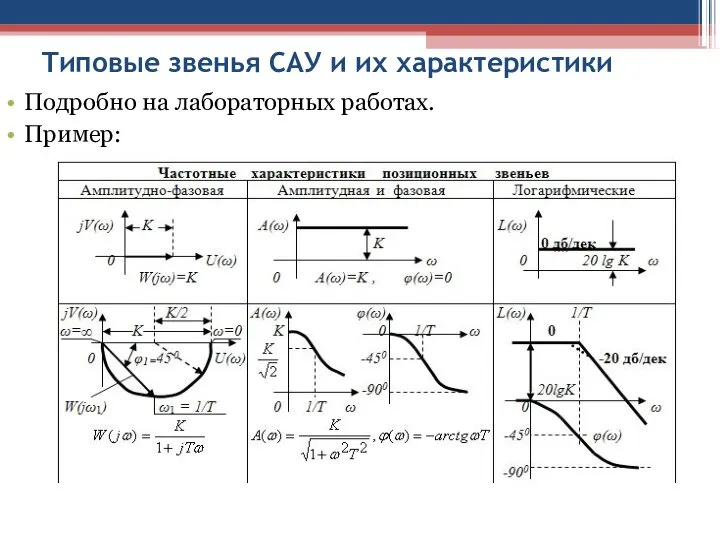
- 30. Типовые звенья САУ и их характеристики Подробно на лабораторных работах. Пример:
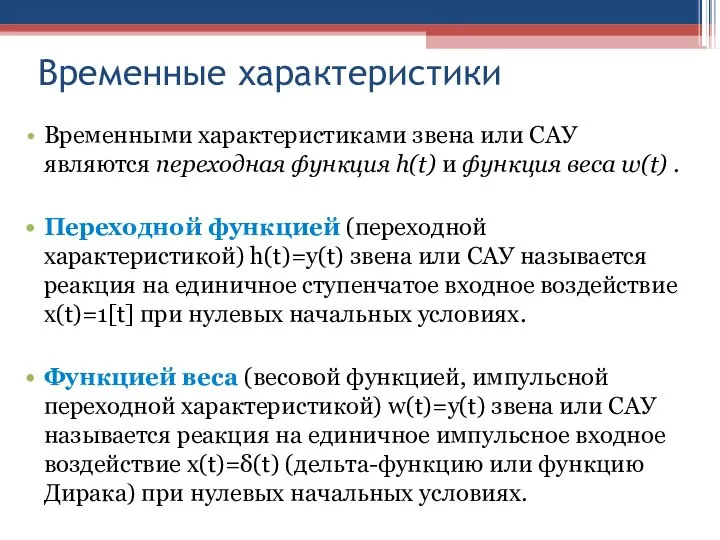
- 31. Временные характеристики Временными характеристиками звена или САУ являются переходная функция h(t) и функция веса w(t) .
- 32. Временные характеристики Дельта-функция или функция Дирака получается при дифференцировании единичной ступенчатой функции δ(t)=d1[t]/dt, при этом δ(t)=0
- 33. Временные характеристики Например, для САУ с : Переходная характеристика: Импульсная характеристика: x(t) x(t) h(t)=y(t) w(t)=y(t)
- 34. Временные характеристики Например, для САУ с : Переходная характеристика: Импульсная характеристика: x(t) h(t)=y(t) x(t) w(t)=y(t)
- 35. Временные характеристики Например, для САУ с : Переходная характеристика: Импульсная характеристика: x(t) w(t)=y(t) x(t) h(t)=y(t)
- 36. Временные характеристики Например, для САУ с : Переходная характеристика Ступенчатое входное воздействие: Импульсная характеристика Дельта-функция:
- 37. Временные характеристики Например, для САУ с : Линейное входное воздействие: Параболическое входное воздействие:
- 38. Временные характеристики Например, для САУ с : Синусоидальное входное воздействие:
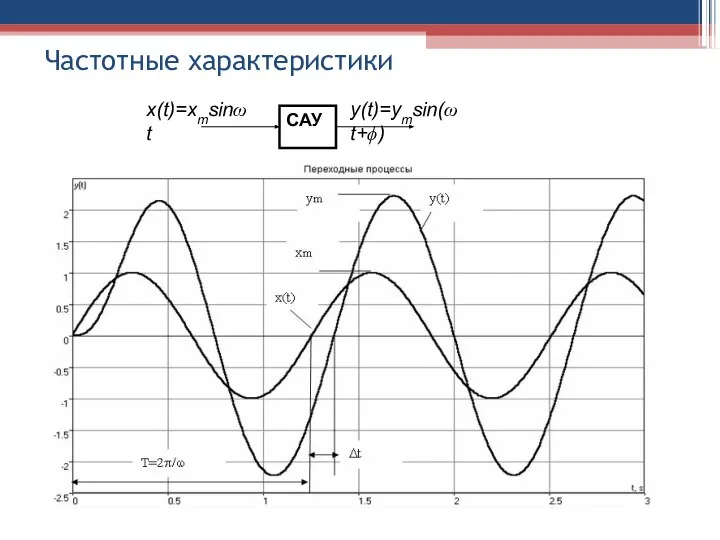
- 39. Частотные характеристики Частотные характеристики представляют собой зависимость амплитуды и фазы выходного сигнала звена или системы в
- 40. Частотные характеристики Если на вход САУ в момент времени t=0 приложено гармоническое воздействие x(t) определенной частоты
- 41. Частотные характеристики
- 42. Частотные характеристики Изменяя частоту ω от 0 до ∝ при постоянном значении xm, можно установить, что
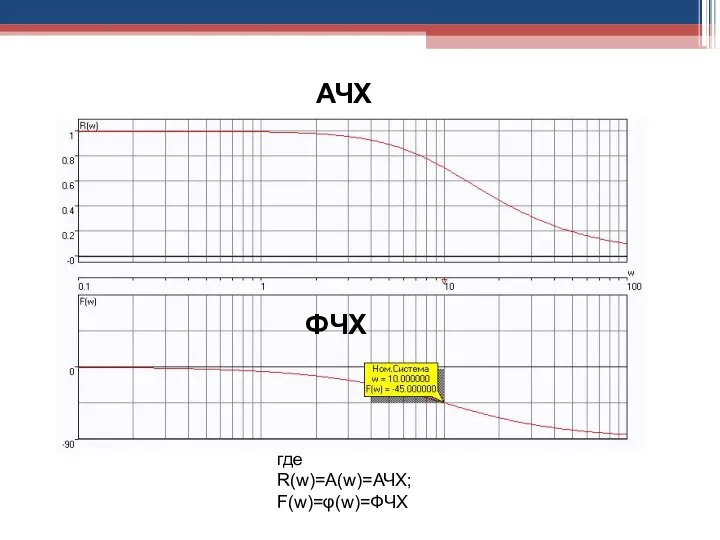
- 43. Частотные характеристики Зависимость отношения амплитуд выходного и входного сигнала от частоты называют амплитудной частотной характеристикой (АЧХ)
- 44. Частотные характеристики Зависимость фазового сдвига между входным и выходным сигналами от частоты называют фазовой частотной характеристикой
- 45. Частотные характеристики
- 46. Частотные характеристики
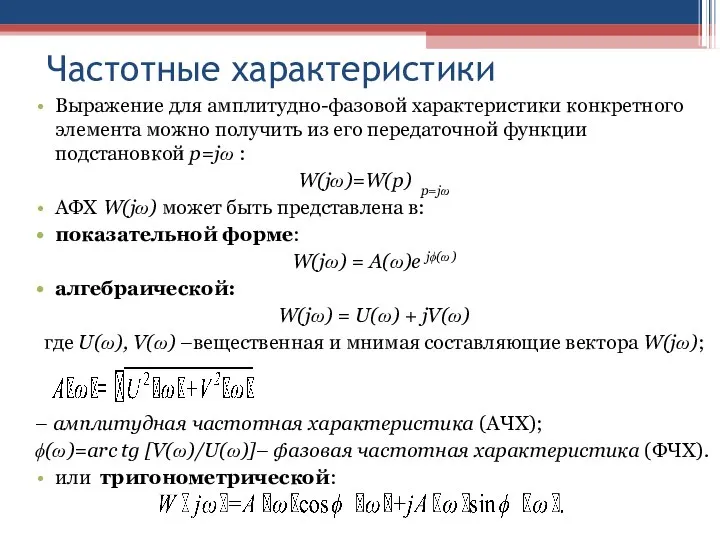
- 47. Частотные характеристики При объединении амплитудной и фазовой частотных характеристик в одну получают амплитудно-фазовую частотную характеристику (АФЧХ
- 48. Частотные характеристики Амплитудно-фазовая частотная характеристика W(jω) является функцией комплексного переменного jω. Модуль АФХ равен А(ω), а
- 49. Частотные характеристики АФХ АЧХ ФЧХ
- 50. Частотные характеристики АФХ
- 51. Частотные характеристики Выражение для амплитудно-фазовой характеристики конкретного элемента можно получить из его передаточной функции подстановкой p=jω
- 52. Далее пример просто показать. Не под запись.
- 53. Частотные характеристики Рассмотрим пример. Пусть передаточная функция имеет вид: Проведем замену: Получаем:
- 54. Частотные характеристики
- 55. Получаем АФХ
- 56. Получаем АЧХ и ФЧХ
- 57. Частотные характеристики В расчетах САУ широко используются логарифмические частотные характеристики. Логарифмическая амплитудная частотная характеристика (ЛАЧХ) звена
- 58. Частотные характеристики Децибел равен 1/10 бела. Бел равен десятичному логарифму отношения мощностей на выходе и входе
- 59. Частотные характеристики Логарифмическая фазовая частотная характеристика (ЛФЧХ) φ(ω)=arctg[V(ω)/U(ω)] звена или САУ строится по оси ординат в
- 60. Частотные характеристики ω=1 Гц L(ω)=20lg(3.5)= 10,88дБ
- 61. АЧХ и ФЧХ
- 62. ЛАЧХ и ЛФЧХ
- 63. АЧХ и ФЧХ
- 64. ЛАЧХ и ЛФЧХ
- 65. САУ представляется её функциональной, алгоритмической и конструктивной структурами (структурными схемами).
- 66. Функциональная структура САУ определяет состав функциональных блоков, выполняющих определённые функции: получение текущей информации (датчики), формирование управляющего
- 67. Например, функциональная структура САУ:
- 68. Алгоритмическая структура САУ представляет собой математическую модель САУ, состоящую из однонаправленных звеньев и связей звеньев друг
- 69. Например, алгоритмическая структура САУ:
- 70. Конструктивная структура САУ определяет состав её конструктивных элементов и связей их друг с другом и с
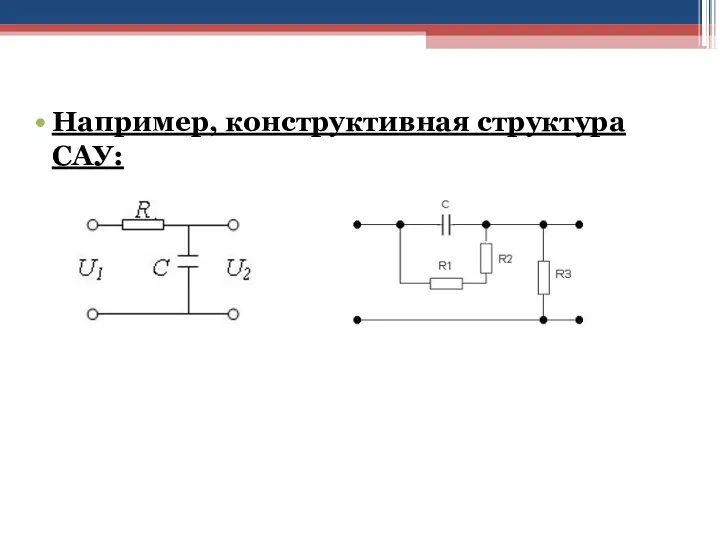
- 71. Например, конструктивная структура САУ:
- 72. Ниже пример того, как составляются дифференциальные уравнения.
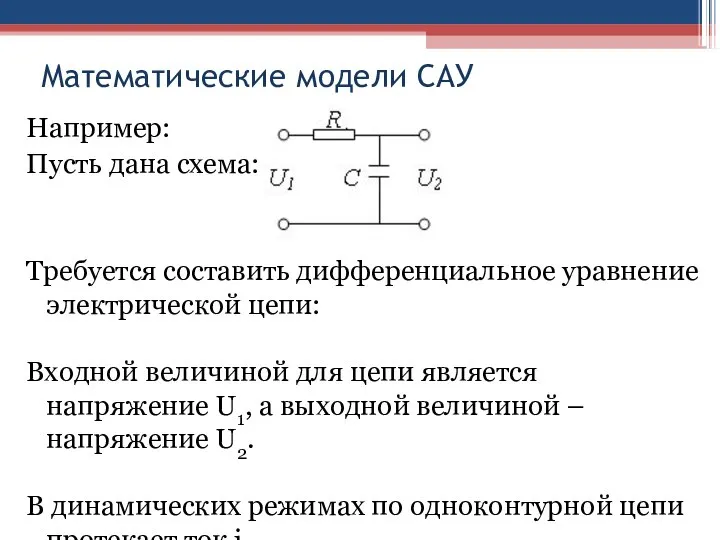
- 73. Математические модели САУ Например: Пусть дана схема: Требуется составить дифференциальное уравнение электрической цепи: Входной величиной для
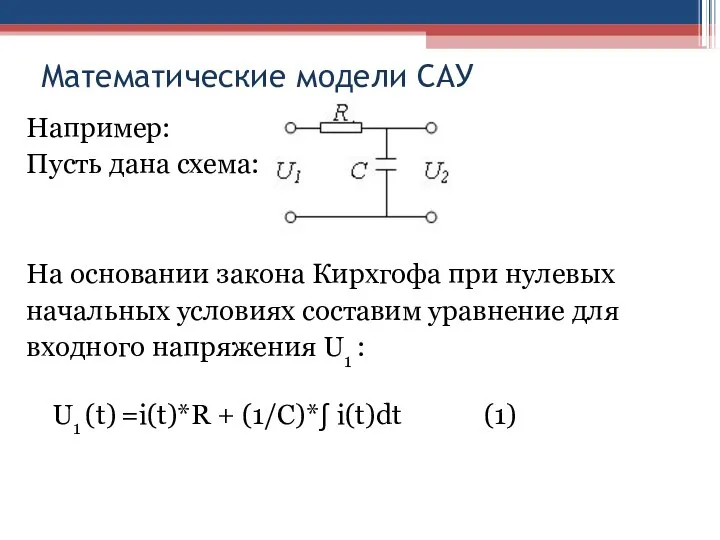
- 74. Математические модели САУ Например: Пусть дана схема: На основании закона Кирхгофа при нулевых начальных условиях составим
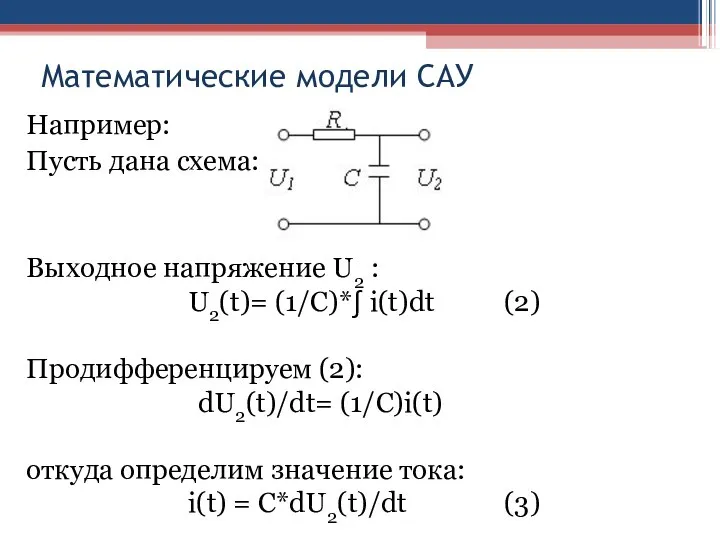
- 75. Математические модели САУ Например: Пусть дана схема: Выходное напряжение U2 : U2(t)= (1/C)*∫ i(t)dt (2) Продифференцируем
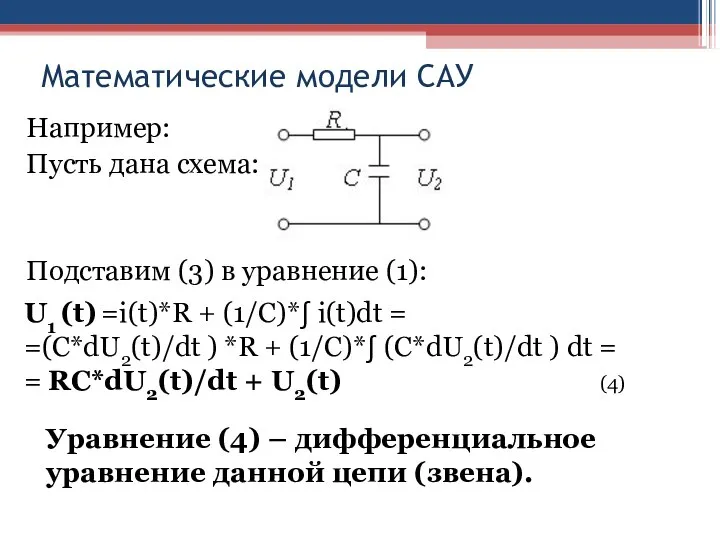
- 76. Математические модели САУ Например: Пусть дана схема: Подставим (3) в уравнение (1): Уравнение (4) – дифференциальное
- 77. Ниже пример того, как составляются ОФП.
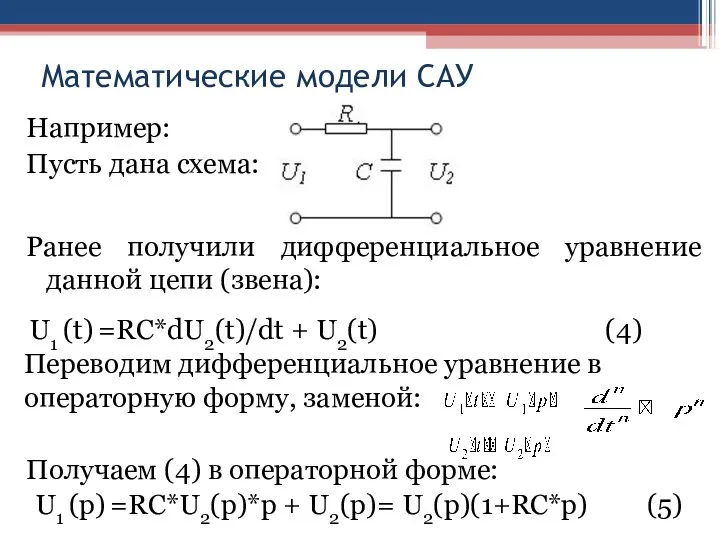
- 78. Математические модели САУ Например: Пусть дана схема: Ранее получили дифференциальное уравнение данной цепи (звена): Получаем (4)
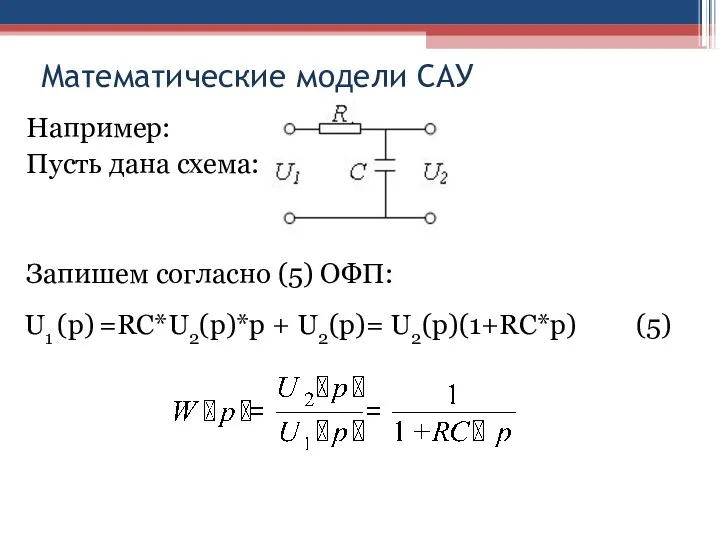
- 79. Математические модели САУ Например: Пусть дана схема: Запишем согласно (5) ОФП: U1 (p) =RC*U2(p)*p + U2(p)=
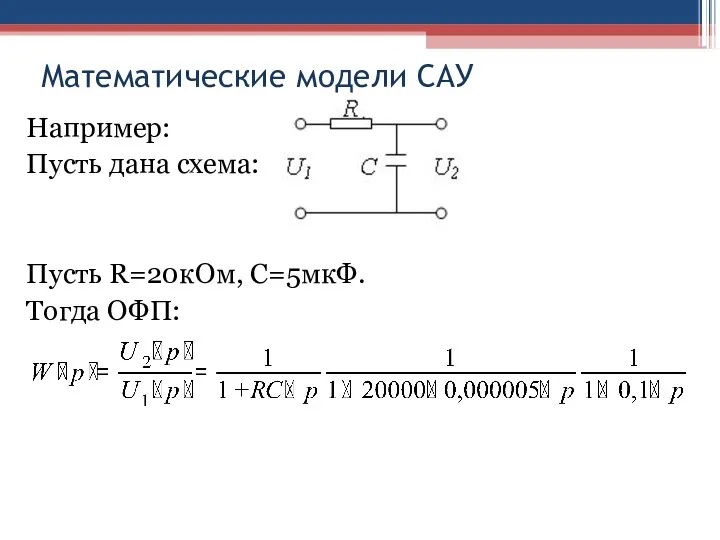
- 80. Математические модели САУ Например: Пусть дана схема: Пусть R=20кОм, С=5мкФ. Тогда ОФП:
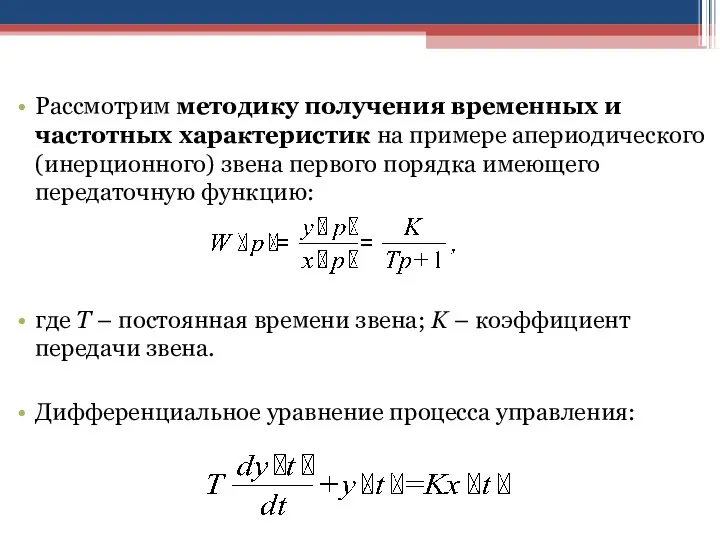
- 81. Рассмотрим методику получения временных и частотных характеристик на примере апериодического (инерционного) звена первого порядка имеющего передаточную
- 82. Например: Пусть дана схема: Дифференциальное уравнение процесса управления :
- 83. Переходная функция звена h(t)=y(t)=U2(t) получается в виде суммы общего и частного решений дифференциального уравнения при нулевых
- 84. Частное решение получается из дифференциального уравнения при в виде: Общее решение записывается в виде: где С
- 85. Найдем корень характеристического уравнения: Где характеристическое уравнение: Приравняем D(p)=0 и выразим p = -10 Получаем: Постоянную
- 86. Получим: Выполнив дифференцирование произведения функций С и получим:
- 87. При подстановке нулевых начальных условиях при t=0 и U2(t)=0 получаем из Проинтегрируем полученное выражение и получим
- 88. В результате переходная функция имеет вид: Построим таблицу значений и график:
- 89. Типовые звенья САУ и их характеристики Весовая функция определяется дифференцированием h(t) по времени:
- 90. Весовая функция имеет вид: Построим таблицу значений и график:
- 91. Частотная амплитудно-фазовая характеристика (АФХ) из уравнения ОФП: при p=jω:
- 92. Амплитудная А(ω) и фазовая φ(ω) частотные характеристики (АЧХ и ФЧХ) определяются из: и имеют вид:
- 93. Логарифмическая амплитудная частотная характеристика (ЛАЧХ) описывается выражением:
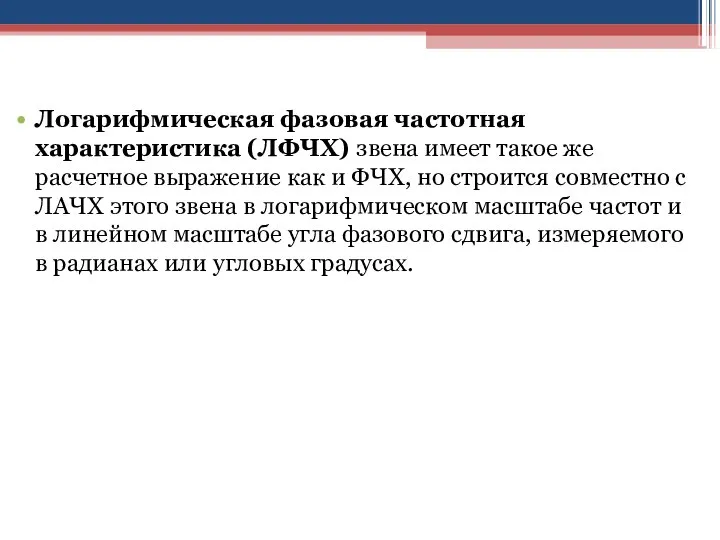
- 94. Логарифмическая фазовая частотная характеристика (ЛФЧХ) звена имеет такое же расчетное выражение как и ФЧХ, но строится
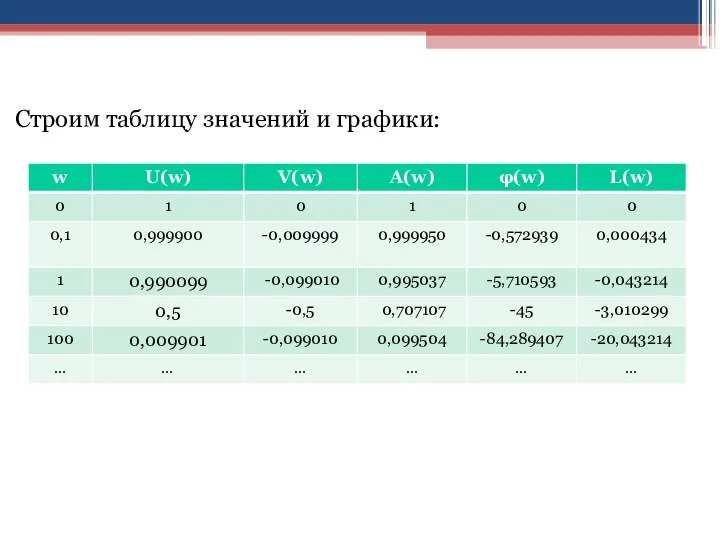
- 95. Строим таблицу значений и графики:
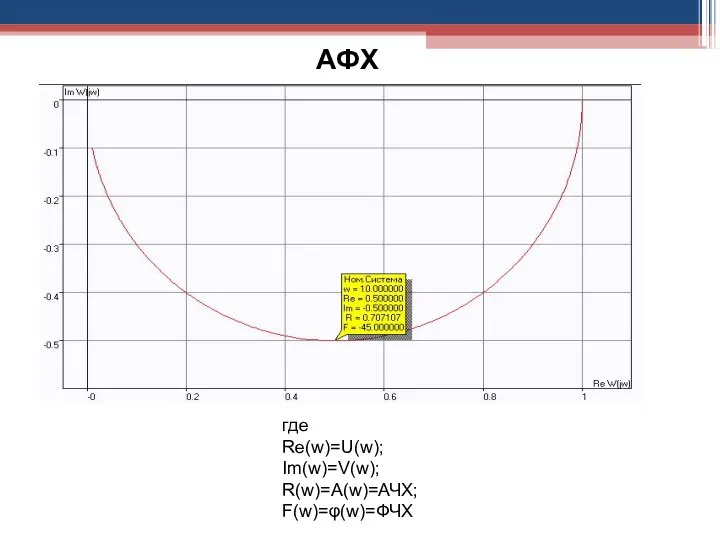
- 96. где Re(w)=U(w); Im(w)=V(w); R(w)=A(w)=АЧХ; F(w)=φ(w)=ФЧХ АФХ
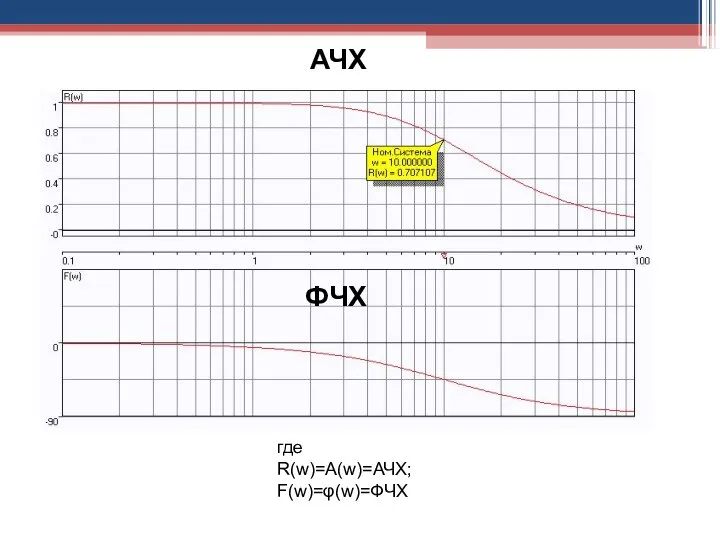
- 97. где R(w)=A(w)=АЧХ; F(w)=φ(w)=ФЧХ АЧХ ФЧХ
- 98. где R(w)=A(w)=АЧХ; F(w)=φ(w)=ФЧХ АЧХ ФЧХ
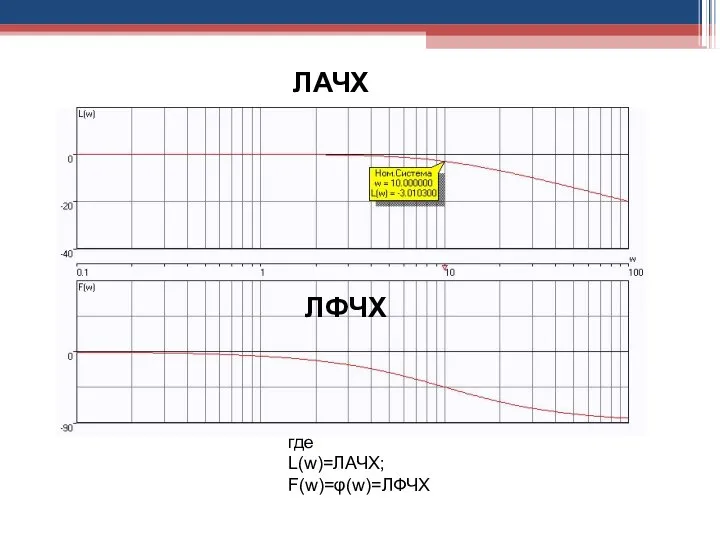
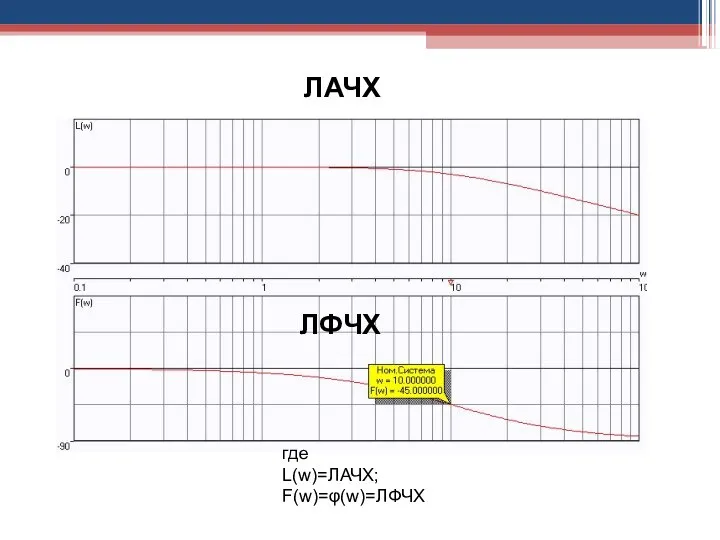
- 99. где L(w)=ЛАЧХ; F(w)=φ(w)=ЛФЧХ ЛАЧХ ЛФЧХ
- 100. где L(w)=ЛАЧХ; F(w)=φ(w)=ЛФЧХ ЛАЧХ ЛФЧХ
- 101. Для описания модели САУ обычно используется три способа: 1) поэлементное описание САУ с учётом взаимодействия каждого
- 102. Для описания модели САУ обычно используется три способа: 2) системное описание САУ представляется одним уравнением, которое
- 103. Для описания модели САУ обычно используется три способа: 3) векторно-матричное описание САУ в пространстве переменных состояния
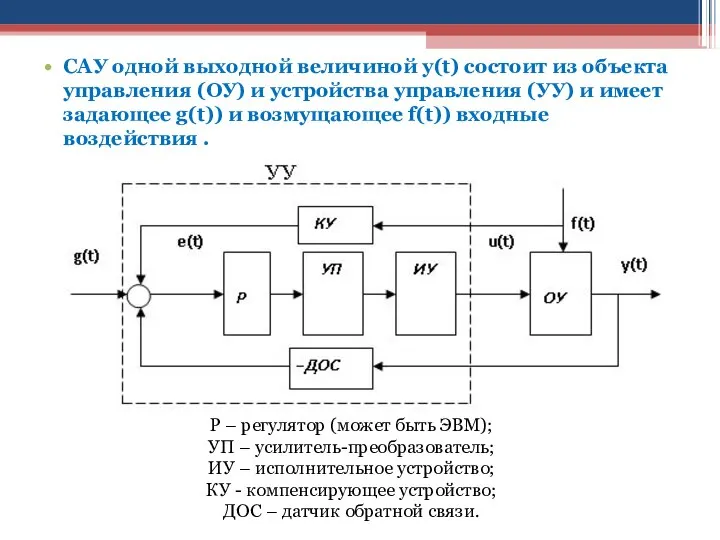
- 104. САУ одной выходной величиной y(t) состоит из объекта управления (ОУ) и устройства управления (УУ) и имеет
- 105. Устройство управления (УУ) выполняет целенаправленные операции управления технологическим процессом (ТП), формируя управляющее воздействие u(t) на ОУ
- 106. Объект управления (ОУ) в САУ выполняет рабочие операции осуществления ТП. Для этого выходной величиной y(t) ОУ
- 107. В устройстве управления (УУ) алгоритм управления формируется в регуляторе (Р), который обычно реализуется с использованием операционных
- 108. УУ могут строиться по трем основным принципам управления: 1) принцип разомкнутого управления u(t)=K∙g(t) позволяет строить устойчивые
- 109. УУ могут строиться по трем основным принципам управления: 2) принцип компенсации возмущающего воздействия f(t) (управление по
- 110. УУ могут строиться по трем основным принципам управления: 3) принцип обратной связи (принцип отклонения, управление по
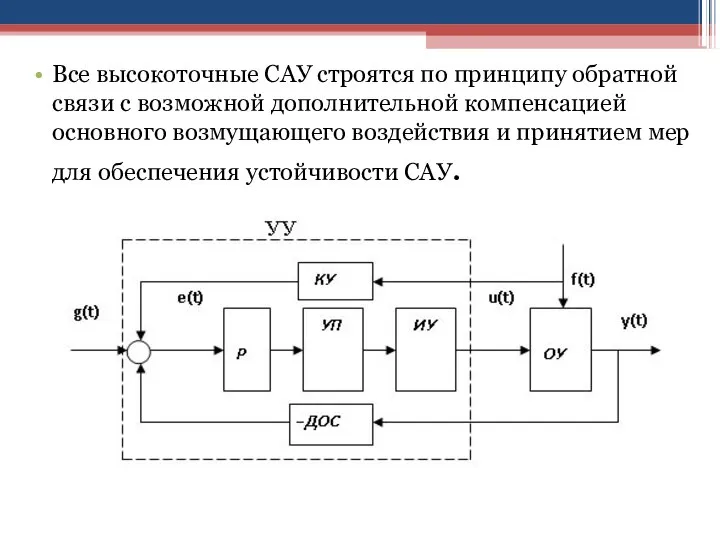
- 111. Все высокоточные САУ строятся по принципу обратной связи с возможной дополнительной компенсацией основного возмущающего воздействия и
- 112. В УУ часто используются линейные алгоритмы управления: - пропорциональный u(t)=K∙e(t), - интегральный u(t)=K∫e(t)dt, - пропорционально–интегральный u(t)=K[e(t)+∫e(t)dt],
- 114. Скачать презентацию
Технологические процессы (ТП) - целенаправленное преобразования вещества, энергии и информации для
Технологические процессы (ТП) - целенаправленное преобразования вещества, энергии и информации для
Автоматикой называется отрасль науки и техники, охватывающая совокупность методов и технических
Автоматикой называется отрасль науки и техники, охватывающая совокупность методов и технических

Системы автоматического управления (САУ) – это системы, в которых информация о
Системы автоматического управления (САУ) – это системы, в которых информация о
В системах автоматического управления (САУ) все операции управления выполняются автоматическими устройствами
Наука о методах и средствах автоматического управления техническими объектами управления называется
Наука о методах и средствах автоматического управления техническими объектами управления называется
Анализ САУ заключается в определении и количественной оценке свойств САУ с
Анализ САУ заключается в определении и количественной оценке свойств САУ с
Классификация САУ
Разнообразие САУ по назначению, принципам построения, принципам действия, характеристикам, способам
Классификация САУ
Разнообразие САУ по назначению, принципам построения, принципам действия, характеристикам, способам
Классификация САУ
1) По виду уравнений, описывающих процессы управления:
а) класс линейных систем
Классификация САУ
1) По виду уравнений, описывающих процессы управления:
а) класс линейных систем
Классификация САУ
Каждый класс систем управления делится на подклассы:
а) системы с постоянными
Классификация САУ
Каждый класс систем управления делится на подклассы:
а) системы с постоянными
Классификация САУ
2) По характеру передачи сигналов управления различают:
а) непрерывные (аналоговые) системы
Классификация САУ
2) По характеру передачи сигналов управления различают:
а) непрерывные (аналоговые) системы

Классификация САУ
3) По характеру процессов в системе управления различают:
а) детерминированные системы
Классификация САУ
3) По характеру процессов в системе управления различают:
а) детерминированные системы
Классификация САУ
4) По характеру функционирования САУ делятся на четыре типа:
а) обыкновенные
Классификация САУ
4) По характеру функционирования САУ делятся на четыре типа:
а) обыкновенные
ОСНОВЫ ТЕОРИИ ЛИНЕЙНЫХ НЕПРЕРЫВНЫХ САУ
Математические модели САУ
Для математического описания САУ по
ОСНОВЫ ТЕОРИИ ЛИНЕЙНЫХ НЕПРЕРЫВНЫХ САУ
Математические модели САУ
Для математического описания САУ по
Математические модели САУ
Происходящие в каждом звене процессы описываются линейными дифференциальными уравнениями
Математические модели САУ
Происходящие в каждом звене процессы описываются линейными дифференциальными уравнениями
Математические модели САУ
Эти уравнения называются математическими моделями звеньев и для звеньев
Математические модели САУ
Эти уравнения называются математическими моделями звеньев и для звеньев
Передаточная функция или операторная функция передачи (ОФП) является важнейшим математическим описанием
Передаточная функция или операторная функция передачи (ОФП) является важнейшим математическим описанием
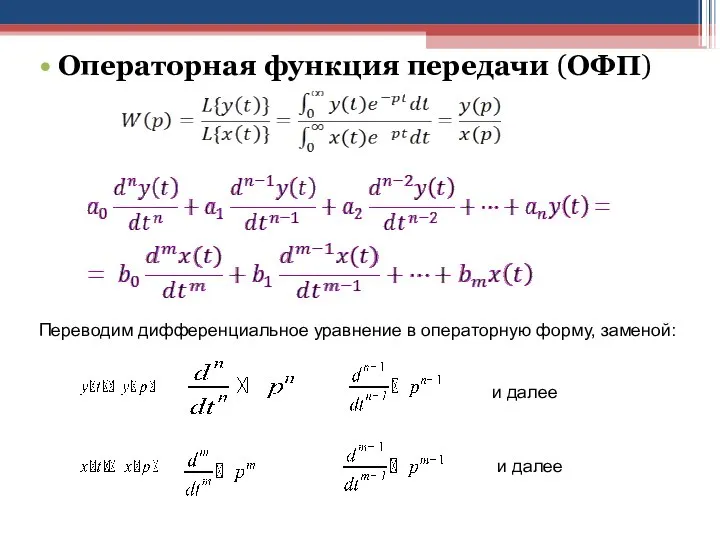
Операторная функция передачи (ОФП)
Переводим дифференциальное уравнение в операторную форму, заменой:
и
Операторная функция передачи (ОФП)
Переводим дифференциальное уравнение в операторную форму, заменой:
и
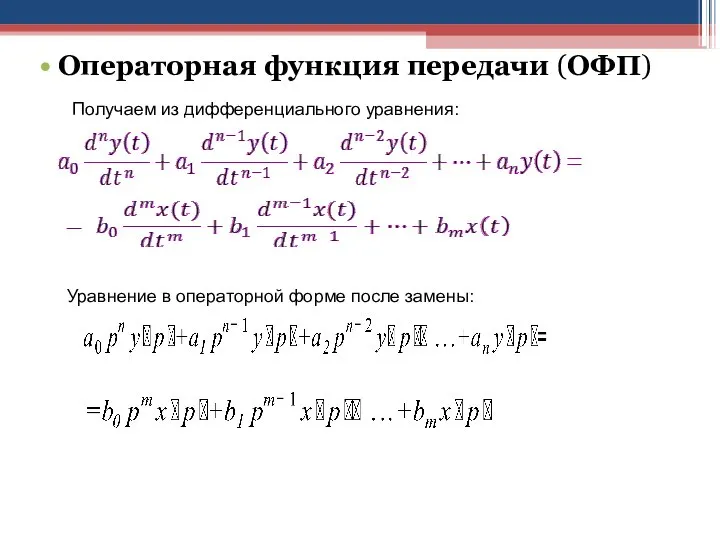
Операторная функция передачи (ОФП)
Получаем из дифференциального уравнения:
Уравнение в операторной форме
Операторная функция передачи (ОФП)
Получаем из дифференциального уравнения:
Уравнение в операторной форме
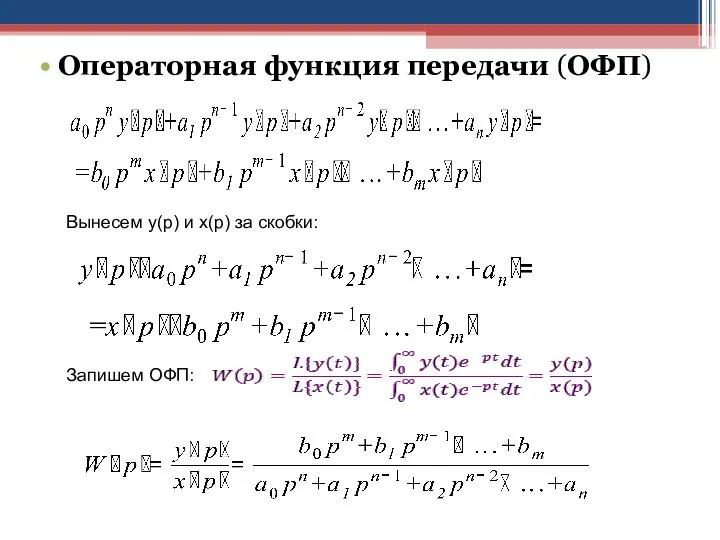
Операторная функция передачи (ОФП)
Вынесем y(p) и x(p) за скобки:
Запишем ОФП:
Операторная функция передачи (ОФП)
Вынесем y(p) и x(p) за скобки:
Запишем ОФП:
Типовые звенья САУ и их характеристики
Звенья с математическим описанием обыкновенными дифференциальными
Типовые звенья САУ и их характеристики
Звенья с математическим описанием обыкновенными дифференциальными
Типовые звенья САУ и их характеристики
Классификацию типовых звеньев удобно осуществить, рассматривая
Типовые звенья САУ и их характеристики
Классификацию типовых звеньев удобно осуществить, рассматривая
Типовые звенья САУ и их характеристики
Вынесем x(p) и y(p) за скобки:
Передаточная
Типовые звенья САУ и их характеристики
Вынесем x(p) и y(p) за скобки:
Передаточная
Типовые звенья САУ и их характеристики
Принято уравнение:
записывать в виде (разделив на
Типовые звенья САУ и их характеристики
Принято уравнение:
записывать в виде (разделив на
Типовые звенья САУ и их характеристики
Передаточная функция из уравнения:
в общем виде
Типовые звенья САУ и их характеристики
Передаточная функция из уравнения:
в общем виде
Типовые звенья САУ и их характеристики
Типовые динамические звенья делятся по зависимостям
Типовые звенья САУ и их характеристики
Типовые динамические звенья делятся по зависимостям
Типовые звенья САУ и их характеристики
Подробно на лабораторных работах.
Пример:
Типовые звенья САУ и их характеристики
Подробно на лабораторных работах.
Пример:
Типовые звенья САУ и их характеристики
Подробно на лабораторных работах.
Пример:
Типовые звенья САУ и их характеристики
Подробно на лабораторных работах.
Пример:
Временные характеристики
Временными характеристиками звена или САУ являются переходная функция h(t) и
Временные характеристики
Временными характеристиками звена или САУ являются переходная функция h(t) и
Временные характеристики
Дельта-функция или функция Дирака получается при дифференцировании единичной ступенчатой функции
Временные характеристики
Дельта-функция или функция Дирака получается при дифференцировании единичной ступенчатой функции
Временные характеристики
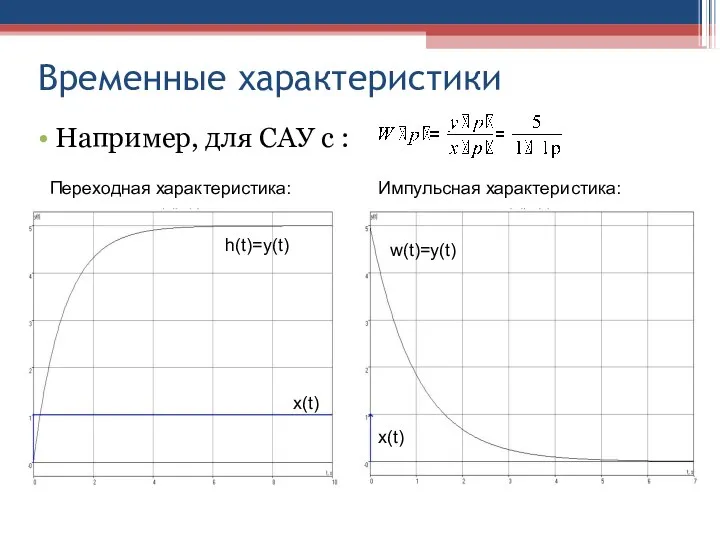
Например, для САУ с :
Переходная характеристика:
Импульсная характеристика:
x(t)
x(t)
h(t)=y(t)
w(t)=y(t)
Временные характеристики
Например, для САУ с :
Переходная характеристика:
Импульсная характеристика:
x(t)
x(t)
h(t)=y(t)
w(t)=y(t)
Временные характеристики
Например, для САУ с :
Переходная характеристика:
Импульсная характеристика:
x(t)
h(t)=y(t)
x(t)
w(t)=y(t)
Временные характеристики
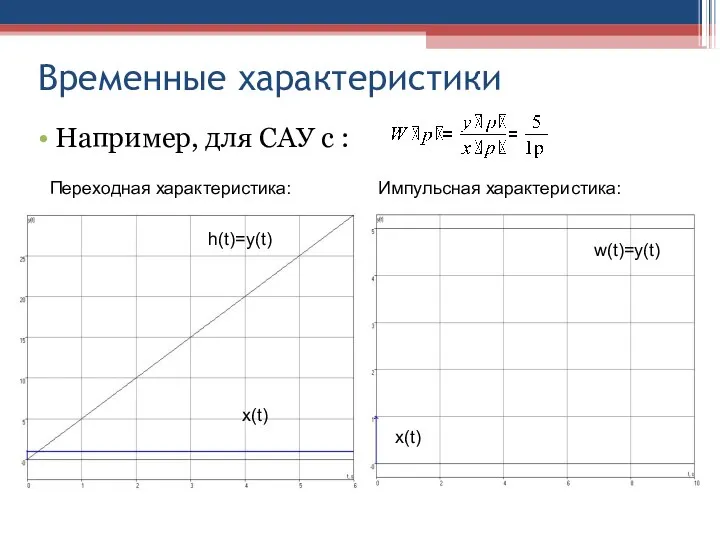
Например, для САУ с :
Переходная характеристика:
Импульсная характеристика:
x(t)
h(t)=y(t)
x(t)
w(t)=y(t)
Временные характеристики
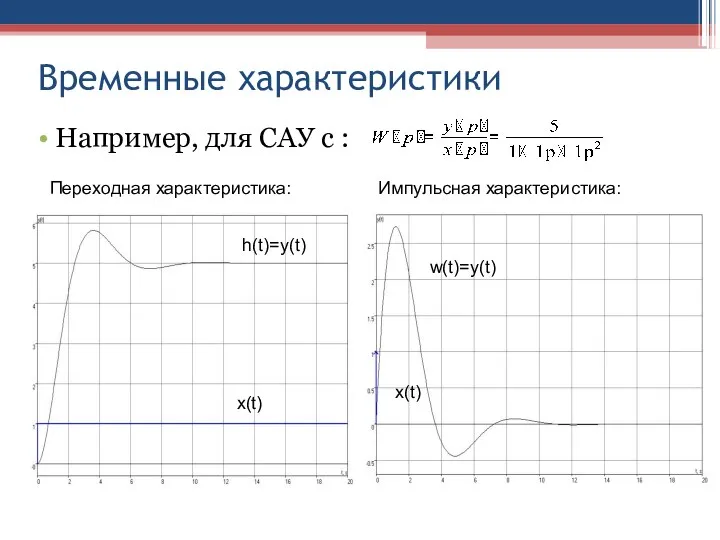
Например, для САУ с :
Переходная характеристика:
Импульсная характеристика:
x(t)
w(t)=y(t)
x(t)
h(t)=y(t)
Временные характеристики
Например, для САУ с :
Переходная характеристика:
Импульсная характеристика:
x(t)
w(t)=y(t)
x(t)
h(t)=y(t)
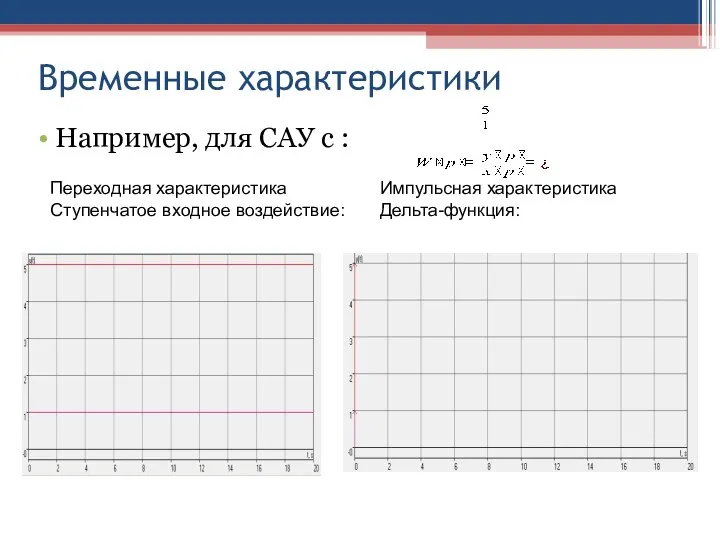
Временные характеристики
Например, для САУ с :
Переходная характеристика
Ступенчатое входное воздействие:
Импульсная характеристика
Дельта-функция:
Временные характеристики
Например, для САУ с :
Переходная характеристика
Ступенчатое входное воздействие:
Импульсная характеристика
Дельта-функция:

Временные характеристики
Например, для САУ с :
Линейное входное воздействие:
Параболическое входное воздействие:
Временные характеристики
Например, для САУ с :
Линейное входное воздействие:
Параболическое входное воздействие:
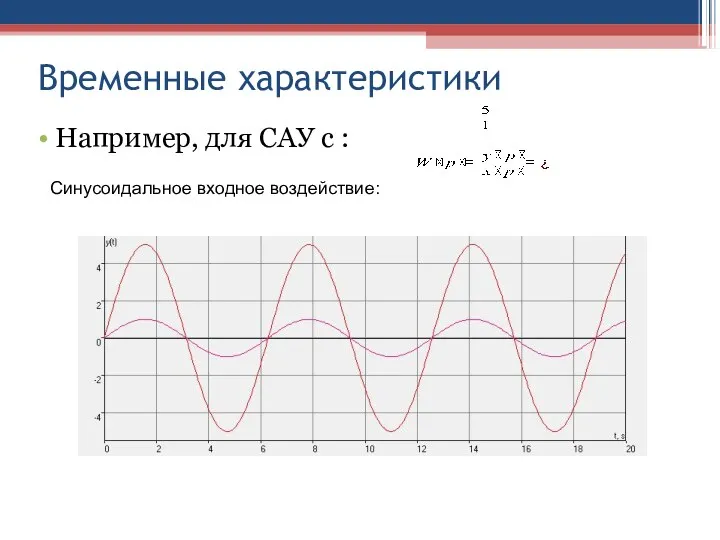
Временные характеристики
Например, для САУ с :
Синусоидальное входное воздействие:
Временные характеристики
Например, для САУ с :
Синусоидальное входное воздействие:
Частотные характеристики
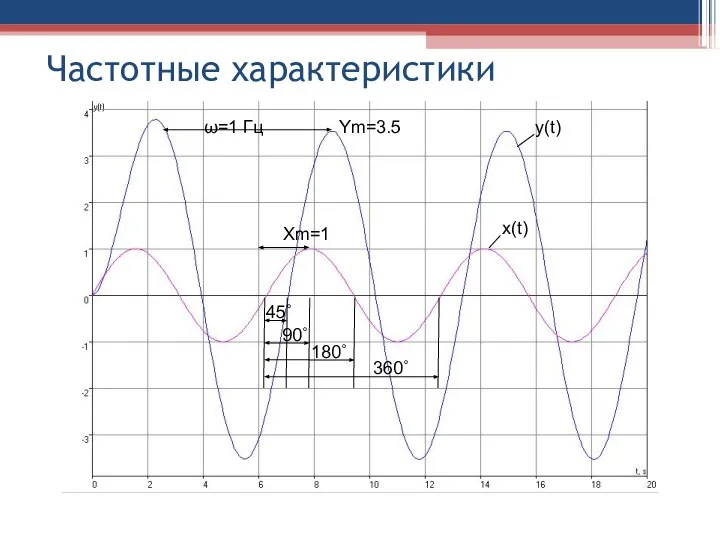
Частотные характеристики представляют собой зависимость амплитуды и фазы выходного сигнала
Частотные характеристики
Частотные характеристики представляют собой зависимость амплитуды и фазы выходного сигнала
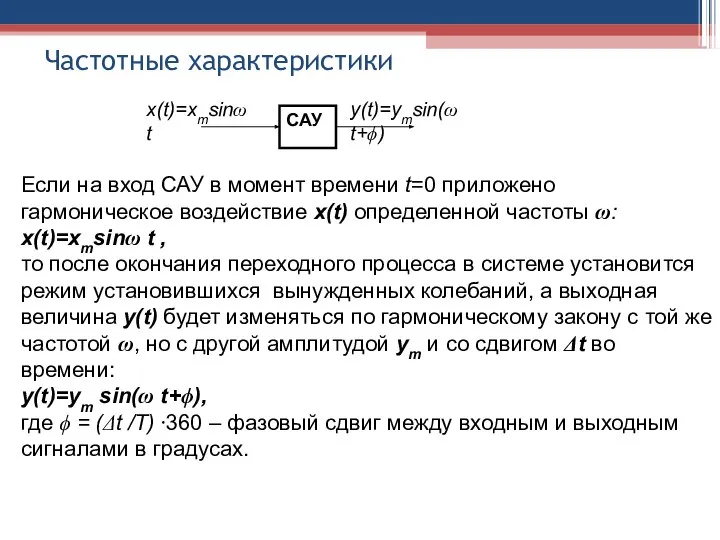
Частотные характеристики
Если на вход САУ в момент времени t=0 приложено гармоническое
Частотные характеристики
Если на вход САУ в момент времени t=0 приложено гармоническое
Частотные характеристики
Частотные характеристики
Частотные характеристики
Изменяя частоту ω от 0 до ∝ при постоянном
Частотные характеристики
Изменяя частоту ω от 0 до ∝ при постоянном
Частотные характеристики
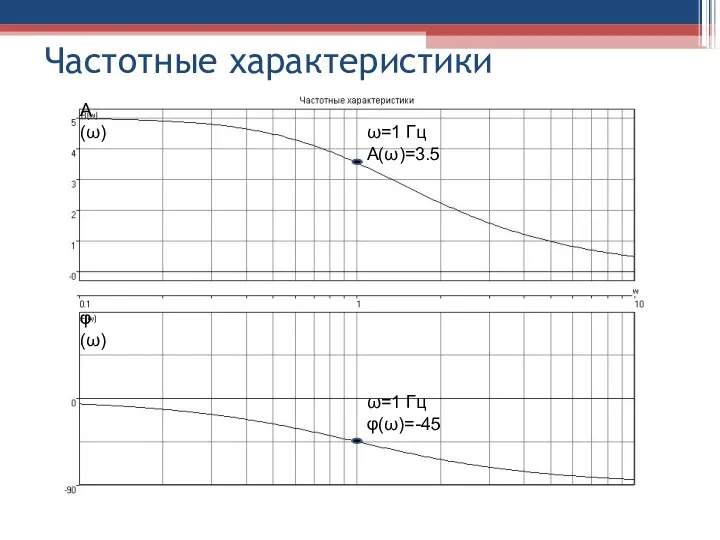
Зависимость отношения амплитуд выходного и входного сигнала от частоты
Частотные характеристики
Зависимость отношения амплитуд выходного и входного сигнала от частоты
Частотные характеристики
Зависимость фазового сдвига между входным и выходным сигналами от частоты
Частотные характеристики
Зависимость фазового сдвига между входным и выходным сигналами от частоты
Частотные характеристики
Частотные характеристики
Частотные характеристики
Частотные характеристики
Частотные характеристики
При объединении амплитудной и фазовой частотных характеристик в одну получают
Частотные характеристики
При объединении амплитудной и фазовой частотных характеристик в одну получают
Частотные характеристики
Амплитудно-фазовая частотная характеристика W(jω) является функцией комплексного переменного jω.
Модуль
Частотные характеристики
Амплитудно-фазовая частотная характеристика W(jω) является функцией комплексного переменного jω.
Модуль
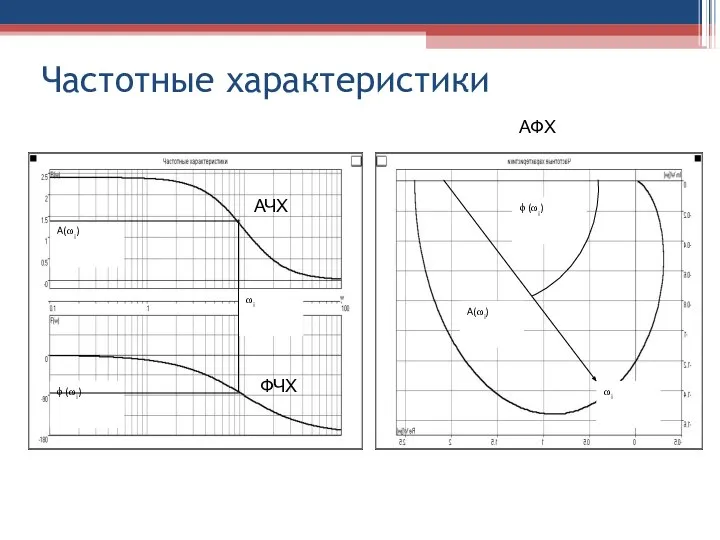
Частотные характеристики
АФХ
АЧХ
ФЧХ
Частотные характеристики
АФХ
АЧХ
ФЧХ
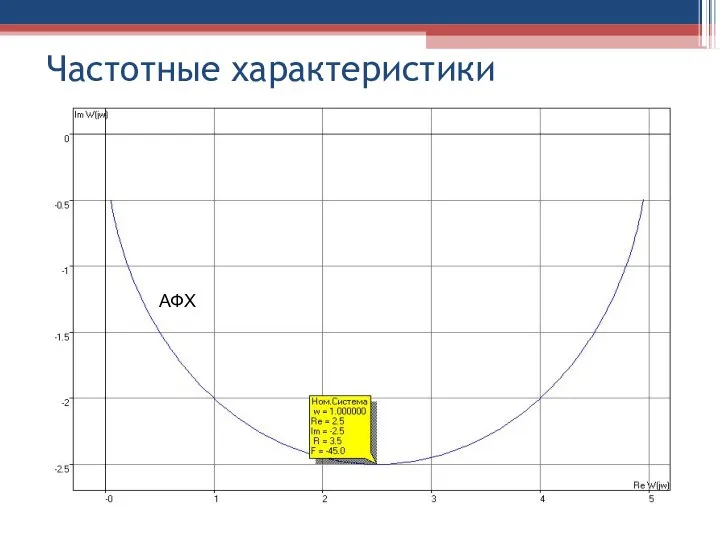
Частотные характеристики
АФХ
Частотные характеристики
АФХ
Частотные характеристики
Выражение для амплитудно-фазовой характеристики конкретного элемента можно получить из его
Частотные характеристики
Выражение для амплитудно-фазовой характеристики конкретного элемента можно получить из его
Далее пример просто показать. Не под запись.
Далее пример просто показать. Не под запись.
Частотные характеристики
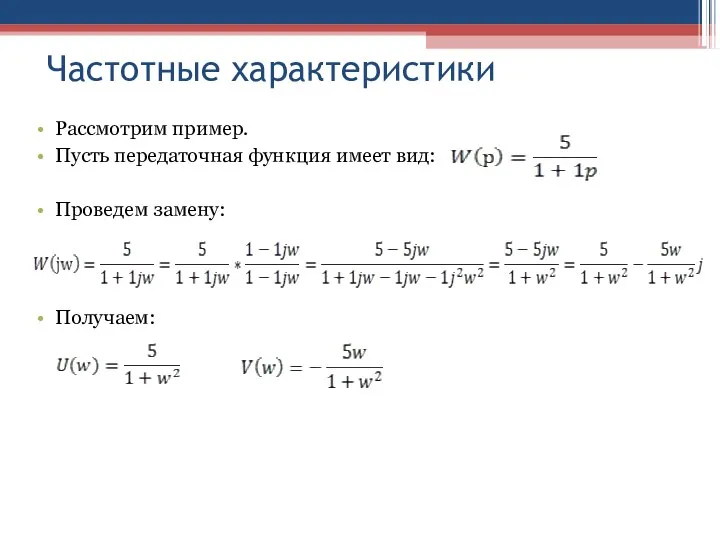
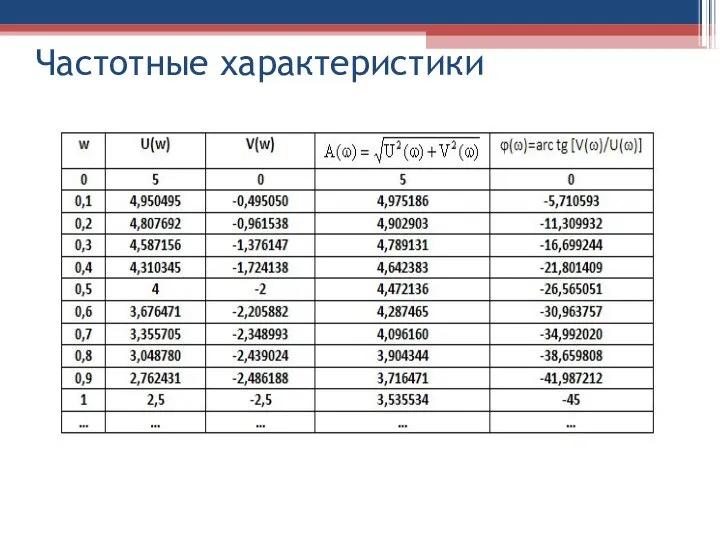
Рассмотрим пример.
Пусть передаточная функция имеет вид:
Проведем замену:
Получаем:
Частотные характеристики
Рассмотрим пример.
Пусть передаточная функция имеет вид:
Проведем замену:
Получаем:
Частотные характеристики
Частотные характеристики
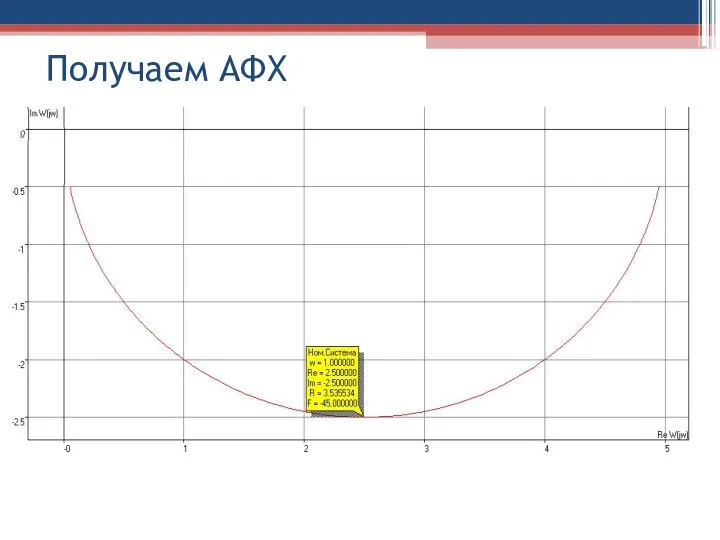
Получаем АФХ
Получаем АФХ
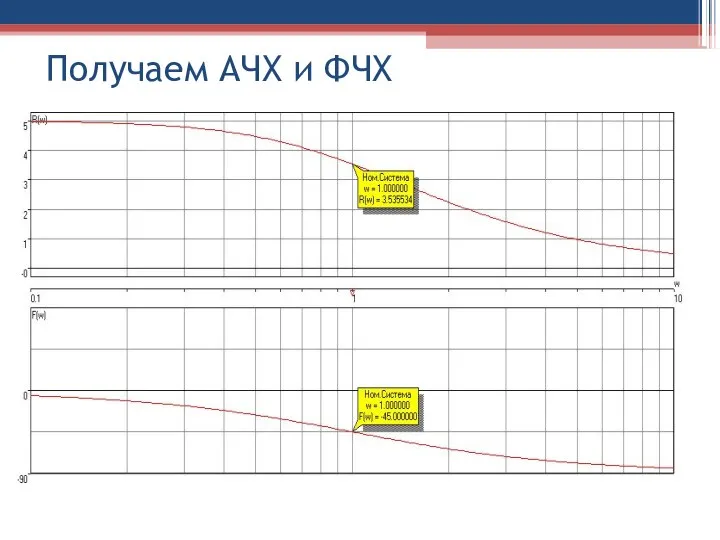
Получаем АЧХ и ФЧХ
Получаем АЧХ и ФЧХ
Частотные характеристики
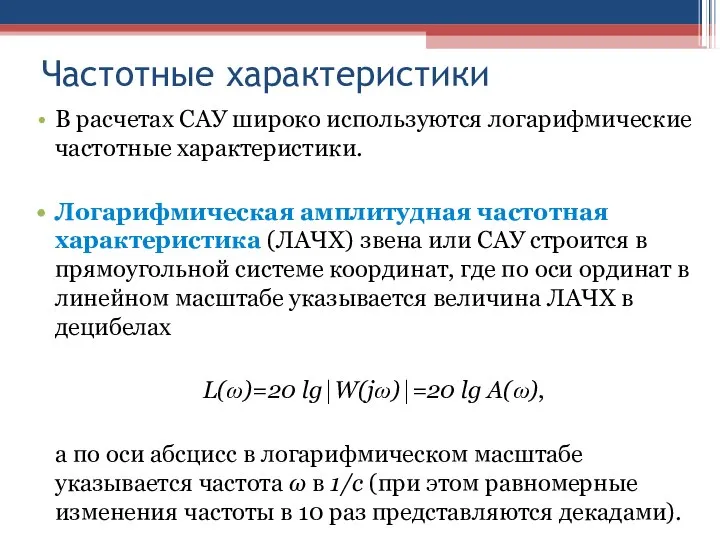
В расчетах САУ широко используются логарифмические частотные характеристики.
Логарифмическая амплитудная
Частотные характеристики
В расчетах САУ широко используются логарифмические частотные характеристики.
Логарифмическая амплитудная
Частотные характеристики
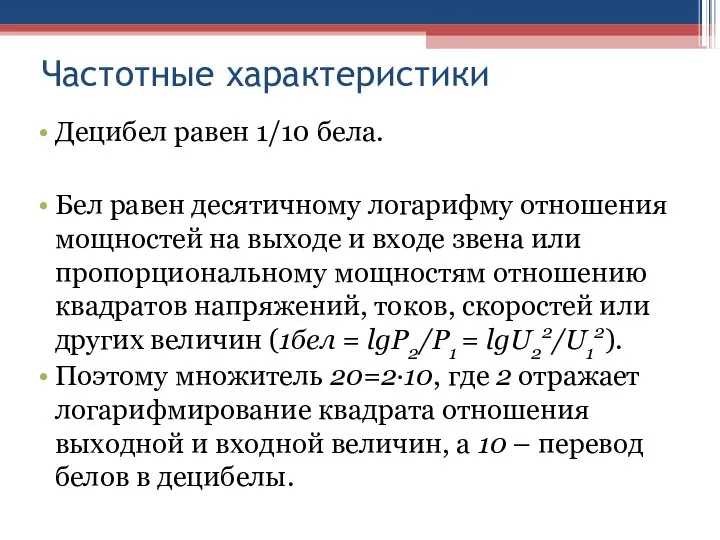
Децибел равен 1/10 бела.
Бел равен десятичному логарифму отношения мощностей на
Частотные характеристики
Децибел равен 1/10 бела.
Бел равен десятичному логарифму отношения мощностей на
![Частотные характеристики Логарифмическая фазовая частотная характеристика (ЛФЧХ) φ(ω)=arctg[V(ω)/U(ω)] звена или САУ](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/1303348/slide-58.jpg)
Частотные характеристики
Логарифмическая фазовая частотная характеристика (ЛФЧХ) φ(ω)=arctg[V(ω)/U(ω)] звена или САУ строится
Частотные характеристики
Логарифмическая фазовая частотная характеристика (ЛФЧХ) φ(ω)=arctg[V(ω)/U(ω)] звена или САУ строится
Частотные характеристики
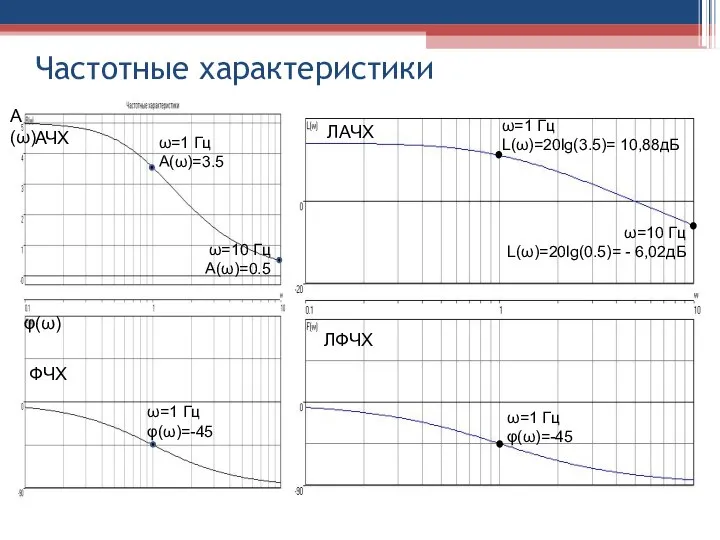
ω=1 Гц
L(ω)=20lg(3.5)= 10,88дБ
Частотные характеристики
ω=1 Гц
L(ω)=20lg(3.5)= 10,88дБ
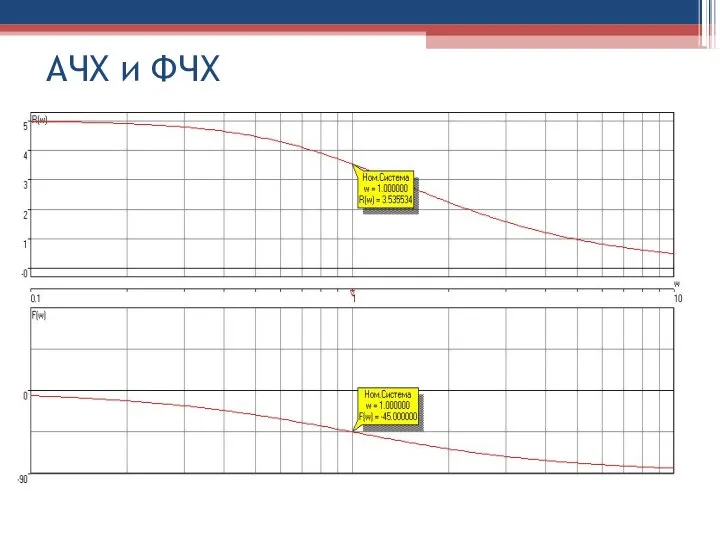
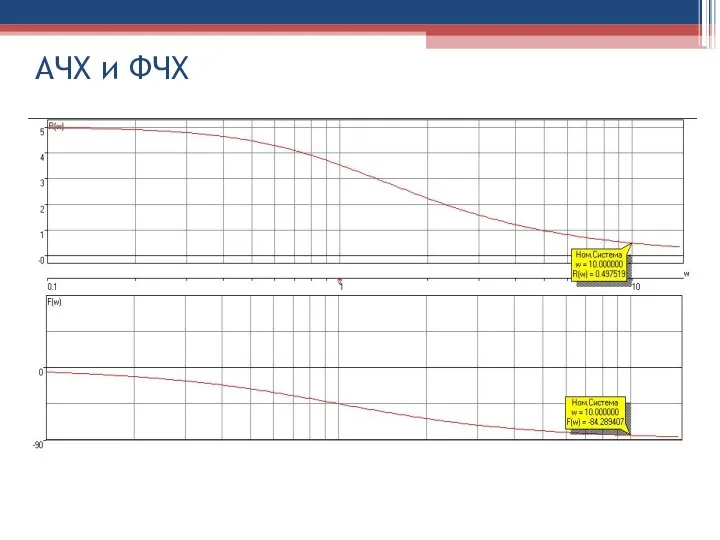
АЧХ и ФЧХ
АЧХ и ФЧХ
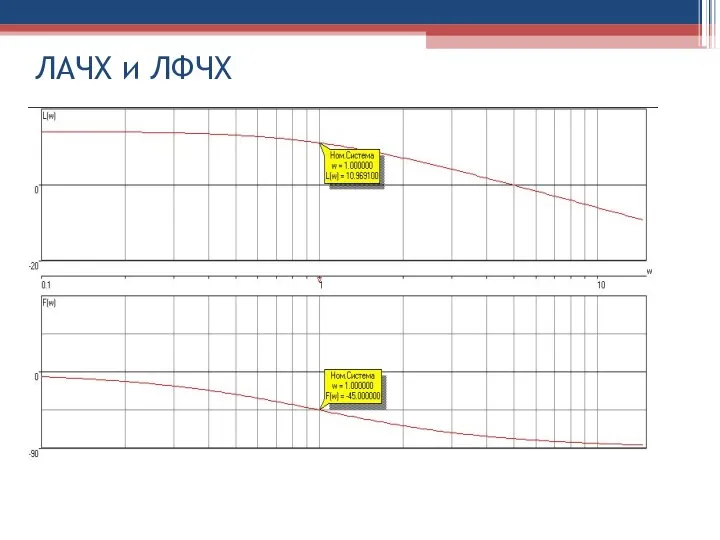
ЛАЧХ и ЛФЧХ
ЛАЧХ и ЛФЧХ
АЧХ и ФЧХ
АЧХ и ФЧХ
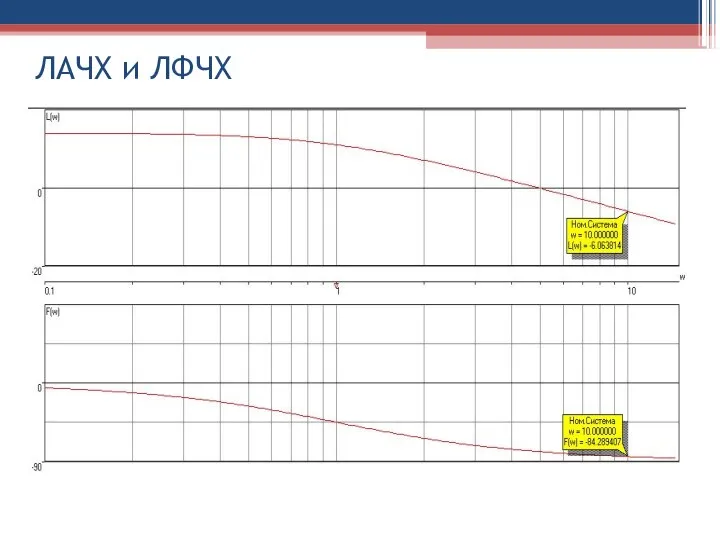
ЛАЧХ и ЛФЧХ
ЛАЧХ и ЛФЧХ
САУ представляется её функциональной, алгоритмической и конструктивной структурами (структурными схемами).
САУ представляется её функциональной, алгоритмической и конструктивной структурами (структурными схемами).
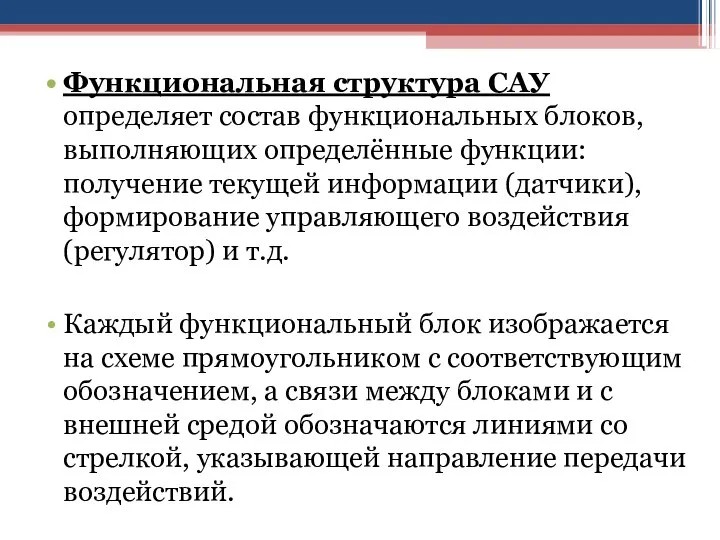
Функциональная структура САУ определяет состав функциональных блоков, выполняющих определённые функции: получение
Функциональная структура САУ определяет состав функциональных блоков, выполняющих определённые функции: получение
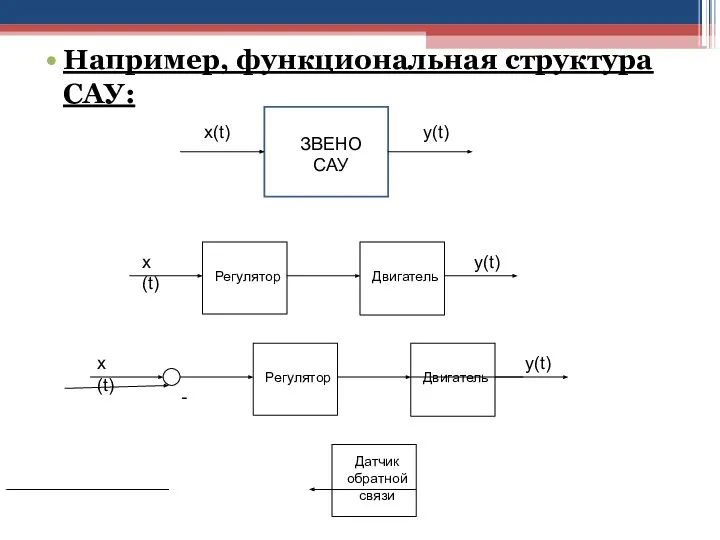
Например, функциональная структура САУ:
Например, функциональная структура САУ:
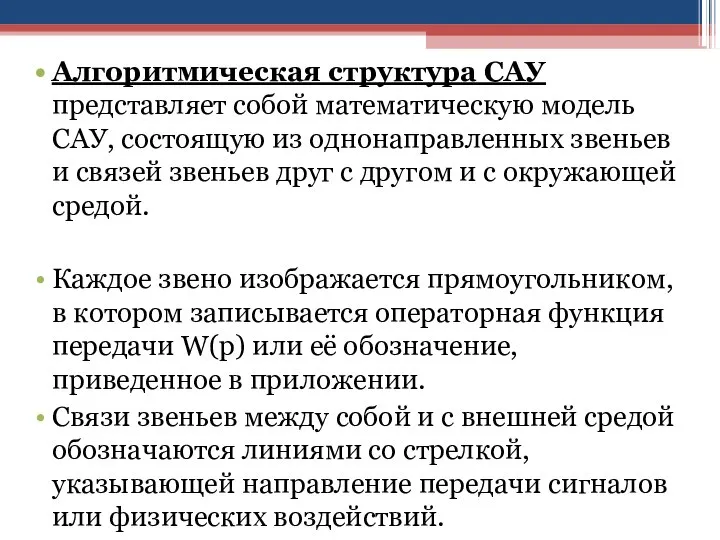
Алгоритмическая структура САУ представляет собой математическую модель САУ, состоящую из однонаправленных
Алгоритмическая структура САУ представляет собой математическую модель САУ, состоящую из однонаправленных
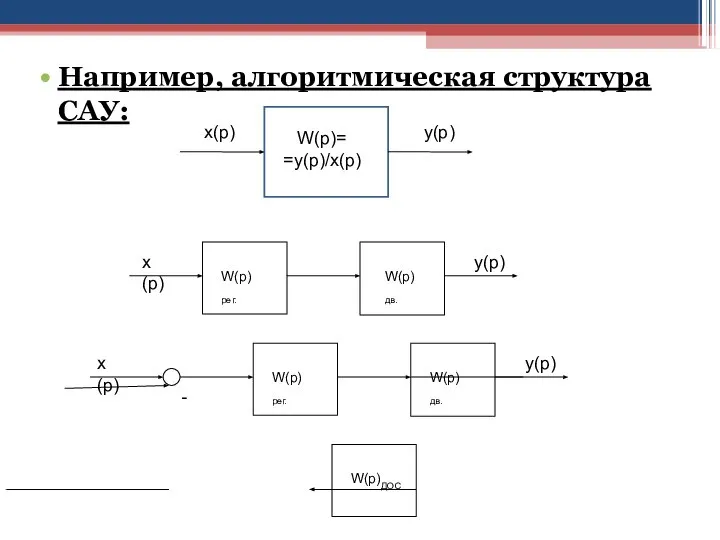
Например, алгоритмическая структура САУ:
Например, алгоритмическая структура САУ:
Конструктивная структура САУ определяет состав её конструктивных элементов и связей их
Конструктивная структура САУ определяет состав её конструктивных элементов и связей их
Например, конструктивная структура САУ:
Например, конструктивная структура САУ:
Ниже пример того, как составляются
дифференциальные уравнения.
Ниже пример того, как составляются
дифференциальные уравнения.
Математические модели САУ
Например:
Пусть дана схема:
Требуется составить дифференциальное уравнение электрической цепи:
Входной величиной
Математические модели САУ
Например:
Пусть дана схема:
Требуется составить дифференциальное уравнение электрической цепи:
Входной величиной
Математические модели САУ
Например:
Пусть дана схема:
На основании закона Кирхгофа при нулевых
начальных условиях
Математические модели САУ
Например:
Пусть дана схема:
На основании закона Кирхгофа при нулевых
начальных условиях
Математические модели САУ
Например:
Пусть дана схема:
Выходное напряжение U2 :
U2(t)= (1/C)*∫ i(t)dt (2)
Продифференцируем
Математические модели САУ
Например:
Пусть дана схема:
Выходное напряжение U2 :
U2(t)= (1/C)*∫ i(t)dt (2)
Продифференцируем
Математические модели САУ
Например:
Пусть дана схема:
Подставим (3) в уравнение (1):
Уравнение (4) –
Математические модели САУ
Например:
Пусть дана схема:
Подставим (3) в уравнение (1):
Уравнение (4) –
Ниже пример того, как составляются
ОФП.
Ниже пример того, как составляются
ОФП.
Математические модели САУ
Например:
Пусть дана схема:
Ранее получили дифференциальное уравнение данной цепи (звена):
Получаем
Математические модели САУ
Например:
Пусть дана схема:
Ранее получили дифференциальное уравнение данной цепи (звена):
Получаем
Математические модели САУ
Например:
Пусть дана схема:
Запишем согласно (5) ОФП:
U1 (p) =RC*U2(p)*p +
Математические модели САУ
Например:
Пусть дана схема:
Запишем согласно (5) ОФП:
U1 (p) =RC*U2(p)*p +
Математические модели САУ
Например:
Пусть дана схема:
Пусть R=20кОм, С=5мкФ.
Тогда ОФП:
Математические модели САУ
Например:
Пусть дана схема:
Пусть R=20кОм, С=5мкФ.
Тогда ОФП:
Рассмотрим методику получения временных и частотных характеристик на примере апериодического (инерционного)
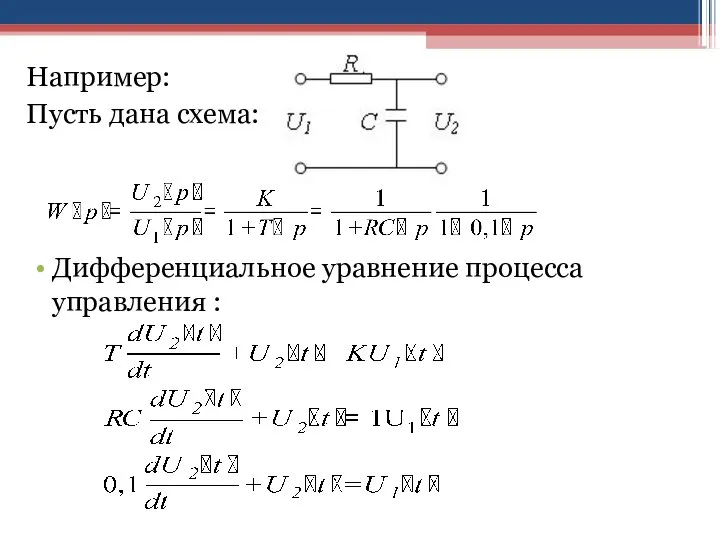
Например:
Пусть дана схема:
Дифференциальное уравнение процесса управления :
Например:
Пусть дана схема:
Дифференциальное уравнение процесса управления :
Переходная функция звена h(t)=y(t)=U2(t) получается в виде суммы общего и частного
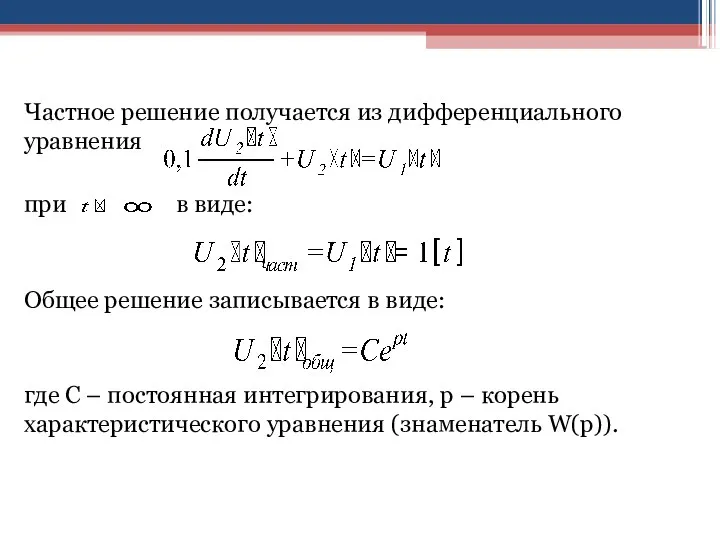
Частное решение получается из дифференциального уравнения
при в виде:
Общее решение записывается
при в виде:
Общее решение записывается
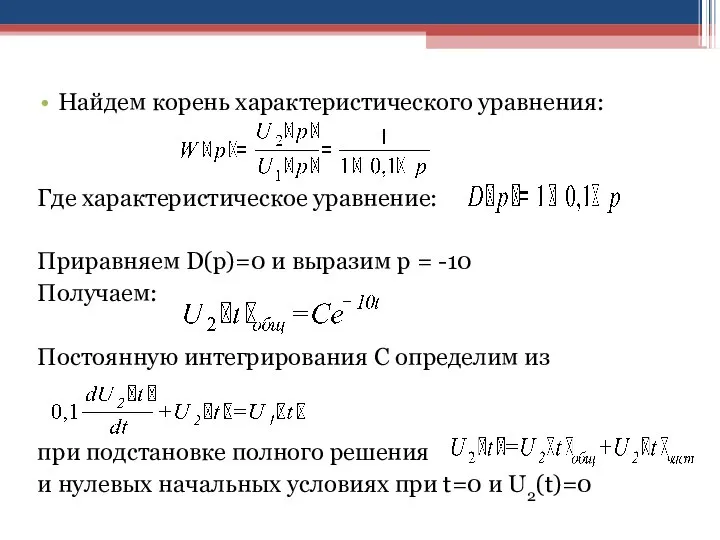
Найдем корень характеристического уравнения:
Где характеристическое уравнение:
Приравняем D(p)=0 и выразим p
Найдем корень характеристического уравнения:
Где характеристическое уравнение:
Приравняем D(p)=0 и выразим p
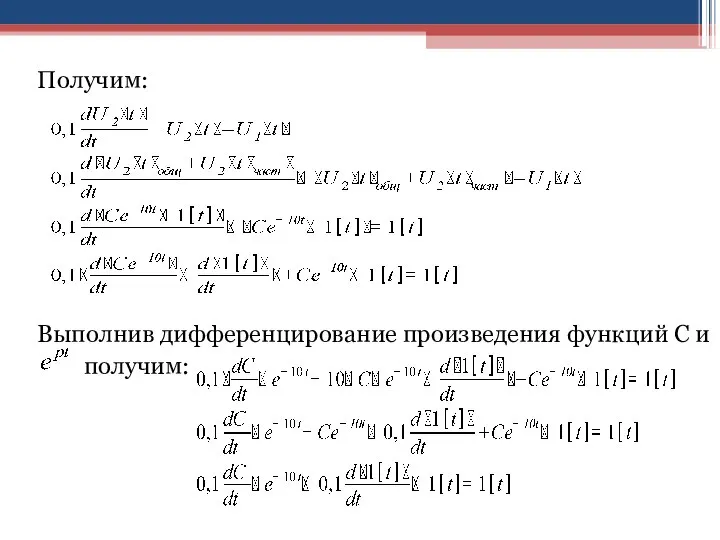
Получим:
Выполнив дифференцирование произведения функций С и
получим:
Получим:
Выполнив дифференцирование произведения функций С и
получим:
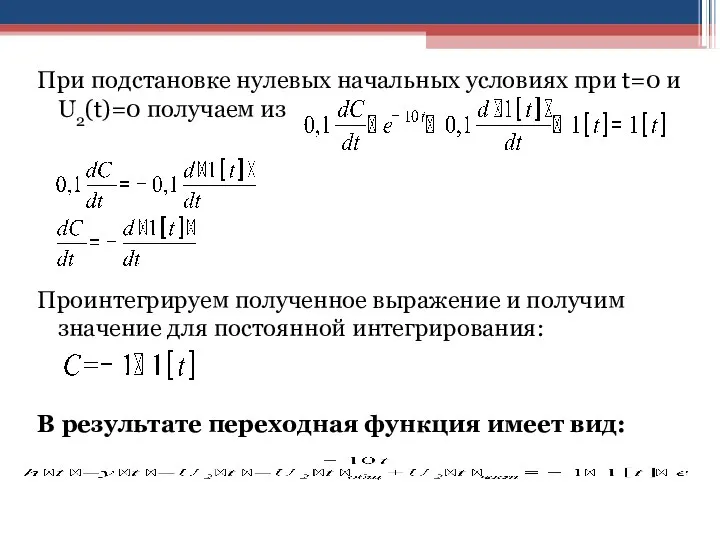
При подстановке нулевых начальных условиях при t=0 и U2(t)=0 получаем из
Проинтегрируем
При подстановке нулевых начальных условиях при t=0 и U2(t)=0 получаем из
Проинтегрируем
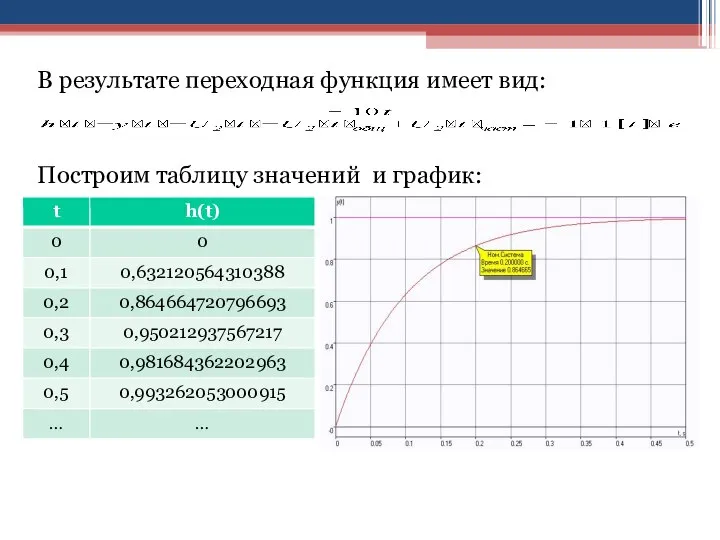
В результате переходная функция имеет вид:
Построим таблицу значений и график:
В результате переходная функция имеет вид:
Построим таблицу значений и график:
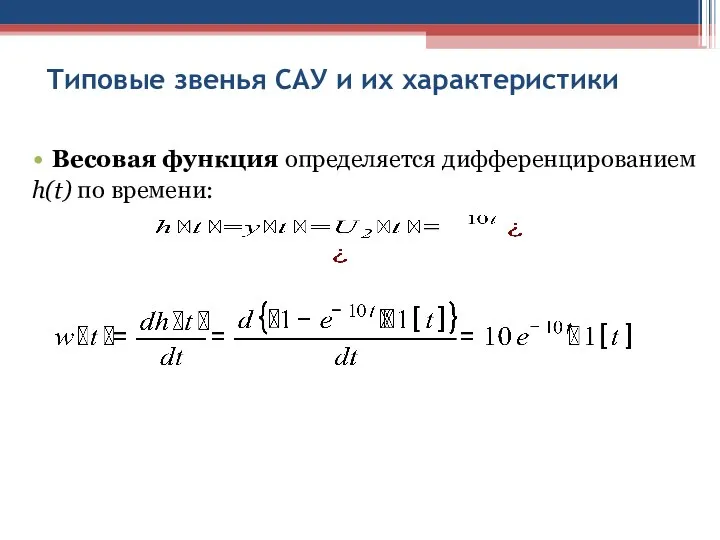
Типовые звенья САУ и их характеристики
Весовая функция определяется дифференцированием
h(t) по
Типовые звенья САУ и их характеристики
Весовая функция определяется дифференцированием
h(t) по
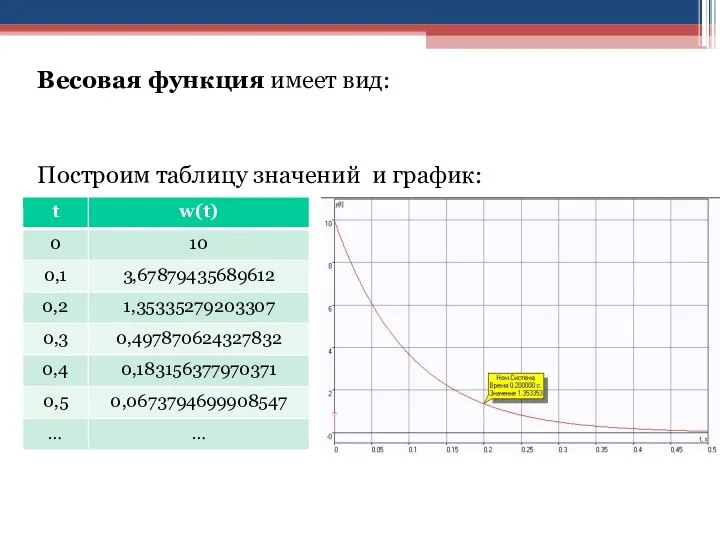
Весовая функция имеет вид:
Построим таблицу значений и график:
Весовая функция имеет вид:
Построим таблицу значений и график:
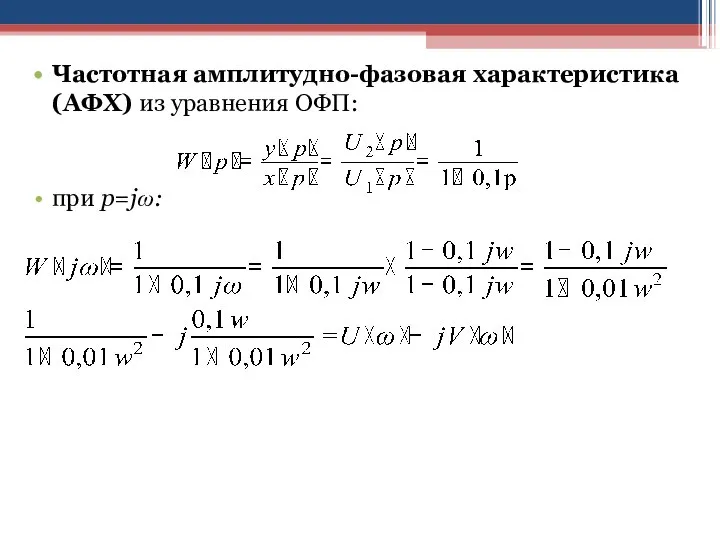
Частотная амплитудно-фазовая характеристика (АФХ) из уравнения ОФП:
при p=jω:
Частотная амплитудно-фазовая характеристика (АФХ) из уравнения ОФП:
при p=jω:
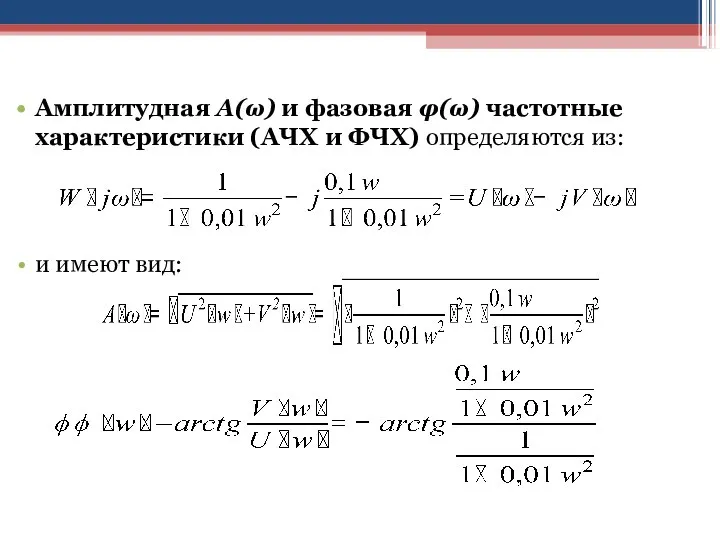
Амплитудная А(ω) и фазовая φ(ω) частотные характеристики (АЧХ и ФЧХ) определяются
Амплитудная А(ω) и фазовая φ(ω) частотные характеристики (АЧХ и ФЧХ) определяются
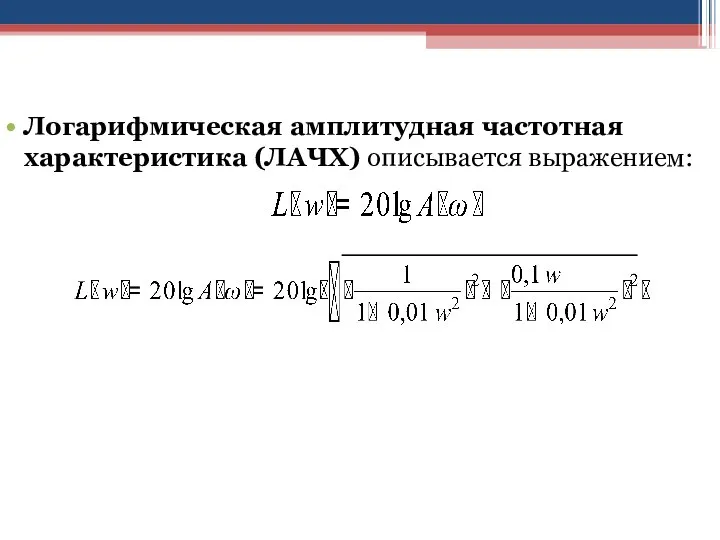
Логарифмическая амплитудная частотная характеристика (ЛАЧХ) описывается выражением:
Логарифмическая амплитудная частотная характеристика (ЛАЧХ) описывается выражением:
Логарифмическая фазовая частотная характеристика (ЛФЧХ) звена имеет такое же расчетное выражение
Логарифмическая фазовая частотная характеристика (ЛФЧХ) звена имеет такое же расчетное выражение
Строим таблицу значений и графики:
Строим таблицу значений и графики:
где
Re(w)=U(w);
Im(w)=V(w);
R(w)=A(w)=АЧХ;
F(w)=φ(w)=ФЧХ
АФХ
где
Re(w)=U(w);
Im(w)=V(w);
R(w)=A(w)=АЧХ;
F(w)=φ(w)=ФЧХ
АФХ
где
R(w)=A(w)=АЧХ;
F(w)=φ(w)=ФЧХ
АЧХ
ФЧХ
где
R(w)=A(w)=АЧХ;
F(w)=φ(w)=ФЧХ
АЧХ
ФЧХ
где
R(w)=A(w)=АЧХ;
F(w)=φ(w)=ФЧХ
АЧХ
ФЧХ
где
R(w)=A(w)=АЧХ;
F(w)=φ(w)=ФЧХ
АЧХ
ФЧХ
где
L(w)=ЛАЧХ;
F(w)=φ(w)=ЛФЧХ
ЛАЧХ
ЛФЧХ
где
L(w)=ЛАЧХ;
F(w)=φ(w)=ЛФЧХ
ЛАЧХ
ЛФЧХ
где
L(w)=ЛАЧХ;
F(w)=φ(w)=ЛФЧХ
ЛАЧХ
ЛФЧХ
где
L(w)=ЛАЧХ;
F(w)=φ(w)=ЛФЧХ
ЛАЧХ
ЛФЧХ
Для описания модели САУ обычно используется три способа:
1) поэлементное описание САУ
Для описания модели САУ обычно используется три способа:
1) поэлементное описание САУ
Для описания модели САУ обычно используется три способа:
2) системное описание САУ
Для описания модели САУ обычно используется три способа:
2) системное описание САУ
Для описания модели САУ обычно используется три способа:
3) векторно-матричное описание САУ
Для описания модели САУ обычно используется три способа:
3) векторно-матричное описание САУ
САУ одной выходной величиной y(t) состоит из объекта управления (ОУ) и
САУ одной выходной величиной y(t) состоит из объекта управления (ОУ) и
Устройство управления (УУ) выполняет целенаправленные операции управления технологическим процессом (ТП), формируя
Устройство управления (УУ) выполняет целенаправленные операции управления технологическим процессом (ТП), формируя
Объект управления (ОУ) в САУ выполняет рабочие операции осуществления ТП.
Для этого
Объект управления (ОУ) в САУ выполняет рабочие операции осуществления ТП.
Для этого
В устройстве управления (УУ) алгоритм управления формируется в регуляторе (Р), который
В устройстве управления (УУ) алгоритм управления формируется в регуляторе (Р), который
УУ могут строиться по трем основным принципам управления:
1) принцип разомкнутого управления
УУ могут строиться по трем основным принципам управления:
1) принцип разомкнутого управления
УУ могут строиться по трем основным принципам управления:
2) принцип компенсации возмущающего
УУ могут строиться по трем основным принципам управления:
2) принцип компенсации возмущающего
УУ могут строиться по трем основным принципам управления:
3) принцип обратной связи
УУ могут строиться по трем основным принципам управления:
3) принцип обратной связи
Все высокоточные САУ строятся по принципу обратной связи с возможной дополнительной
Все высокоточные САУ строятся по принципу обратной связи с возможной дополнительной
В УУ часто используются линейные алгоритмы управления:
- пропорциональный u(t)=K∙e(t),
- интегральный u(t)=K∫e(t)dt,
-
В УУ часто используются линейные алгоритмы управления:
- пропорциональный u(t)=K∙e(t),
- интегральный u(t)=K∫e(t)dt,
-
 Презентация Требования к лицам, поступающим на гражданскую службу в таможенные органы России
Презентация Требования к лицам, поступающим на гражданскую службу в таможенные органы России  Загальна характеристика звукового складу мови. Правила переносу слів
Загальна характеристика звукового складу мови. Правила переносу слів ОСНОВЫ ТЕХНОЛОГИИ САМОРАЗВИТИЯ ЛИЧНОСТИ «Искусство умственного и нравственного развития есть искусство возбуждения сердца и ум
ОСНОВЫ ТЕХНОЛОГИИ САМОРАЗВИТИЯ ЛИЧНОСТИ «Искусство умственного и нравственного развития есть искусство возбуждения сердца и ум Древнерусская культура Православие как фактор русской культуры Православная церковь
Древнерусская культура Православие как фактор русской культуры Православная церковь Покрытия промышленных зданий. (Лекция 7)
Покрытия промышленных зданий. (Лекция 7) Innovation project management
Innovation project management Клуб программистов Java. Установка Eclipse и JDK
Клуб программистов Java. Установка Eclipse и JDK Шахматная школа
Шахматная школа Види і категорії легкоатлетичних змагань
Види і категорії легкоатлетичних змагань ЕСКД. Форматы, масштабы, линии, шрифты
ЕСКД. Форматы, масштабы, линии, шрифты Улучшение визуализации. Настройка монитора
Улучшение визуализации. Настройка монитора Шанхайская организация сотрудничества (ШОС)
Шанхайская организация сотрудничества (ШОС) Спорт. Ми за здоровий спосіб життя!
Спорт. Ми за здоровий спосіб життя! Нормальные формы
Нормальные формы Әлемнің ең әдемі метрополитендері
Әлемнің ең әдемі метрополитендері Состав имущества предприятия Капитал предприятия
Состав имущества предприятия Капитал предприятия Свойства числовых неравенств
Свойства числовых неравенств Гигиенические требования к выбору и планировке земельного участка школы, к школьным зданиям и их внутренней планировке
Гигиенические требования к выбору и планировке земельного участка школы, к школьным зданиям и их внутренней планировке Проектирование пространства, функционала и деятельности инновационного научно-исследовательского и профориентационного центра
Проектирование пространства, функционала и деятельности инновационного научно-исследовательского и профориентационного центра Сетевое взаимодействие через сокеты
Сетевое взаимодействие через сокеты Презентация на тему ЭРА КИТАЯ
Презентация на тему ЭРА КИТАЯ Россия. Русский народ
Россия. Русский народ Формирование языковой культуры на уроках русского языка.
Формирование языковой культуры на уроках русского языка. Терроризм. История и эволюция
Терроризм. История и эволюция Здоровый образ жизни человека
Здоровый образ жизни человека Православный праздник Покров Пресвятой Богородицы
Православный праздник Покров Пресвятой Богородицы Художник и театр
Художник и театр Физиологическая характеристика двигательных качеств
Физиологическая характеристика двигательных качеств