- Physics-based Racing AI

Содержание
- 2. Game AI Conference, Paris June 2010
- 3. Overview Part 1 – Racing AI Tutorial Basics in Steering, Throttle & Brake managment Group behaviours
- 4. RACING AI TUTORIAL Part 1 Game AI Conference, Paris June 2010
- 5. AI - Physics interface Input: Steer, Throttle, Brake, ... Position, Direction, Speed, ... Game AI Conference,
- 6. AI - Physics interface Physics as a black box (too much complexity to forecast exactly the
- 7. Racing Line Generated Line Edited Line Game AI Conference, Paris June 2010
- 8. Representation Segments & Fixed Radius Curves Game AI Conference, Paris June 2010
- 9. Representation Splines (hermite) Edit Nodes (pos) Edit Tangents (dir & len) Game AI Conference, Paris June
- 10. Sampling the racing line Sample: Position Border Right Distance Border Left Distance Radius ... Game AI
- 11. Following the racing line Target Basic: Steer = Angle * Factor Angle Game AI Conference, Paris
- 12. Following the racing line Target Advanced: Steer = Lean which resulting radius leads to the target
- 13. Throttle and Brake managment 60 m/s 55 m/s 40 m/s 25 m/s Game AI Conference, Paris
- 14. Throttle and Brake managment Basic implementation: Speed Speed > Speed Target ? Brake = MAX Better
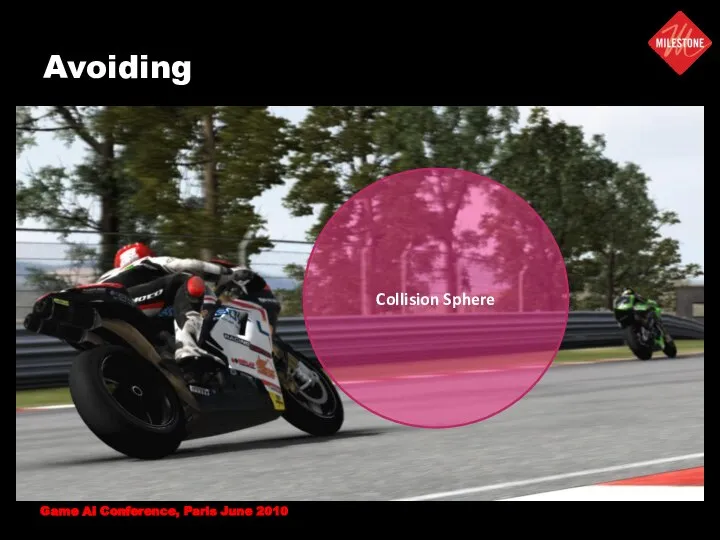
- 15. Recovery Mechanics Mechanics that detect a dangerous situation and apply an action to restore a safer
- 16. Avoiding Collision Sphere Game AI Conference, Paris June 2010
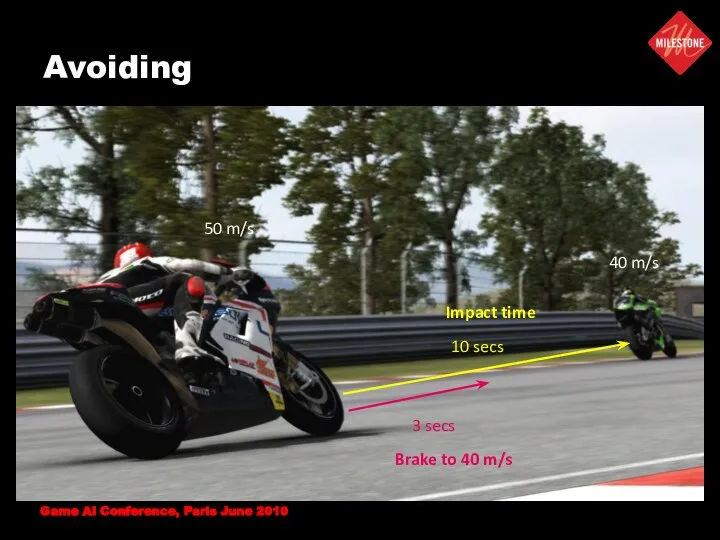
- 17. Avoiding 10 secs 50 m/s 40 m/s 3 secs Impact time Brake to 40 m/s Game
- 18. Overtake Overtake direction 40 m/s 50 m/s Game AI Conference, Paris June 2010
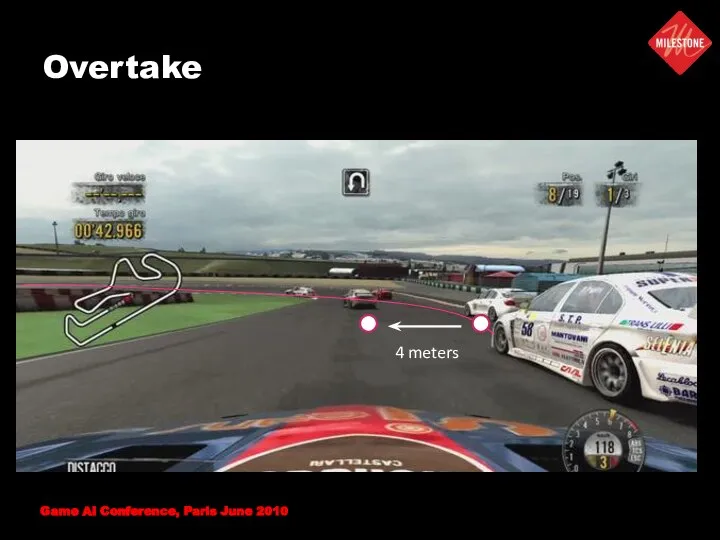
- 19. Overtake 4 meters Game AI Conference, Paris June 2010
- 20. Overtake Adding component to steer (Steer = SteerToTarget + C) Fast reaction Can increase/decrease dynamically the
- 21. Mistakes “Natural” errors Collisions Losing control in overtake/group situations Generated errors Steering, Throttle, Brake Falls (bike):
- 22. Car AI Game AI Conference, Paris June 2010
- 23. Bike AI Game AI Conference, Paris June 2010
- 24. A METHOD FOR OPTIMIZING AI PERFORMANCES Part 2 Game AI Conference, Paris June 2010
- 25. Fairness in racing games Common trick is using simplified (or helped) physics for Ais Easier to
- 26. Fairness in racing games Using (almost) the same player physics Much better under a visual point
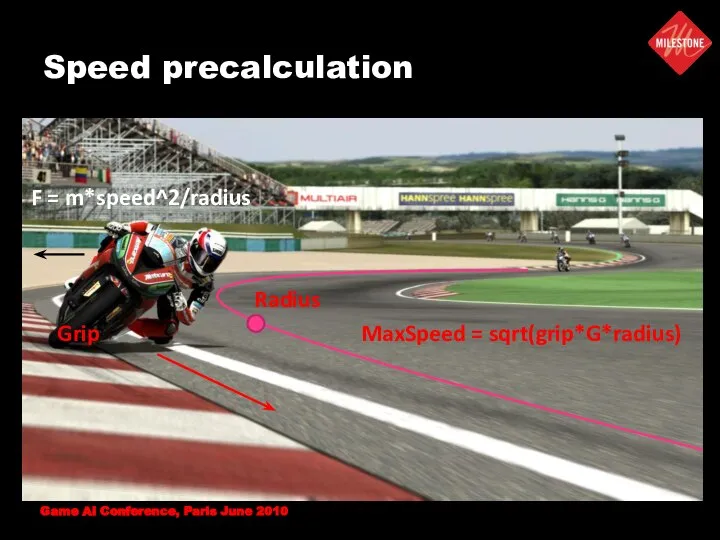
- 27. Speed precalculation Grip Radius F = m*speed^2/radius MaxSpeed = sqrt(grip*G*radius) Game AI Conference, Paris June 2010
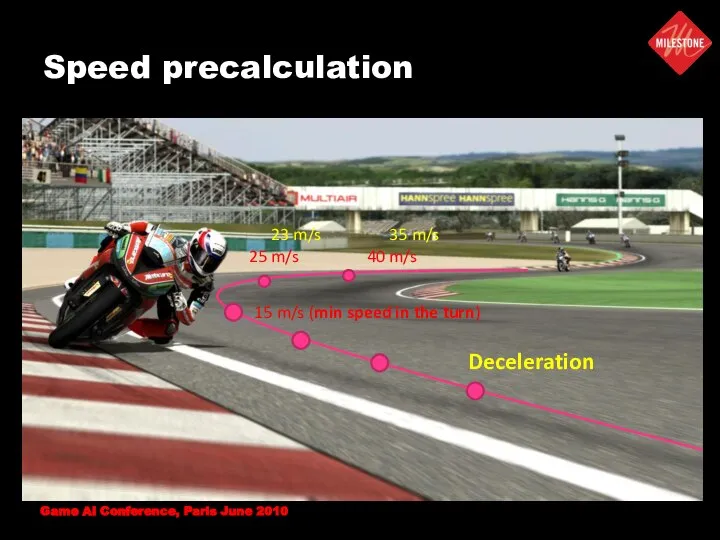
- 28. Speed precalculation 15 m/s (min speed in the turn) 25 m/s 40 m/s Deceleration 23 m/s
- 29. Speed precalculation You can tweak the precalculation affecting the grip and deceleration values the alghoritm consider
- 30. Dividing into sectors Sector 1 (Grip Mod 1, Dec Mod 1) Sector 2 (Grip Mod 2,
- 31. Iterative method Detect sectors in an automatic way Start when inverse radius != 0, end when
- 32. Iterative method Increment modifiers as soon as lap time decrease One lap could not be sufficient
- 33. Extra conditions Considering only lap time is often not sufficient Need extra conditions to be satisfied
- 34. Resulting Data Stored as a track asset For each sector: start sector info, end sector info,
- 35. Not optimized lap Game AI Conference, Paris June 2010
- 36. Grip modifiers BestTime = 128.11 Grip Modifier 0 = 1.00 BestTime = 127.76 BestTime = 127.45
- 37. Deceleration modifiers BestTime = 114.59 Dec Modifier 0 = 1.00 BestTime = 114.51 BestTime = 114.38
- 38. Optimized lap (no extra conditions) Game AI Conference, Paris June 2010
- 39. Adding extra conditions Example No out of track Ideal line distance Game AI Conference, Paris June
- 40. Optimized lap (with extra conditions) Game AI Conference, Paris June 2010
- 41. Advantages Simple implementation Editable results Speeds are still proportional to the radius Can tweak by affecting
- 42. Possible improvements Step managment Order optimization Extra conditions Acting not only on speeds (driving parameters) Game
- 43. Conclusions Fairness is very important Difficult to forecast physics (and track) Trying and see what happen
- 45. Скачать презентацию

Game AI Conference, Paris June 2010
Game AI Conference, Paris June 2010
Overview
Part 1 – Racing AI Tutorial
Basics in Steering, Throttle & Brake
Overview
Part 1 – Racing AI Tutorial
Basics in Steering, Throttle & Brake
RACING AI TUTORIAL
Part 1
Game AI Conference, Paris June 2010
RACING AI TUTORIAL
Part 1
Game AI Conference, Paris June 2010
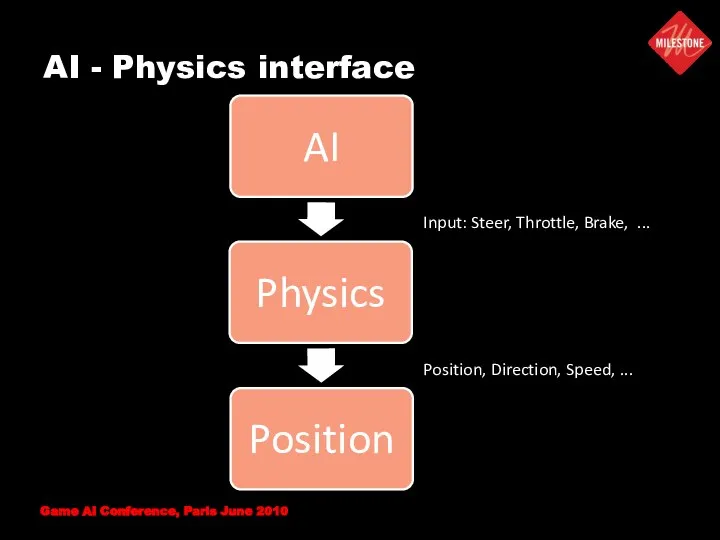
AI - Physics interface
Input: Steer, Throttle, Brake, ...
Position, Direction, Speed, ...
Game
AI - Physics interface
Input: Steer, Throttle, Brake, ...
Position, Direction, Speed, ...
Game
AI - Physics interface
Physics as a black box (too much complexity
AI - Physics interface
Physics as a black box (too much complexity
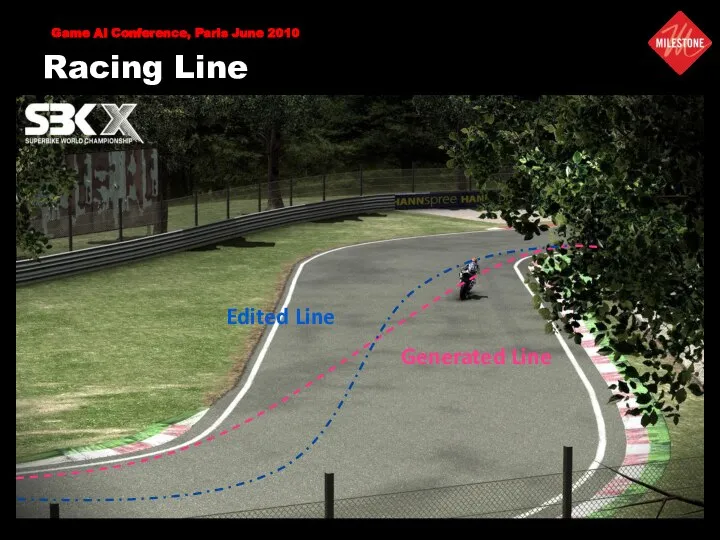
Racing Line
Generated Line
Edited Line
Game AI Conference, Paris June 2010
Racing Line
Generated Line
Edited Line
Game AI Conference, Paris June 2010
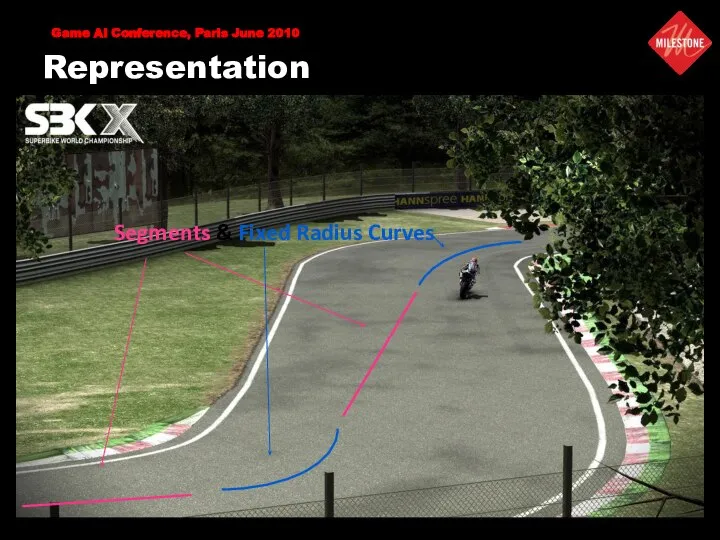
Representation
Segments & Fixed Radius Curves
Game AI Conference, Paris June 2010
Representation
Segments & Fixed Radius Curves
Game AI Conference, Paris June 2010
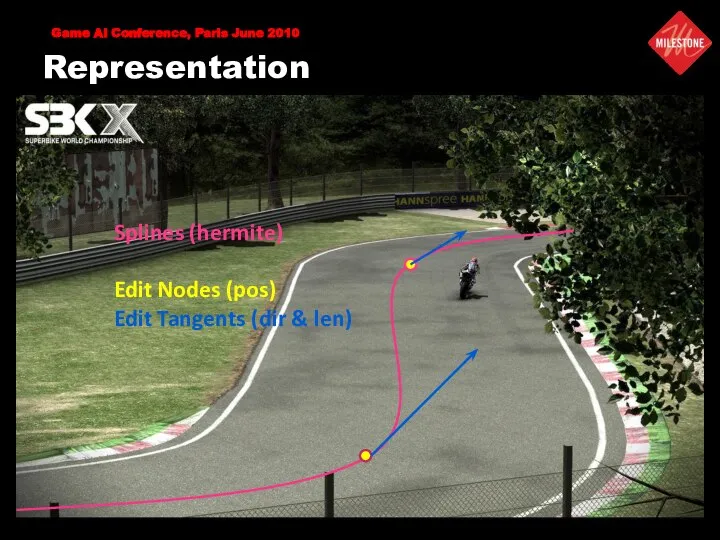
Representation
Splines (hermite)
Edit Nodes (pos)
Edit Tangents (dir & len)
Game AI Conference, Paris
Representation
Splines (hermite)
Edit Nodes (pos)
Edit Tangents (dir & len)
Game AI Conference, Paris
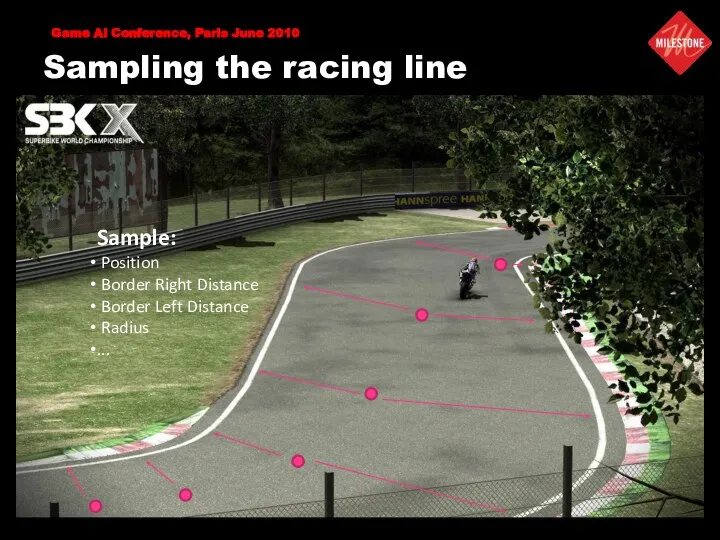
Sampling the racing line
Sample:
Position
Border Right Distance
Border Left Distance
Sampling the racing line
Sample:
Position
Border Right Distance
Border Left Distance
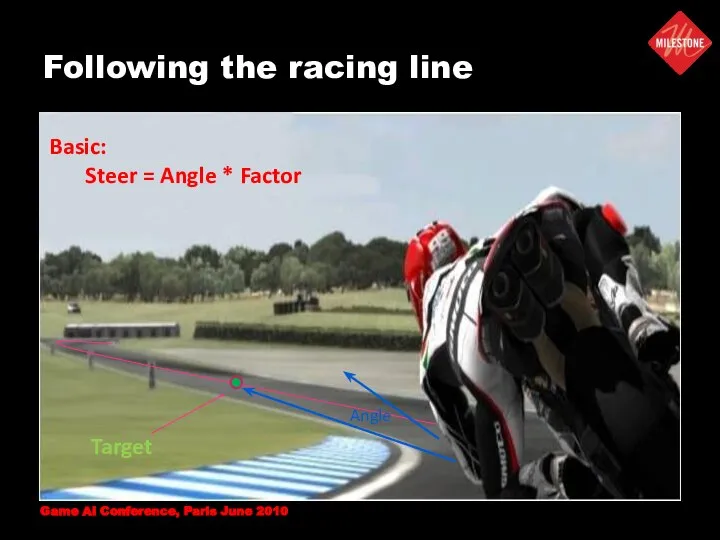
Following the racing line
Target
Basic:
Steer = Angle * Factor
Angle
Game AI Conference, Paris
Following the racing line
Target
Basic:
Steer = Angle * Factor
Angle
Game AI Conference, Paris
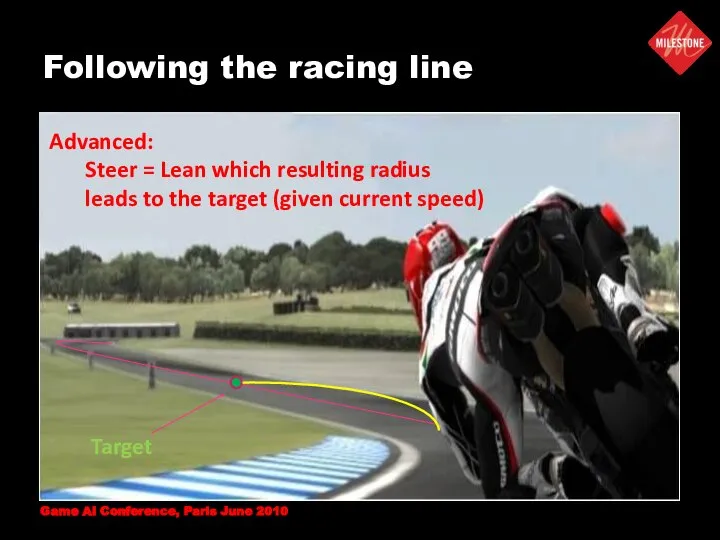
Following the racing line
Target
Advanced:
Steer = Lean which resulting radius
leads to
Following the racing line
Target
Advanced:
Steer = Lean which resulting radius
leads to

Throttle and Brake managment
60 m/s
55 m/s
40 m/s
25 m/s
Game AI Conference, Paris
Throttle and Brake managment
60 m/s
55 m/s
40 m/s
25 m/s
Game AI Conference, Paris
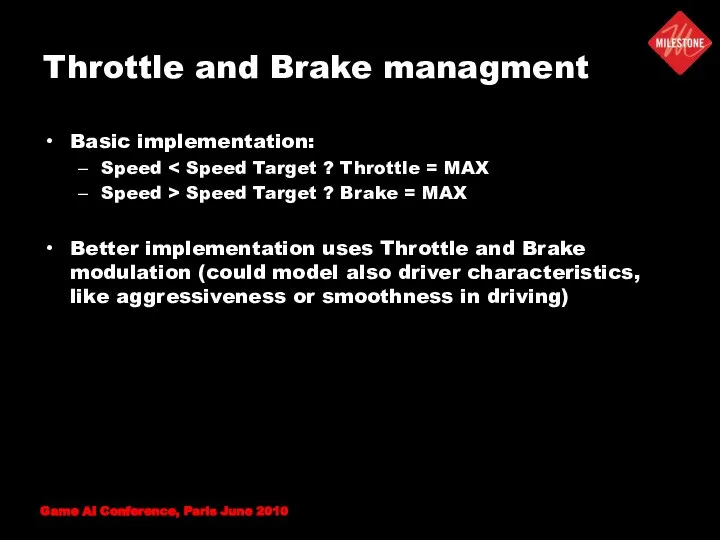
Throttle and Brake managment
Basic implementation:
Speed < Speed Target ? Throttle =
Throttle and Brake managment
Basic implementation:
Speed < Speed Target ? Throttle =
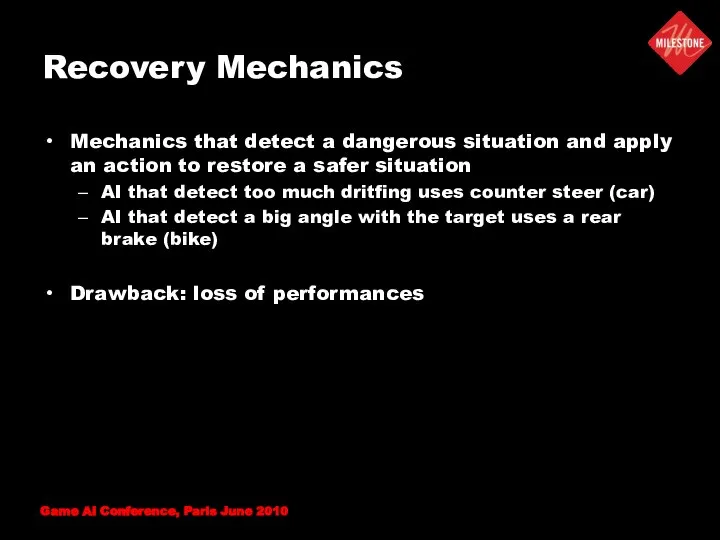
Recovery Mechanics
Mechanics that detect a dangerous situation and apply an action
Recovery Mechanics
Mechanics that detect a dangerous situation and apply an action
Avoiding
Collision Sphere
Game AI Conference, Paris June 2010
Avoiding
Collision Sphere
Game AI Conference, Paris June 2010
Avoiding
10 secs
50 m/s
40 m/s
3 secs
Impact time
Brake to 40 m/s
Game AI Conference,
Avoiding
10 secs
50 m/s
40 m/s
3 secs
Impact time
Brake to 40 m/s
Game AI Conference,

Overtake
Overtake direction
40 m/s
50 m/s
Game AI Conference, Paris June 2010
Overtake
Overtake direction
40 m/s
50 m/s
Game AI Conference, Paris June 2010
Overtake
4 meters
Game AI Conference, Paris June 2010
Overtake
4 meters
Game AI Conference, Paris June 2010
Overtake
Adding component to steer (Steer = SteerToTarget + C)
Fast reaction
Can increase/decrease
Overtake
Adding component to steer (Steer = SteerToTarget + C)
Fast reaction
Can increase/decrease
Mistakes
“Natural” errors
Collisions
Losing control in overtake/group situations
Generated errors
Steering, Throttle, Brake
Falls (bike): low
Mistakes
“Natural” errors
Collisions
Losing control in overtake/group situations
Generated errors
Steering, Throttle, Brake
Falls (bike): low
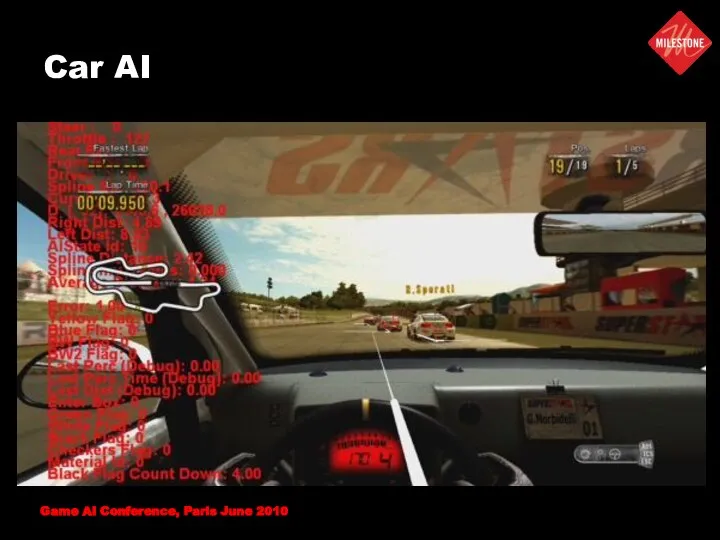
Car AI
Game AI Conference, Paris June 2010
Car AI
Game AI Conference, Paris June 2010

Bike AI
Game AI Conference, Paris June 2010
Bike AI
Game AI Conference, Paris June 2010
A METHOD FOR OPTIMIZING AI PERFORMANCES
Part 2
Game AI Conference, Paris June
A METHOD FOR OPTIMIZING AI PERFORMANCES
Part 2
Game AI Conference, Paris June
Fairness in racing games
Common trick is using simplified (or helped) physics
Fairness in racing games
Common trick is using simplified (or helped) physics
Fairness in racing games
Using (almost) the same player physics
Much better under
Fairness in racing games
Using (almost) the same player physics
Much better under
Speed precalculation
Grip
Radius
F = m*speed^2/radius
MaxSpeed = sqrt(grip*G*radius)
Game AI Conference, Paris June 2010
Speed precalculation
Grip
Radius
F = m*speed^2/radius
MaxSpeed = sqrt(grip*G*radius)
Game AI Conference, Paris June 2010
Speed precalculation
15 m/s (min speed in the turn)
25 m/s
40 m/s
Deceleration
23 m/s
35
Speed precalculation
15 m/s (min speed in the turn)
25 m/s
40 m/s
Deceleration
23 m/s
35
Speed precalculation
You can tweak the precalculation affecting the grip and deceleration
Speed precalculation
You can tweak the precalculation affecting the grip and deceleration
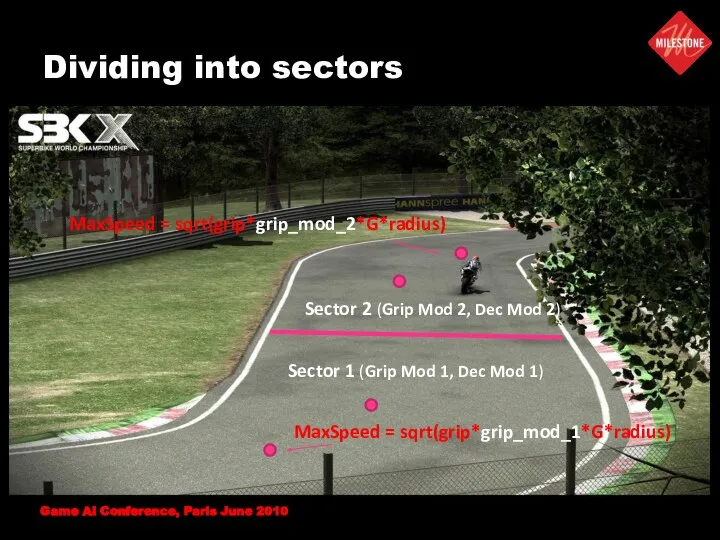
Dividing into sectors
Sector 1 (Grip Mod 1, Dec Mod 1)
Sector 2
Dividing into sectors
Sector 1 (Grip Mod 1, Dec Mod 1)
Sector 2
Iterative method
Detect sectors in an automatic way
Start when inverse radius !=
Iterative method
Detect sectors in an automatic way
Start when inverse radius !=
Iterative method
Increment modifiers as soon as lap time decrease
One lap could
Iterative method
Increment modifiers as soon as lap time decrease
One lap could

Extra conditions
Considering only lap time is often not sufficient
Need extra conditions
Extra conditions
Considering only lap time is often not sufficient
Need extra conditions
Resulting Data
Stored as a track asset
For each sector: start sector info,
Resulting Data
Stored as a track asset
For each sector: start sector info,
Not optimized lap
Game AI Conference, Paris June 2010
Not optimized lap
Game AI Conference, Paris June 2010

Grip modifiers
BestTime = 128.11
Grip Modifier 0 = 1.00
BestTime = 127.76
BestTime =
Grip modifiers
BestTime = 128.11
Grip Modifier 0 = 1.00
BestTime = 127.76
BestTime =
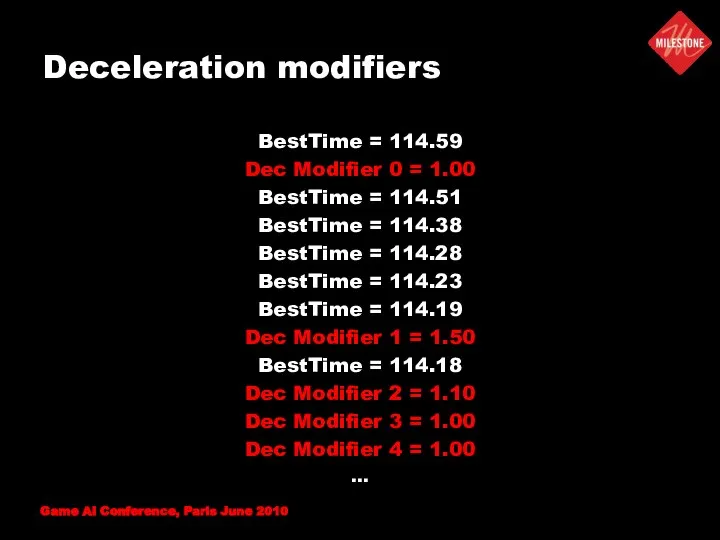
Deceleration modifiers
BestTime = 114.59
Dec Modifier 0 = 1.00
BestTime = 114.51
BestTime =
Deceleration modifiers
BestTime = 114.59
Dec Modifier 0 = 1.00
BestTime = 114.51
BestTime =
Optimized lap (no extra conditions)
Game AI Conference, Paris June 2010
Optimized lap (no extra conditions)
Game AI Conference, Paris June 2010
Adding extra conditions
Example
No out of track
Ideal line distance < 3 meters
Adding extra conditions
Example
No out of track
Ideal line distance < 3 meters
Optimized lap (with extra conditions)
Game AI Conference, Paris June 2010
Optimized lap (with extra conditions)
Game AI Conference, Paris June 2010
Advantages
Simple implementation
Editable results
Speeds are still proportional to the radius
Can tweak by
Advantages
Simple implementation
Editable results
Speeds are still proportional to the radius
Can tweak by
Possible improvements
Step managment
Order optimization
Extra conditions
Acting not only on speeds (driving parameters)
Game
Possible improvements
Step managment
Order optimization
Extra conditions
Acting not only on speeds (driving parameters)
Game
Conclusions
Fairness is very important
Difficult to forecast physics (and track)
Trying and see
Conclusions
Fairness is very important
Difficult to forecast physics (and track)
Trying and see
 Черновая отделка. Группа компаний "Удача"
Черновая отделка. Группа компаний "Удача" Министр здравоохранения ДНР - Долгошапко Ольга Николаевна
Министр здравоохранения ДНР - Долгошапко Ольга Николаевна Ко-Амлесса1
Ко-Амлесса1 ДИАГРАММА ЖЕЛЕЗО-УГЛЕРОД
ДИАГРАММА ЖЕЛЕЗО-УГЛЕРОД Политическая идеология и PR. (Лекция 5)
Политическая идеология и PR. (Лекция 5) Региональная политика
Региональная политика Сравнительный анализ и методика повышения эффективности дистанционных бросков у баскетболистов разной квалификации
Сравнительный анализ и методика повышения эффективности дистанционных бросков у баскетболистов разной квалификации Система ЦТ SECAM
Система ЦТ SECAM ВКР: Технология современной женской стрижки методом свободной руки
ВКР: Технология современной женской стрижки методом свободной руки Работа с понятиями на занятиях в воскресной школе
Работа с понятиями на занятиях в воскресной школе Искусство этрусков
Искусство этрусков Многогранники в искусстве
Многогранники в искусстве Чемпионы рядом с нами
Чемпионы рядом с нами Спорт равных возможностей
Спорт равных возможностей Языки, компиляторы, эмуляторы
Языки, компиляторы, эмуляторы Юрий Гагарин
Юрий Гагарин Программа "Антизомби"
Программа "Антизомби" М. Портер и его роль в развитии теории конкурентоспособности Подготовил: Безнощук Богдан, студент 4 курса, ДС-01
М. Портер и его роль в развитии теории конкурентоспособности Подготовил: Безнощук Богдан, студент 4 курса, ДС-01  Christmas food
Christmas food Презентация "Бизнес-план предприятия" - скачать презентации по Экономике
Презентация "Бизнес-план предприятия" - скачать презентации по Экономике Гражданско-правовая отвественность медицинских работников
Гражданско-правовая отвественность медицинских работников Електронне врядування, інформаційні технології, ресурси та сервіси на державній службі
Електронне врядування, інформаційні технології, ресурси та сервіси на державній службі Відкритий доступ Ірина Кучма менеджерка програми Відкритий доступ eIFL.net На підтримку Архіву електронних матеріалів ТДТУ http://dspace
Відкритий доступ Ірина Кучма менеджерка програми Відкритий доступ eIFL.net На підтримку Архіву електронних матеріалів ТДТУ http://dspace Акции на Одинцовских курганах 2019
Акции на Одинцовских курганах 2019 Негосударственные пенсионные фонды
Негосударственные пенсионные фонды  Презентация "Религиозные сооружения" - скачать презентации по МХК
Презентация "Религиозные сооружения" - скачать презентации по МХК Разработка политики и программ профилактики неинфекционных заболеваний О.Ф.Калев Челябинская государственная медицинская
Разработка политики и программ профилактики неинфекционных заболеваний О.Ф.Калев Челябинская государственная медицинская  Составление тренировочных программ для мужчин различных типов сложения
Составление тренировочных программ для мужчин различных типов сложения