- СИНТЕЗ ЛИНЕЙНЫХ НЕПРЕРЫВНЫХ СИСТЕМ

Содержание
- 2. СОДЕРЖАНИЕ 10.1 Определение коэффициентов обратных связей для синтеза систем регулирования 10.2. Определение параметров модальных регуляторов 10.3.
- 4. Определение коэффициентов обратных связей для синтеза систем регулирования Классически методы синтеза основаны на использовании передаточных функций,
- 5. теорема . Теорема. Задана линейная стационарная располагаемая система с одним входом и одним и одним выходом
- 7. Скачать презентацию
СОДЕРЖАНИЕ
10.1 Определение коэффициентов обратных связей для синтеза систем регулирования
10.2. Определение параметров
СОДЕРЖАНИЕ
10.1 Определение коэффициентов обратных связей для синтеза систем регулирования
10.2. Определение параметров
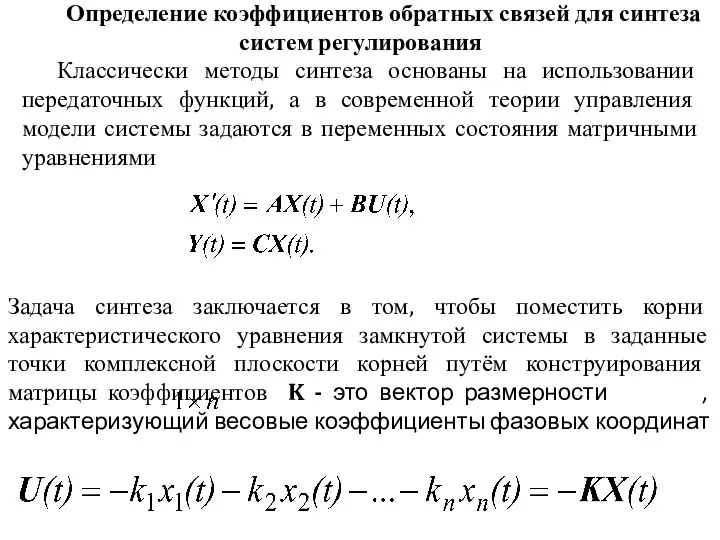
Определение коэффициентов обратных связей для синтеза систем регулирования
Классически методы
Определение коэффициентов обратных связей для синтеза систем регулирования
Классически методы
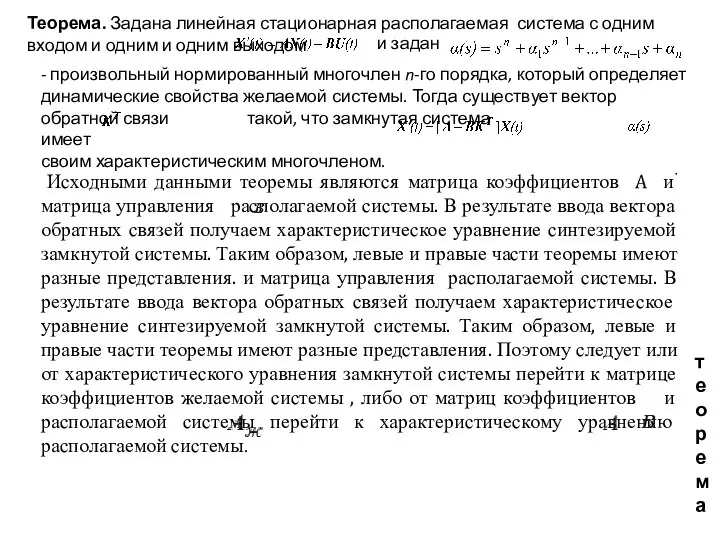
теорема
.
Теорема. Задана линейная стационарная располагаемая система с одним входом и одним
теорема
.
Теорема. Задана линейная стационарная располагаемая система с одним входом и одним
 Plagiarism in Kazakhstan
Plagiarism in Kazakhstan Асфальт 8. Какие машины бывают
Асфальт 8. Какие машины бывают МАРГАРИН презентация
МАРГАРИН презентация Anastasiyas's dåp Åpenbaringsmenighet i Bergen. Den Russisk-ortodoks kirke i Norge (Moskvapatriarkatet) i sammarbeid med Konevetskij kloster av Jomfru Marias fødselsdag. Den Russiske-ortodokse kirke. Russland
Anastasiyas's dåp Åpenbaringsmenighet i Bergen. Den Russisk-ortodoks kirke i Norge (Moskvapatriarkatet) i sammarbeid med Konevetskij kloster av Jomfru Marias fødselsdag. Den Russiske-ortodokse kirke. Russland Экономическое учение Адама Смита Подготовил: студент группы ДЭН-202 Корнеев Алексей
Экономическое учение Адама Смита Подготовил: студент группы ДЭН-202 Корнеев Алексей Водная среда обитания
Водная среда обитания ОКЕАНЫ ЗЕМЛИ
ОКЕАНЫ ЗЕМЛИ  Кус который не любил кусаться - презентация для начальной школы
Кус который не любил кусаться - презентация для начальной школы План-схема перепланировки помещения. Квартира №78
План-схема перепланировки помещения. Квартира №78 Преступления в сфере компьютерной безопасности
Преступления в сфере компьютерной безопасности Антон Павлович Чехов - русский писатель, прозаик, драматург
Антон Павлович Чехов - русский писатель, прозаик, драматург Латинская Америка в 19 веке
Латинская Америка в 19 веке Ұлттық діндер
Ұлттық діндер Спецпредложение для холдинговых структур по созданию энергосбытовой организации
Спецпредложение для холдинговых структур по созданию энергосбытовой организации  Структура программы на языке С++
Структура программы на языке С++ По страницам великой жизни. Л.Н. Толстой – человек, мыслитель, писатель. Интегрированный урок литературы
По страницам великой жизни. Л.Н. Толстой – человек, мыслитель, писатель. Интегрированный урок литературы Программа основных городских мероприятий
Программа основных городских мероприятий Прессовые формовочные машины
Прессовые формовочные машины Немецкие музыканты 19 века
Немецкие музыканты 19 века Разработка вариантов праздников для продвижения бизнеса магазинов и предприятий
Разработка вариантов праздников для продвижения бизнеса магазинов и предприятий Материал подготовила Воронина Марина Михайловна, Материал подготовила Воронина Марина Михайловна, учитель начальных классо
Материал подготовила Воронина Марина Михайловна, Материал подготовила Воронина Марина Михайловна, учитель начальных классо JavaScript
JavaScript  Социальная политика Японии
Социальная политика Японии  Организация методической работы в школе
Организация методической работы в школе Львів – славне місто України
Львів – славне місто України Delphi – язык программирования
Delphi – язык программирования Управление рентабельностью собственного капитала предприятия
Управление рентабельностью собственного капитала предприятия Организационно-правовые основы охраны общественного порядка и борьбы с преступностью в России до образования регулярной полиции
Организационно-правовые основы охраны общественного порядка и борьбы с преступностью в России до образования регулярной полиции