- Система управления вертолета

Содержание
- 2. Тема №16: Системы автоматизированного и автоматического управления Занятие №10: Система управления вертолета.
- 3. Общие сведения об управлении вертолетом, создание управляющих сил и моментов. 2. Автопилот вертолета АП-34Б 3. Принцип
- 4. Вопрос № 1: Общие сведения об управлении вертолетом, создание управляющих сил и моментов.
- 5. Создание управляющих сил и моментов Продольное и поперечное управление вертолетом осуществляется изменением величины и направления вектора
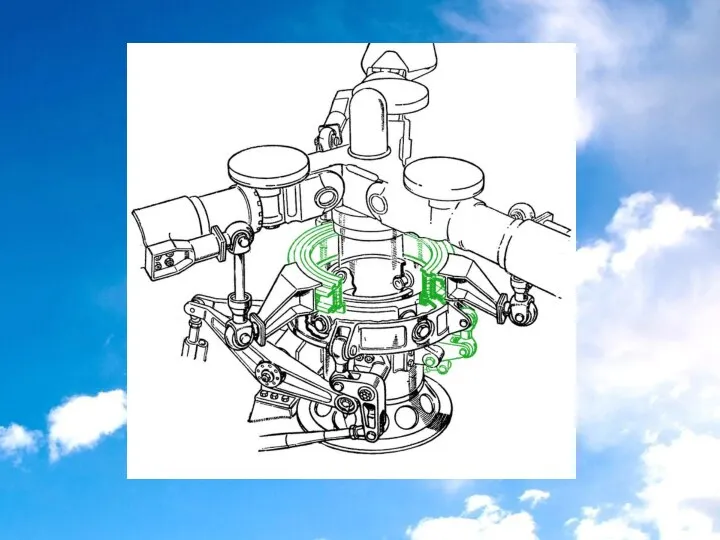
- 6. Органы управления 1- Ручка управления; 2- Рычаг шаг-газ; 3- АП- автомат перекоса; 4- Подача топлива в
- 7. Несущий винт Назначение — создание сил и моментов
- 8. Система продольного управления Управление осуществляется отклонением вектора тяги НВ вперед-назад. Командный рычаг – ручка управления. Проводка
- 10. Система поперечного управления Обеспечивает управления по крену путем отклонения вектора тяги НВ влево, вправо. При этом
- 11. Система объединенного управления «Шаг-Газ» Обеспечивает вертикальное управление вертолетом путем изменения величины вектора тяги НВ. Командный рычаг
- 12. Система путевого управления Обеспечивает управление величиной тяги рулевого винта. Командный рычаг – педали. Проводка управления до
- 13. Основы аэродинамики вертолета Отличие аэродинамики лопасти от крыла заключается в том, что ее сечения обтекаются воздушным
- 14. Критические зоны НВ Зона I обусловлена срывом потока лопасти из-за ее обратного обтекания (с хвостика, а
- 15. Вопрос № 2: Автопилот вертолета АП-34Б Предназначен для улучшения пилотажных характеристик вертолетов различных типов на всех
- 16. Режимы работы АП-34Б: Стабилизация угловых координат по 3-м осям; Стабилизация заданной барометрической высоты; Стабилизация заданной воздушной
- 17. Автопилот АП-34Б Состав АП: Пульт управления; Агрегат управления (вычислительное устройство); Датчики угловых скоростей (ДУС) — 3
- 18. ОТД автопилота АП-35Б
- 19. Вопрос № 3: Принцип работы автопилота АП-34Б.
- 20. Вопрос № 3. Принцип работы автопилота АП-34Б. Основная особенность работы АП-34Б— сохранение замкнутой системы регулирования «вертолет-летчик»
- 21. Вопрос № 4. Назначение, конструкция, принцип работы агрегатов автопилота АП-35Б. (Из техописания)
- 23. Скачать презентацию
Тема №16:
Системы автоматизированного и автоматического управления
Занятие №10:
Система управления вертолета.
Тема №16:
Системы автоматизированного и автоматического управления
Занятие №10:
Система управления вертолета.
Общие сведения об управлении вертолетом,
создание управляющих сил и моментов.
2. Автопилот
Общие сведения об управлении вертолетом,
создание управляющих сил и моментов.
2. Автопилот
Вопрос № 1:
Общие сведения об управлении вертолетом, создание управляющих сил и
Вопрос № 1:
Общие сведения об управлении вертолетом, создание управляющих сил и

Создание управляющих сил и моментов
Продольное и поперечное управление вертолетом осуществляется
Создание управляющих сил и моментов
Продольное и поперечное управление вертолетом осуществляется

Органы управления
1- Ручка управления; 2- Рычаг шаг-газ; 3- АП- автомат перекоса;
Органы управления
1- Ручка управления; 2- Рычаг шаг-газ; 3- АП- автомат перекоса;
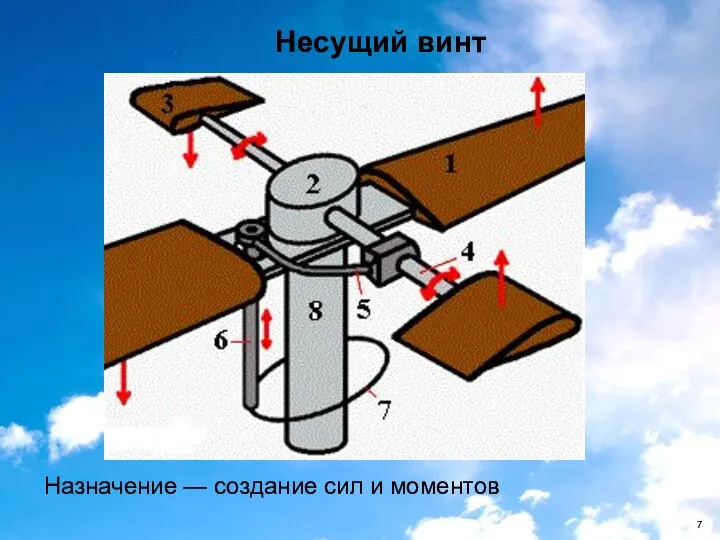
Несущий винт
Назначение — создание сил и моментов
Несущий винт
Назначение — создание сил и моментов

Система продольного управления
Управление осуществляется отклонением вектора тяги НВ вперед-назад.
Командный рычаг
Система продольного управления
Управление осуществляется отклонением вектора тяги НВ вперед-назад.
Командный рычаг

Система поперечного управления
Обеспечивает управления по крену путем отклонения вектора тяги НВ
Система поперечного управления
Обеспечивает управления по крену путем отклонения вектора тяги НВ

Система объединенного управления «Шаг-Газ»
Обеспечивает вертикальное управление вертолетом путем изменения величины
Система объединенного управления «Шаг-Газ»
Обеспечивает вертикальное управление вертолетом путем изменения величины

Система путевого управления
Обеспечивает управление величиной тяги рулевого винта.
Командный рычаг –
Система путевого управления
Обеспечивает управление величиной тяги рулевого винта.
Командный рычаг –

Основы аэродинамики вертолета
Отличие аэродинамики лопасти от крыла заключается в том, что
Основы аэродинамики вертолета
Отличие аэродинамики лопасти от крыла заключается в том, что

Критические зоны НВ
Зона I обусловлена срывом потока лопасти из-за ее обратного
Критические зоны НВ
Зона I обусловлена срывом потока лопасти из-за ее обратного
Вопрос № 2:
Автопилот вертолета АП-34Б
Предназначен для улучшения пилотажных характеристик
Вопрос № 2:
Автопилот вертолета АП-34Б
Предназначен для улучшения пилотажных характеристик
Режимы работы АП-34Б:
Стабилизация угловых координат по 3-м осям;
Стабилизация заданной барометрической высоты;
Стабилизация
Режимы работы АП-34Б:
Стабилизация угловых координат по 3-м осям;
Стабилизация заданной барометрической высоты;
Стабилизация

Автопилот АП-34Б
Состав АП:
Пульт управления;
Агрегат управления (вычислительное устройство);
Датчики угловых скоростей (ДУС) —
Автопилот АП-34Б
Состав АП:
Пульт управления;
Агрегат управления (вычислительное устройство);
Датчики угловых скоростей (ДУС) —
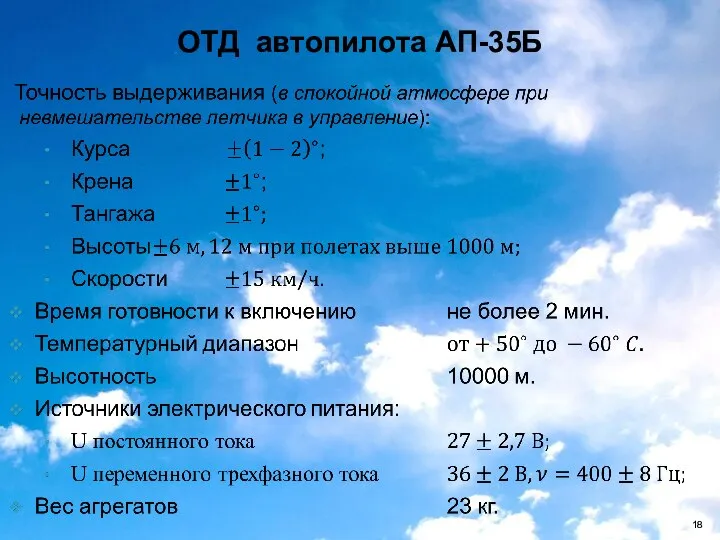
ОТД автопилота АП-35Б
ОТД автопилота АП-35Б
Вопрос № 3:
Принцип работы автопилота АП-34Б.
Вопрос № 3:
Принцип работы автопилота АП-34Б.
Вопрос № 3. Принцип работы автопилота АП-34Б.
Основная особенность работы АП-34Б— сохранение
Вопрос № 3. Принцип работы автопилота АП-34Б.
Основная особенность работы АП-34Б— сохранение

Вопрос № 4.
Назначение, конструкция, принцип работы агрегатов автопилота АП-35Б.
(Из техописания)
Вопрос № 4.
Назначение, конструкция, принцип работы агрегатов автопилота АП-35Б.
(Из техописания)
 ПРОЕКТИРОВАНИЕ СЕТЕЙ ОБЩИЕ ПОЛОЖЕНИЯ
ПРОЕКТИРОВАНИЕ СЕТЕЙ ОБЩИЕ ПОЛОЖЕНИЯ Благоустройство пешеходной зоны (лыжной трассы) на территории дендропарка лесоводов Кировской области
Благоустройство пешеходной зоны (лыжной трассы) на территории дендропарка лесоводов Кировской области Национальная политика в современной России
Национальная политика в современной России Структурная геология Разрывные нарушения
Структурная геология Разрывные нарушения Третьяковская галерея в Лаврушинском переулке
Третьяковская галерея в Лаврушинском переулке Нахождение числа по его дроби 6 класс
Нахождение числа по его дроби 6 класс  Закріплення звука ДЖ, буквосполучення ДЖ
Закріплення звука ДЖ, буквосполучення ДЖ Теплоизоляционные материалы
Теплоизоляционные материалы Структури. Описання шаблона структури
Структури. Описання шаблона структури Техническое обслуживание и ремонт тормозной системы ВАЗ 2105
Техническое обслуживание и ремонт тормозной системы ВАЗ 2105 Срок жизни растений - презентация для начальной школы
Срок жизни растений - презентация для начальной школы Курс ФОДК Тема 4. Финансы и финансовая система Наумова Т. С., доцент, к.э.н.
Курс ФОДК Тема 4. Финансы и финансовая система Наумова Т. С., доцент, к.э.н.  Иммунитет
Иммунитет  Презентация "Великие композиторы мира" - скачать презентации по МХК
Презентация "Великие композиторы мира" - скачать презентации по МХК Команда Юник. Start Up
Команда Юник. Start Up ЭВОЛЮЦИОННАЯ ТЕОРИЯ ДАРВИНА
ЭВОЛЮЦИОННАЯ ТЕОРИЯ ДАРВИНА Фабула или краткий пересказ содержания. Жак Лурселль. Авторская энциклопедия фильмов
Фабула или краткий пересказ содержания. Жак Лурселль. Авторская энциклопедия фильмов Статические методы
Статические методы Мировая художественная культура
Мировая художественная культура Методика обучения баскетболу в школе
Методика обучения баскетболу в школе КАК НЕ ПОПАСТЬ ПОД ДУРНОЕ ВЛИЯНИЕ ?
КАК НЕ ПОПАСТЬ ПОД ДУРНОЕ ВЛИЯНИЕ ?  Мозаика - разновидность монументальной живописи. 6 класс
Мозаика - разновидность монументальной живописи. 6 класс Лекция 4. Генетика бактерий
Лекция 4. Генетика бактерий Технология OAuth
Технология OAuth Влияние вредных примесей на свойства стали
Влияние вредных примесей на свойства стали Презентация "Творческая деятельность" - скачать презентации по МХК
Презентация "Творческая деятельность" - скачать презентации по МХК Солнце, Месяц и Ворон-Воронович - презентация для начальной школы
Солнце, Месяц и Ворон-Воронович - презентация для начальной школы Bedeutungsmotivation
Bedeutungsmotivation