- Теория принятия решений в научно-исследовательской работе

Содержание
- 2. Содержание: Основные понятия 3 Задача линейного программирования 11 Задачи принятия решений, связанные с оптимизацией на графах
- 3. Теория принятия решений (ТПР) – это совокупность методов и моделей, предназначенных для обоснования решений, принимаемых на
- 4. Решение – это любой выбор параметров, зависящих от лица, принимающего решение. Элементы решения – это параметры,
- 5. Решение называется допустимым, если оно удовлетворяет ограничениям: ресурсным, юридическим, правовым, морально-этическим. Решение является оптимальным, если по
- 6. Основные этапы решения задач ТПР. 1. Постановка задачи (приведение входных данных к виду, удобному для построения
- 7. Схема решения задачи методами теории принятия решений выглядит следующим образом Основные понятия #
- 8. Классификация задач ТПР. 1. Решения принимаются в условиях определенности. Каждому решению можно поставить в соответствие (пусть
- 9. 2. Решения принимаются в условиях риска. Между решениями и результатами имеет место стохастическая связь: определенному решению
- 10. 3. Решения принимаются в условиях неопределенности. Определенному решению соответствует более одного результата, а вероятностные характеристики результатов
- 11. Программирование – нахождение экстремума (max или min) функции при заданных ограничениях, т.е. нахождение оптимального решения функции
- 12. Пусть имеется n переменных x1, x2, …, xn. Необходимо найти такие значения этих переменных, чтобы достигался
- 13. Для конкретной задачи система ограничений может содержать любой из знаков неравенства. Но переменные x1, x2, …,
- 14. Стандартной задачей линейного программирования называется задача, система ограничений в которой состоит только из одних неравенств и
- 15. Канонической задачей линейного программирования называется задача, которая состоит в определении максимального (минимального) значения функции цели и
- 16. Пример Составить математическую модель задачи. Имеется два вида корма «№1» и «№2», содержащие питательные вещества: белки,
- 17. Необходимо составить дневной рацион, имеющий минимальную стоимость, в котором содержание каждого вида питательных веществ было бы
- 18. Решение. Пусть x1 и x2 – количество кормов «№1» и «№2». Тогда условия – ограничения для
- 19. Поэтому: условие - ограничение для белков имеет вид: 3x1 + 1x2 ≥ 9, условие – ограничение
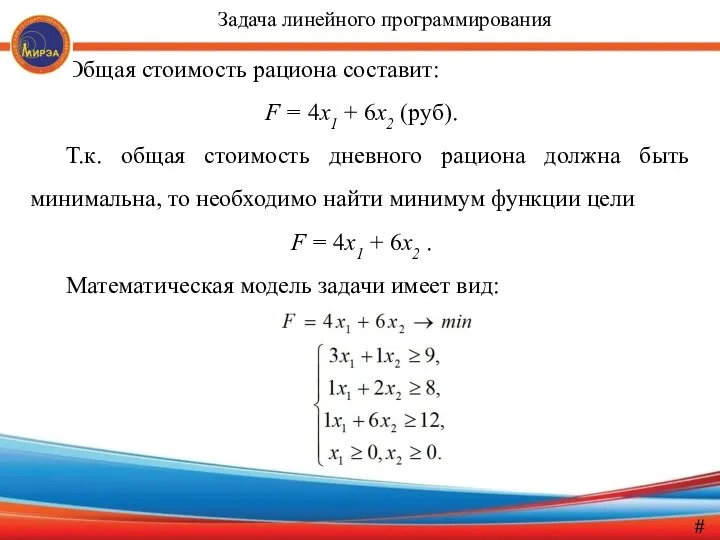
- 20. Общая стоимость рациона составит: F = 4x1 + 6x2 (руб). Т.к. общая стоимость дневного рациона должна
- 21. Задача линейного программирования сформулирована как задача минимизации или максимизации линейной формы, переменные которой связаны некоторой системой
- 22. Алгоритм Шаг 1. В системе ограничений ЗЛП заменить знаки неравенств на знаки точных равенств и построить
- 23. Если неравенство истинное, то надо заштриховать полуплоскость, содержащую данную точку; иначе (неравенство ложное) надо заштриховать полуплоскость,
- 24. Шаг 3. Определить ОДР как часть плоскости, принадлежащую одновременно всем разрешенным областям, и выделить ее. При
- 25. Шаг 6. При поиске максимума целевой функции необходимо передвигать целевую прямую в направлении вектора С, при
- 26. Шаг 7. Определить координаты точки max (min) целевой функции X* = (x1*; x2*) и вычислить значение
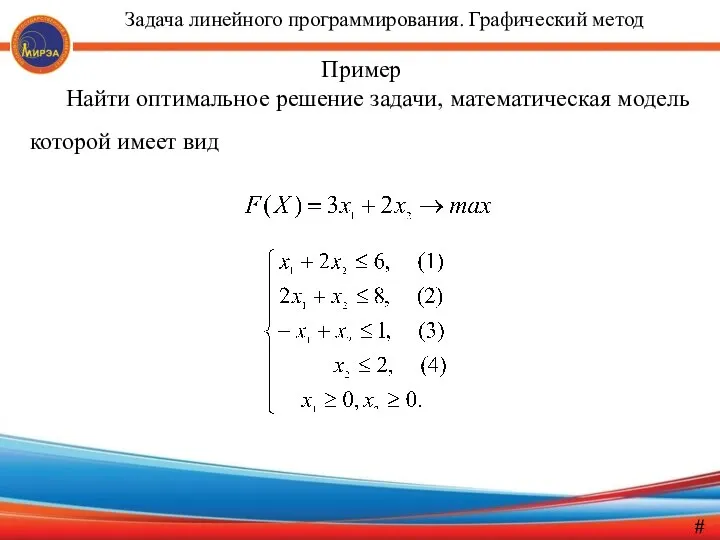
- 27. Пример Найти оптимальное решение задачи, математическая модель которой имеет вид # Задача линейного программирования. Графический метод
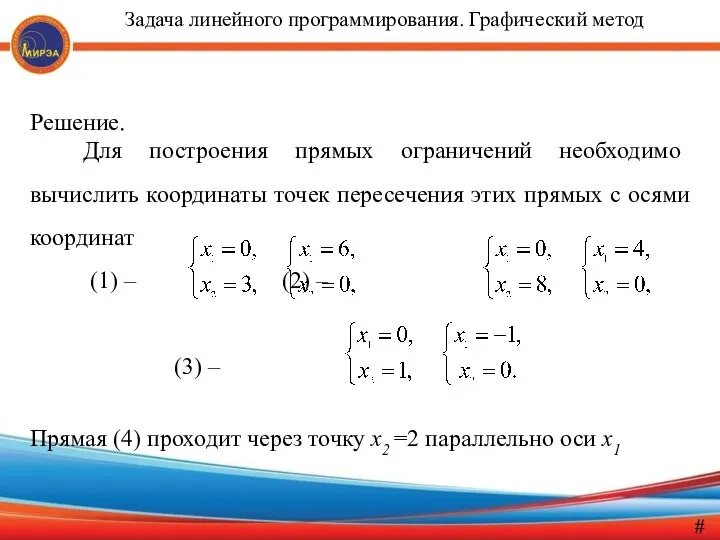
- 28. Решение. Для построения прямых ограничений необходимо вычислить координаты точек пересечения этих прямых с осями координат (1)
- 29. Графическое решение примера # Задача линейного программирования. Графический метод
- 30. Далее следует определить ОДР. Например, подставив точку (0;0) в исходное ограничение (3), результатом является неравенство ,
- 31. Целевую прямую можно построить по уравнению 3x1 + 2x2 = 6 Вектор строится из точки (0;0)
- 32. Координаты точки Е определяются из системы уравнений прямых ограничений (1) и (2) Максимальное значение целевой функции
- 33. Среди графовых моделей особую роль играют потоковые модели, часто называемые транспортными сетями только из-за того, что
- 34. Графом называется пара объектов, состоящая из множества точек и отрезков, соединяющих некоторые из этих точек. Эти
- 35. Пусть: G – граф; X1, X2,…, Xn – вершины графа; uij – дуга, соединяющая вершину Xi
- 36. Путь в ориентированном графе – это последовательность дуг, в которой конец предыдущей дуги совпадает с началом
- 37. Задача о максимальном потоке в сети Рассматривается ориентированный граф с (n+1) вершинами X0, X1, X2,…, Xn,
- 38. Пропускная способность cij дуги (Xi, Xj) определяет максимальное количество вещества, которое может пропустить эта дуга за
- 39. Из (1) следует – поток по любой дуге неотрицателен и не превышает пропускной способности дуги. Из
- 40. Задача о максимальном потоке в сети представляет собой задачу ЛП: среди всех решений системы линейных ограничений
- 41. Дуга uij с началом в Xi и концом в вершине Xj является насыщенной, если zij=cij, т.
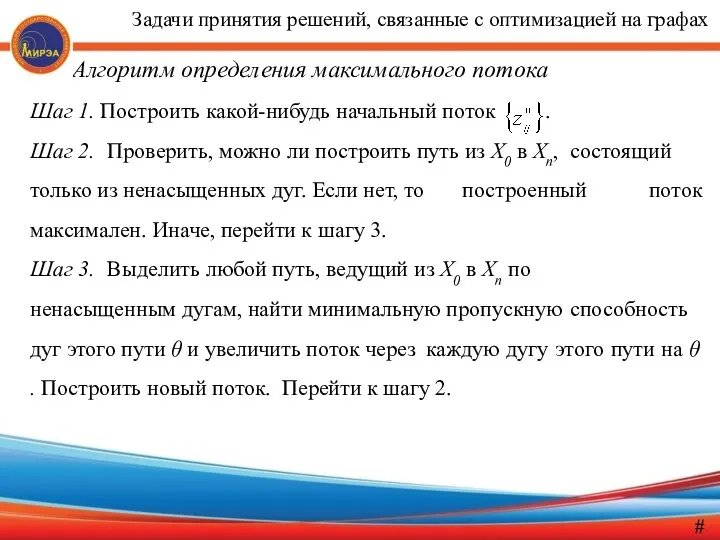
- 42. Алгоритм определения максимального потока Шаг 1. Построить какой-нибудь начальный поток . Шаг 2. Проверить, можно ли
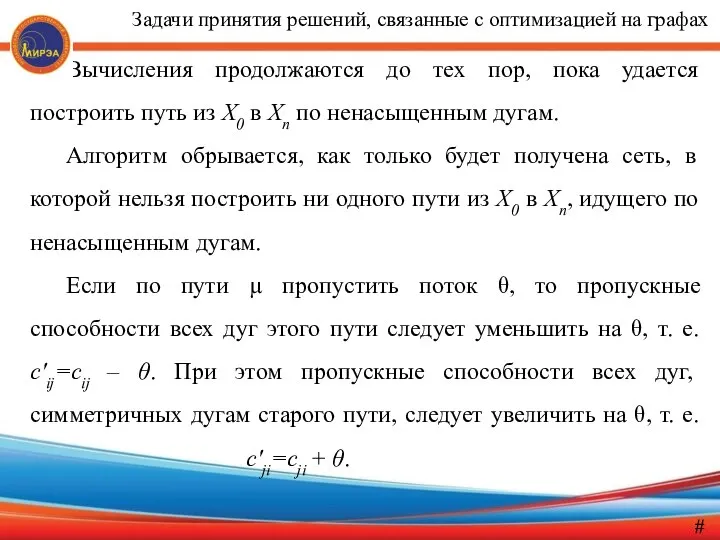
- 43. Вычисления продолжаются до тех пор, пока удается построить путь из X0 в Xn по ненасыщенным дугам.
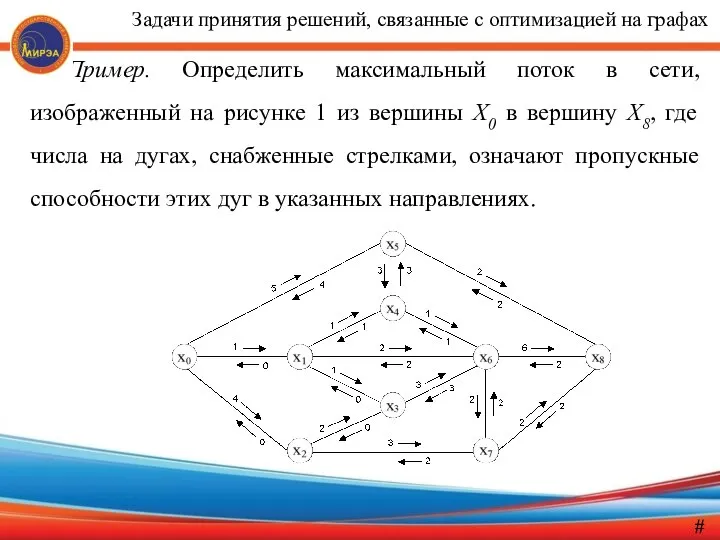
- 44. Пример. Определить максимальный поток в сети, изображенный на рисунке 1 из вершины X0 в вершину X8,
- 45. Решение. В качестве начального взять нулевой поток, когда все zij = 0. Найти какой-нибудь путь из
- 46. Пропускные способности дуг пути уменьшаются на 2 единицы: , , т. е. дуга (X5, X8) становится
- 47. Сеть с новыми пропускными способностями дуг приведена на рисунке 2. # Задачи принятия решений, связанные с
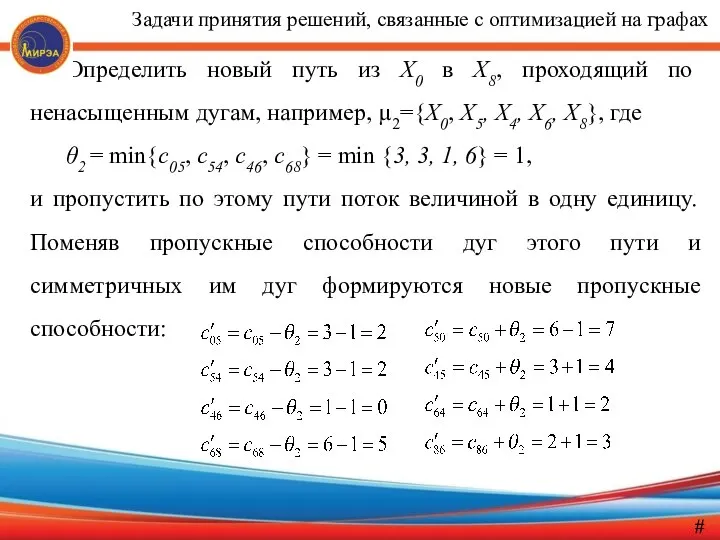
- 48. Определить новый путь из X0 в X8, проходящий по ненасыщенным дугам, например, µ2={X0, X5, X4, X6,
- 49. Дуга (X4, X6) становится насыщенной. Сеть с измененными пропускными способностями приведена на рисунке 3. # Задачи
- 50. Далее последовательно найти пути µ3, µ4, µ5, µ6 и по ним пропустить потоки величиной θ3, θ4,
- 51. µ4={ X0, X1, X6, X8}, θ4 = min {1, 1, 4} = 1 # Задачи принятия
- 52. µ5={ X0, X2, X7, X8}, θ5 = min {4, 3, 2} = 2 # Задачи принятия
- 53. µ6={ X0, X2, X3, X6, X8}, θ6 = min {2, 2, 3, 3} = 2 #
- 54. Чтобы определить максимальный поток, следует вычесть из пропускных способностей дуг исходной сети измененные пропускные способности тех
- 55. Положительные значения найденных разностей дают величины zij потоков по соответствующим дугам (Xi, Xj) в максимальном потоке
- 56. Числа, стоящие у каждой дуги, показывают величину потока по данной дуге, а стрелки – направление потока
- 57. Пусть имеется игра, в которой участвуют два игрока, причем каждый из игроков имеет конечное число стратегий.
- 58. Значения aij выигрыша при каждой паре стратегий (в каждой ситуации) {Ai, Вj}, i=1,2,… ,т, j =
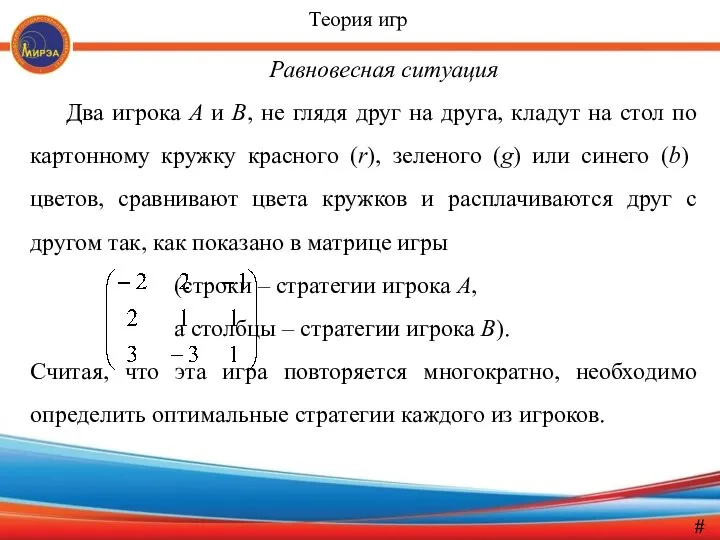
- 59. Равновесная ситуация Два игрока А и В, не глядя друг на друга, кладут на стол по
- 60. Анализ стратегии игрока А. Выбирая стратегию игрока А необходимо принимать в расчет ответную стратегию игрока В,
- 61. Минимальные выигрыши записаны в правом столбце таблицы Maxmin. Игрок А останавливает свой выбор на стратегии Ag,
- 62. Если игрок А будет придерживаться этой стратегии, то ему гарантирован выигрыш, не меньший 1, при любом
- 63. Выбирая свою стратегию, игрок В должен учитывать, что при этом стратегией его противника А может оказаться
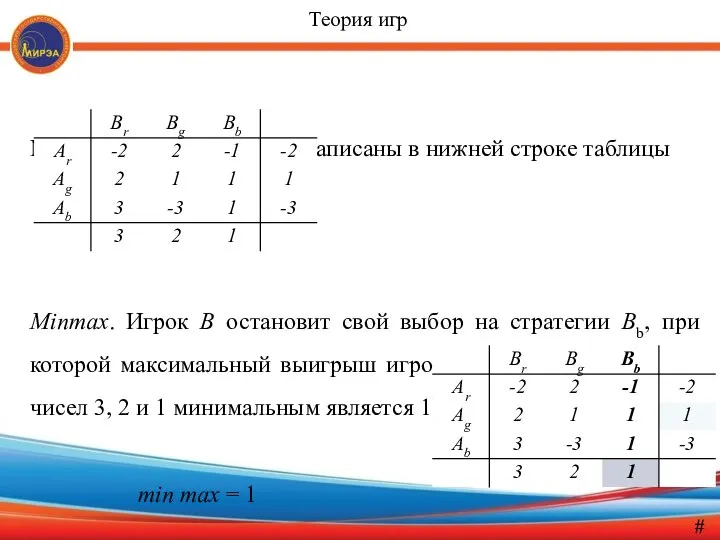
- 64. Максимальные выигрыши записаны в нижней строке таблицы Minmax. Игрок В остановит свой выбор на стратегии Вb,
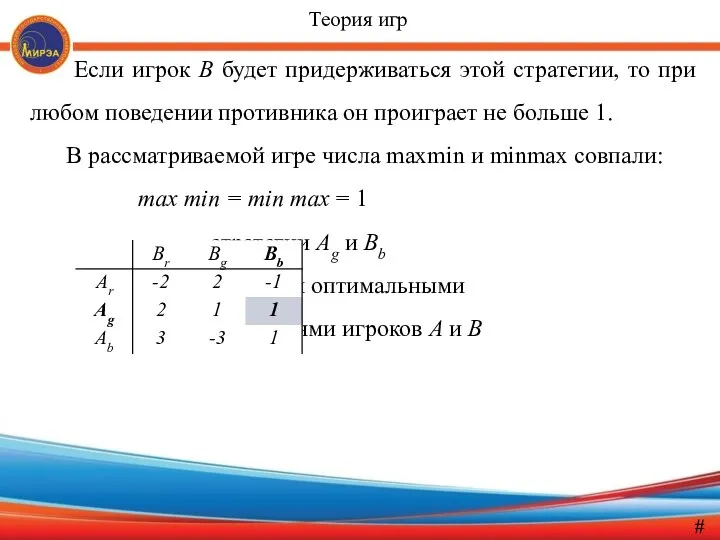
- 65. Если игрок В будет придерживаться этой стратегии, то при любом поведении противника он проиграет не больше
- 66. В общем виде: Число α называется нижней ценой игры. Число β называется верхней ценой игры. Если
- 67. Цена игры совпадает с элементом aij матрицы игры А, расположенным на пересечении i-й строки (стратегия Ai
- 68. Смешанные стратегии Пусть имеется произвольная т×п игра, заданная т×п –матрицей Т.к. игрок А имеет т чистых
- 69. Смешанная стратегия второго игрока В, имеющего п чистых стратегий, описывается набором п неотрицательных чисел сумма которых
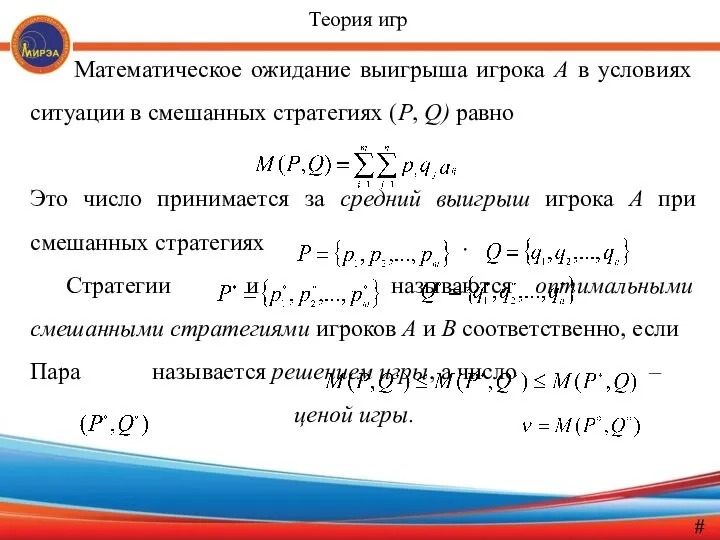
- 70. Математическое ожидание выигрыша игрока А в условиях ситуации в смешанных стратегиях (P, Q) равно Это число
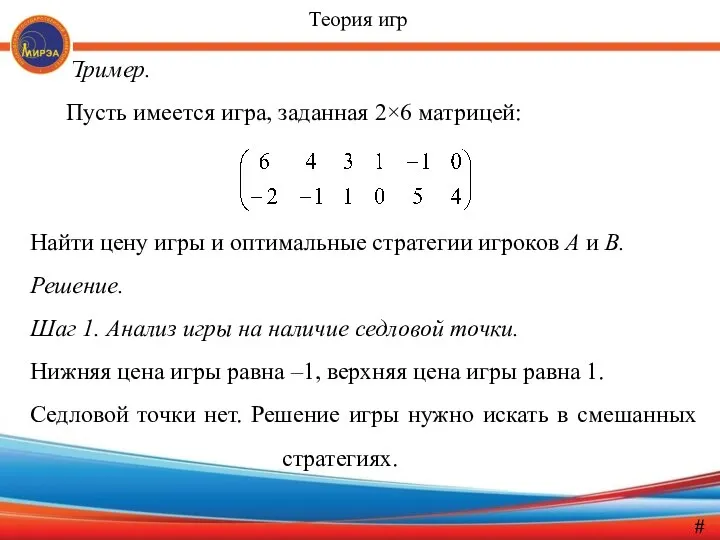
- 71. Пример. Пусть имеется игра, заданная 2×6 матрицей: Найти цену игры и оптимальные стратегии игроков А и
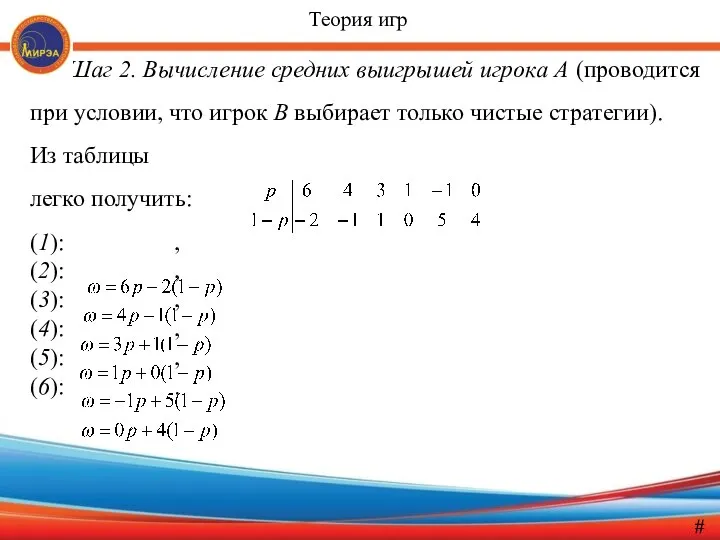
- 72. Шаг 2. Вычисление средних выигрышей игрока А (проводится при условии, что игрок В выбирает только чистые
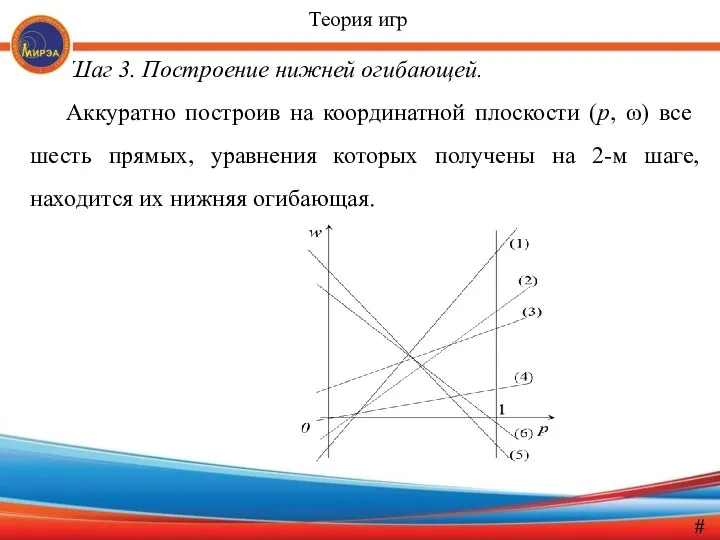
- 73. Шаг 3. Построение нижней огибающей. Аккуратно построив на координатной плоскости (р, ω) все шесть прямых, уравнения
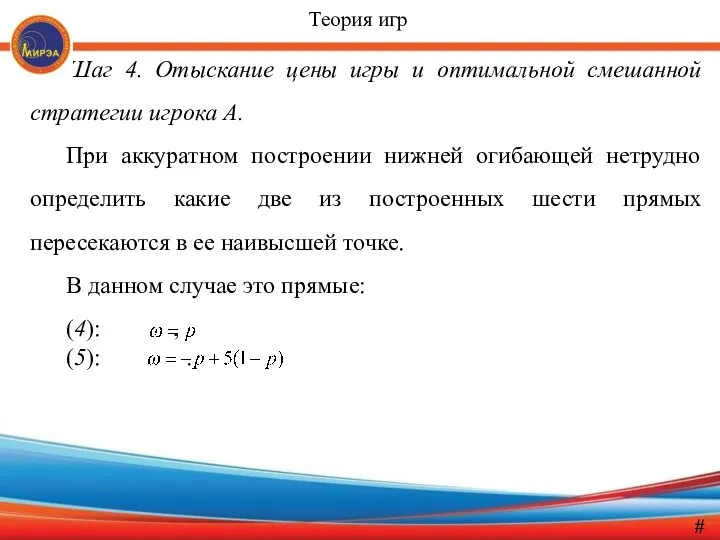
- 74. Шаг 4. Отыскание цены игры и оптимальной смешанной стратегии игрока А. При аккуратном построении нижней огибающей
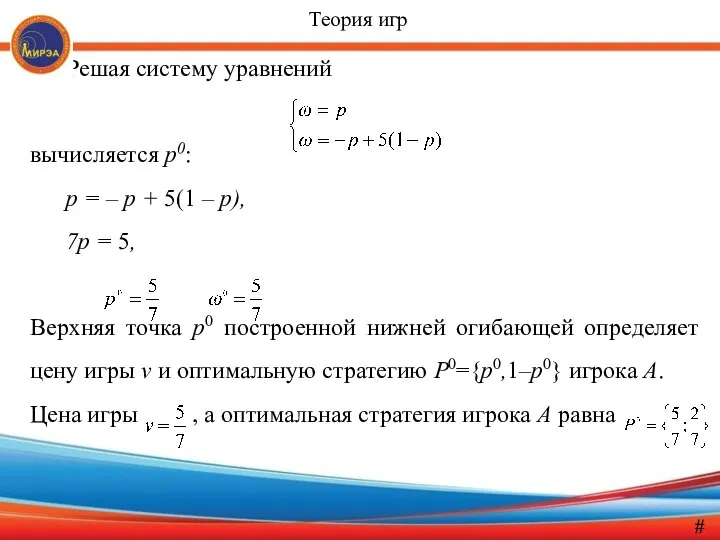
- 75. Решая систему уравнений вычисляется р0: р = – р + 5(1 – р), 7р = 5,
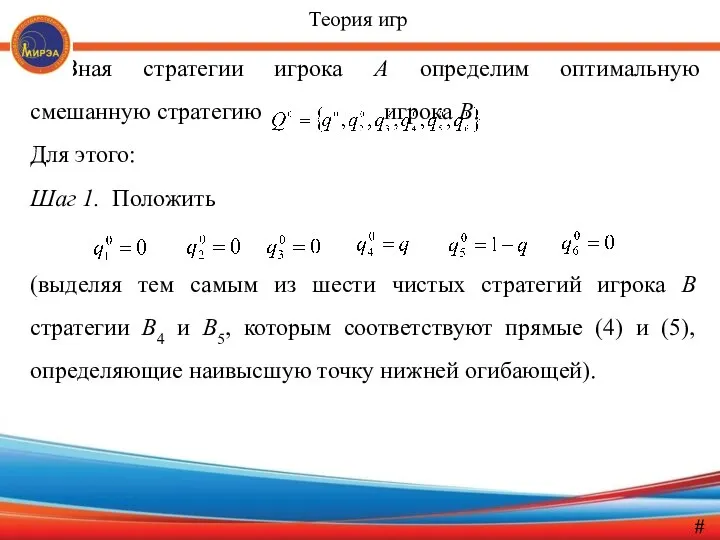
- 76. Зная стратегии игрока А определим оптимальную смешанную стратегию игрока B. Для этого: Шаг 1. Положить (выделяя
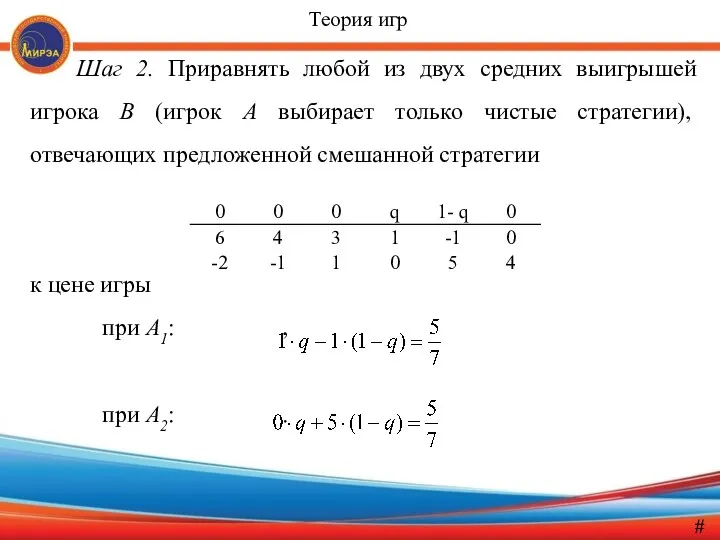
- 77. Шаг 2. Приравнять любой из двух средних выигрышей игрока В (игрок А выбирает только чистые стратегии),
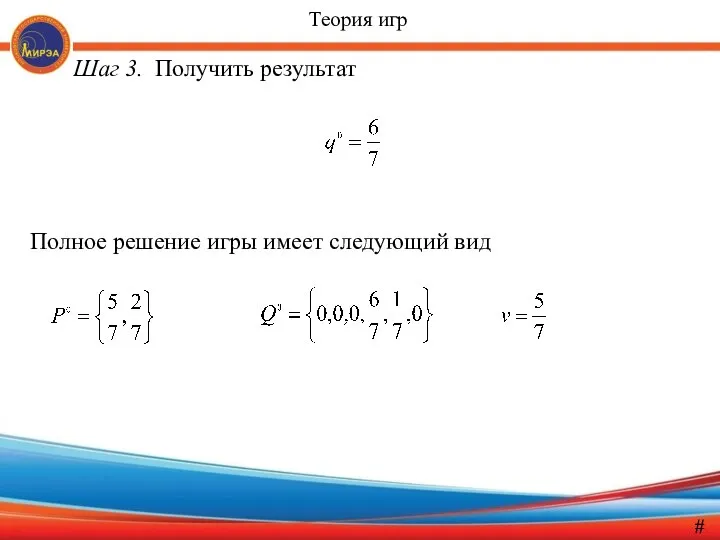
- 78. Шаг 3. Получить результат Полное решение игры имеет следующий вид # Теория игр
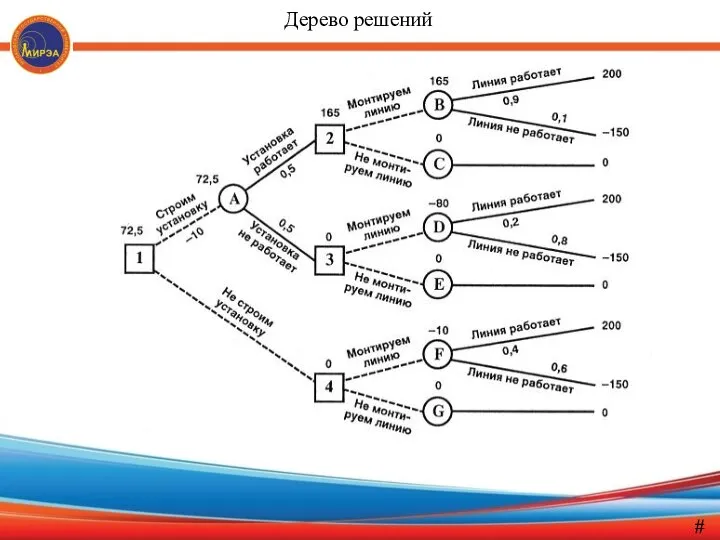
- 79. Дерево решений — это графическое изображение процесса принятия решений, в котором отражены альтернативные решения, альтернативные состояния
- 80. Дерево решений состоит из узлов и ветвей. Располагаются деревья слева направо. Узлы дерева бывают двух видов:
- 81. Когда все решения и их исходы указаны на дереве, просчитывается каждый из вариантов, и в конце
- 82. Пример. Главному инженеру компании надо решить, монтировать или нет новую производственную линию (ПЛ), использующую новейшую технологию.
- 83. Эксперимент обойдется в 10 млн. рублей. Главный инженер считает, что существует 50% шансов, что экспериментальная установка
- 84. # Дерево решений
- 85. Решение. В узле F возможны исходы «линия работает» с вероятностью 0,4 (что приносит прибыль 200) и
- 86. В узле 4 необходимо выбрать между решениями: 1) «монтируем линию» (оценка этого решения EMV( F) =
- 87. Аналогично оцениваются узлы B, C, 2, D, E, 3, A: EMV( B) = 0,9 ∙ 200
- 88. EMV(D) = 0,2 ∙ 200 + 0,8 ∙ (-150) = 40 – 120 = -80. EMV(
- 89. Ответ. Экспериментальную установку строить следует. Если установка работает, то монтируем линию. Если установка не работает, то
- 91. Скачать презентацию
Содержание:
Основные понятия 3
Задача линейного программирования 11
Задачи принятия решений, связанные с
оптимизацией
Содержание:
Основные понятия 3
Задача линейного программирования 11
Задачи принятия решений, связанные с
оптимизацией
Теория принятия решений (ТПР) – это совокупность методов и моделей, предназначенных
Решение – это любой выбор параметров, зависящих от лица, принимающего решение.
Элементы
Элементы
Решение называется допустимым, если оно удовлетворяет ограничениям: ресурсным, юридическим, правовым, морально-этическим.
Решение
Решение
Основные этапы решения задач ТПР.
1. Постановка задачи (приведение входных данных к
1. Постановка задачи (приведение входных данных к
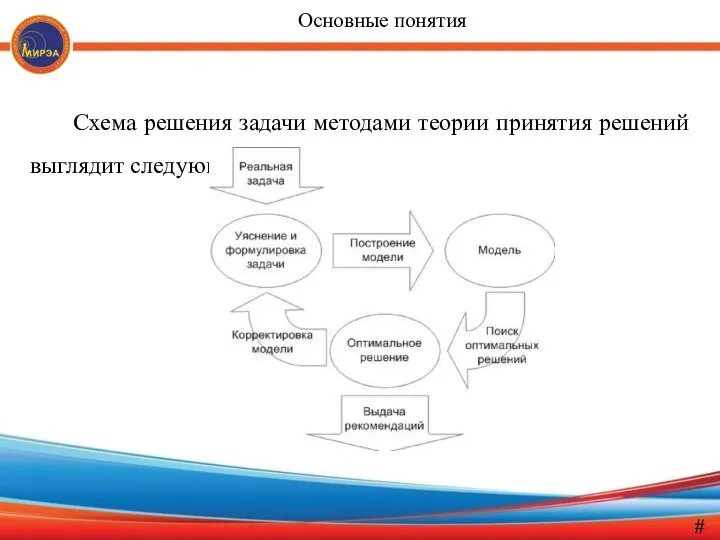
Схема решения задачи методами теории принятия решений выглядит следующим образом
Основные
Основные
Классификация задач ТПР.
1. Решения принимаются в условиях определенности.
Каждому решению можно поставить
1. Решения принимаются в условиях определенности.
Каждому решению можно поставить
2. Решения принимаются в условиях риска.
Между решениями и результатами имеет
Между решениями и результатами имеет
3. Решения принимаются в условиях неопределенности.
Определенному решению соответствует более одного результата,
Определенному решению соответствует более одного результата,
Программирование – нахождение экстремума (max или min) функции при заданных ограничениях,
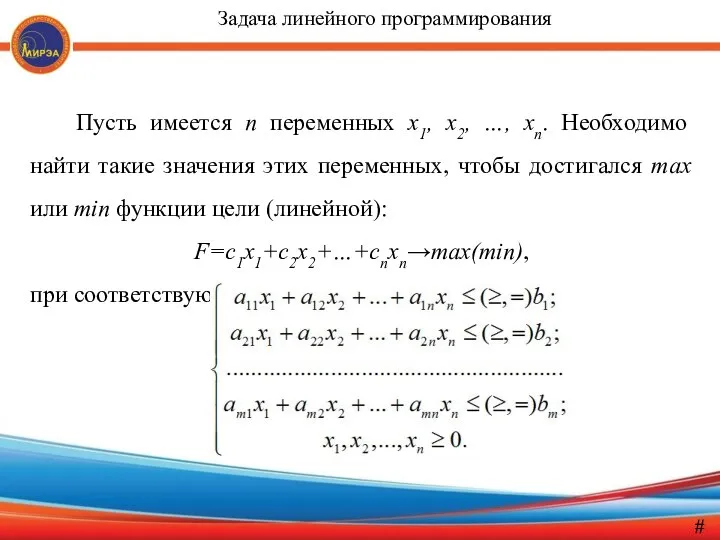
Пусть имеется n переменных x1, x2, …, xn. Необходимо найти такие
Для конкретной задачи система ограничений может содержать любой из знаков неравенства.
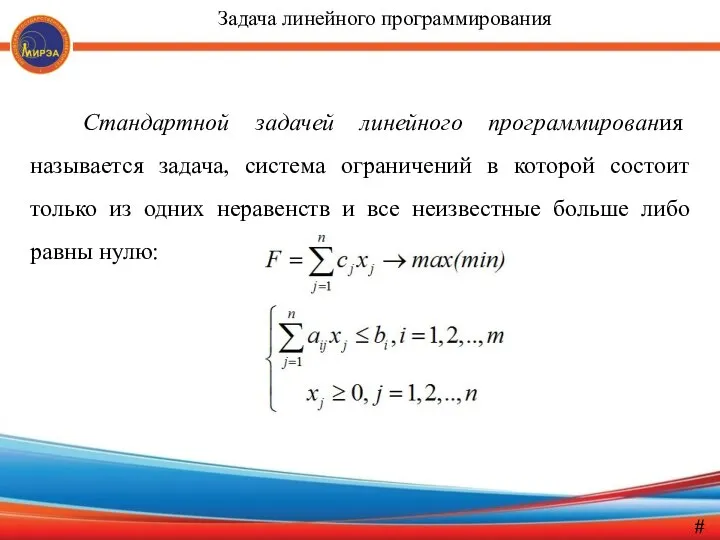
Стандартной задачей линейного программирования называется задача, система ограничений в которой состоит
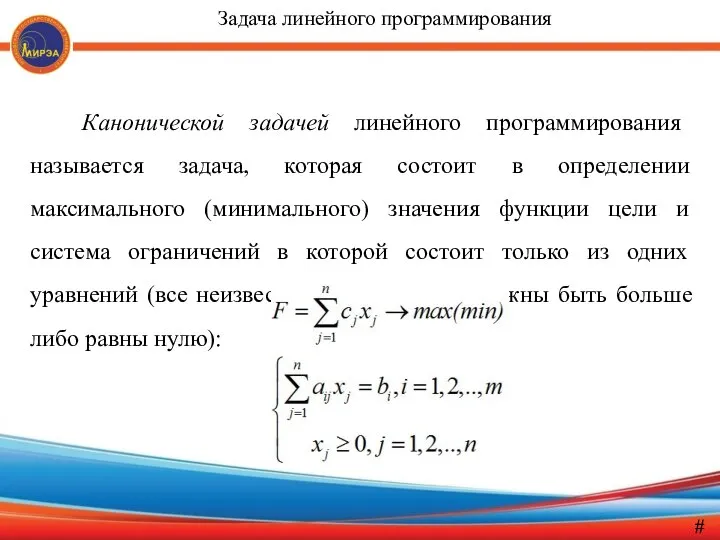
Канонической задачей линейного программирования называется задача, которая состоит в определении максимального
Пример
Составить математическую модель задачи.
Имеется два вида корма «№1» и «№2», содержащие
Составить математическую модель задачи.
Имеется два вида корма «№1» и «№2», содержащие
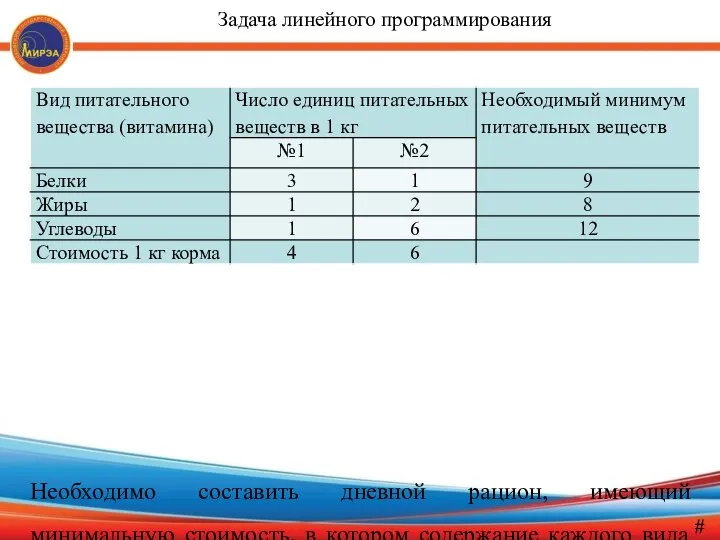
Необходимо составить дневной рацион, имеющий минимальную стоимость, в котором содержание каждого
Необходимо составить дневной рацион, имеющий минимальную стоимость, в котором содержание каждого
Решение.
Пусть x1 и x2 – количество кормов «№1» и «№2».
Тогда условия
Пусть x1 и x2 – количество кормов «№1» и «№2».
Тогда условия
Поэтому:
условие - ограничение для белков имеет вид:
3x1 + 1x2 ≥ 9,
условие
условие - ограничение для белков имеет вид:
3x1 + 1x2 ≥ 9,
условие
Общая стоимость рациона составит:
F = 4x1 + 6x2 (руб).
Т.к. общая стоимость
Общая стоимость рациона составит:
F = 4x1 + 6x2 (руб).
Т.к. общая стоимость
Задача линейного программирования сформулирована как задача минимизации или максимизации линейной формы,
Задача линейного программирования сформулирована как задача минимизации или максимизации линейной формы,
Алгоритм
Шаг 1. В системе ограничений ЗЛП заменить знаки неравенств на знаки точных
Алгоритм
Шаг 1. В системе ограничений ЗЛП заменить знаки неравенств на знаки точных
Если неравенство истинное, то надо заштриховать полуплоскость, содержащую данную точку;
иначе (неравенство ложное) надо заштриховать
Если неравенство истинное, то надо заштриховать полуплоскость, содержащую данную точку;
иначе (неравенство ложное) надо заштриховать
Шаг 3. Определить ОДР как часть плоскости, принадлежащую одновременно всем разрешенным областям,
Шаг 3. Определить ОДР как часть плоскости, принадлежащую одновременно всем разрешенным областям,
Шаг 6. При поиске максимума целевой функции необходимо передвигать целевую прямую в
Шаг 6. При поиске максимума целевой функции необходимо передвигать целевую прямую в
Шаг 7. Определить координаты точки max (min) целевой функции X* = (x1*;
Шаг 7. Определить координаты точки max (min) целевой функции X* = (x1*;
Пример
Найти оптимальное решение задачи, математическая модель которой имеет вид
#
Задача
Пример
Найти оптимальное решение задачи, математическая модель которой имеет вид
#
Задача
Решение.
Для построения прямых ограничений необходимо вычислить координаты точек пересечения этих
Для построения прямых ограничений необходимо вычислить координаты точек пересечения этих
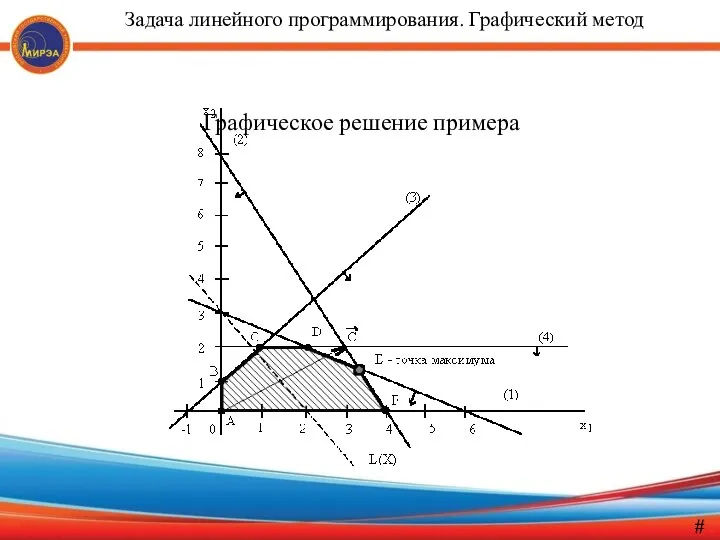
Графическое решение примера
#
Задача линейного программирования. Графический метод
#
Задача линейного программирования. Графический метод
Далее следует определить ОДР. Например, подставив точку (0;0) в исходное ограничение
Целевую прямую можно построить по уравнению
3x1 + 2x2 = 6
Вектор строится
Целевую прямую можно построить по уравнению
3x1 + 2x2 = 6
Вектор строится
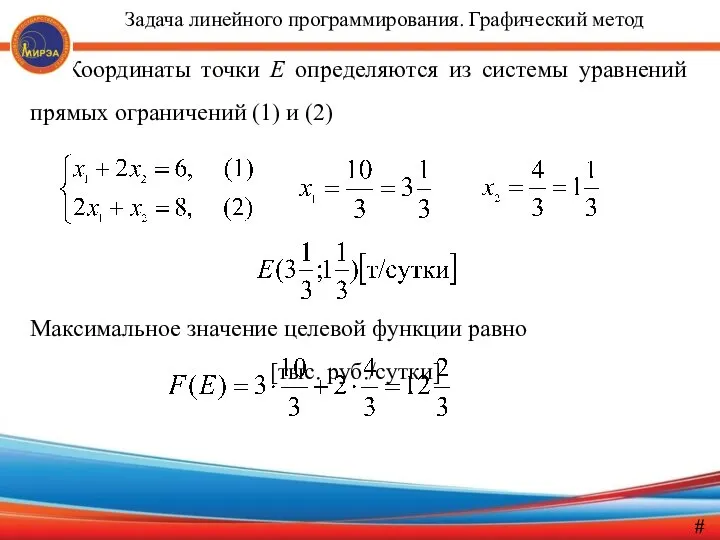
Координаты точки Е определяются из системы уравнений прямых ограничений (1) и
Координаты точки Е определяются из системы уравнений прямых ограничений (1) и
Среди графовых моделей особую роль играют потоковые модели, часто называемые
Среди графовых моделей особую роль играют потоковые модели, часто называемые
Графом называется пара объектов, состоящая из множества точек и отрезков,
Графом называется пара объектов, состоящая из множества точек и отрезков,
Пусть:
G – граф;
X1, X2,…, Xn – вершины графа;
uij – дуга,
Пусть:
G – граф;
X1, X2,…, Xn – вершины графа;
uij – дуга,
Путь в ориентированном графе – это последовательность дуг, в которой
Путь в ориентированном графе – это последовательность дуг, в которой
Задача о максимальном потоке в сети
Рассматривается ориентированный граф с (n+1)
Задача о максимальном потоке в сети
Рассматривается ориентированный граф с (n+1)
Пропускная способность cij дуги (Xi, Xj) определяет максимальное количество вещества,
Пропускная способность cij дуги (Xi, Xj) определяет максимальное количество вещества,
Из (1) следует – поток по любой дуге неотрицателен и
Из (1) следует – поток по любой дуге неотрицателен и
Задача о максимальном потоке в сети представляет собой задачу ЛП:
Задача о максимальном потоке в сети представляет собой задачу ЛП:
Дуга uij с началом в Xi и концом в вершине
Дуга uij с началом в Xi и концом в вершине
Алгоритм определения максимального потока
Шаг 1. Построить какой-нибудь начальный поток .
Шаг
Алгоритм определения максимального потока
Шаг 1. Построить какой-нибудь начальный поток .
Шаг
Вычисления продолжаются до тех пор, пока удается построить путь из X0
Вычисления продолжаются до тех пор, пока удается построить путь из X0
Пример. Определить максимальный поток в сети, изображенный на рисунке 1 из
Пример. Определить максимальный поток в сети, изображенный на рисунке 1 из
Решение.
В качестве начального взять нулевой поток, когда все zij =
Решение.
В качестве начального взять нулевой поток, когда все zij =
Пропускные способности дуг пути уменьшаются на 2 единицы:
, ,
т. е.
Пропускные способности дуг пути уменьшаются на 2 единицы:
, ,
т. е.
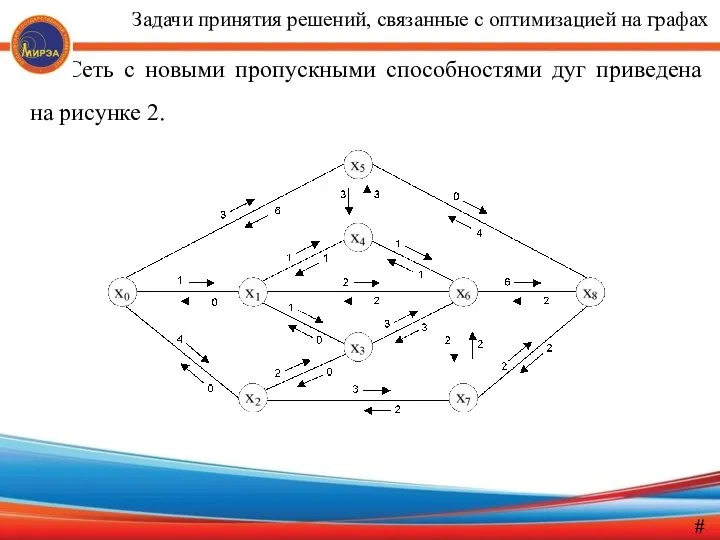
Сеть с новыми пропускными способностями дуг приведена на рисунке 2.
#
Задачи
Сеть с новыми пропускными способностями дуг приведена на рисунке 2.
#
Задачи
Определить новый путь из X0 в X8, проходящий по ненасыщенным дугам,
Определить новый путь из X0 в X8, проходящий по ненасыщенным дугам,
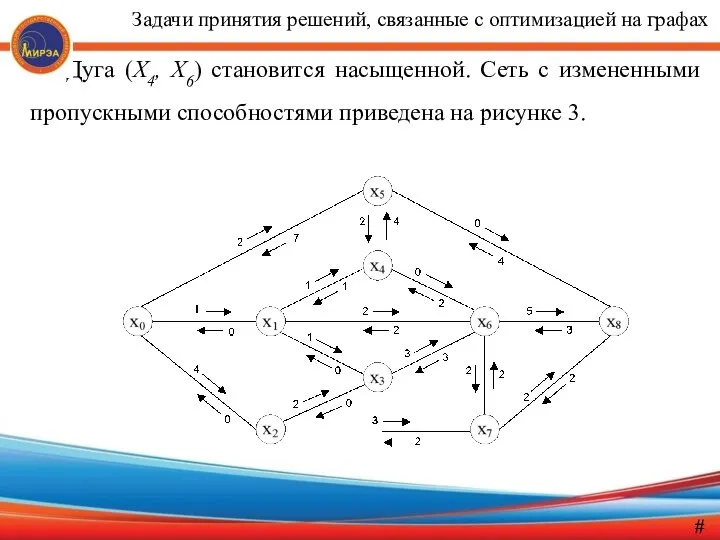
Дуга (X4, X6) становится насыщенной. Сеть с измененными пропускными способностями приведена
Дуга (X4, X6) становится насыщенной. Сеть с измененными пропускными способностями приведена
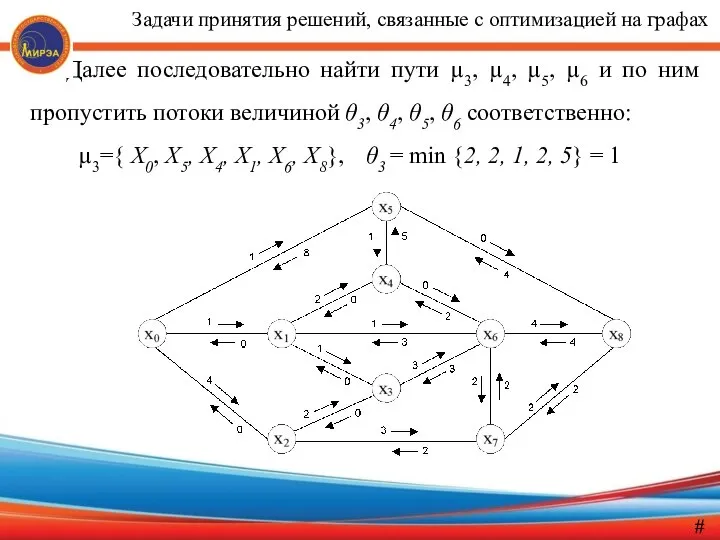
Далее последовательно найти пути µ3, µ4, µ5, µ6 и по ним
Далее последовательно найти пути µ3, µ4, µ5, µ6 и по ним
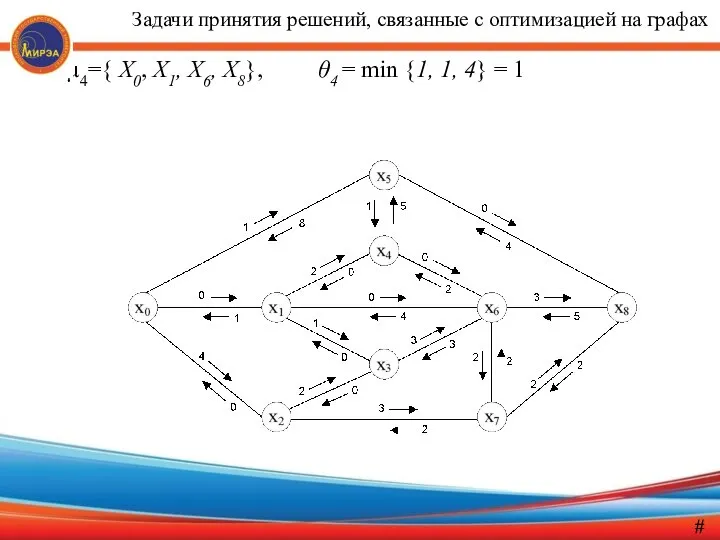
µ4={ X0, X1, X6, X8}, θ4 = min {1, 1, 4}
µ4={ X0, X1, X6, X8}, θ4 = min {1, 1, 4}
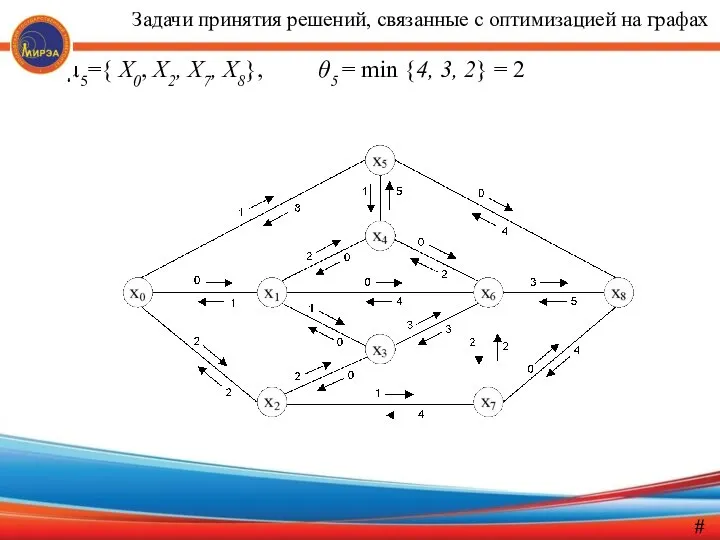
µ5={ X0, X2, X7, X8}, θ5 = min {4, 3, 2} =
µ5={ X0, X2, X7, X8}, θ5 = min {4, 3, 2} =
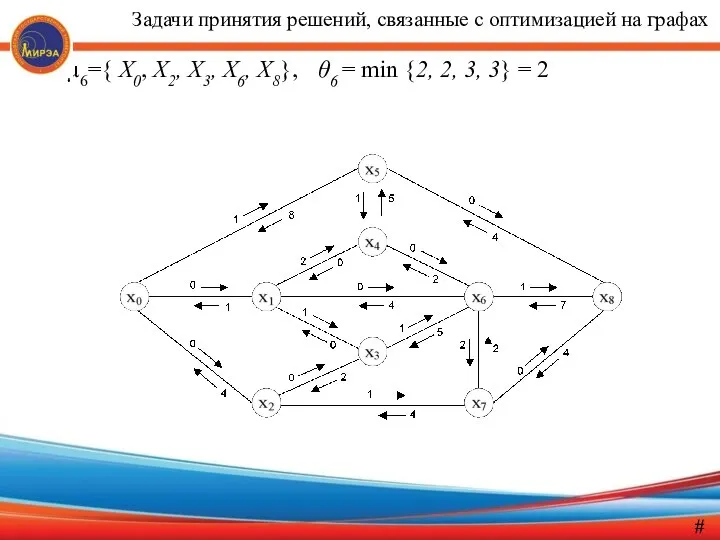
µ6={ X0, X2, X3, X6, X8}, θ6 = min {2, 2, 3,
µ6={ X0, X2, X3, X6, X8}, θ6 = min {2, 2, 3,
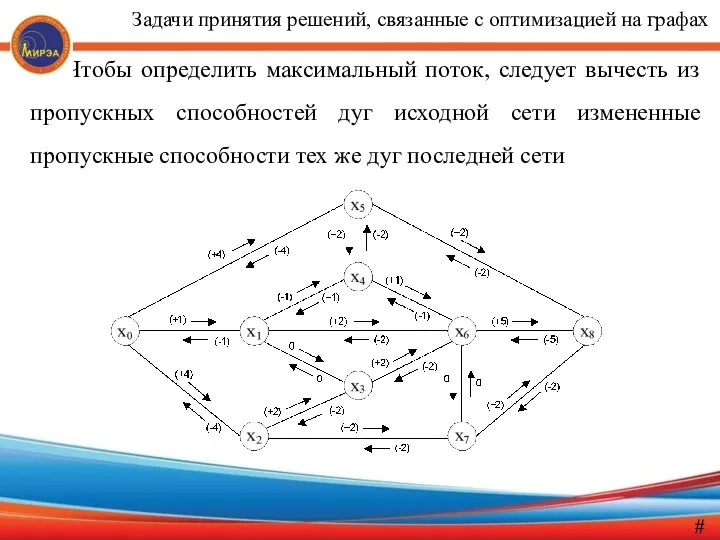
Чтобы определить максимальный поток, следует вычесть из пропускных способностей дуг исходной
Чтобы определить максимальный поток, следует вычесть из пропускных способностей дуг исходной
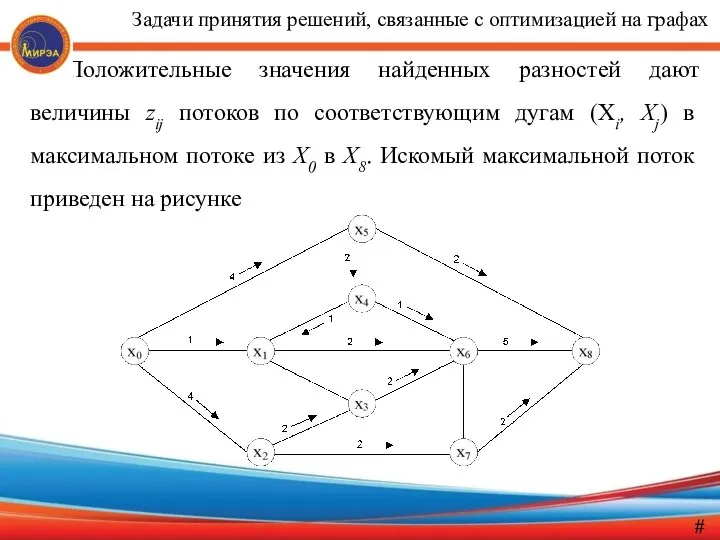
Положительные значения найденных разностей дают величины zij потоков по соответствующим дугам
Положительные значения найденных разностей дают величины zij потоков по соответствующим дугам
Числа, стоящие у каждой дуги, показывают величину потока по данной дуге,
Числа, стоящие у каждой дуги, показывают величину потока по данной дуге,
Пусть имеется игра, в которой участвуют два игрока, причем каждый из
Пусть имеется игра, в которой участвуют два игрока, причем каждый из
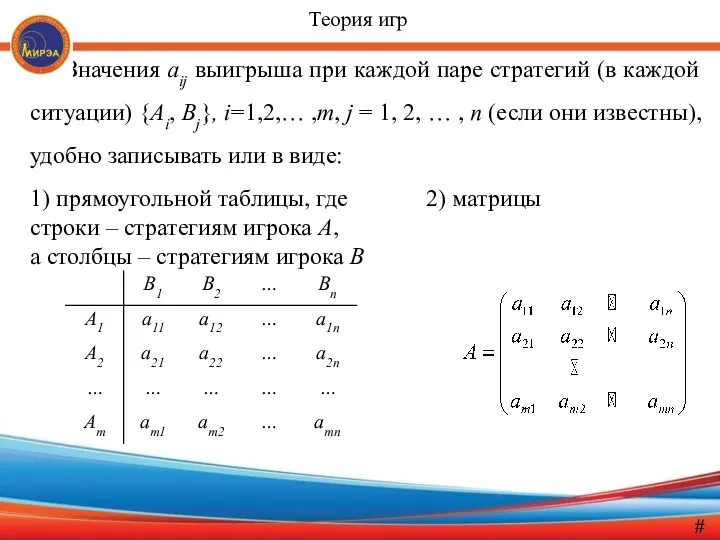
Значения aij выигрыша при каждой паре стратегий (в каждой ситуации) {Ai,
Значения aij выигрыша при каждой паре стратегий (в каждой ситуации) {Ai,
Равновесная ситуация
Два игрока А и В, не глядя друг на друга,
Равновесная ситуация
Два игрока А и В, не глядя друг на друга,
Анализ стратегии игрока А.
Выбирая стратегию игрока А необходимо принимать в
Анализ стратегии игрока А.
Выбирая стратегию игрока А необходимо принимать в
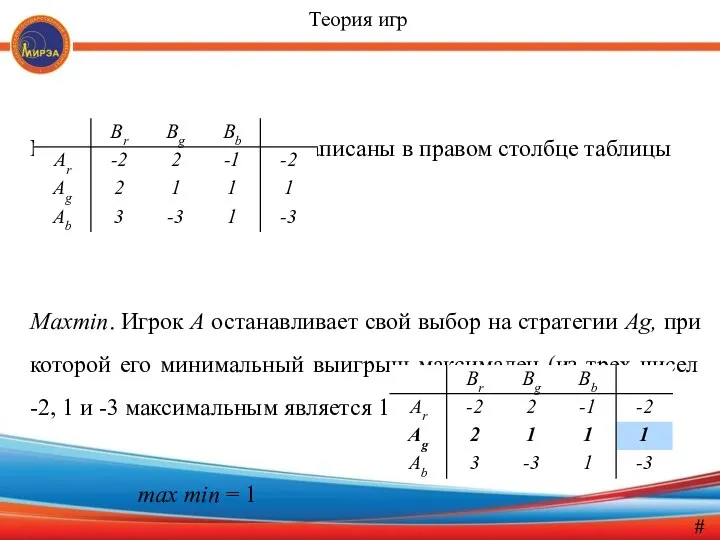
Минимальные выигрыши записаны в правом столбце таблицы
Maxmin. Игрок А останавливает свой
Maxmin. Игрок А останавливает свой
Если игрок А будет придерживаться этой стратегии, то ему гарантирован выигрыш,
Если игрок А будет придерживаться этой стратегии, то ему гарантирован выигрыш,
Выбирая свою стратегию, игрок В должен учитывать, что при этом стратегией
Выбирая свою стратегию, игрок В должен учитывать, что при этом стратегией
Максимальные выигрыши записаны в нижней строке таблицы
Minmax. Игрок В остановит свой
Minmax. Игрок В остановит свой
Если игрок В будет придерживаться этой стратегии, то при любом
Если игрок В будет придерживаться этой стратегии, то при любом
В общем виде:
Число α называется нижней ценой игры.
Число β называется верхней
В общем виде:
Число α называется нижней ценой игры.
Число β называется верхней
Цена игры совпадает с элементом aij матрицы игры А, расположенным на
Цена игры совпадает с элементом aij матрицы игры А, расположенным на
Смешанные стратегии
Пусть имеется произвольная т×п игра, заданная т×п –матрицей
Т.к. игрок А
Смешанные стратегии
Пусть имеется произвольная т×п игра, заданная т×п –матрицей
Т.к. игрок А
Смешанная стратегия второго игрока В, имеющего п чистых стратегий, описывается
Смешанная стратегия второго игрока В, имеющего п чистых стратегий, описывается
Математическое ожидание выигрыша игрока А в условиях ситуации в смешанных
Математическое ожидание выигрыша игрока А в условиях ситуации в смешанных
Пример.
Пусть имеется игра, заданная 2×6 матрицей:
Найти цену игры и оптимальные
Пример.
Пусть имеется игра, заданная 2×6 матрицей:
Найти цену игры и оптимальные
Шаг 2. Вычисление средних выигрышей игрока А (проводится при условии, что
Шаг 2. Вычисление средних выигрышей игрока А (проводится при условии, что
Шаг 3. Построение нижней огибающей.
Аккуратно построив на координатной плоскости (р,
Шаг 3. Построение нижней огибающей.
Аккуратно построив на координатной плоскости (р,
Шаг 4. Отыскание цены игры и оптимальной смешанной стратегии игрока А.
Шаг 4. Отыскание цены игры и оптимальной смешанной стратегии игрока А.
Решая систему уравнений
вычисляется р0:
р = – р + 5(1 – р),
7р
Решая систему уравнений
вычисляется р0:
р = – р + 5(1 – р),
7р
Зная стратегии игрока А определим оптимальную смешанную стратегию игрока B.
Для этого:
Шаг
Зная стратегии игрока А определим оптимальную смешанную стратегию игрока B.
Для этого:
Шаг
Шаг 2. Приравнять любой из двух средних выигрышей игрока В
Шаг 2. Приравнять любой из двух средних выигрышей игрока В
Шаг 3. Получить результат
Полное решение игры имеет следующий вид
#
Шаг 3. Получить результат
Полное решение игры имеет следующий вид
#
Дерево решений — это графическое изображение процесса принятия решений, в
Дерево решений — это графическое изображение процесса принятия решений, в
Дерево решений состоит из узлов и ветвей. Располагаются деревья слева
Дерево решений состоит из узлов и ветвей. Располагаются деревья слева
Когда все решения и их исходы указаны на дереве, просчитывается
Когда все решения и их исходы указаны на дереве, просчитывается
Пример.
Главному инженеру компании надо решить, монтировать или нет новую
Пример.
Главному инженеру компании надо решить, монтировать или нет новую
Эксперимент обойдется в 10 млн. рублей.
Главный инженер считает, что существует
Эксперимент обойдется в 10 млн. рублей.
Главный инженер считает, что существует
#
Дерево решений
#
Дерево решений
Решение.
В узле F возможны исходы «линия работает» с вероятностью 0,4 (что
Решение.
В узле F возможны исходы «линия работает» с вероятностью 0,4 (что
В узле 4 необходимо выбрать между решениями:
1) «монтируем линию» (оценка
В узле 4 необходимо выбрать между решениями:
1) «монтируем линию» (оценка
Аналогично оцениваются узлы B, C, 2, D, E, 3, A:
EMV(
Аналогично оцениваются узлы B, C, 2, D, E, 3, A:
EMV(
EMV(D) = 0,2 ∙ 200 + 0,8 ∙ (-150) = 40
EMV(D) = 0,2 ∙ 200 + 0,8 ∙ (-150) = 40
Ответ.
Экспериментальную установку строить следует.
Если установка работает, то монтируем линию. Если
Ответ.
Экспериментальную установку строить следует.
Если установка работает, то монтируем линию. Если
 Метод Дельфи
Метод Дельфи Народный костюм
Народный костюм Арт-терапия
Арт-терапия Организация, планирование, мотивация и контроль. Тема 1.3
Организация, планирование, мотивация и контроль. Тема 1.3 ГРУППА ПРОДЛЕННОГО ДНЯ ГУО «Ольшанская средняя школа №1»
ГРУППА ПРОДЛЕННОГО ДНЯ ГУО «Ольшанская средняя школа №1» Ростов Великий
Ростов Великий Элементарные сведения о компьютере и устранение простейших неисправностей
Элементарные сведения о компьютере и устранение простейших неисправностей Известные протестанты
Известные протестанты Культурное развитие России в XIX веке
Культурное развитие России в XIX веке Трудности адаптации первоклассников в школе. Штурмуйте каждую проблему с энтузиазмом…как если бы от этого зависела Ваша жизнь. Л.Кьюби
Трудности адаптации первоклассников в школе. Штурмуйте каждую проблему с энтузиазмом…как если бы от этого зависела Ваша жизнь. Л.Кьюби Презентация на тему "Об использовании дистанционных образовательных технологий в образовательном процессе" - скачать презен
Презентация на тему "Об использовании дистанционных образовательных технологий в образовательном процессе" - скачать презен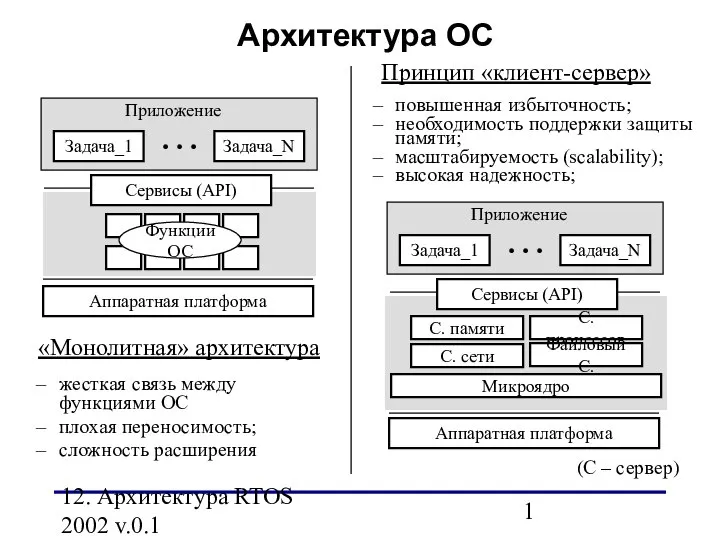 Архитектура ОС
Архитектура ОС Кижи
Кижи  Химия в строительстве
Химия в строительстве  Религия Средневековья
Религия Средневековья Социальный проект “«Second Hand» для бытовых отходов” Авторы: учащиеся 11Б класса МОАУ СОШ №30 г. Кирова Боровикова В. А. Нестерова Д. С. Ефимова Е. А. Руководитель: Толстова И. Н.
Социальный проект “«Second Hand» для бытовых отходов” Авторы: учащиеся 11Б класса МОАУ СОШ №30 г. Кирова Боровикова В. А. Нестерова Д. С. Ефимова Е. А. Руководитель: Толстова И. Н.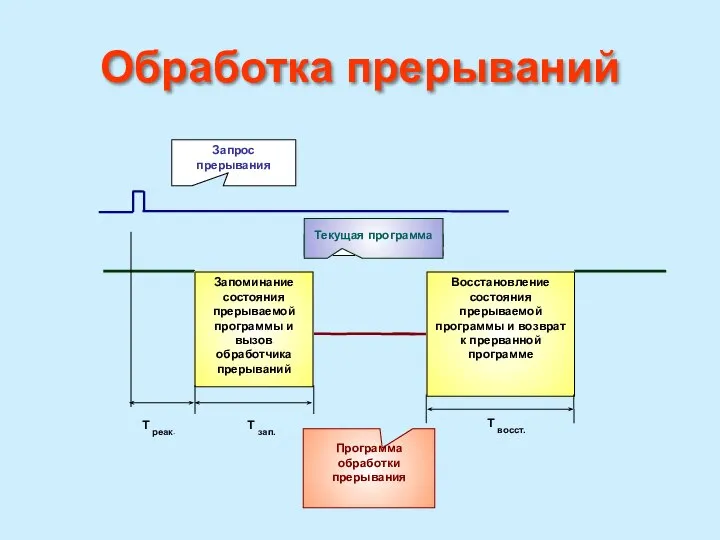 Прерывания
Прерывания «Программа деятельности педагогического коллектива в работе со слабоуспевающими и неуспевающими учащимися» Булатова Л.П. – ди
«Программа деятельности педагогического коллектива в работе со слабоуспевающими и неуспевающими учащимися» Булатова Л.П. – ди Конструирование алгоритмов. Вспомогательный алгоритм. (9 класс)
Конструирование алгоритмов. Вспомогательный алгоритм. (9 класс) Государственная экономическая политика
Государственная экономическая политика Государство, как политический институт
Государство, как политический институт Видеорегистратор. Видеокамера
Видеорегистратор. Видеокамера Совершенствование вычислительных машин
Совершенствование вычислительных машин Презентация «Несовершенная конкуренция на рынке труда».
Презентация «Несовершенная конкуренция на рынке труда». Теодор Драйзер
Теодор Драйзер Выжигание
Выжигание Пять самых известных храмов Японии
Пять самых известных храмов Японии Судебно-медицинская токсикология
Судебно-медицинская токсикология