- Биомеханика опорно-двигательного аппарата человека. Биофизика мышечного сокращения

Содержание
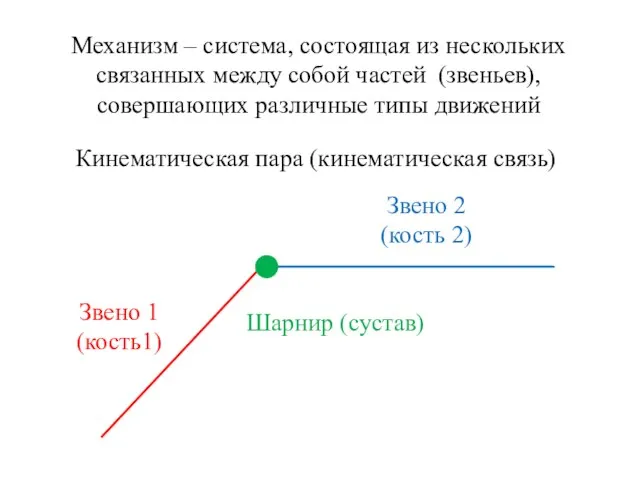
- 2. Механизм – система, состоящая из нескольких связанных между собой частей (звеньев), совершающих различные типы движений Кинематическая
- 3. Кинематическая цепь (КЦ)
- 4. Число степеней свободы механизма – число независимых координат, необходимых для определения положения всех звеньев механизма или
- 5. Отдельное свободное звено: Число ограничений, накладываемых на движение одного звена относительно другого звена – класс сустава:
- 6. Звено 1 Звено 2
- 7. 1 2 1 2
- 9. Число степеней свободы механизма: N – число подвижных звеньев; N – 1 – число сочленений; хС3,
- 10. Скелет человека:
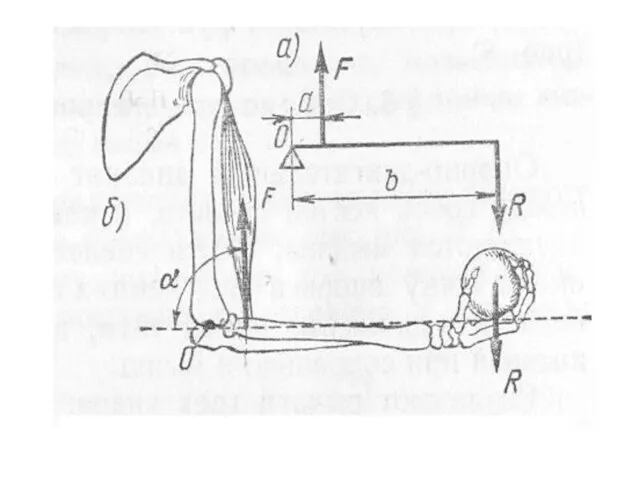
- 11. ОДА = сочлененные кости скелета + + сухожилия и мышцы = = совокупность рычагов, удерживаемых и
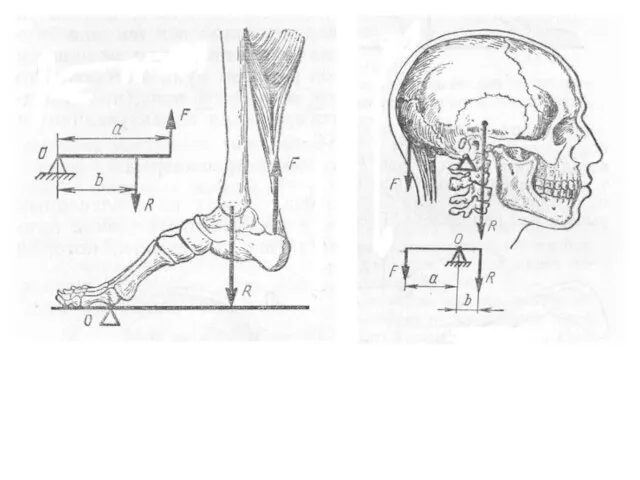
- 12. Рычаг Рычаг силы
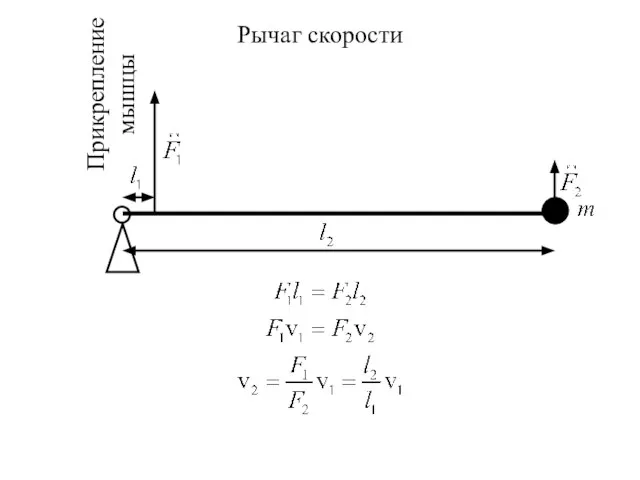
- 14. Рычаг скорости
- 15. Рычаг скорости Прикрепление мышцы
- 16. Свинг и хук:
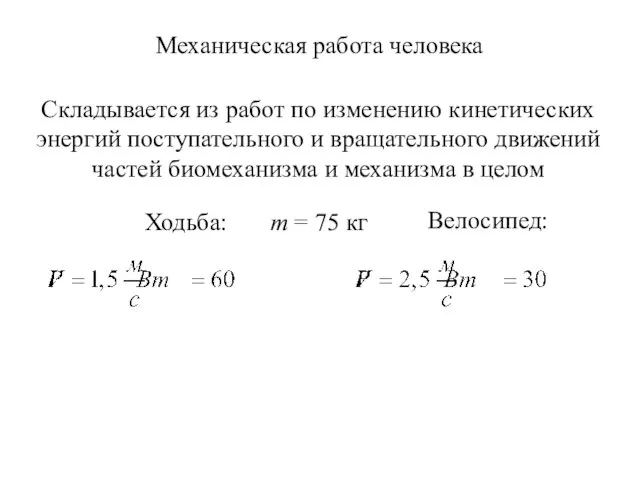
- 18. Механическая работа человека Складывается из работ по изменению кинетических энергий поступательного и вращательного движений частей биомеханизма
- 19. m = 75 кг h = 1,40 м t = 0,2 c
- 20. «Статическая» работа мышц
- 21. Эргометрия – методы количественной оценки работоспособности человека путем регистрации его мышечной работы с одновременным ЭКГ и
- 22. Общие выводы: Скелет человека – сложный биомеханизм с большим числом звеньев и сочленений между ними, т.е.
- 24. Скачать презентацию
Механизм – система, состоящая из нескольких
связанных между собой частей (звеньев),
совершающих различные
Механизм – система, состоящая из нескольких
связанных между собой частей (звеньев),
совершающих различные
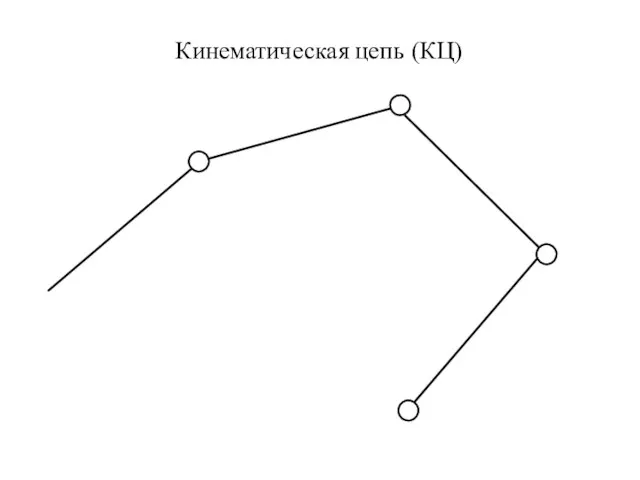
Кинематическая цепь (КЦ)
Кинематическая цепь (КЦ)
Число степеней свободы механизма – число
независимых координат, необходимых
для определения положения всех
Число степеней свободы механизма – число
независимых координат, необходимых
для определения положения всех
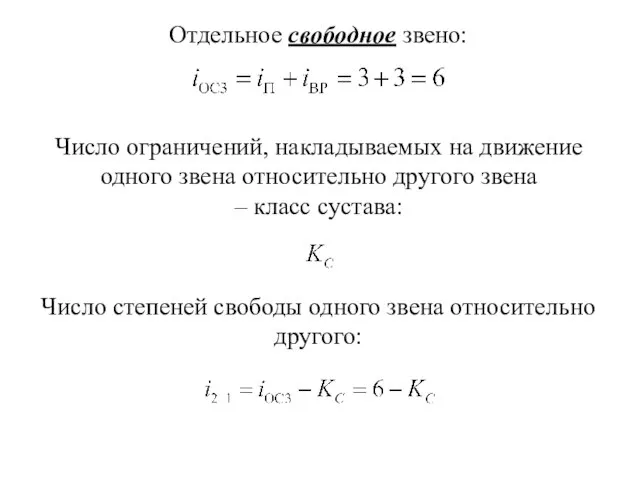
Отдельное свободное звено:
Число ограничений, накладываемых на движение
одного звена относительно другого звена
Отдельное свободное звено:
Число ограничений, накладываемых на движение
одного звена относительно другого звена
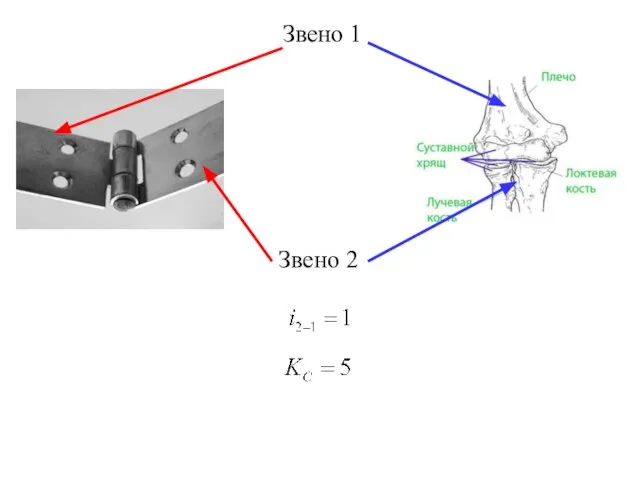
Звено 1
Звено 2
Звено 1
Звено 2
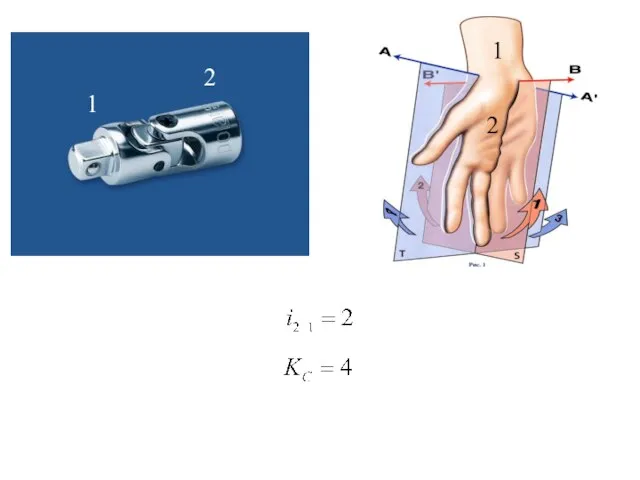
1
2
1
2
1
2
1
2

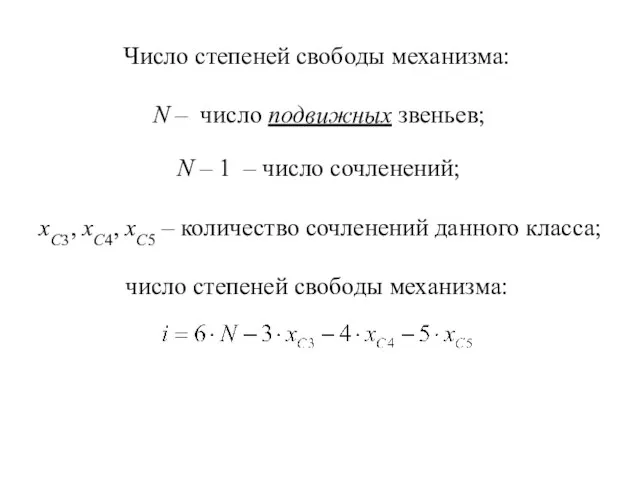
Число степеней свободы механизма:
N – число подвижных звеньев;
N – 1 –
Число степеней свободы механизма:
N – число подвижных звеньев;
N – 1 –
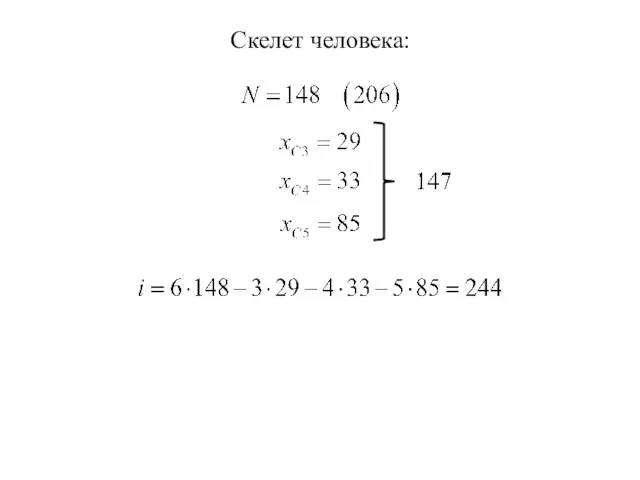
Скелет человека:
Скелет человека:
ОДА = сочлененные кости скелета +
+ сухожилия и мышцы =
ОДА = сочлененные кости скелета +
+ сухожилия и мышцы =
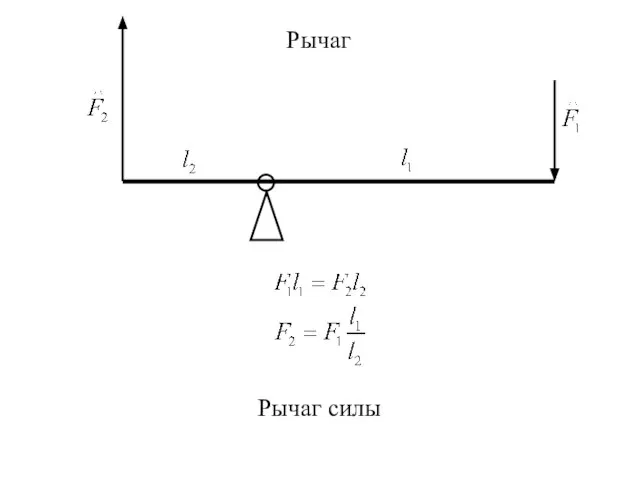
Рычаг
Рычаг силы
Рычаг
Рычаг силы
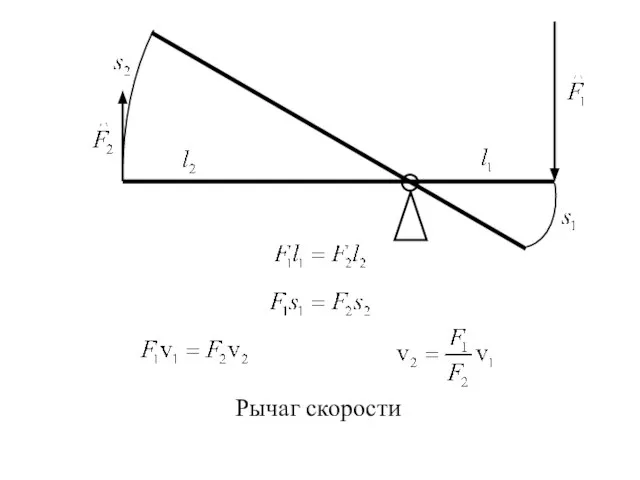
Рычаг скорости
Рычаг скорости
Рычаг скорости
Прикрепление
мышцы
Рычаг скорости
Прикрепление
мышцы
Свинг и хук:
Свинг и хук:
Механическая работа человека
Складывается из работ по изменению кинетических
энергий поступательного и вращательного
Механическая работа человека
Складывается из работ по изменению кинетических
энергий поступательного и вращательного
m = 75 кг
h = 1,40 м
t = 0,2 c
m = 75 кг
h = 1,40 м
t = 0,2 c
«Статическая» работа мышц
«Статическая» работа мышц
Эргометрия – методы количественной оценки
работоспособности человека путем
регистрации его мышечной работы
Эргометрия – методы количественной оценки
работоспособности человека путем
регистрации его мышечной работы
Общие выводы:
Скелет человека – сложный биомеханизм с
большим числом звеньев и
Общие выводы:
Скелет человека – сложный биомеханизм с
большим числом звеньев и
 Волоколамский муниципальный район МОУ «Клишинская основная общеобразовательная школа»
Волоколамский муниципальный район МОУ «Клишинская основная общеобразовательная школа»  Мыши - семейство млекопитающих отряда грызунов
Мыши - семейство млекопитающих отряда грызунов Пищевые продукты и питательные вещества, их роль в обмене веществ.
Пищевые продукты и питательные вещества, их роль в обмене веществ. Ураження електричним струмом.
Ураження електричним струмом.  ЗНАЧЕНИЕ ДЫХАНИЯ. ОРГАНЫ ДЫХАТЕЛЬНОЙ СИСТЕМЫ.
ЗНАЧЕНИЕ ДЫХАНИЯ. ОРГАНЫ ДЫХАТЕЛЬНОЙ СИСТЕМЫ. Презентация на тему "Биология - наука о жвом мире. Общие свойства живых организмов" - скачать презентации по Биологии
Презентация на тему "Биология - наука о жвом мире. Общие свойства живых организмов" - скачать презентации по Биологии Выполнила ученица 10-а класса ГорбаТенко Екатерина Руководитель: Зенкова Н.В Глаза - окно в окружающий мир
Выполнила ученица 10-а класса ГорбаТенко Екатерина Руководитель: Зенкова Н.В Глаза - окно в окружающий мир Ядовитые Растения
Ядовитые Растения Клеточная теория Клетка как биологическая система. Клеточная теория, ее основные положения
Клеточная теория Клетка как биологическая система. Клеточная теория, ее основные положения Презентация на тему "ОПРЕДЕЛЕНИЕ АКТИВНОСТИ ЛАКТАТДЕГИДРОГЕНАЗЫ В СЫВОРОТКЕ КРОВИ" - скачать бесплатно презентации по Биоло
Презентация на тему "ОПРЕДЕЛЕНИЕ АКТИВНОСТИ ЛАКТАТДЕГИДРОГЕНАЗЫ В СЫВОРОТКЕ КРОВИ" - скачать бесплатно презентации по Биоло Минеральное питание растений
Минеральное питание растений Геномика и протеомика. Значение для поиска новых лекарств
Геномика и протеомика. Значение для поиска новых лекарств Работу выполнила Целикова И.В. учитель биологии МОУ Николо-Кормской СОШ Рыбинского района Ярославской области Работу выполнила
Работу выполнила Целикова И.В. учитель биологии МОУ Николо-Кормской СОШ Рыбинского района Ярославской области Работу выполнила Механизмы вдоха и выдоха. Регуляция дыхания
Механизмы вдоха и выдоха. Регуляция дыхания углеводы
углеводы Строение растительной и животной клеток под микроскопом
Строение растительной и животной клеток под микроскопом Культивирование лекарственных растений
Культивирование лекарственных растений Презентацию разработала: Бородина Ольга Олеговна Учитель биологии МАОУ СОШ № 119 г. Пермь
Презентацию разработала: Бородина Ольга Олеговна Учитель биологии МАОУ СОШ № 119 г. Пермь  Презентация на тему "Кристаллические решетки" - скачать презентации по Биологии
Презентация на тему "Кристаллические решетки" - скачать презентации по Биологии Морфо-функциональная характеристика аппарата движения. Остеология. Скелет черепа
Морфо-функциональная характеристика аппарата движения. Остеология. Скелет черепа Обмен веществ и энергии. Питательные вещества. Пищевые продукты
Обмен веществ и энергии. Питательные вещества. Пищевые продукты Скелет конечностей
Скелет конечностей Презентация на тему "МЕТАБОЛИЗМ" - скачать бесплатно презентации по Биологии
Презентация на тему "МЕТАБОЛИЗМ" - скачать бесплатно презентации по Биологии Phylogenetic disorders of brain
Phylogenetic disorders of brain Злаковые. Общие признаки злаковых
Злаковые. Общие признаки злаковых Земля – планета землясуша
Земля – планета землясуша Строение и функции семян
Строение и функции семян Морской окунь
Морской окунь