Анализ предельных возможностей и свойств исследуемой модели подводного аппарата (ПА), как объекта оптимального управления
- Анализ предельных возможностей и свойств исследуемой модели подводного аппарата (ПА), как объекта оптимального управления

Содержание
- 2. Цели и задачи Анализ предельных возможностей и свойств исследуемой модели подводного аппарата (ПА) как объекта оптимального
- 3. Системы координат пространственного движения подводного аппарата Связанная и земная «неподвижная» системы координат
- 4. Критерии оптимизации Минимум радиуса циркуляции при пространственном маневре в горизонтальной плоскости. Минимизация времени выхода на заданный
- 5. Модель ПА Уравнения сил:
- 6. Модель ПА Уравнения моментов:
- 7. Создание моделирующего комплекса в среде «МВТУ» Структура управления:
- 8. Нелинейности в моделях устройств Скоростная характеристика сервомотора без зоны нечувствительности предикатное описание; оператор В.Н. Козлова: Динамическая
- 9. Математическая модель гидравлического сервопривода регулирующего клапана турбины где ϕн , ϕв и v вычисляются по формулам:
- 10. Модель рулевой машины - нелинейное динамическое звено типа «упор» Уравнения
- 11. Элемент – Динамическое нелинейное звено типа «Гистерезис» Структурное представление гистерезисного звена
- 12. Реализация в МВТУ
- 13. Разработана сетевая версия
- 14. Блок управления
- 15. ВИРТУАЛЬНЫЙ ПУЛЬТ УПРАВЛЕНИЯ
- 16. Внешний вид пульта управления и индикации
- 17. Внешний вид дополнительных панелей анимации
- 18. Анимированные панели управления и диагностики
- 19. Вычислительные эксперименты Анализ поведения системы при отключенном контуре стабилизации глубины. Анализ модели при идеальном удержании крена
- 20. Результаты
- 21. Сравнение поведения ПА при «правильном вираже» с ЛА Минимум радиуса циркуляции и минимум времени выхода на
- 22. Зависимости радиуса циркуляции и угловой скорости от скорости хода и положения руля при ограничениях угла крена
- 23. Сравнение выявленных закономерностей для ПА с известными закономерностями для летательных аппаратов (ЛА) при осуществлении ЛА правильного
- 25. ОПРЕДЕЛЕНИЕ ОПТИМАЛЬНОЙ СКОРОСТИ ДВИЖЕНИЯ ПА НА ЦИРКУЛЯЦИИ ОДНОВРЕМЕННО ПО ДВУМ КРИТЕРИЯМ: МИНИМУМИЗАЦИЯ РАДИУСА ЦИРКУЛЯЦИИ и -
- 27. Сравнение качества выполненя глубокой циркуляции (разворот на 180 градусов) для различных значений максимально допустимого крена: 5,
- 28. Варианты функционально-алгоритмической структуры УС
- 30. Основные результаты 1. Систематизированы основные положения математического моделирования динамики комплекса «Подводный аппарат – рулевые устройства –
- 31. 4. Отработана технология создания в среде «МВТУ» компьютерных тренажеров с реализацией виртуальных панелей пультов управления. Продемонстрирована
- 32. 6. Разработан ИВК в сетевом варианте с реализацией обмена информацией по протоколу TCP/IP с : Моделями
- 33. 7. Создана применительно к ранним стадиям проектирования Система Автоматизированного Проектирования (САПР) функциональных, алгоритмических, технических и других
- 34. 9. Выявлен ряд важных, быть может ранее не полностью вскрытых, свойств ПА как многомерного объекта оптимального
- 36. Скачать презентацию

Цели и задачи
Анализ предельных возможностей и свойств исследуемой модели подводного аппарата
Цели и задачи
Анализ предельных возможностей и свойств исследуемой модели подводного аппарата

Системы координат пространственного движения подводного аппарата
Связанная и земная «неподвижная» системы координат
Системы координат пространственного движения подводного аппарата
Связанная и земная «неподвижная» системы координат

Критерии оптимизации
Минимум радиуса циркуляции при пространственном маневре в горизонтальной плоскости.
Минимизация времени
Критерии оптимизации
Минимум радиуса циркуляции при пространственном маневре в горизонтальной плоскости.
Минимизация времени

Модель ПА
Уравнения сил:
Модель ПА
Уравнения сил:

Модель ПА
Уравнения моментов:
Модель ПА
Уравнения моментов:

Создание моделирующего комплекса в среде «МВТУ»
Структура управления:
Создание моделирующего комплекса в среде «МВТУ»
Структура управления:
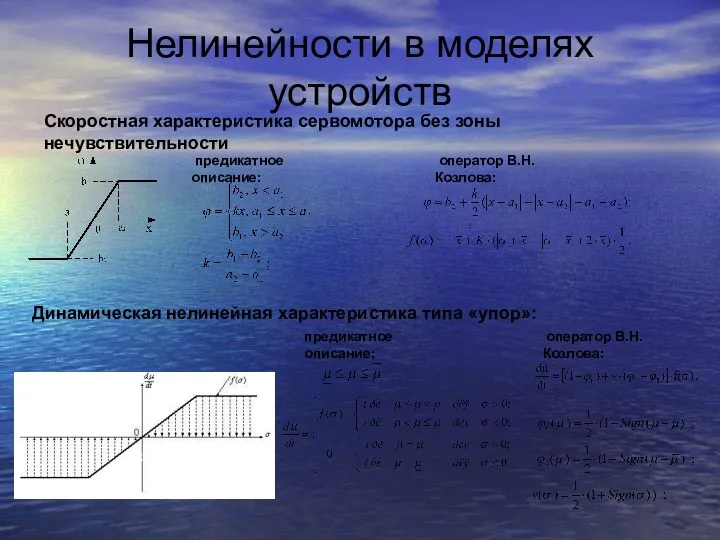
Нелинейности в моделях устройств
Скоростная характеристика сервомотора без зоны нечувствительности
предикатное описание;
оператор
Нелинейности в моделях устройств
Скоростная характеристика сервомотора без зоны нечувствительности
предикатное описание;
оператор

Математическая модель гидравлического сервопривода регулирующего клапана турбины
где ϕн , ϕв и
Математическая модель гидравлического сервопривода регулирующего клапана турбины
где ϕн , ϕв и
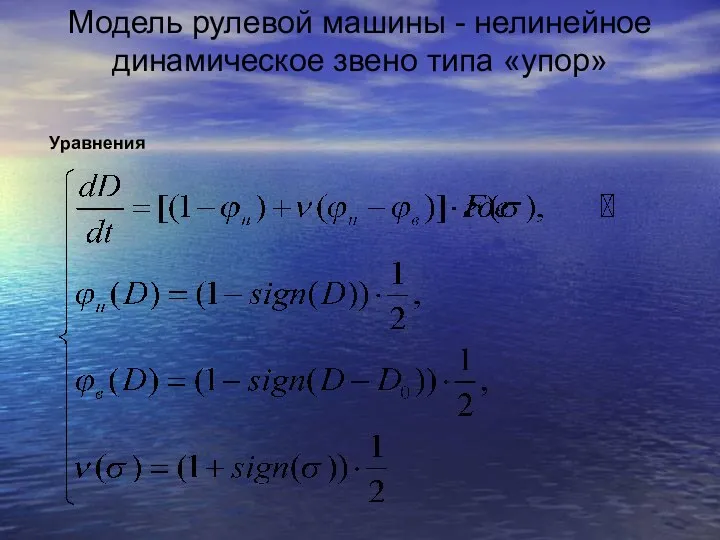
Модель рулевой машины - нелинейное динамическое звено типа «упор»
Уравнения
Модель рулевой машины - нелинейное динамическое звено типа «упор»
Уравнения

Элемент – Динамическое нелинейное звено типа «Гистерезис»
Структурное представление гистерезисного звена
Элемент – Динамическое нелинейное звено типа «Гистерезис»
Структурное представление гистерезисного звена

Реализация в МВТУ
Реализация в МВТУ

Разработана сетевая версия
Разработана сетевая версия
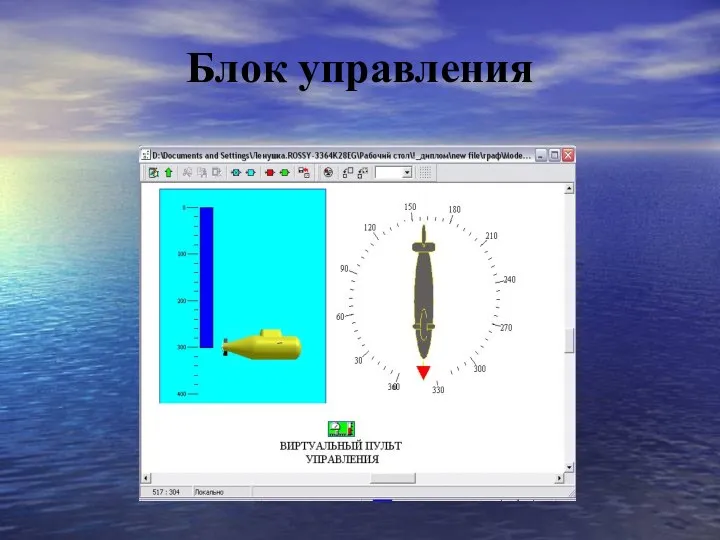
Блок управления
Блок управления

ВИРТУАЛЬНЫЙ ПУЛЬТ УПРАВЛЕНИЯ
ВИРТУАЛЬНЫЙ ПУЛЬТ УПРАВЛЕНИЯ

Внешний вид пульта управления и индикации
Внешний вид пульта управления и индикации

Внешний вид дополнительных панелей анимации
Внешний вид дополнительных панелей анимации

Анимированные панели управления и диагностики
Анимированные панели управления и диагностики

Вычислительные эксперименты
Анализ поведения системы при отключенном контуре стабилизации глубины.
Анализ модели при
Вычислительные эксперименты
Анализ поведения системы при отключенном контуре стабилизации глубины.
Анализ модели при

Результаты
Результаты

Сравнение поведения ПА при «правильном вираже» с ЛА
Минимум радиуса циркуляции и
Сравнение поведения ПА при «правильном вираже» с ЛА
Минимум радиуса циркуляции и

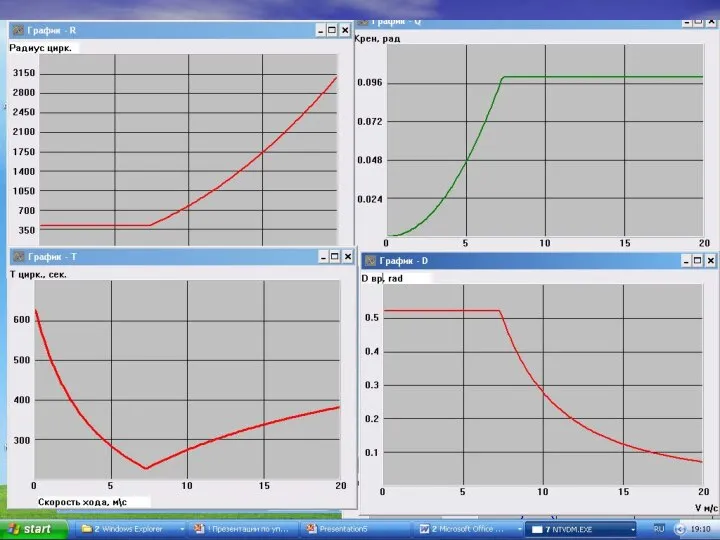
Зависимости радиуса циркуляции и угловой скорости от скорости хода и положения
Зависимости радиуса циркуляции и угловой скорости от скорости хода и положения

Сравнение выявленных закономерностей для ПА с известными закономерностями для летательных аппаратов
Сравнение выявленных закономерностей для ПА с известными закономерностями для летательных аппаратов
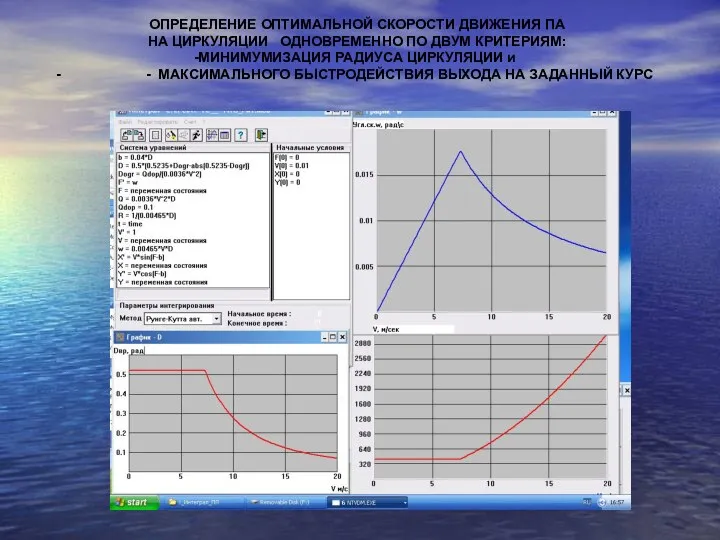
ОПРЕДЕЛЕНИЕ ОПТИМАЛЬНОЙ СКОРОСТИ ДВИЖЕНИЯ ПА
НА ЦИРКУЛЯЦИИ ОДНОВРЕМЕННО ПО ДВУМ КРИТЕРИЯМ:
МИНИМУМИЗАЦИЯ
ОПРЕДЕЛЕНИЕ ОПТИМАЛЬНОЙ СКОРОСТИ ДВИЖЕНИЯ ПА
НА ЦИРКУЛЯЦИИ ОДНОВРЕМЕННО ПО ДВУМ КРИТЕРИЯМ:
МИНИМУМИЗАЦИЯ


Сравнение качества выполненя глубокой циркуляции
(разворот на 180 градусов)
для различных
(разворот на 180 градусов)
для различных

Варианты функционально-алгоритмической структуры УС
Варианты функционально-алгоритмической структуры УС


Основные результаты
1. Систематизированы основные положения математического моделирования динамики комплекса «Подводный аппарат
1. Систематизированы основные положения математического моделирования динамики комплекса «Подводный аппарат
4. Отработана технология создания в среде «МВТУ» компьютерных тренажеров с реализацией
4. Отработана технология создания в среде «МВТУ» компьютерных тренажеров с реализацией
6. Разработан ИВК в сетевом варианте с реализацией обмена информацией по
6. Разработан ИВК в сетевом варианте с реализацией обмена информацией по

7. Создана применительно к ранним стадиям проектирования Система Автоматизированного Проектирования (САПР)
7. Создана применительно к ранним стадиям проектирования Система Автоматизированного Проектирования (САПР)

9. Выявлен ряд важных, быть может ранее не полностью вскрытых, свойств
9. Выявлен ряд важных, быть может ранее не полностью вскрытых, свойств
 История открытия электромагнитной индукции
История открытия электромагнитной индукции Физика твёрдого тела. Кристаллические и аморфные твёрдые тела
Физика твёрдого тела. Кристаллические и аморфные твёрдые тела «Теория А. Геманта» Выполнил: Студент группы 5А1В Полевечко Максим
«Теория А. Геманта» Выполнил: Студент группы 5А1В Полевечко Максим  Физика и техника. Лабораторная работа №1
Физика и техника. Лабораторная работа №1 Лазерные и телевизионные системы траекторных измерений. Лазерные передатчики
Лазерные и телевизионные системы траекторных измерений. Лазерные передатчики Свет как электромагнитная волна
Свет как электромагнитная волна Статистическая теория радиотехнических систем. Задача фильтрации. (Лекция 13)
Статистическая теория радиотехнических систем. Задача фильтрации. (Лекция 13) Изучение атмосферного давления. Лекция 2
Изучение атмосферного давления. Лекция 2 Решение задач на емкость конденсатора. Практическое занятие №16
Решение задач на емкость конденсатора. Практическое занятие №16 Небольшое небесное тело комета
Небольшое небесное тело комета Презентация по физике "Различные магниты" - скачать
Презентация по физике "Различные магниты" - скачать  Применение интерференции в технике
Применение интерференции в технике Презентация по физике "Манометры и гидравлическое оборудование" - скачать
Презентация по физике "Манометры и гидравлическое оборудование" - скачать  Физика твердого тела
Физика твердого тела Равномерное прямолинейное движение
Равномерное прямолинейное движение Работа и мощность электрического тока
Работа и мощность электрического тока Cокол тысячелетия 10,08
Cокол тысячелетия 10,08 Квантовые свойства электромагнитного излучения
Квантовые свойства электромагнитного излучения Конструкция тележек
Конструкция тележек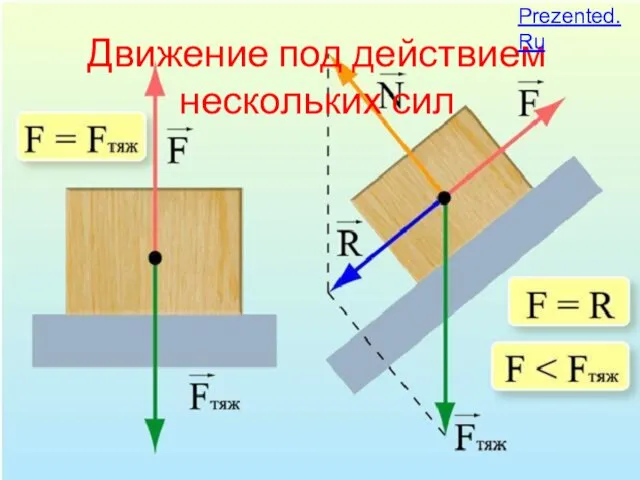 Движение под действием нескольких сил
Движение под действием нескольких сил Волновая оптика
Волновая оптика Бүкіл әлемдік тартылыс күші
Бүкіл әлемдік тартылыс күші Нелинейно-оптическая диагностика сегнетоэлектрических тонких пленок и наноструктур для микроэлектроники
Нелинейно-оптическая диагностика сегнетоэлектрических тонких пленок и наноструктур для микроэлектроники Линзы. Оптическая сила линзы. Выполнила: учитель физики МОУ «СОШ №6» г.Кирова Калужской области Кочергина В.Э. 2010 год
Линзы. Оптическая сила линзы. Выполнила: учитель физики МОУ «СОШ №6» г.Кирова Калужской области Кочергина В.Э. 2010 год Электромагнитные колебания и волны. Задачи
Электромагнитные колебания и волны. Задачи Введение. Типы измерений. Понияти о погрешности
Введение. Типы измерений. Понияти о погрешности Применение электромагнитов
Применение электромагнитов Энергия топлива. Удельная теплота сгорания топлива
Энергия топлива. Удельная теплота сгорания топлива