- Динамика линейных САУ

Содержание
- 2. Лекция 7. Динамика линейных САУ. План лекции: Типовые входные воздействия. Динамические характеристики САУ.
- 3. 1. Типовые входные воздействия В реальных условиях любой объект регулирования подвержен воздействию случайных возмущений и поэтому
- 4. 1. Типовые входные воздействия Для выявления динамических свойств объекта регулирования (ОР) необходимо узнать его реакцию на
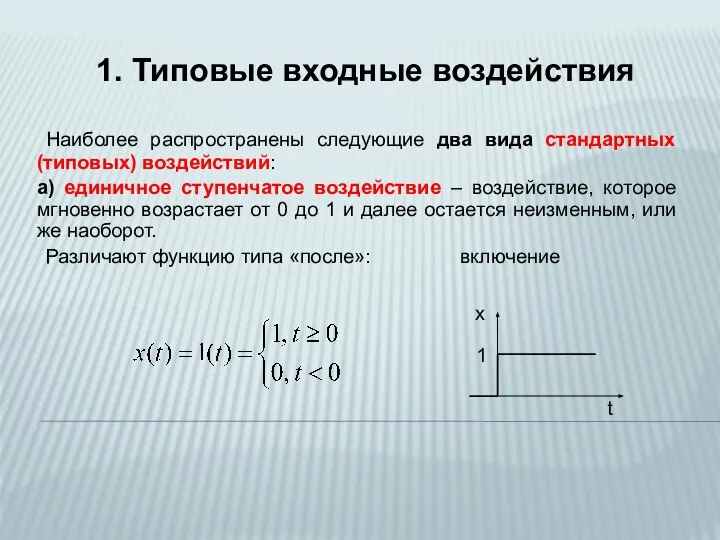
- 5. 1. Типовые входные воздействия Наиболее распространены следующие два вида стандартных (типовых) воздействий: а) единичное ступенчатое воздействие
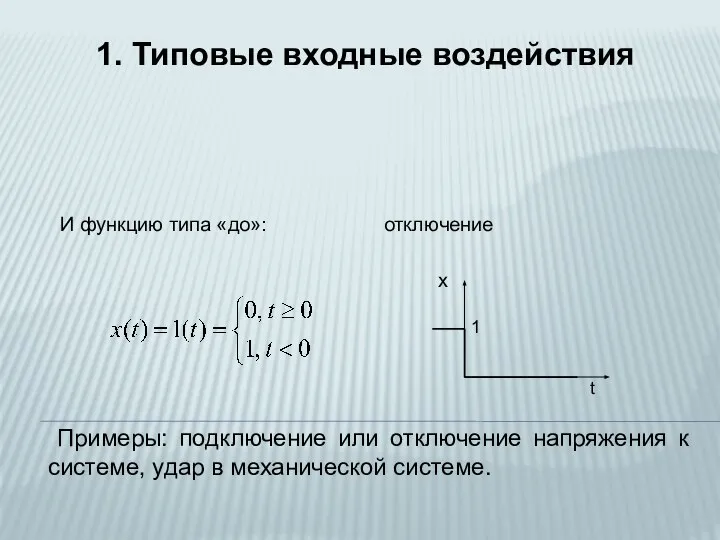
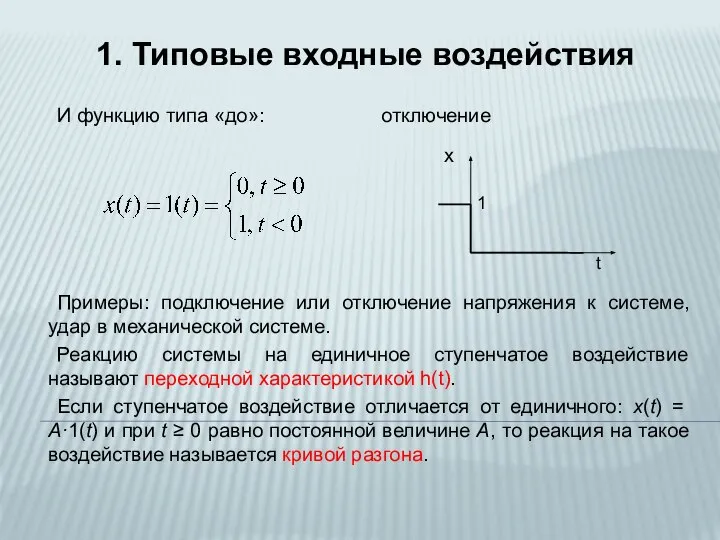
- 6. 1. Типовые входные воздействия И функцию типа «до»: отключение Примеры: подключение или отключение напряжения к системе,
- 7. 1. Типовые входные воздействия И функцию типа «до»: отключение Примеры: подключение или отключение напряжения к системе,
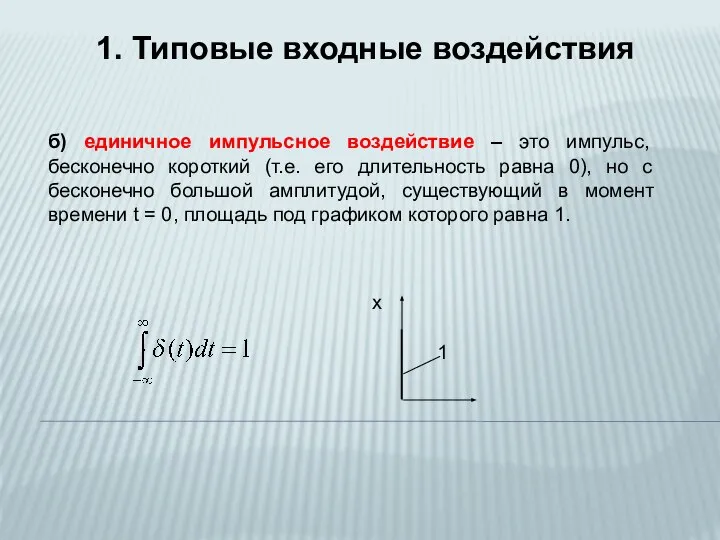
- 8. 1. Типовые входные воздействия б) единичное импульсное воздействие – это импульс, бесконечно короткий (т.е. его длительность
- 9. 1. Типовые входные воздействия Единичный импульс – это математическая идеализация предельно короткого импульсного сигнала, а реально
- 10. 2. Динамические характеристики САУ До подачи стандартного воздействия объект должен находиться в состоянии равновесия, т.е. его
- 11. 2. Динамические характеристики САУ Динамические свойства могут быть представлены в виде: Дифференциальных уравнений; Передаточных функций; Кривых
- 12. Одной из наиболее часто применяемых форм описания динамических свойств элементов САУ является кривая (характеристика) разгона. Кривой
- 13. На рисунке приведена кривая разгона термоэлектрического преобразователя, полученная путем погружения его из помещения с t =
- 14. 2. Динамические свойства САУ
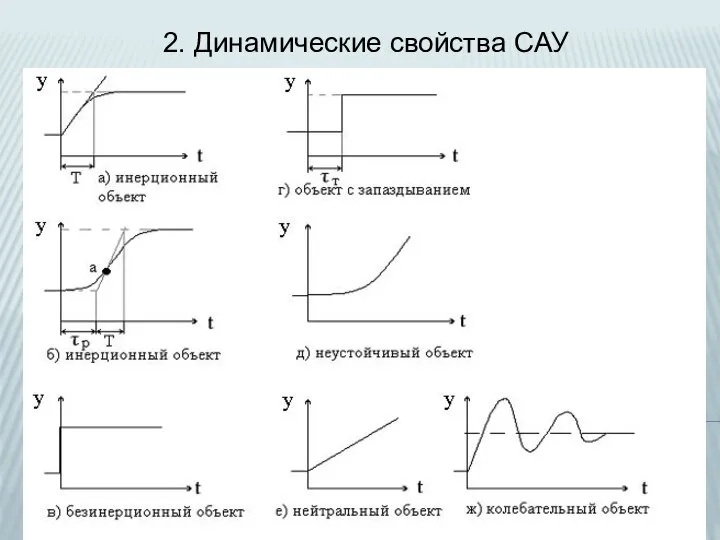
- 15. 2. Динамические свойства САУ Переходные процессы являются универсальным средством изучения динамических свойств объектов. Но как же
- 16. 2. Динамические свойства САУ Наиболее широко распространенное свойство инерции промышленных объектов как устойчивых, так и нейтральных
- 17. 2. Динамические свойства САУ Постоянную времени Т можно найти по графику переходного процесса. Для этого следует
- 18. 2. Динамические свойства САУ 2. Еще одним важным свойством объектов реальных является запаздывание. Оно проявляется в
- 19. 2. Динамические свойства САУ Запаздывание является неблагоприятным свойством объектов с точки зрения их регулирования. Действительно, в
- 20. 2. Динамические свойства САУ Мы рассматривали объекты регулирования, в которых переходные процессы заканчиваются установившемся значением выходного
- 21. 2. Динамические свойства САУ Такие объекты довольно редки, значительно чаще встречаются нейтральные объекты. Нейтральный объект можно
- 22. 2. Динамические свойства САУ Устойчивые объекты легче поддаются управлению, чем неустойчивые. В любом неустойчивом объекте отклонение
- 23. 2. Динамические свойства САУ Степень самовыравнивания, как отмечалось, характеризует запас устойчивости объекта регулирования. Объекты с большим
- 24. Вопросы для самопроверки: 1) Что такое типовое входное воздействие? 2) Какие бывают типовые входные воздействия? 3)
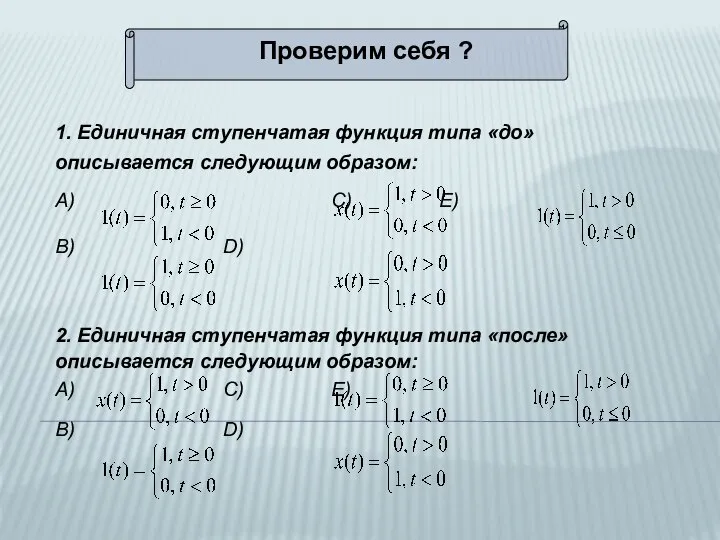
- 25. Проверим себя ? 1. Единичная ступенчатая функция типа «до» описывается следующим образом: А) C) E) B)
- 27. Скачать презентацию
Лекция 7. Динамика линейных САУ.
План лекции:
Типовые входные воздействия.
Динамические характеристики САУ.
Лекция 7. Динамика линейных САУ.
План лекции:
Типовые входные воздействия.
Динамические характеристики САУ.
1. Типовые входные воздействия
В реальных условиях любой объект регулирования подвержен воздействию
1. Типовые входные воздействия
В реальных условиях любой объект регулирования подвержен воздействию
1. Типовые входные воздействия
Для выявления динамических свойств объекта регулирования (ОР) необходимо
1. Типовые входные воздействия
Для выявления динамических свойств объекта регулирования (ОР) необходимо
1. Типовые входные воздействия
Наиболее распространены следующие два вида стандартных (типовых) воздействий:
1. Типовые входные воздействия
Наиболее распространены следующие два вида стандартных (типовых) воздействий:
1. Типовые входные воздействия
И функцию типа «до»: отключение
Примеры: подключение или отключение
1. Типовые входные воздействия
И функцию типа «до»: отключение
Примеры: подключение или отключение
1. Типовые входные воздействия
И функцию типа «до»: отключение
Примеры: подключение или отключение
1. Типовые входные воздействия
И функцию типа «до»: отключение
Примеры: подключение или отключение
1. Типовые входные воздействия
б) единичное импульсное воздействие – это импульс, бесконечно
1. Типовые входные воздействия
б) единичное импульсное воздействие – это импульс, бесконечно
1. Типовые входные воздействия
Единичный импульс – это математическая идеализация предельно короткого
1. Типовые входные воздействия
Единичный импульс – это математическая идеализация предельно короткого
2. Динамические характеристики САУ
До подачи стандартного воздействия объект должен находиться в
2. Динамические характеристики САУ
До подачи стандартного воздействия объект должен находиться в
2. Динамические характеристики САУ
Динамические свойства могут быть представлены в виде:
Дифференциальных уравнений;
Передаточных
2. Динамические характеристики САУ
Динамические свойства могут быть представлены в виде:
Дифференциальных уравнений;
Передаточных
Одной из наиболее часто применяемых форм описания динамических свойств элементов САУ
Одной из наиболее часто применяемых форм описания динамических свойств элементов САУ
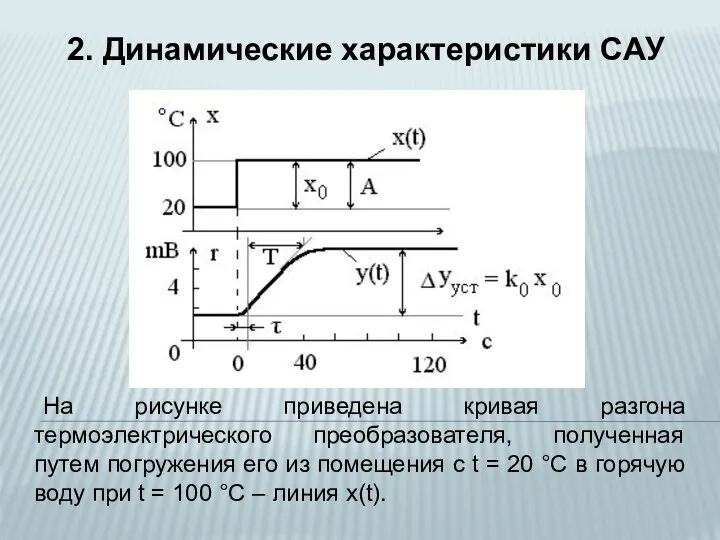
На рисунке приведена кривая разгона термоэлектрического преобразователя, полученная путем погружения его
На рисунке приведена кривая разгона термоэлектрического преобразователя, полученная путем погружения его
2. Динамические свойства САУ
2. Динамические свойства САУ
2. Динамические свойства САУ
Переходные процессы являются универсальным средством изучения динамических свойств
2. Динамические свойства САУ
Переходные процессы являются универсальным средством изучения динамических свойств
2. Динамические свойства САУ
Наиболее широко распространенное свойство инерции промышленных объектов как
2. Динамические свойства САУ
Наиболее широко распространенное свойство инерции промышленных объектов как
2. Динамические свойства САУ
Постоянную времени Т можно найти по графику переходного
2. Динамические свойства САУ
Постоянную времени Т можно найти по графику переходного
2. Динамические свойства САУ
2. Еще одним важным свойством объектов реальных является
2. Динамические свойства САУ
2. Еще одним важным свойством объектов реальных является
2. Динамические свойства САУ
Запаздывание является неблагоприятным свойством объектов с точки зрения
2. Динамические свойства САУ
Запаздывание является неблагоприятным свойством объектов с точки зрения
2. Динамические свойства САУ
Мы рассматривали объекты регулирования, в которых переходные процессы
2. Динамические свойства САУ
Мы рассматривали объекты регулирования, в которых переходные процессы
2. Динамические свойства САУ
Такие объекты довольно редки, значительно чаще встречаются нейтральные
2. Динамические свойства САУ
Такие объекты довольно редки, значительно чаще встречаются нейтральные
2. Динамические свойства САУ
Устойчивые объекты легче поддаются управлению, чем неустойчивые. В
2. Динамические свойства САУ
Устойчивые объекты легче поддаются управлению, чем неустойчивые. В
2. Динамические свойства САУ
Степень самовыравнивания, как отмечалось, характеризует запас устойчивости объекта
2. Динамические свойства САУ
Степень самовыравнивания, как отмечалось, характеризует запас устойчивости объекта
Вопросы для самопроверки:
1) Что такое типовое входное воздействие?
2) Какие
Вопросы для самопроверки:
1) Что такое типовое входное воздействие?
2) Какие
Проверим себя ?
1. Единичная ступенчатая функция типа «до» описывается следующим образом:
А)
Проверим себя ?
1. Единичная ступенчатая функция типа «до» описывается следующим образом:
А)
 Thermometers
Thermometers Волновая оптика. Интерференция света
Волновая оптика. Интерференция света Плоское движение капсулы в атмосфере
Плоское движение капсулы в атмосфере Электрические цепи постоянного тока
Электрические цепи постоянного тока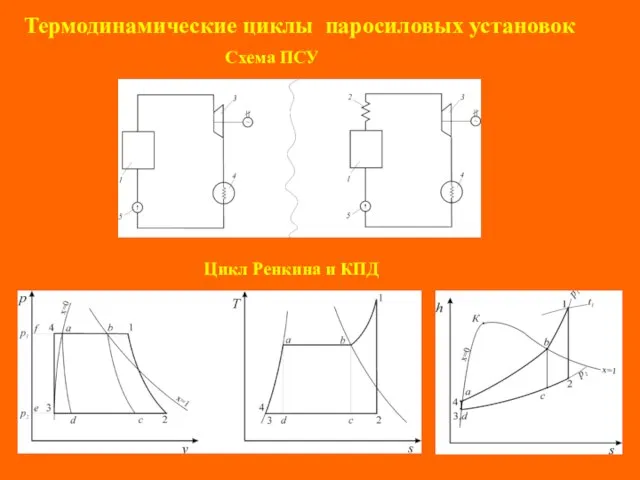 Термодинамические циклы паросиловых установок
Термодинамические циклы паросиловых установок Горение аэрозолей и гибридных смесей Лекция 8 по теории горения и взрыва для гр. ДБЖ-09
Горение аэрозолей и гибридных смесей Лекция 8 по теории горения и взрыва для гр. ДБЖ-09 Теплотехника. Подобие процессов конвективного теплообмена. (Лекция 13)
Теплотехника. Подобие процессов конвективного теплообмена. (Лекция 13) Презентация ЛИНЗЫ
Презентация ЛИНЗЫ Различные типы конденсаторов и их применение
Различные типы конденсаторов и их применение Работа газа и пара при расширении. Тепловые двигатели
Работа газа и пара при расширении. Тепловые двигатели Электропривод в современных технологиях
Электропривод в современных технологиях Размерные цепи
Размерные цепи Философские проблемы науки и техники. Развитие физики от Ньютона до Лагранжа и Якоби. (Лекция 6)
Философские проблемы науки и техники. Развитие физики от Ньютона до Лагранжа и Якоби. (Лекция 6) Аттестационная работа. Технология исследовательской деятельности в преподавании физики в рамках реализации ФГОС
Аттестационная работа. Технология исследовательской деятельности в преподавании физики в рамках реализации ФГОС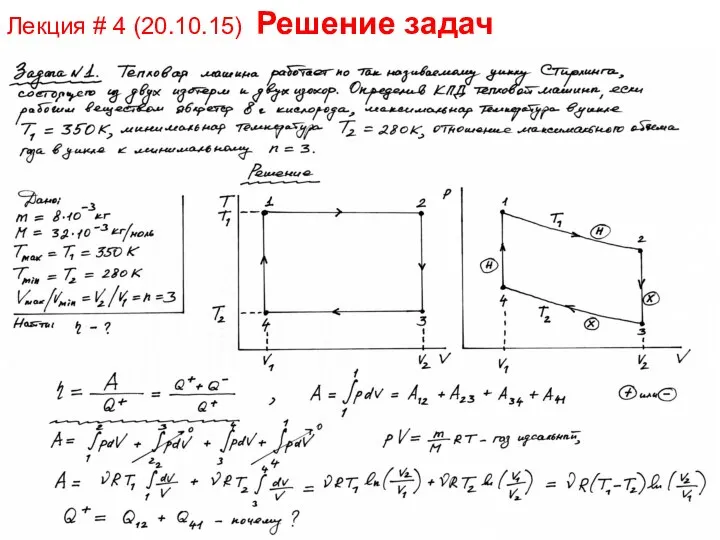 Решение задач. (Лекция 4)
Решение задач. (Лекция 4) Витамин С
Витамин С Проверь себя
Проверь себя Сила Лоренца
Сила Лоренца Презентация по физике "Сила Архимеда" - скачать
Презентация по физике "Сила Архимеда" - скачать  История развития физики. Физика и техника
История развития физики. Физика и техника Электрорадиоматериалы радиоэлектронных средств Лекция 5: Диэлектрики: назначение и область применения
Электрорадиоматериалы радиоэлектронных средств Лекция 5: Диэлектрики: назначение и область применения Устройство и принцип работы выпарного аппарата пленочного типа
Устройство и принцип работы выпарного аппарата пленочного типа Радиация, ее влияние на организм человека.
Радиация, ее влияние на организм человека. Нанотехнологии, как приобретенное направление развития науки в РФ
Нанотехнологии, как приобретенное направление развития науки в РФ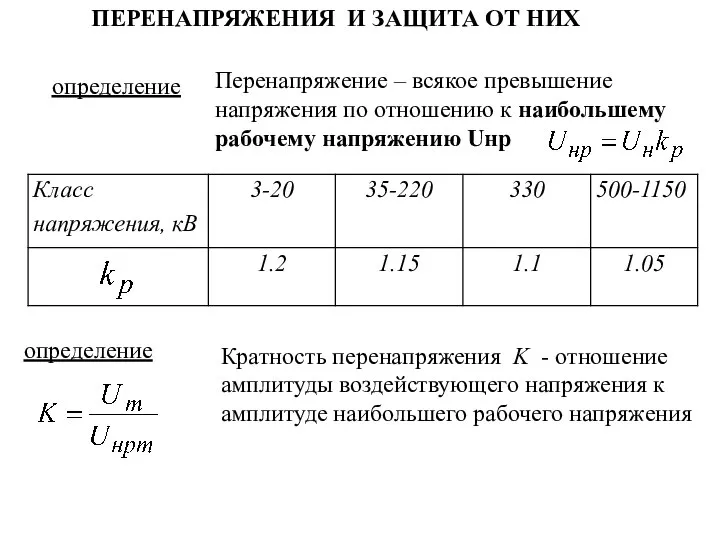 Перенапряжения и защита от них. (Лекция 2.1)
Перенапряжения и защита от них. (Лекция 2.1)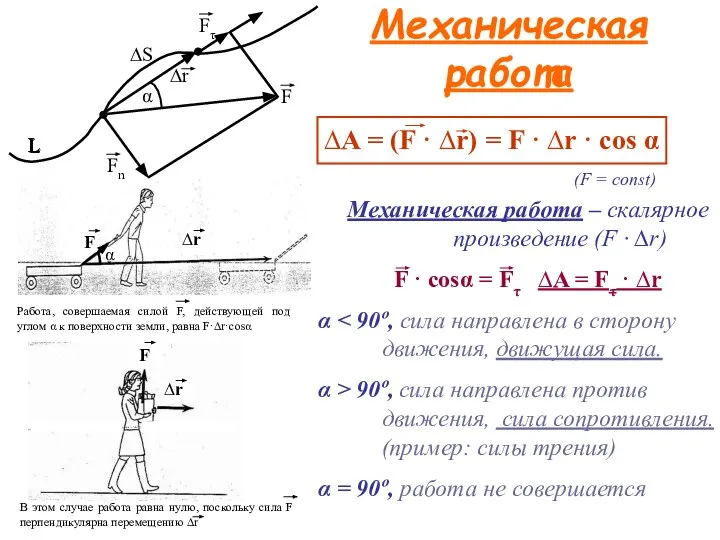 Механическая работа. (Лекция 4)
Механическая работа. (Лекция 4)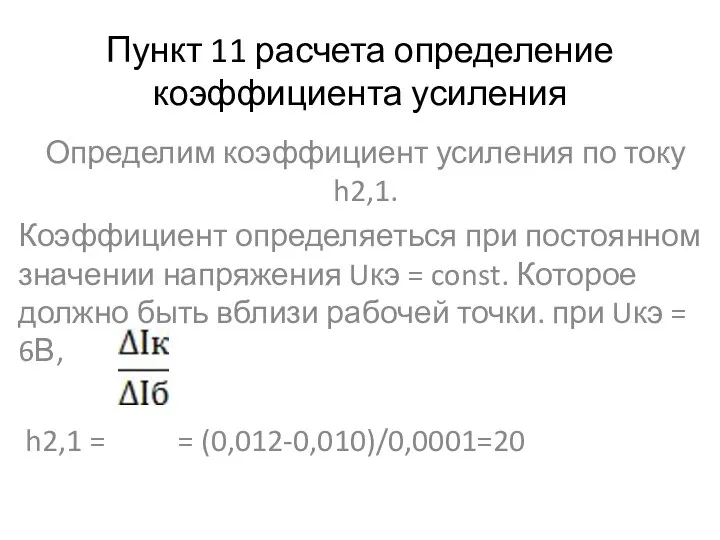 Расчет определения коэффициента усиления
Расчет определения коэффициента усиления Лазер – чудо ХХ века Борисова Мария 2007-2008
Лазер – чудо ХХ века Борисова Мария 2007-2008