- Динамика твердого тела. Лекция 10: Метод кинетостатики

Содержание
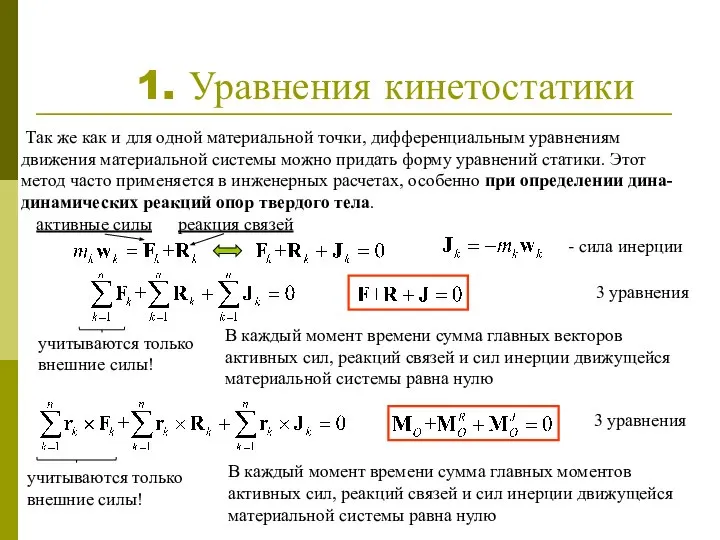
- 2. 1. Уравнения кинетостатики Так же как и для одной материальной точки, дифференциальным уравнениям движения материальной системы
- 3. 2. Уравнения кинетостатики Движение твердого тела вполне определяется шестью уравнениями кинетостатики, точно так же как равновесие
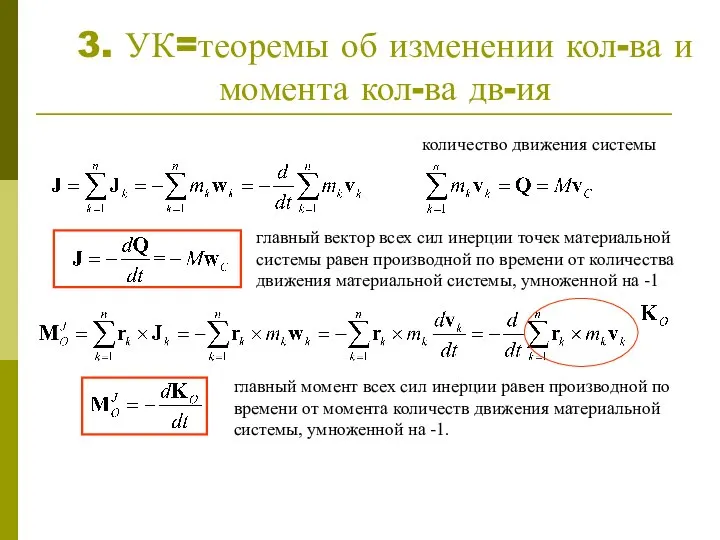
- 4. 3. УК=теоремы об изменении кол-ва и момента кол-ва дв-ия количество движения системы главный вектор всех сил
- 5. 4. Вычисление главного вектора сил инерции ТТ Главный вектор сил инерции твердого тела равен силе инерции
- 6. 5. Вычисление главного момента сил инерции ТТ Система координат Cxyz жестко связана с телом
- 7. 6. Частные случаи 1) Случай плоского движения твердого тела, имеющего плоскость материальной симметрии. Ось z перпендикулярна
- 8. 7. Статические и добавочные динамические реакции статические реакции добавочные динамические реакции уравнения для определения статических реакций
- 9. 8. Пример 1: определение добавочных динам. реакций Статические реакции Дополнительные динамические реакции Силы инерции составляют пару
- 10. 9. Пример 2: несколько тел Груз скользит вниз по наклонной эстакаде, свободно лежащей на земле. Коэффициенты
- 12. Скачать презентацию
1. Уравнения кинетостатики
Так же как и для одной материальной точки,
1. Уравнения кинетостатики
Так же как и для одной материальной точки,
2. Уравнения кинетостатики
Движение твердого тела вполне определяется шестью уравнениями кинетостатики, точно
2. Уравнения кинетостатики
Движение твердого тела вполне определяется шестью уравнениями кинетостатики, точно
3. УК=теоремы об изменении кол-ва и момента кол-ва дв-ия
количество движения системы
главный
3. УК=теоремы об изменении кол-ва и момента кол-ва дв-ия
количество движения системы
главный
4. Вычисление главного вектора сил инерции ТТ
Главный вектор сил инерции твердого
4. Вычисление главного вектора сил инерции ТТ
Главный вектор сил инерции твердого
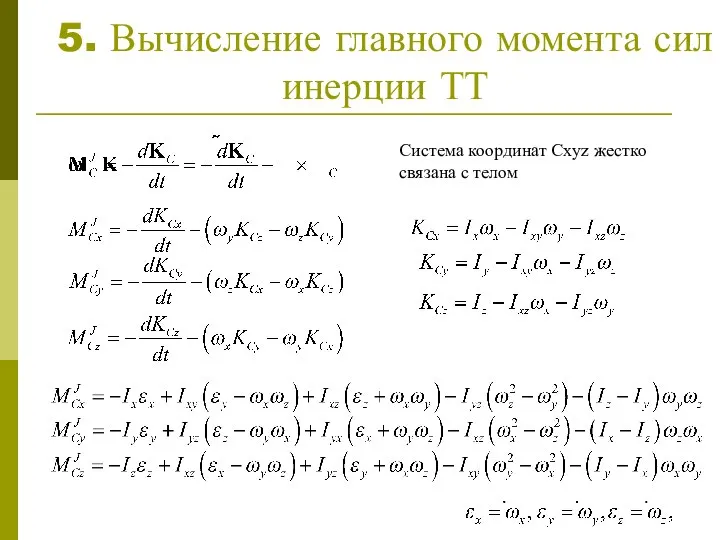
5. Вычисление главного момента сил инерции ТТ
Система координат Cxyz жестко связана
5. Вычисление главного момента сил инерции ТТ
Система координат Cxyz жестко связана
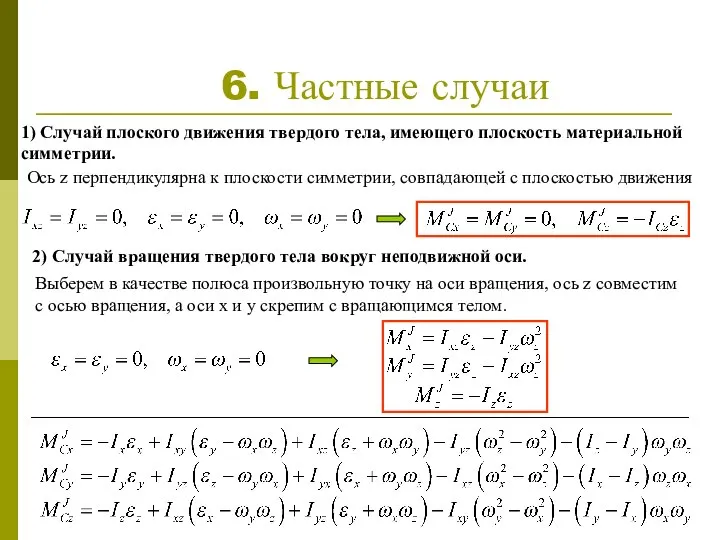
6. Частные случаи
1) Случай плоского движения твердого тела, имеющего плоскость материальной
6. Частные случаи
1) Случай плоского движения твердого тела, имеющего плоскость материальной
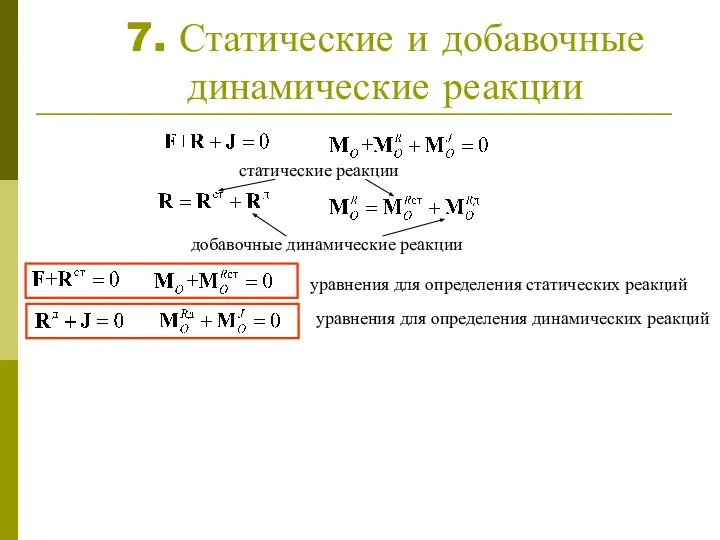
7. Статические и добавочные динамические реакции
статические реакции
добавочные динамические реакции
уравнения для
7. Статические и добавочные динамические реакции
статические реакции
добавочные динамические реакции
уравнения для

8. Пример 1: определение добавочных динам. реакций
Статические реакции
Дополнительные динамические реакции
Силы инерции
8. Пример 1: определение добавочных динам. реакций
Статические реакции
Дополнительные динамические реакции
Силы инерции
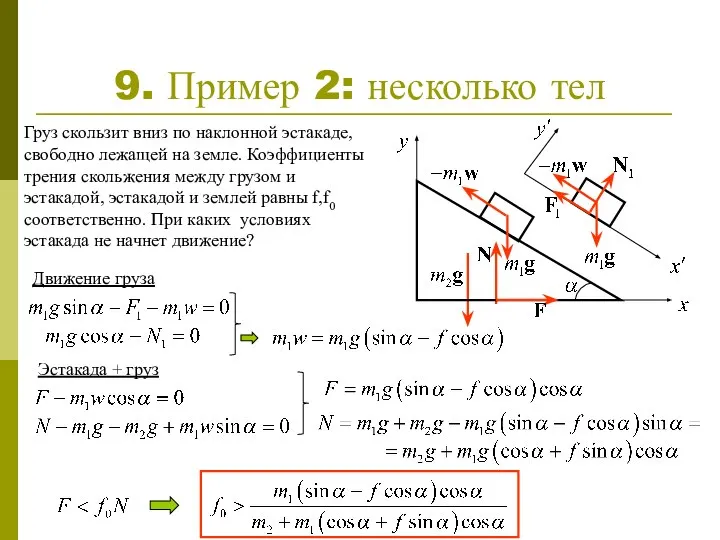
9. Пример 2: несколько тел
Груз скользит вниз по наклонной эстакаде, свободно
9. Пример 2: несколько тел
Груз скользит вниз по наклонной эстакаде, свободно
 Кипение. Удельная теплота парообразования и конденсации
Кипение. Удельная теплота парообразования и конденсации Условия для электростатического поля на границе раздела двух диэлектриков
Условия для электростатического поля на границе раздела двух диэлектриков Конспект по электротехнике (для чайников). Электрическое поле
Конспект по электротехнике (для чайников). Электрическое поле Законы Ньютона
Законы Ньютона Методы расчета статически определимых систем на постоянную нагрузку (продолжение)
Методы расчета статически определимых систем на постоянную нагрузку (продолжение) Электрический ток
Электрический ток 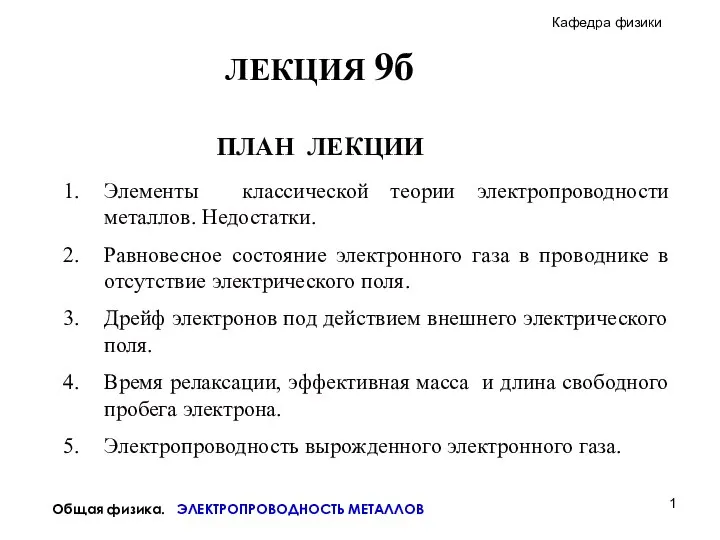 Элементы классической теории металлов. Недостатки электропроводности. (Лекция 9б)
Элементы классической теории металлов. Недостатки электропроводности. (Лекция 9б) Механический этап
Механический этап Физические приборы
Физические приборы Опыты Резерфорда по рассеянию альфа-частиц
Опыты Резерфорда по рассеянию альфа-частиц Напряженное состояние в грунтах. (Лекция 5)
Напряженное состояние в грунтах. (Лекция 5) Теплоотдача при кипении и конденсации. (Лекция 16)
Теплоотдача при кипении и конденсации. (Лекция 16) Презентация по физике Резонансная частота
Презентация по физике Резонансная частота  Componente şi circuite pasive - CCP. (Cursul 1)
Componente şi circuite pasive - CCP. (Cursul 1) Оптика. Электромагнитные волны
Оптика. Электромагнитные волны Оптика. Линзы
Оптика. Линзы Ионизирующее излучение
Ионизирующее излучение Броуновское движение. Диффузия в жидкостях, газах и твердых телах
Броуновское движение. Диффузия в жидкостях, газах и твердых телах Презентация по физике "Тест по физике" - скачать
Презентация по физике "Тест по физике" - скачать  Гидравлика. Основные законы гидростатики и гидродинамики
Гидравлика. Основные законы гидростатики и гидродинамики Лінійні кола
Лінійні кола Выполнение подготовки оборудования к бульдозеру
Выполнение подготовки оборудования к бульдозеру Термографія в медицині
Термографія в медицині Взаимодействие рентгеновского излучения с веществом
Взаимодействие рентгеновского излучения с веществом Презентация МАГНИТНОЕ ПОЛЕ ТОКА
Презентация МАГНИТНОЕ ПОЛЕ ТОКА Физикадағы демонстрациялы тәжрибе және оқытудағы процесстері
Физикадағы демонстрациялы тәжрибе және оқытудағы процесстері Кинематика
Кинематика Фундаментальные опыты в оптике
Фундаментальные опыты в оптике