- Динамика вращения движения твёрдого тела и определение момента инерции маятника Обербека

Содержание
- 2. Цели работы: Проверить, что момент инерции маятника Обербека не зависит от радиуса шкива, на котором подвешен
- 3. Приборы и материалы Крестообразный маятник с 4 грузами, по одному на каждой оси Линейка для измерения
- 4. Маятник
- 5. Используемые закономерности Основное уравнение динамики вращательного движения для маятника Обербека: Iε =Tr Для поступательного движения груза
- 6. Ход работы, 1ч. Закрепить цилиндрические грузики М на середине стержня таким образом, чтобы система находилась в
- 7. Ход работы, 1ч. Измерить время движения t1 груза 5 раз, зафиксировать его, занести данные в табл.
- 8. Таблицы результатов
- 9. Ход работы ч.2 Закрепить нить с грузом m на шкиве радиуса r1 и в дальнейшем эти
- 10. Таблицы результатов
- 11. Обработка результатов измерений I1=0,0413кг*м² I2=0,0412кг*м² I3=0,0248кг*м² I4=0,0798кг*м² Iср=(I1+I2)/2=0,04125кг*м² I4>Iср>I3
- 12. Расчет погрешности измерений ∆tсл=k√(∑ (∆t(i)²)/20) k-коэффицент Стьюдента (2,78 здесь) ∆tинс=0,01 ∆t(i)=√ (∆tинс(i)²+ ∆tсл(i)) t=tср+-∆t
- 13. Расчет погрешности измерений ∆t1сл=0,120 ∆t2сл=0,162 ∆t3сл=0,028 ∆t4сл=0,123 ∆t1=0,120 ∆t2=0,162 ∆t3=0,030 ∆t4=0,123
- 14. Результаты измерений с учетом погрешности t1=3,49±0,120(с) t2=6,92±0,162(с) t3=2,72±0,030(с) t4=4,83±0,123(с)
- 15. Расчет погрешности измерений ∆I=I√((∆m/m)²+4(∆r/r)²+4(∆t/t)²+(∆h/h)²) ∆I1=0,0028(кг*м²) ∆I2=0,0018(кг*м²) ∆I3=0,0002(кг*м²) ∆I4=0,0037(кг*м²)
- 16. Расчет погрешностей измерений ∆I’=0,5√(∆I1²+ ∆I2²)=0,00162(кг*м²) Итого: I=0,04125±0,00162(кг*м²) Относительная погрешность: δ= ∆I’/I’=0,039
- 17. Выводы: Экспериментальным путем на примере маятника Обербека доказано, что момент инерции тела не зависит от момента
- 19. Скачать презентацию
Цели работы:
Проверить, что момент инерции маятника Обербека не зависит от радиуса
Цели работы:
Проверить, что момент инерции маятника Обербека не зависит от радиуса
Приборы и материалы
Крестообразный маятник с 4 грузами, по одному на каждой
Приборы и материалы
Крестообразный маятник с 4 грузами, по одному на каждой

Маятник
Маятник
Используемые закономерности
Основное уравнение динамики вращательного движения для маятника Обербека: Iε =Tr
Для
Используемые закономерности
Основное уравнение динамики вращательного движения для маятника Обербека: Iε =Tr
Для
Ход работы, 1ч.
Закрепить цилиндрические грузики М на середине стержня таким образом,
Ход работы, 1ч.
Закрепить цилиндрические грузики М на середине стержня таким образом,
Ход работы, 1ч.
Измерить время движения t1 груза 5 раз, зафиксировать его,
Ход работы, 1ч.
Измерить время движения t1 груза 5 раз, зафиксировать его,
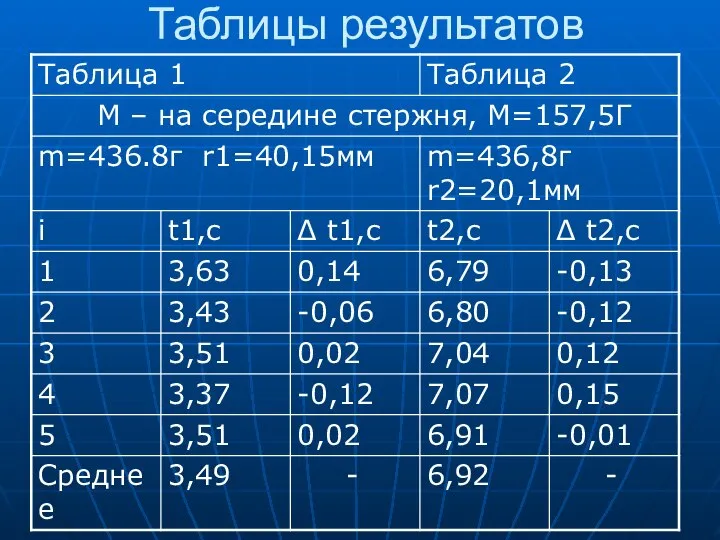
Таблицы результатов
Таблицы результатов
Ход работы ч.2
Закрепить нить с грузом m на шкиве радиуса r1
Ход работы ч.2
Закрепить нить с грузом m на шкиве радиуса r1
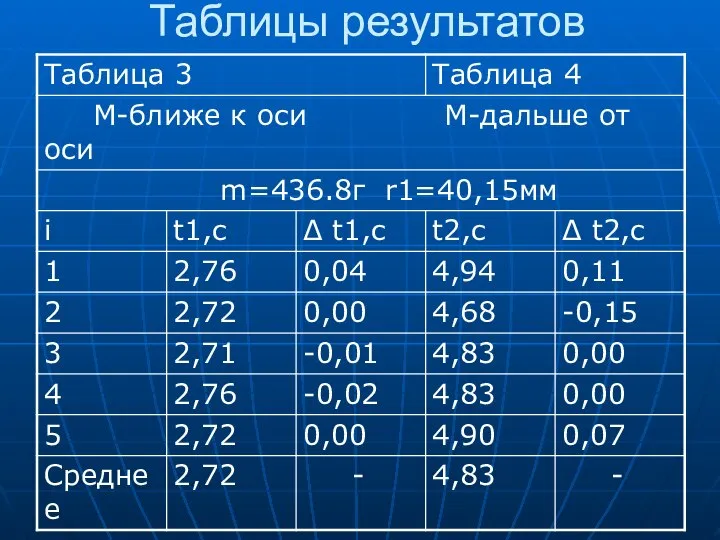
Таблицы результатов
Таблицы результатов
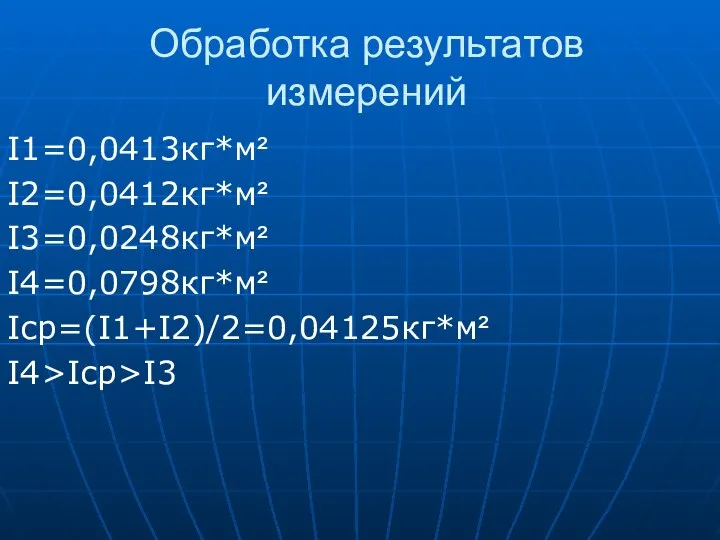
Обработка результатов измерений
I1=0,0413кг*м²
I2=0,0412кг*м²
I3=0,0248кг*м²
I4=0,0798кг*м²
Iср=(I1+I2)/2=0,04125кг*м²
I4>Iср>I3
Обработка результатов измерений
I1=0,0413кг*м²
I2=0,0412кг*м²
I3=0,0248кг*м²
I4=0,0798кг*м²
Iср=(I1+I2)/2=0,04125кг*м²
I4>Iср>I3
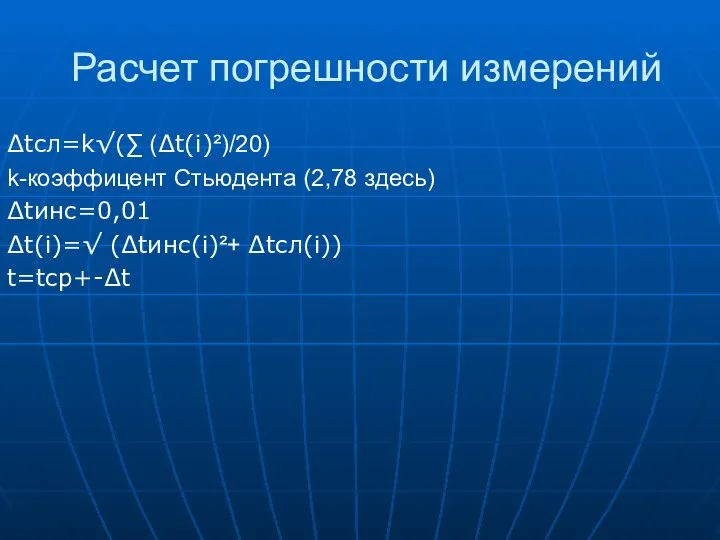
Расчет погрешности измерений
∆tсл=k√(∑ (∆t(i)²)/20)
k-коэффицент Стьюдента (2,78 здесь)
∆tинс=0,01
∆t(i)=√ (∆tинс(i)²+ ∆tсл(i))
t=tср+-∆t
Расчет погрешности измерений
∆tсл=k√(∑ (∆t(i)²)/20)
k-коэффицент Стьюдента (2,78 здесь)
∆tинс=0,01
∆t(i)=√ (∆tинс(i)²+ ∆tсл(i))
t=tср+-∆t
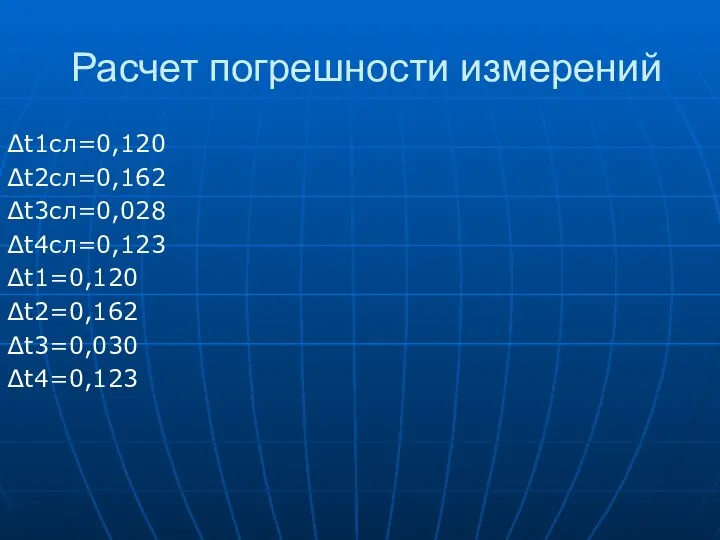
Расчет погрешности измерений
∆t1сл=0,120
∆t2сл=0,162
∆t3сл=0,028
∆t4сл=0,123
∆t1=0,120
∆t2=0,162
∆t3=0,030
∆t4=0,123
Расчет погрешности измерений
∆t1сл=0,120
∆t2сл=0,162
∆t3сл=0,028
∆t4сл=0,123
∆t1=0,120
∆t2=0,162
∆t3=0,030
∆t4=0,123
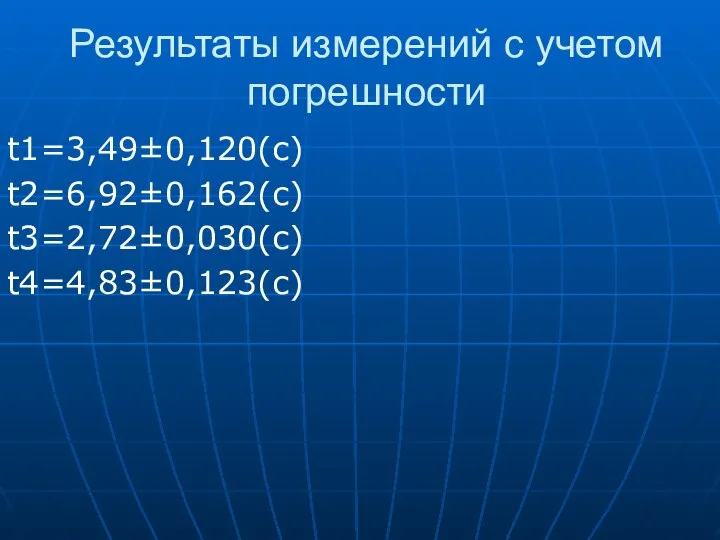
Результаты измерений с учетом погрешности
t1=3,49±0,120(с)
t2=6,92±0,162(с)
t3=2,72±0,030(с)
t4=4,83±0,123(с)
Результаты измерений с учетом погрешности
t1=3,49±0,120(с)
t2=6,92±0,162(с)
t3=2,72±0,030(с)
t4=4,83±0,123(с)
Расчет погрешности измерений
∆I=I√((∆m/m)²+4(∆r/r)²+4(∆t/t)²+(∆h/h)²)
∆I1=0,0028(кг*м²)
∆I2=0,0018(кг*м²)
∆I3=0,0002(кг*м²)
∆I4=0,0037(кг*м²)
Расчет погрешности измерений
∆I=I√((∆m/m)²+4(∆r/r)²+4(∆t/t)²+(∆h/h)²)
∆I1=0,0028(кг*м²)
∆I2=0,0018(кг*м²)
∆I3=0,0002(кг*м²)
∆I4=0,0037(кг*м²)
Расчет погрешностей измерений
∆I’=0,5√(∆I1²+ ∆I2²)=0,00162(кг*м²)
Итого:
I=0,04125±0,00162(кг*м²)
Относительная погрешность:
δ= ∆I’/I’=0,039
Расчет погрешностей измерений
∆I’=0,5√(∆I1²+ ∆I2²)=0,00162(кг*м²)
Итого:
I=0,04125±0,00162(кг*м²)
Относительная погрешность:
δ= ∆I’/I’=0,039
Выводы:
Экспериментальным путем на примере маятника Обербека доказано, что момент инерции тела
Выводы:
Экспериментальным путем на примере маятника Обербека доказано, что момент инерции тела
 Презентация по физике "Закон ома для цепи" - скачать
Презентация по физике "Закон ома для цепи" - скачать  Що таке насос і хто його винайшов
Що таке насос і хто його винайшов Закон всемирного тяготения
Закон всемирного тяготения Электрический ток в полупроводниках
Электрический ток в полупроводниках Работа и мощность электрического тока
Работа и мощность электрического тока Намагничивание и размагничивание деталей при магнитном методе контроля
Намагничивание и размагничивание деталей при магнитном методе контроля Электростатическое поле в вакууме
Электростатическое поле в вакууме Презентация по физике "Миражи" - скачать
Презентация по физике "Миражи" - скачать  Инфракрасные, ультрафиолетовые, лазерные излучения и способы защиты
Инфракрасные, ультрафиолетовые, лазерные излучения и способы защиты Решение задач по физике 10 класс
Решение задач по физике 10 класс Хочешь стать отличником? «Основы молекулярно-кинетической теории» Автор: Богомолова Н.В. учитель физики МОУ СОШ № 3 г. Бийска Алт
Хочешь стать отличником? «Основы молекулярно-кинетической теории» Автор: Богомолова Н.В. учитель физики МОУ СОШ № 3 г. Бийска Алт Расчет количества светильников
Расчет количества светильников Магнитное поле
Магнитное поле Дисперсія та поляризація світла
Дисперсія та поляризація світла  Гидроэлектростанции (ГЭС)
Гидроэлектростанции (ГЭС)  Сравнительный анализ современных сертифицированных средств защиты от утечки информации
Сравнительный анализ современных сертифицированных средств защиты от утечки информации Процессы и аппараты пищевых производств. (Лекция 4)
Процессы и аппараты пищевых производств. (Лекция 4) Строение и эволюция Вселенной
Строение и эволюция Вселенной Машиноведение. История, устройство и использование швейных машин
Машиноведение. История, устройство и использование швейных машин Электризация тел. Электрический заряд. Взаимодействие зарядов
Электризация тел. Электрический заряд. Взаимодействие зарядов Личности в истории науки и техники Автор: Акимцева Александра Семеновна Средне-Лопатинская ООШ
Личности в истории науки и техники Автор: Акимцева Александра Семеновна Средне-Лопатинская ООШ  Лекция 3
Лекция 3  Волновые свойства света
Волновые свойства света Звук и его характеристики
Звук и его характеристики Интерференция. Дифракция. Мясникова Г. И. Учитель физики
Интерференция. Дифракция. Мясникова Г. И. Учитель физики Теплоенергетика. Типи теплових електростанцій
Теплоенергетика. Типи теплових електростанцій Презентация по физике "Безпека людини під час роботи з електричними приладами і пристроями" - скачать бесплатно
Презентация по физике "Безпека людини під час роботи з електричними приладами і пристроями" - скачать бесплатно Герценовский Универстет. Факультет Физики
Герценовский Универстет. Факультет Физики