- Экспериментальные методы морской гидромеханики

Содержание
- 2. Методы и средства модельных исследований мореходных качеств судна Методы математического моделирования не позволяют во всех деталях
- 3. • • • • Определение сопротивления Испытания винта в открытой воде Самоходные испытания Испытания в кавитационной
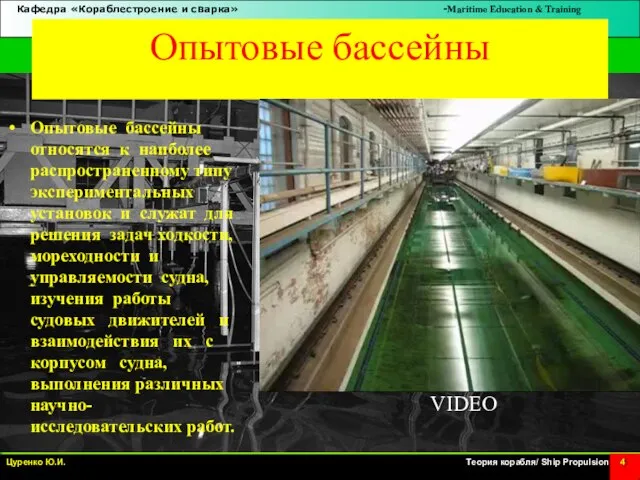
- 4. Опытовые бассейны Опытовые бассейны относятся к наиболее распространенному типу экспериментальных установок и служат для решения задач
- 5. В зависимости от решаемых задач различают глубоководные, мелководные и скоростные бассейны. В ряде случаев глубоководные бассейны
- 7. Характеристики опытовых бассейнов Глубоководный опытовый бассейн Предназначен для проведения буксировочных и самоходных испытаний надводных и подводных
- 8. Характеристики опытовых бассейнов Бассейн У. Фруда
- 9. Характеристики опытовых бассейнов длина - 50,0 м; ширина - 5,0 м; высота борта - 3,0 м;
- 10. Опытовый_бассейн_СПГУВК,_общий_вид
- 11. Крепление_модели_под_тележкой_бассейна_СПГУВК
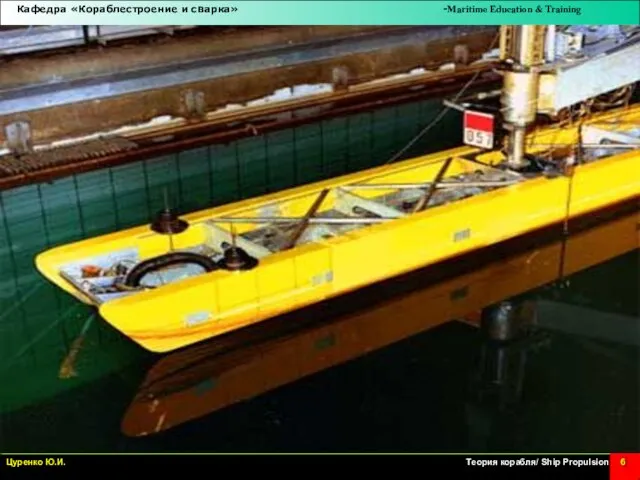
- 12. Буксировочная_тележка_опытового_бассейна_СПГУВК
- 15. Определение сопротивления • Процедура: – Модель разгоняется до нужной скорости –Скорость удерживается постоянной более 10 секунд
- 16. Определение сопротивления VIDEO
- 17. [N] Tm Сопротивление R Рекомендованная процедура измерений • Сопротивление может значительно колебаться, особенно у моделей с
- 18. Сопротивление модели RTm[N] Скорость модели[м/с] Пример записи данных одного пробега -40 -20 0 160 140 120
- 19. Сейши – стоячие волны в бассейне Амплитуда ζa ) ω Длина бассейна Ltank Горизонтальная скорость Vx
- 20. Сейши – стоячие волны в бассейне VIDEO
- 21. Погрешности в измерениях от стоячих волн - Пример для крупных бассейнов: Амплитуда волны = 1 cм
- 22. Время выдержки между пробегами • Волны на поверхности должны исчезнуть – Время ожидания можно уменьшить с
- 23. Определение сопротивления скоростных моделей
- 24. Определение сопротивления скоростных моделей VIDEO
- 25. Испытания модели СПК VIDEO
- 26. Испытания движителей в открытой воде • Винт (или другой движитель) испытывается в открытой воде - В
- 27. Испытания движителей в открытой воде
- 28. Испытания движителей в открытой воде VIDEO
- 29. Испытания движителей в открытой воде - Измерительное оборудование Скорость воды V ИЗМЕРЯЕМ : Момент Q Упор
- 30. Испытания движителей в открытой воде - Процедура измерений • • • • • Обороты винта постоянны
- 31. Подтягивание FD Пропульсивные испытания • Процедура (Континентальный или Русский метод): – Модель разгоняем до требуемой скорости
- 32. Пропульсивные испытания (Британский метод) • Имерения те-же, но: Измеряем силу подтягивания • Процедура испытаний (British method):
- 33. Гидродинамические лотки построены на принципе обращения движения и представляют собой замкнутые резервуары в виде кольцевой трубы
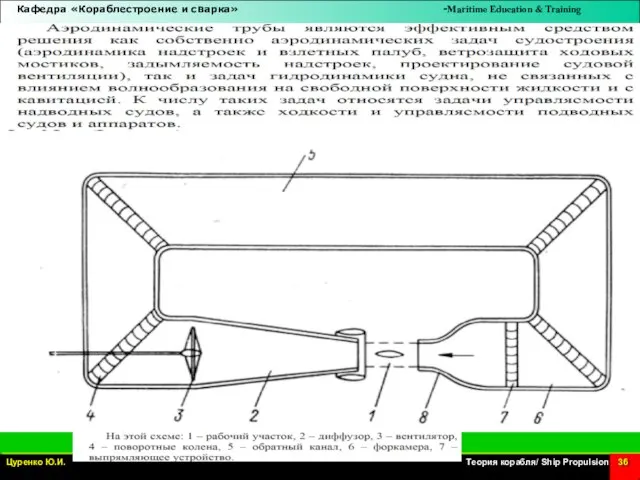
- 34. Аэродинамические испытания
- 37. ПЛ «Альбакор» Испытания модели ПЛ в аэродинамической трубе
- 38. Кавитационные испытания • Назначение: – Прогнозирование кавитационной эрозии – Влияние кавитации на к.п.д. – Вибрация и
- 39. Кавитационные испытания VIDEO
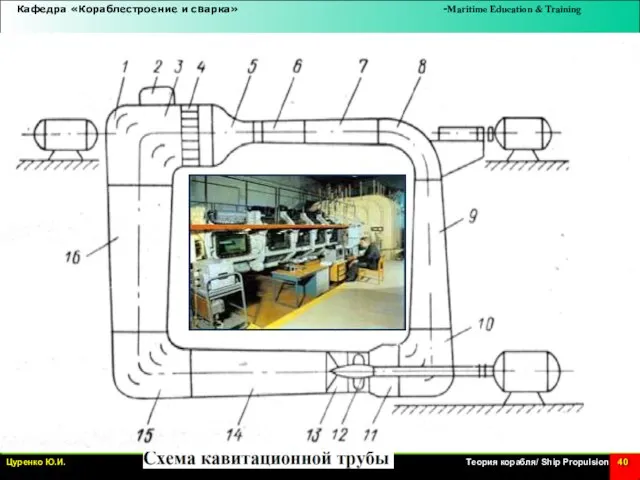
- 42. КАВИТАЦИЯ
- 43. Кавитация на винтах и рулях
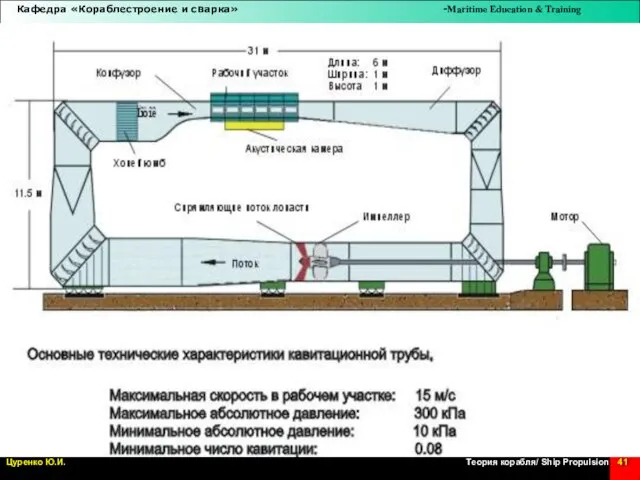
- 44. Проведение кавитационных тестов: 1. 2. 3. 4. Назначается скорость потока в рабочей части кавитационной трубы, соответствующая
- 45. 24 Модель кормы в кавитационной трубе
- 46. 352 0 345 7 30 15 45 33 0 22 5 14 3 15 165 0
- 47. Измеряем при кавитационных испытаниях: • Число оборотов – тахометром • • • • • • Упор
- 48. Измерения: Трубка Пито-Прандтля Статическое давление Мембрана ВАЛ Индукционный датчик Для измерения упора Упор Момент Тензометр Для
- 50. Подводная ракета «ШКВАЛ» VIDEO
- 51. Маневренные испытания • Две альтернативных цели: Прямая проверка маневренности - выполнение критериев ИМО 2. Определение гидродинамических
- 52. Виды маневренных испытаний • IMO standard maneuvers (Стандартные тесты ИМО): – Zig-zag (Зиг-Заг) • 10º/ 10º
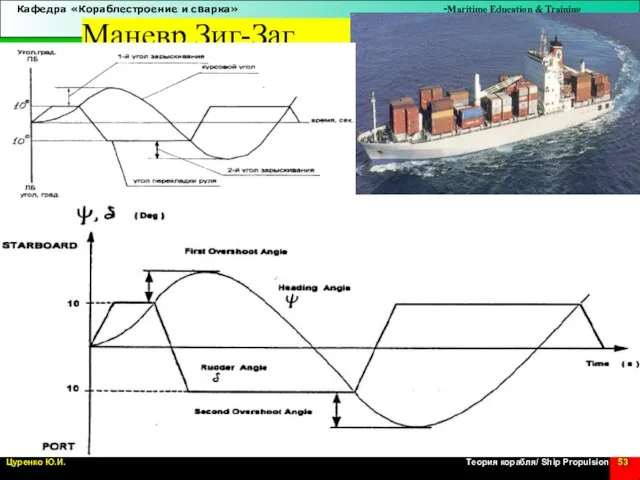
- 53. Маневр Зиг-Заг
- 54. Маневр Зиг-Заг Испытание на зигзаг 10°/10° выполняется посредством перекладки руля на 10° поочередно на каждый борт
- 55. Маневр выхода на циркуляцию
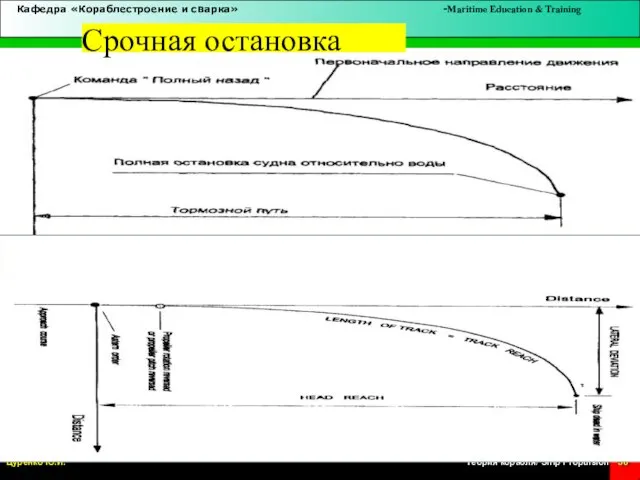
- 56. Срочная остановка
- 57. Срочная остановка
- 58. Самоходные Маневренные Испытания • • • Полное геометрическое подобие Скорости моделируются по числу Фруда Влияние масштабного
- 59. - ИЗМЕРЯЕМ: • • • • • Число оборотов винта Углы перекладки рулей Скорость Сигналы на
- 60. Самоходные испытания VIDEO
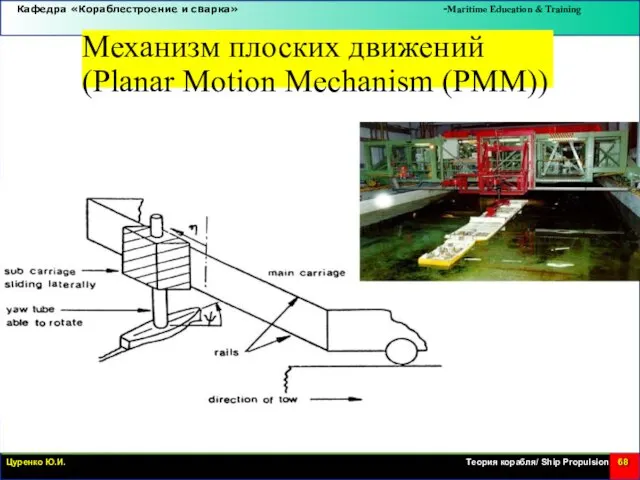
- 61. 39 Маневренные испытания с закрепленными моделями • Механизм плоских движений (Planar Motion Mechanism (PMM)) • Циркуляционный
- 62. Штормовой бассейн
- 63. Штормовой бассейн
- 64. Штормовой бассейн
- 65. Штормовой бассейн
- 66. Испытания на регулярном волнении. Параметрическая качка VIDEO
- 67. Ледовые исытания VIDEO
- 68. Механизм плоских движений (Planar Motion Mechanism (PMM))
- 69. Механизм плоских движений Planar Motion Mechanism VIDEO
- 70. Тест рыскания Рыскание и дрейф Рыскание и перекладка руля
- 71. Опытовые бассейны с ротативными установками служат для моделирования движения судна по криволинейной траектории, чаще всего –
- 72. Циркуляционный бассейн (Ротативная установка) • • • Устанавливаем: – Скорость вращения – Радиус вращения модели –
- 73. Испытания модели с фиксированным углом дрейфа • • • • Модель буксируется в бассейне с фиксированным
- 74. ТРЕБОВАНИЯ К МАНЕВРЕННЫМ ХАРАКТЕРИСТИКАМ .1 Поворотливость. При выполнении маневра на циркуляцию выдвиг не должен превышать 4,5
- 75. МКОБ: Международная Конференция Опытовых Бассейнов ITTC: International Towing Tank Conference • • • • • The
- 77. Скачать презентацию
Методы и средства
модельных исследований
мореходных качеств судна
Методы математического моделирования не
Методы и средства
модельных исследований
мореходных качеств судна
Методы математического моделирования не

•
•
•
•
Определение сопротивления
Испытания винта в открытой воде
Самоходные испытания
Испытания в кавитационной трубе
–
–
–
–
Определение кавитации
Пульсации
•
•
•
•
Определение сопротивления
Испытания винта в открытой воде
Самоходные испытания
Испытания в кавитационной трубе
–
–
–
–
Определение кавитации
Пульсации
Опытовые бассейны
Опытовые бассейны относятся к наиболее распространенному типу экспериментальных установок и
Опытовые бассейны
Опытовые бассейны относятся к наиболее распространенному типу экспериментальных установок и
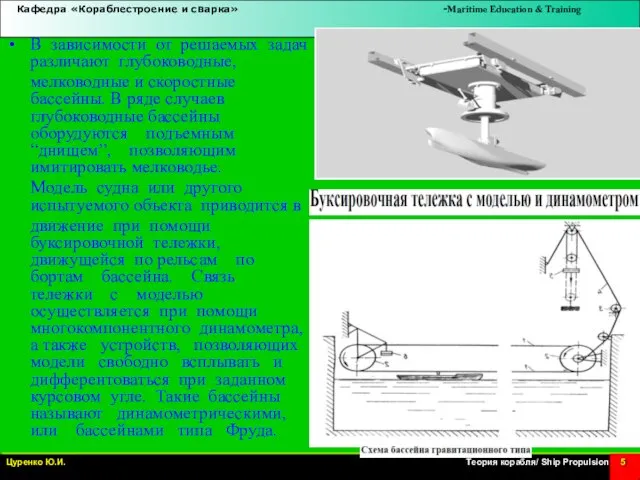
В зависимости от решаемых задач различают глубоководные,
мелководные и скоростные бассейны. В
В зависимости от решаемых задач различают глубоководные,
мелководные и скоростные бассейны. В

Характеристики опытовых бассейнов
Глубоководный опытовый бассейн
Предназначен для проведения буксировочных и самоходных испытаний надводных
Характеристики опытовых бассейнов
Глубоководный опытовый бассейн
Предназначен для проведения буксировочных и самоходных испытаний надводных
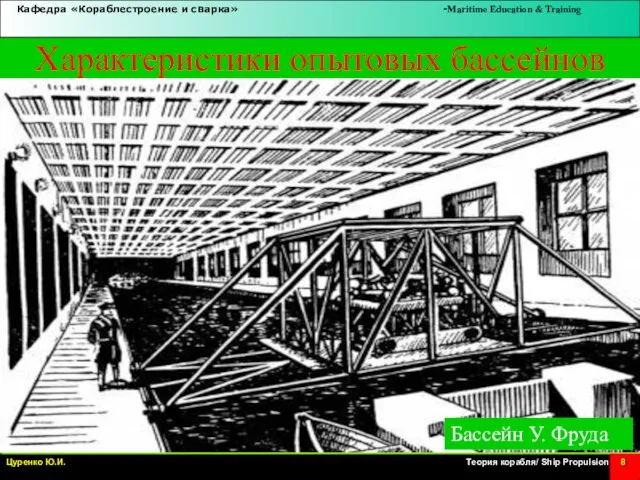
Характеристики опытовых бассейнов
Бассейн У. Фруда
Характеристики опытовых бассейнов
Бассейн У. Фруда
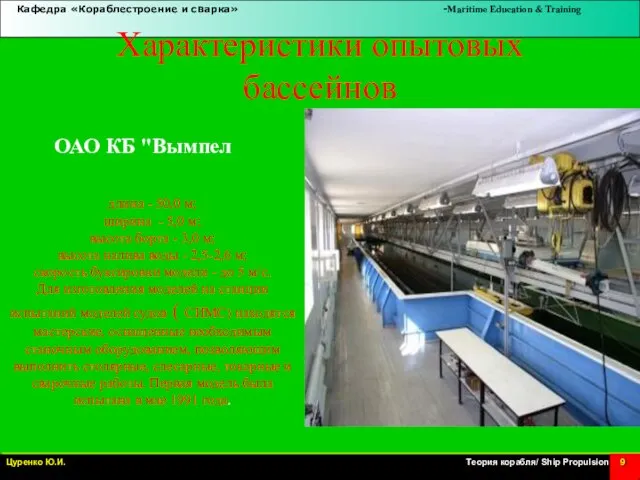
Характеристики опытовых бассейнов
длина - 50,0 м;
ширина - 5,0 м;
высота борта -
Характеристики опытовых бассейнов
длина - 50,0 м;
ширина - 5,0 м;
высота борта -

Опытовый_бассейн_СПГУВК,_общий_вид
Опытовый_бассейн_СПГУВК,_общий_вид

Крепление_модели_под_тележкой_бассейна_СПГУВК
Крепление_модели_под_тележкой_бассейна_СПГУВК

Буксировочная_тележка_опытового_бассейна_СПГУВК
Буксировочная_тележка_опытового_бассейна_СПГУВК

Определение сопротивления
• Процедура:
– Модель разгоняется до нужной скорости
–Скорость удерживается постоянной более
Определение сопротивления
• Процедура:
– Модель разгоняется до нужной скорости
–Скорость удерживается постоянной более
Определение сопротивления
VIDEO
Определение сопротивления
VIDEO
![[N] Tm Сопротивление R Рекомендованная процедура измерений • Сопротивление может значительно](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/501029/slide-16.jpg)
[N]
Tm
Сопротивление R
Рекомендованная процедура измерений
• Сопротивление может значительно колебаться, особенно у моделей
с
[N]
Tm
Сопротивление R
Рекомендованная процедура измерений
• Сопротивление может значительно колебаться, особенно у моделей
с
![Сопротивление модели RTm[N] Скорость модели[м/с] Пример записи данных одного пробега -40](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/501029/slide-17.jpg)
Сопротивление модели RTm[N]
Скорость модели[м/с]
Пример записи данных одного пробега
-40
-20
0
160
140
120
100
80
60
40
20
0
10
20
30
40
50
60
Время [секунды]
-0.5
0
2.5
2
1.5
1
0.5
RTm
Скорость
Сопротивление модели RTm[N]
Скорость модели[м/с]
Пример записи данных одного пробега
-40
-20
0
160
140
120
100
80
60
40
20
0
10
20
30
40
50
60
Время [секунды]
-0.5
0
2.5
2
1.5
1
0.5
RTm
Скорость
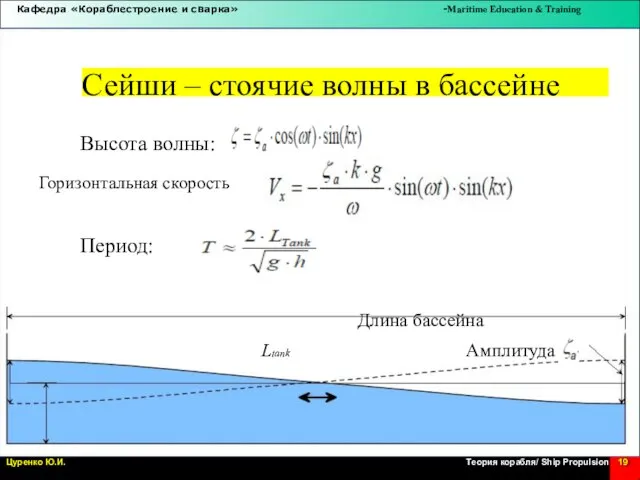
Сейши – стоячие волны в бассейне
Амплитуда ζa
)
ω
Длина бассейна Ltank
Горизонтальная скорость Vx
Высота
Сейши – стоячие волны в бассейне
Амплитуда ζa
)
ω
Длина бассейна Ltank
Горизонтальная скорость Vx
Высота
Сейши – стоячие волны в бассейне
VIDEO
Сейши – стоячие волны в бассейне
VIDEO
Погрешности в измерениях от стоячих волн
- Пример для крупных бассейнов:
Амплитуда волны
Погрешности в измерениях от стоячих волн
- Пример для крупных бассейнов:
Амплитуда волны
Время выдержки между пробегами
• Волны на поверхности должны исчезнуть
– Время ожидания
Время выдержки между пробегами
• Волны на поверхности должны исчезнуть
– Время ожидания
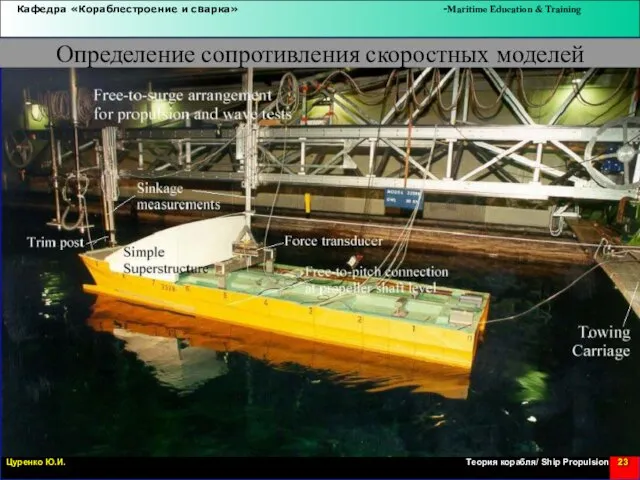
Определение сопротивления скоростных моделей
Определение сопротивления скоростных моделей

Определение сопротивления скоростных моделей
VIDEO
Определение сопротивления скоростных моделей
VIDEO
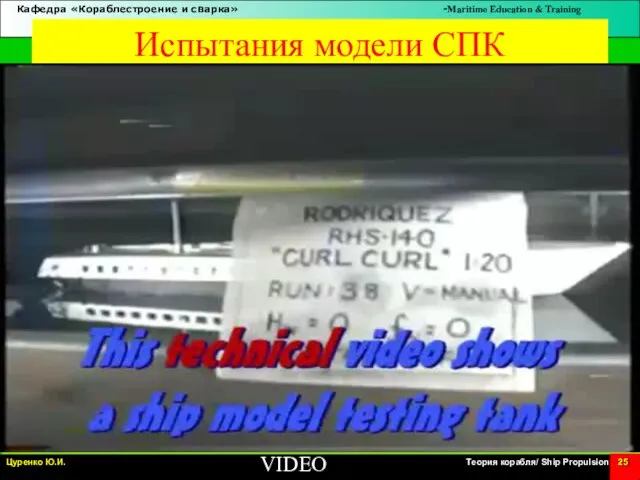
Испытания модели СПК
VIDEO
Испытания модели СПК
VIDEO
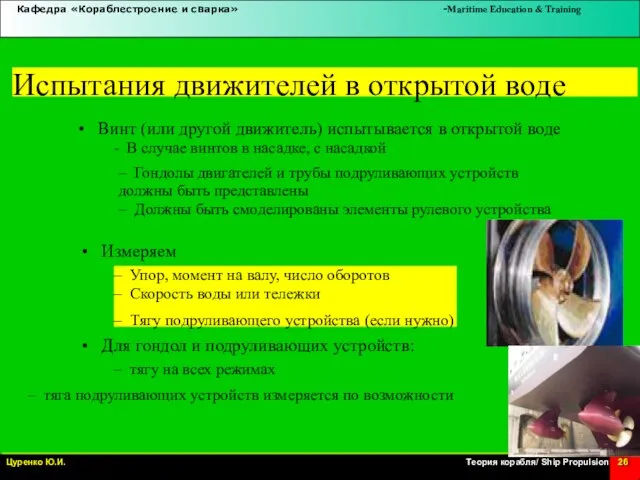
Испытания движителей в открытой воде
• Винт (или другой движитель) испытывается в
Испытания движителей в открытой воде
• Винт (или другой движитель) испытывается в

Испытания движителей в открытой воде
Испытания движителей в открытой воде

Испытания движителей в открытой воде
VIDEO
Испытания движителей в открытой воде
VIDEO
Испытания движителей в открытой воде
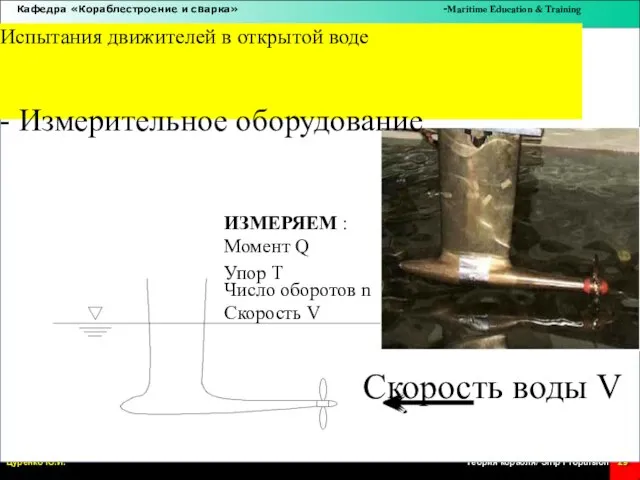
- Измерительное оборудование
Скорость воды V
ИЗМЕРЯЕМ :
Момент Q
Упор
Испытания движителей в открытой воде
- Измерительное оборудование
Скорость воды V
ИЗМЕРЯЕМ :
Момент Q
Упор
Испытания движителей в открытой воде
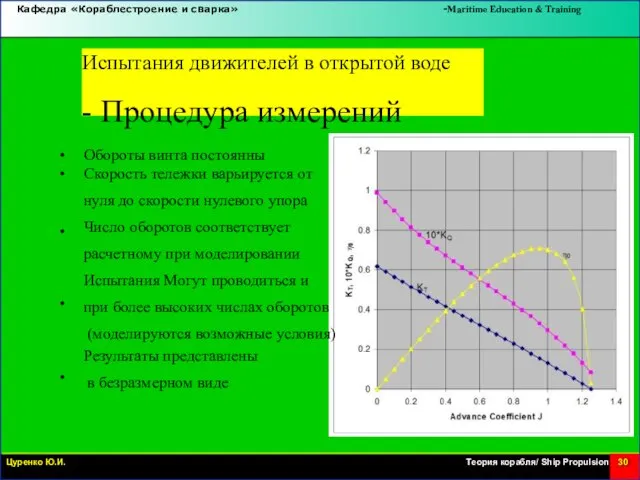
- Процедура измерений
•
•
•
•
•
Обороты винта постоянны
Скорость тележки варьируется
Испытания движителей в открытой воде
- Процедура измерений
•
•
•
•
•
Обороты винта постоянны
Скорость тележки варьируется
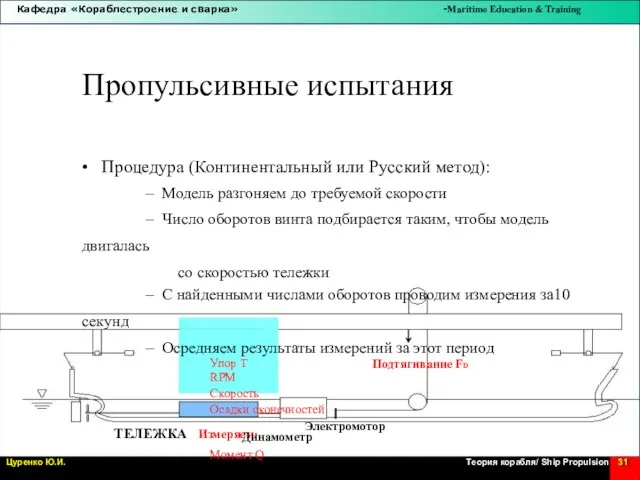
Подтягивание FD
Пропульсивные испытания
• Процедура (Континентальный или Русский метод):
– Модель разгоняем до
Подтягивание FD
Пропульсивные испытания
• Процедура (Континентальный или Русский метод):
– Модель разгоняем до
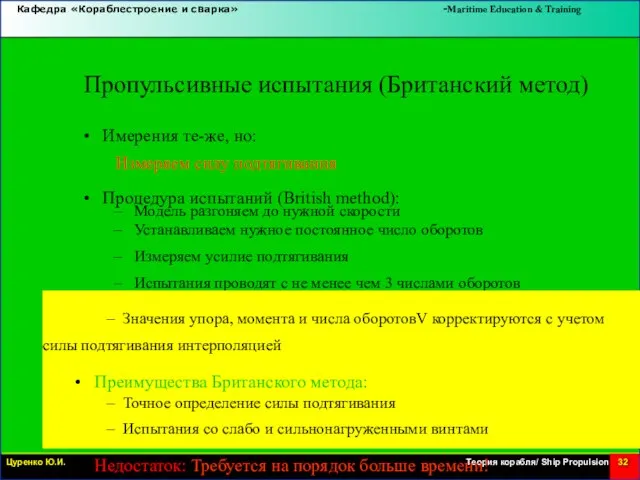
Пропульсивные испытания (Британский метод)
• Имерения те-же, но:
Измеряем силу подтягивания
• Процедура испытаний
Пропульсивные испытания (Британский метод)
• Имерения те-же, но:
Измеряем силу подтягивания
• Процедура испытаний
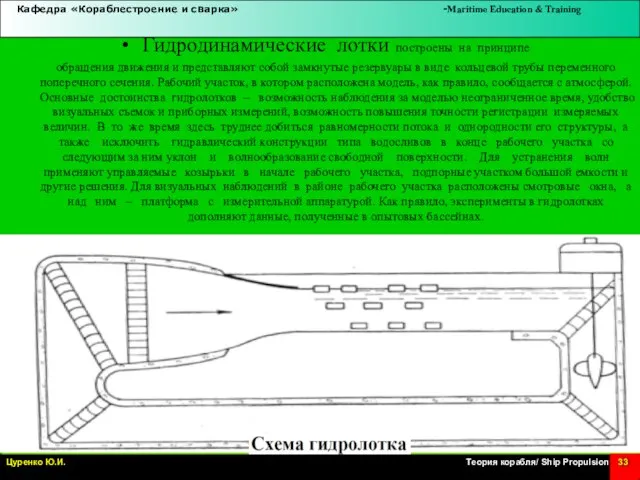
Гидродинамические лотки построены на принципе
обращения движения и представляют собой замкнутые резервуары
Гидродинамические лотки построены на принципе
обращения движения и представляют собой замкнутые резервуары

Аэродинамические испытания
Аэродинамические испытания

ПЛ «Альбакор»
Испытания модели ПЛ в аэродинамической трубе
ПЛ «Альбакор»
Испытания модели ПЛ в аэродинамической трубе
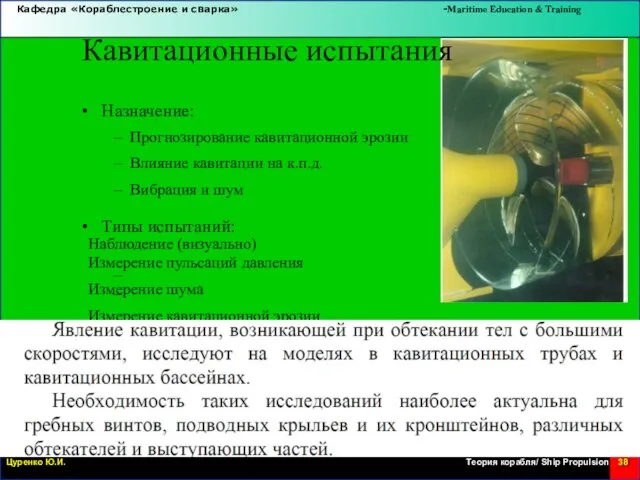
Кавитационные испытания
• Назначение:
– Прогнозирование кавитационной эрозии
– Влияние кавитации на к.п.д.
– Вибрация
Кавитационные испытания
• Назначение:
– Прогнозирование кавитационной эрозии
– Влияние кавитации на к.п.д.
– Вибрация

Кавитационные испытания
VIDEO
Кавитационные испытания
VIDEO

КАВИТАЦИЯ
КАВИТАЦИЯ

Кавитация на винтах и рулях
Кавитация на винтах и рулях
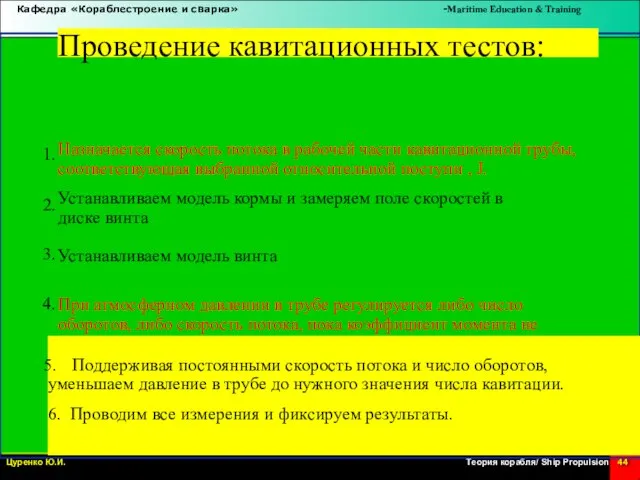
Проведение кавитационных тестов:
1.
2.
3.
4.
Назначается скорость потока в рабочей части кавитационной трубы,
соответствующая выбранной
Проведение кавитационных тестов:
1.
2.
3.
4.
Назначается скорость потока в рабочей части кавитационной трубы,
соответствующая выбранной

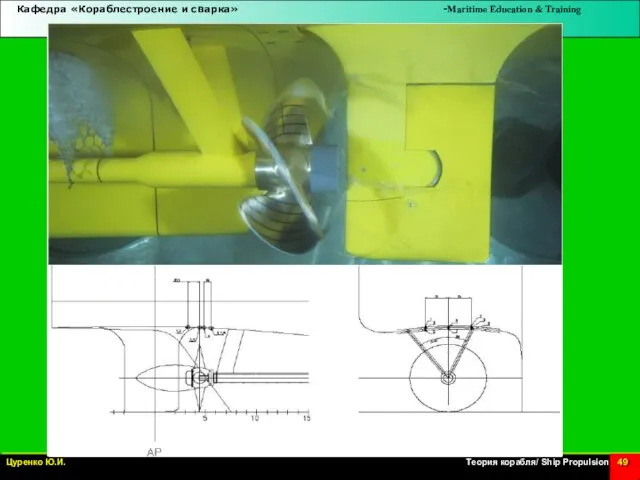
24
Модель кормы в кавитационной трубе
24
Модель кормы в кавитационной трубе
352
0
345
7
30
15
45
33
0
22
5
14
3
15
165
0
157
195
180
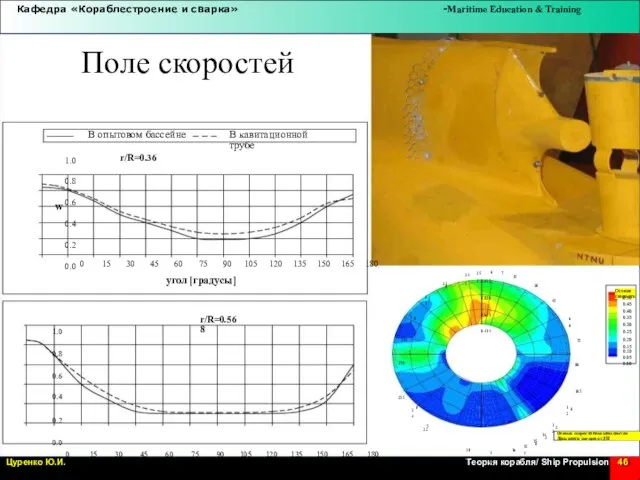
Поле скоростей
1.0
0.8
0.6
0.4
0.2
0.0
0
15
30
45
60
75
90
105
120
135
150
165
180
угол [градусы]
w
В кавитационной трубе
В опытовом бассейне
r/R=0.36
0.0
0.2
0.6
0.4
0.8
1.0
0
15
30
45
60
75
90
105
120
135
150
165
180
r/R=0.568
60
75
90
105
12
0
13
5
24
0
270
255
285
30
0
31
5
0.621
0.414
0.828
1.035
Осевая
скорость
0.50
0.45
0.40
0.35
0.30
0.25
0.20
0.15
0.10
0.05
0.00
Осевык скорости показаны цветом
Диск
352
0
345
7
30
15
45
33
0
22
5
14
3
15
165
0
157
195
180
Поле скоростей
1.0
0.8
0.6
0.4
0.2
0.0
0
15
30
45
60
75
90
105
120
135
150
165
180
угол [градусы]
w
В кавитационной трубе
В опытовом бассейне
r/R=0.36
0.0
0.2
0.6
0.4
0.8
1.0
0
15
30
45
60
75
90
105
120
135
150
165
180
r/R=0.568
60
75
90
105
12
0
13
5
24
0
270
255
285
30
0
31
5
0.621
0.414
0.828
1.035
Осевая
скорость
0.50
0.45
0.40
0.35
0.30
0.25
0.20
0.15
0.10
0.05
0.00
Осевык скорости показаны цветом
Диск
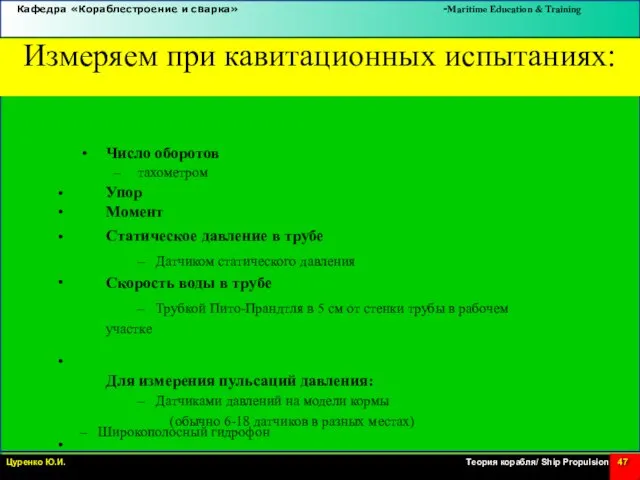
Измеряем при кавитационных испытаниях:
•
Число оборотов
–
тахометром
•
•
•
•
•
•
Упор
Момент
Статическое давление в трубе
– Датчиком статического давления
Скорость
Измеряем при кавитационных испытаниях:
•
Число оборотов
–
тахометром
•
•
•
•
•
•
Упор
Момент
Статическое давление в трубе
– Датчиком статического давления
Скорость

Измерения:
Трубка Пито-Прандтля
Статическое давление
Мембрана
ВАЛ
Индукционный датчик
Для измерения упора
Упор
Момент
Тензометр
Для измерения крутящего момента
Измерения:
Трубка Пито-Прандтля
Статическое давление
Мембрана
ВАЛ
Индукционный датчик
Для измерения упора
Упор
Момент
Тензометр
Для измерения крутящего момента
Подводная ракета «ШКВАЛ»
VIDEO
Подводная ракета «ШКВАЛ»
VIDEO
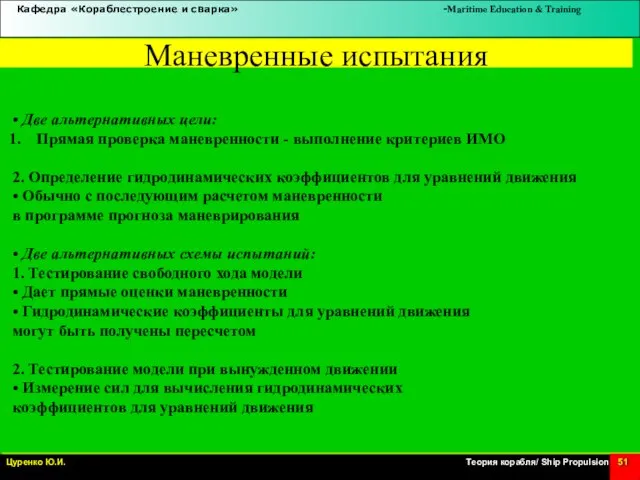
Маневренные испытания
• Две альтернативных цели:
Прямая проверка маневренности - выполнение критериев ИМО
2.
Маневренные испытания
• Две альтернативных цели:
Прямая проверка маневренности - выполнение критериев ИМО
2.
Виды маневренных испытаний
• IMO standard maneuvers (Стандартные тесты ИМО):
– Zig-zag (Зиг-Заг)
•
Виды маневренных испытаний
• IMO standard maneuvers (Стандартные тесты ИМО):
– Zig-zag (Зиг-Заг)
•
Маневр Зиг-Заг
Маневр Зиг-Заг
Маневр Зиг-Заг
Испытание на зигзаг 10°/10° выполняется посредством перекладки руля на 10°
Маневр Зиг-Заг
Испытание на зигзаг 10°/10° выполняется посредством перекладки руля на 10°

Маневр выхода на циркуляцию
Маневр выхода на циркуляцию
Срочная остановка
Срочная остановка

Срочная остановка
Срочная остановка
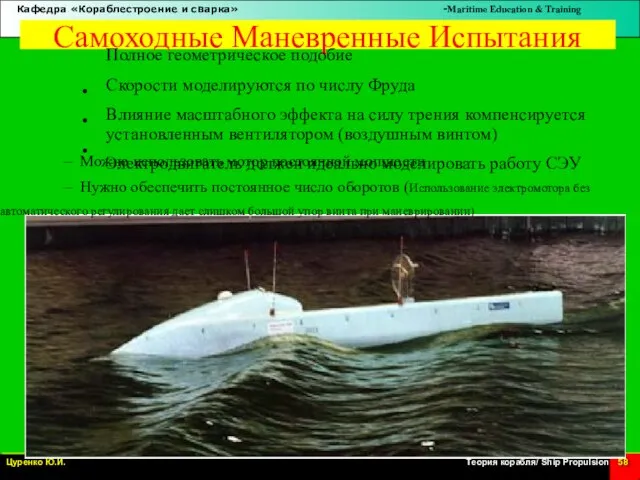
Самоходные Маневренные Испытания
•
•
•
Полное геометрическое подобие
Скорости моделируются по числу Фруда
Влияние масштабного эффекта
Самоходные Маневренные Испытания
•
•
•
Полное геометрическое подобие
Скорости моделируются по числу Фруда
Влияние масштабного эффекта
- ИЗМЕРЯЕМ:
•
•
•
•
•
Число оборотов винта
Углы перекладки рулей
Скорость
Сигналы на органах управления
Положение модели и
•
•
•
•
•
Число оборотов винта
Углы перекладки рулей
Скорость
Сигналы на органах управления
Положение модели и
Самоходные испытания
VIDEO
Самоходные испытания
VIDEO
39
Маневренные испытания с
закрепленными моделями
• Механизм плоских движений (Planar Motion Mechanism
39
Маневренные испытания с
закрепленными моделями
• Механизм плоских движений (Planar Motion Mechanism

Штормовой бассейн
Штормовой бассейн

Штормовой бассейн
Штормовой бассейн

Штормовой бассейн
Штормовой бассейн

Штормовой бассейн
Штормовой бассейн
Испытания на регулярном волнении.
Параметрическая качка
VIDEO
Испытания на регулярном волнении.
Параметрическая качка
VIDEO
Ледовые исытания
VIDEO
Ледовые исытания
VIDEO
Механизм плоских движений
(Planar Motion Mechanism (PMM))
Механизм плоских движений
(Planar Motion Mechanism (PMM))
Механизм плоских движений Planar Motion Mechanism
VIDEO
Механизм плоских движений Planar Motion Mechanism
VIDEO
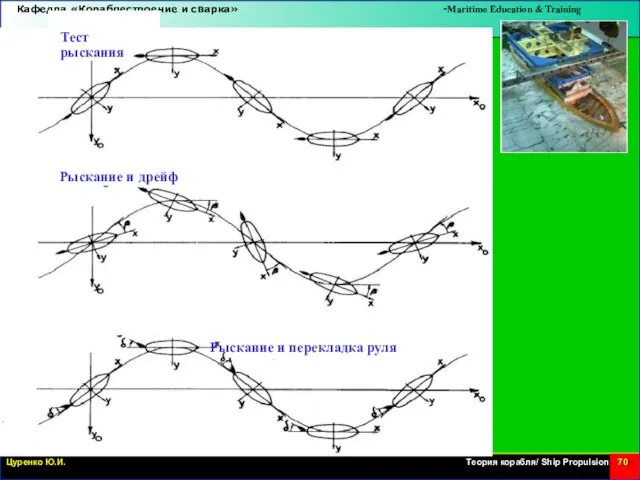
Тест рыскания
Рыскание и дрейф
Рыскание и перекладка руля
Тест рыскания
Рыскание и дрейф
Рыскание и перекладка руля
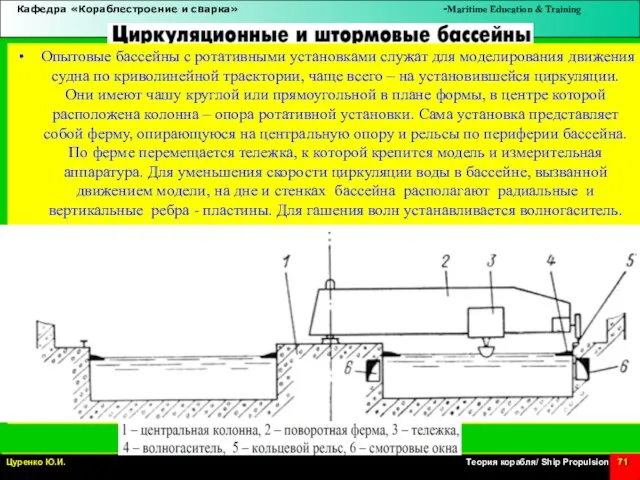
Опытовые бассейны с ротативными установками служат для моделирования движения судна по
Опытовые бассейны с ротативными установками служат для моделирования движения судна по
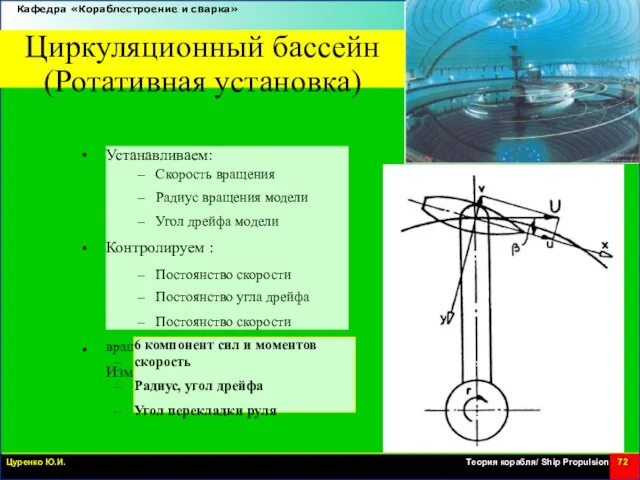
Циркуляционный бассейн
(Ротативная установка)
•
•
•
Устанавливаем:
– Скорость вращения
– Радиус вращения модели
– Угол дрейфа модели
Контролируем
Циркуляционный бассейн
(Ротативная установка)
•
•
•
Устанавливаем:
– Скорость вращения
– Радиус вращения модели
– Угол дрейфа модели
Контролируем
Испытания модели
с фиксированным углом дрейфа
•
•
•
•
Модель буксируется в бассейне с фиксированным
Испытания модели
с фиксированным углом дрейфа
•
•
•
•
Модель буксируется в бассейне с фиксированным
ТРЕБОВАНИЯ К МАНЕВРЕННЫМ ХАРАКТЕРИСТИКАМ
.1 Поворотливость.
При выполнении маневра на циркуляцию выдвиг не
ТРЕБОВАНИЯ К МАНЕВРЕННЫМ ХАРАКТЕРИСТИКАМ
.1 Поворотливость.
При выполнении маневра на циркуляцию выдвиг не
МКОБ: Международная Конференция Опытовых Бассейнов
ITTC: International Towing Tank Conference
•
•
•
•
•
The ultimate source
МКОБ: Международная Конференция Опытовых Бассейнов
ITTC: International Towing Tank Conference
•
•
•
•
•
The ultimate source
 Свойства и применение радиоволн
Свойства и применение радиоволн  Фотоэффект. Теория фотоэффекта
Фотоэффект. Теория фотоэффекта Газовые законы
Газовые законы Вечный двигатель Подготовила: ученица 7 Б класса Погуляева Ирина
Вечный двигатель Подготовила: ученица 7 Б класса Погуляева Ирина Магнитные подшипники
Магнитные подшипники Сила Архимеда. Плавание тел
Сила Архимеда. Плавание тел Базовое эксплуатационное депо, с детальной разработкой электромашинного цеха. Ремонт тягового электродвигателя
Базовое эксплуатационное депо, с детальной разработкой электромашинного цеха. Ремонт тягового электродвигателя Средства измерения температуры
Средства измерения температуры Типы камер сгорания и их сравнительная оценка
Типы камер сгорания и их сравнительная оценка Теплоёмкость
Теплоёмкость Постоянный электрический ток
Постоянный электрический ток Презентация по физике "«Давление в неподвижных жидкостях и газах»" - скачать
Презентация по физике "«Давление в неподвижных жидкостях и газах»" - скачать  Электростатика. Электрический заряд. Закон Кулона
Электростатика. Электрический заряд. Закон Кулона Сила давления атмосферного воздуха, опыт бургомистра Магдебурга Отто фон Герике
Сила давления атмосферного воздуха, опыт бургомистра Магдебурга Отто фон Герике Формирование и первичная обработка видеосигналов
Формирование и первичная обработка видеосигналов Энергия и движение. Источники энергии
Энергия и движение. Источники энергии Масс-спектрометрия. (Лекция 6)
Масс-спектрометрия. (Лекция 6) Искусственные спутники Земли
Искусственные спутники Земли Акустический шум и его воздействие на организм человека
Акустический шум и его воздействие на организм человека  Презентация по физике "Зрительные иллюзии" - скачать бесплатно
Презентация по физике "Зрительные иллюзии" - скачать бесплатно Разделы физики
Разделы физики Понятие радиоволн. Канал связи и его элементы. Задачи, решаемые электродинамикой. Основные свойства радиоволн
Понятие радиоволн. Канал связи и его элементы. Задачи, решаемые электродинамикой. Основные свойства радиоволн Шкала электромагнитных волн
Шкала электромагнитных волн Люминесценция и светящиеся обои
Люминесценция и светящиеся обои Механические колебания и волны. Акустика
Механические колебания и волны. Акустика Как осмыслить то, чего нельзя увидеть. От сил к фундаментальным взаимодействиям
Как осмыслить то, чего нельзя увидеть. От сил к фундаментальным взаимодействиям Идеальная жидкость. Вязкость жидкости. Ламинарный и турбулентный поток
Идеальная жидкость. Вязкость жидкости. Ламинарный и турбулентный поток Механические колебания
Механические колебания