- Элементы и функциональные устройства судовой автоматики

Содержание
- 2. Часть 1 Введение. Основные понятия. Элементы, их классификация и описание Типовые динамические звенья
- 3. Автоматическое управление ― автоматическое осуществление совокупности воздействий, выбранных из множества возможных на основании определенной информации и
- 4. Величины, характеризующие воздействия на управляемый объект
- 5. Структурная схема автоматической системы с одной управляемой величиной
- 6. Типовая функциональная схема системы автоматического регулирования
- 7. Элементы автоматики Элемент автоматики ― функционально и конструктивно законченное устройство, предназначенное для выполнения некоторой элементарной операции
- 8. Общее нелинейное уравнение системы: (1.1) (обычно n > m) Уравнение статики: F(y, x) = 0. (1.2)
- 9. Непрерывная (а) и релейная (б) статические характеристики
- 10. Типовые воздействия 1. Единичное ступенчатое воздействие: 2. Единичная импульсная функция δ(t): Единичная ступенчатая функция и единичная
- 11. Математическое описание линейных элементов Дифференциальное уравнение (1.8) ____ Применяя к (1.8) преобразование Лапласа (1.9) получаем: (anpn
- 12. Динамические характеристики элементов Переходная функция h(t) – реакция элемента на входное воздействие в виде единичной ступенчатой
- 13. Типовые динамические звенья позиционные интегрирующие дифференцирующие с постоянным запаздыванием
- 14. Позиционные звенья Безынерционное звено Уравнение: y = kx Передаточная функция: W(p) = k Переходная функция: h(t)
- 15. Апериодическое звено 1 порядка Уравнение: Передаточная функция: Переходная и импульсная функции: Примеры: RC- и RL-цепь ,
- 16. Звено 2 порядка Уравнение: Передаточная функция: Переходная и импульсная функции при апериодическом процессе (ξ > 1):
- 17. Графики переходной (а) и импульсной (б) функций позиционного звена второго порядка
- 18. Интегрирующие звенья Идеальное интегрирующее звено: Передаточная функция: Переходная функция: h(t) = kt·1(t) Импульсная функция: w(t) =
- 19. Графики переходной функции h(t) и импульсной функции w(t) интегрирующих звеньев
- 20. Дифференцирующие звенья Идеальное дифференцирующее звено: Передаточная функция: Переходная функция: h(t) = k·δ(t) Импульсная функция: не имеет
- 21. Графики переходной и импульсной функций реального дифференцирующего звена
- 22. Примеры реальных дифференцирующих звеньев Дифференцирующая RC-цепь Дифференцирующий трансформатор
- 23. Звено с постоянным запаздыванием Уравнение: y = kx(t – τ) Разложение в ряд Тейлора: Изображение по
- 24. Типовые нелинейности Ограничение (насыщение) Зона нечувствительности
- 25. Зона нечувствительности с насыщением Релейный элемент (сухое трение)
- 26. Релейная характеристика с зоной нечувствительности Релейная характеристика с гистерезисом
- 27. Релейная характеристика с зоной нечувствительности и гистерезисом Пропорциональное звено с коэффициентом передачи, зависящим от знака
- 29. Скачать презентацию
Часть 1
Введение.
Основные понятия.
Элементы, их классификация и описание
Типовые динамические звенья
Часть 1
Введение.
Основные понятия.
Элементы, их классификация и описание
Типовые динамические звенья
Автоматическое управление ― автоматическое осуществление совокупности воздействий, выбранных из множества возможных
Автоматическое управление ― автоматическое осуществление совокупности воздействий, выбранных из множества возможных

Величины, характеризующие воздействия
на управляемый объект
Величины, характеризующие воздействия
на управляемый объект
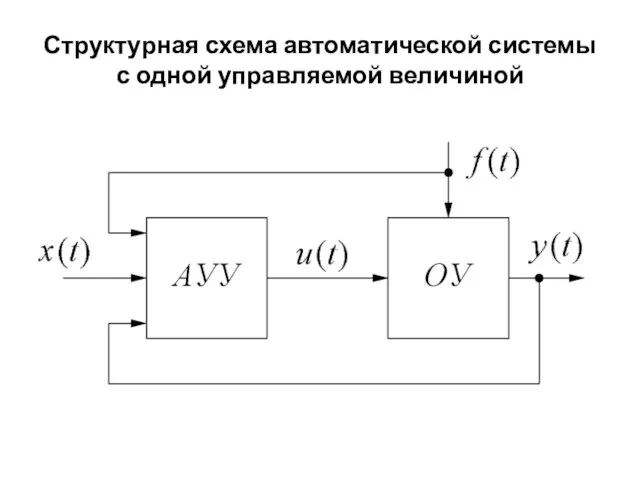
Структурная схема автоматической системы
с одной управляемой величиной
Структурная схема автоматической системы
с одной управляемой величиной
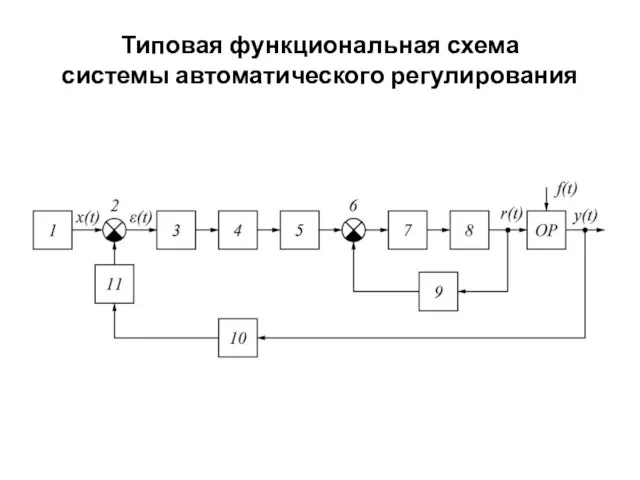
Типовая функциональная схема
системы автоматического регулирования
Типовая функциональная схема
системы автоматического регулирования
Элементы автоматики
Элемент автоматики ― функционально и конструктивно законченное устройство, предназначенное для
Элементы автоматики
Элемент автоматики ― функционально и конструктивно законченное устройство, предназначенное для

Общее нелинейное уравнение системы: (1.1)
(обычно n > m)
Уравнение статики:
F(y, x)
Общее нелинейное уравнение системы: (1.1)
(обычно n > m)
Уравнение статики:
F(y, x)
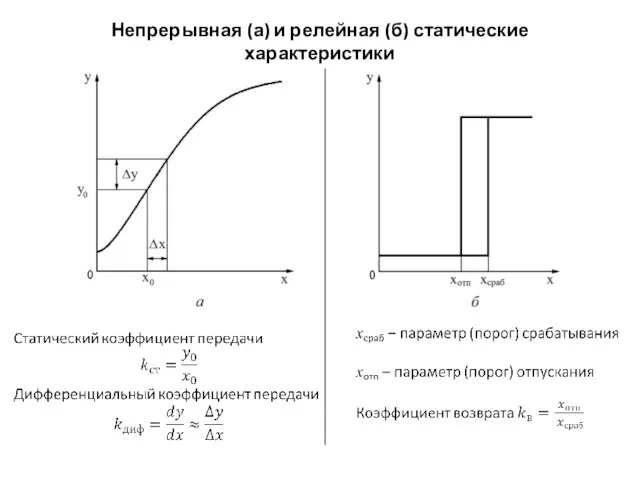
Непрерывная (а) и релейная (б) статические характеристики
Непрерывная (а) и релейная (б) статические характеристики

Типовые воздействия
1. Единичное ступенчатое воздействие:
2. Единичная импульсная функция δ(t):
Единичная ступенчатая функция
Типовые воздействия
1. Единичное ступенчатое воздействие:
2. Единичная импульсная функция δ(t):
Единичная ступенчатая функция
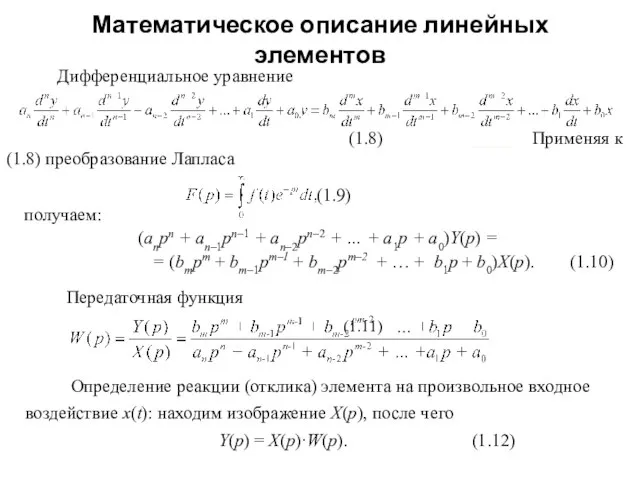
Математическое описание линейных элементов
Дифференциальное уравнение
(1.8) ____ Применяя к (1.8)
Математическое описание линейных элементов
Дифференциальное уравнение
(1.8) ____ Применяя к (1.8)

Динамические характеристики элементов
Переходная функция h(t) – реакция элемента на входное воздействие
Динамические характеристики элементов
Переходная функция h(t) – реакция элемента на входное воздействие
Типовые динамические звенья
позиционные
интегрирующие
дифференцирующие
с постоянным запаздыванием
Типовые динамические звенья
позиционные
интегрирующие
дифференцирующие
с постоянным запаздыванием
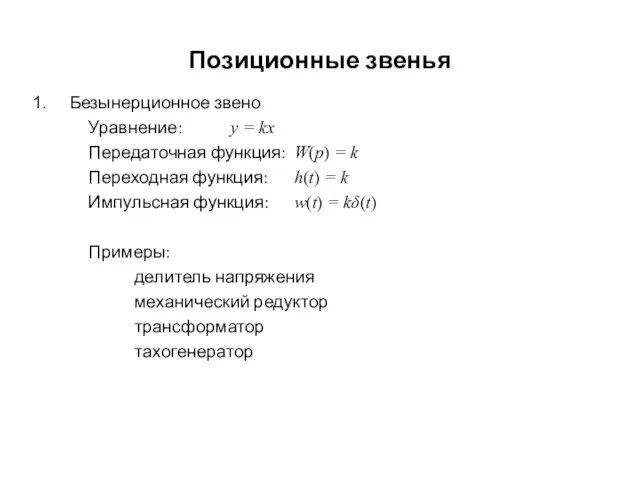
Позиционные звенья
Безынерционное звено
Уравнение: y = kx
Передаточная функция: W(p) = k
Переходная
Позиционные звенья
Безынерционное звено
Уравнение: y = kx
Передаточная функция: W(p) = k
Переходная
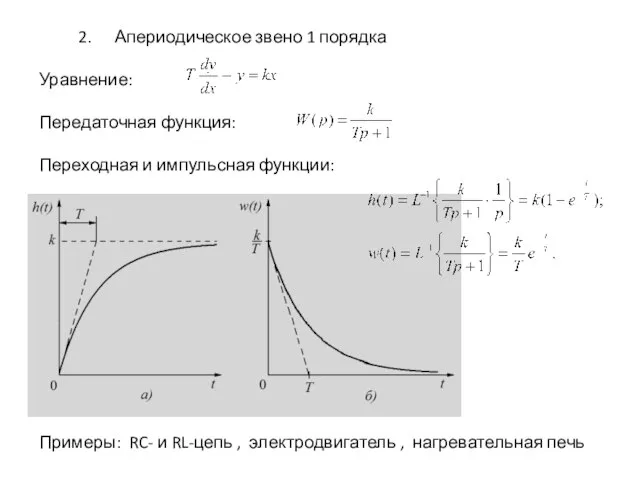
Апериодическое звено 1 порядка
Уравнение:
Передаточная функция:
Переходная и импульсная функции:
Примеры: RC-
Апериодическое звено 1 порядка
Уравнение:
Передаточная функция:
Переходная и импульсная функции:
Примеры: RC-

Звено 2 порядка
Уравнение:
Передаточная функция:
Переходная и импульсная функции при апериодическом
Звено 2 порядка
Уравнение:
Передаточная функция:
Переходная и импульсная функции при апериодическом
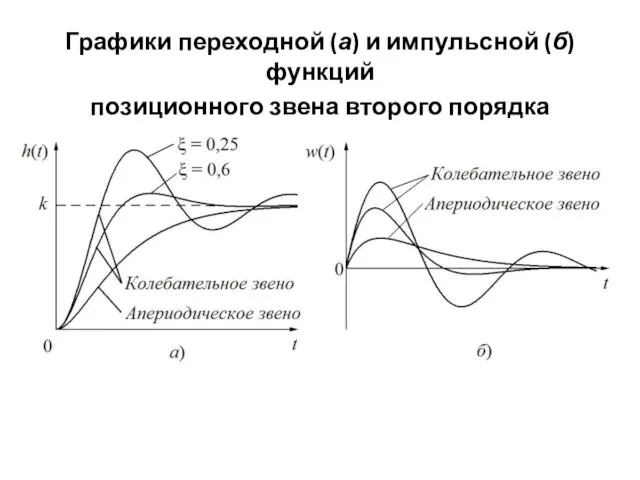
Графики переходной (а) и импульсной (б) функций
позиционного звена второго порядка
Графики переходной (а) и импульсной (б) функций
позиционного звена второго порядка

Интегрирующие звенья
Идеальное интегрирующее звено:
Передаточная функция:
Переходная функция: h(t) = kt·1(t)
Импульсная функция: w(t) =
Интегрирующие звенья
Идеальное интегрирующее звено:
Передаточная функция:
Переходная функция: h(t) = kt·1(t)
Импульсная функция: w(t) =
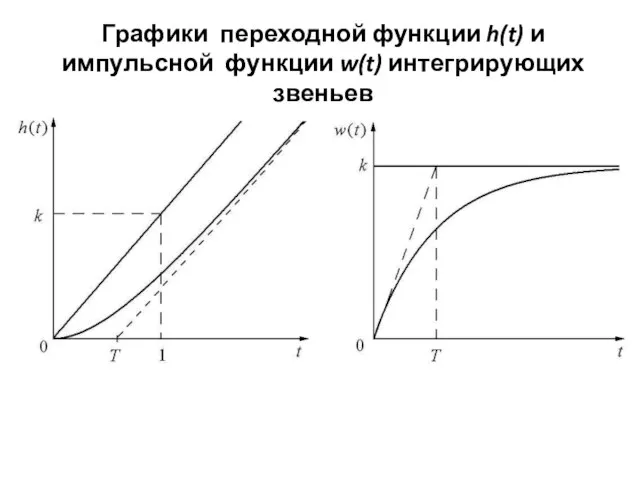
Графики переходной функции h(t) и импульсной функции w(t) интегрирующих звеньев
Графики переходной функции h(t) и импульсной функции w(t) интегрирующих звеньев
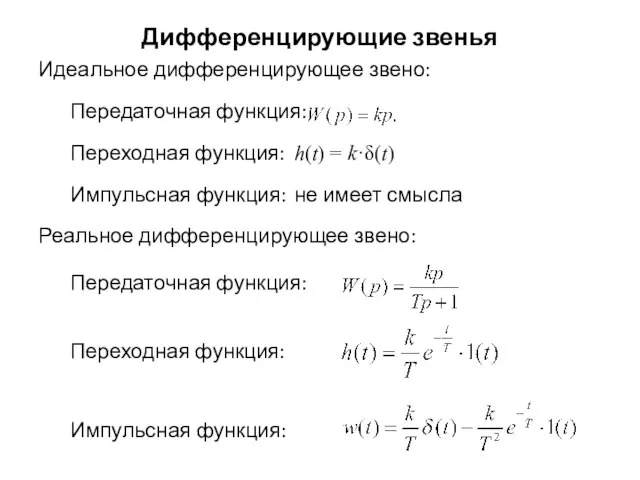
Дифференцирующие звенья
Идеальное дифференцирующее звено:
Передаточная функция:
Переходная функция: h(t) = k·δ(t)
Импульсная функция: не имеет
Дифференцирующие звенья
Идеальное дифференцирующее звено:
Передаточная функция:
Переходная функция: h(t) = k·δ(t)
Импульсная функция: не имеет
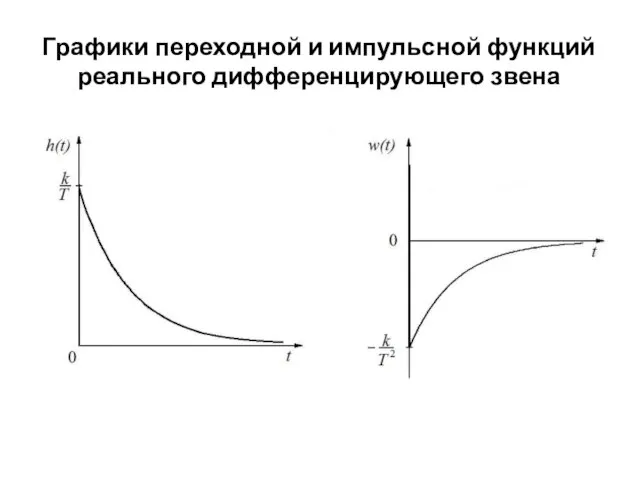
Графики переходной и импульсной функций
реального дифференцирующего звена
Графики переходной и импульсной функций
реального дифференцирующего звена
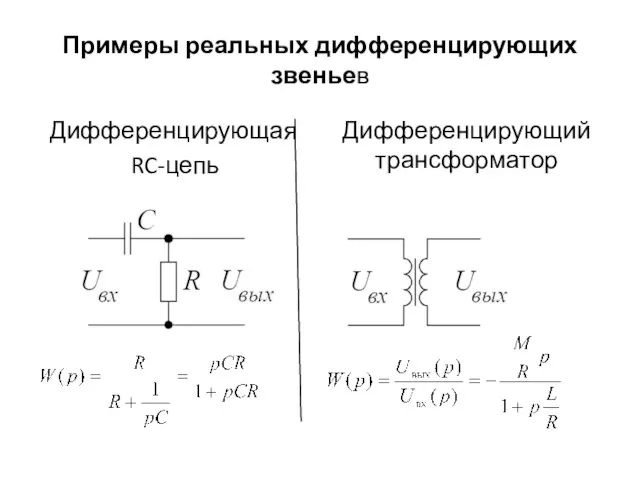
Примеры реальных дифференцирующих звеньев
Дифференцирующая
RC-цепь
Дифференцирующий трансформатор
Примеры реальных дифференцирующих звеньев
Дифференцирующая
RC-цепь
Дифференцирующий трансформатор

Звено с постоянным запаздыванием
Уравнение: y = kx(t – τ)
Разложение в ряд Тейлора:
Звено с постоянным запаздыванием
Уравнение: y = kx(t – τ)
Разложение в ряд Тейлора:
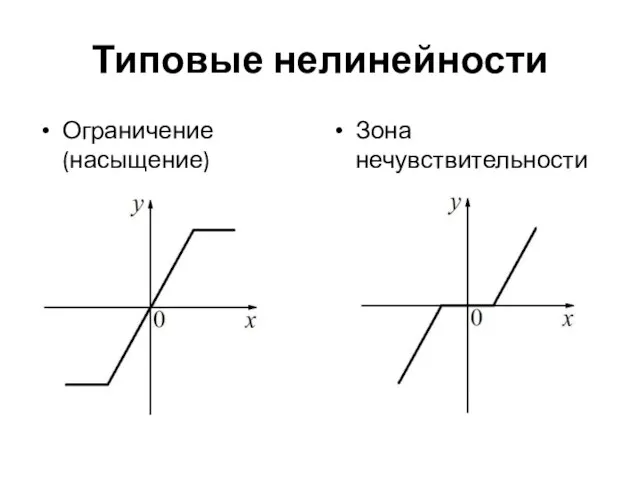
Типовые нелинейности
Ограничение (насыщение)
Зона нечувствительности
Типовые нелинейности
Ограничение (насыщение)
Зона нечувствительности

Зона нечувствительности с насыщением
Релейный элемент (сухое трение)
Зона нечувствительности с насыщением
Релейный элемент (сухое трение)

Релейная характеристика с зоной нечувствительности
Релейная характеристика с гистерезисом
Релейная характеристика с зоной нечувствительности
Релейная характеристика с гистерезисом
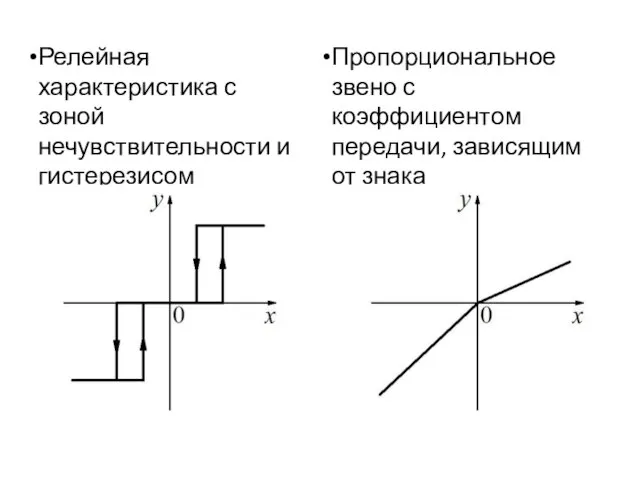
Релейная характеристика с зоной нечувствительности и гистерезисом
Пропорциональное звено с коэффициентом передачи,
Релейная характеристика с зоной нечувствительности и гистерезисом
Пропорциональное звено с коэффициентом передачи,
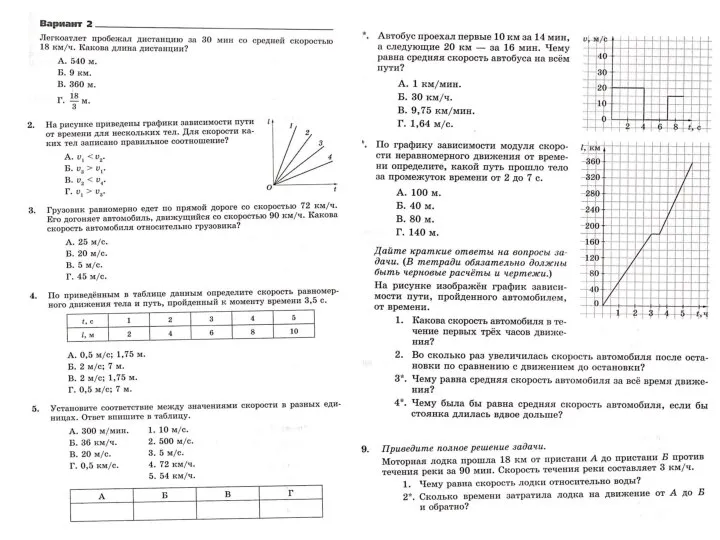 Задачи на движение
Задачи на движение Кипение. Удельная теплота парообразования
Кипение. Удельная теплота парообразования Аттестационная работа. План проведения дистанционной недели физики в Ленинском муниципальном районе Московской области
Аттестационная работа. План проведения дистанционной недели физики в Ленинском муниципальном районе Московской области 15 минут про структуру атома
15 минут про структуру атома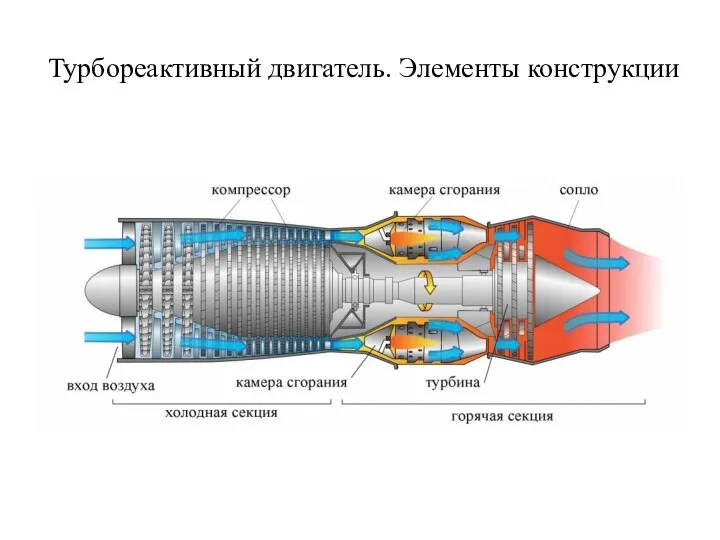 Турбореактивный двигатель. Элементы конструкции
Турбореактивный двигатель. Элементы конструкции Становление и развитие паротурбинных установок. (Тема 4)
Становление и развитие паротурбинных установок. (Тема 4) 1. ОСНОВНЫЕ СВЕТОТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ 2. ВИДЫ ОСВЕЩЕНИЯ 3. НОРМИРОВАНИЕ 4. ИСТОЧНИКИ СВЕТА И СВЕТИЛЬНИКИ
1. ОСНОВНЫЕ СВЕТОТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ 2. ВИДЫ ОСВЕЩЕНИЯ 3. НОРМИРОВАНИЕ 4. ИСТОЧНИКИ СВЕТА И СВЕТИЛЬНИКИ Познавательная сейсмология. Научно-популярные материалы
Познавательная сейсмология. Научно-популярные материалы Технологический колледж сервиса Государственное образовательное учреждение высшего профессионального образования Южно-Уральс
Технологический колледж сервиса Государственное образовательное учреждение высшего профессионального образования Южно-Уральс Улугбек, Галилей и Гук Мирза Мухаммед ибн Шахрух ибн Тимур Улугбек Гураган (1394-1449) -внук Тамерлана. Известен как выдающийся астр
Улугбек, Галилей и Гук Мирза Мухаммед ибн Шахрух ибн Тимур Улугбек Гураган (1394-1449) -внук Тамерлана. Известен как выдающийся астр Презентация по физике "Интерференция" - скачать
Презентация по физике "Интерференция" - скачать  Трансформаторы. Устройство однофазного трансформатора
Трансформаторы. Устройство однофазного трансформатора Путешествие по стране физика
Путешествие по стране физика Молекулярная физика
Молекулярная физика  Объяснение электрических явлений
Объяснение электрических явлений Презентация по физике "Закон ома для цепи" - скачать
Презентация по физике "Закон ома для цепи" - скачать  Корпускулярно-волновой дуализм
Корпускулярно-волновой дуализм Аттестационная работа. На тему: Методическая разработка занятия Что такое магнит?
Аттестационная работа. На тему: Методическая разработка занятия Что такое магнит? Спектроскопические методы анализа
Спектроскопические методы анализа Швартовное устройство
Швартовное устройство Mechacnics. Molecular physics and Thermodynamics. Electricity. Magnetism
Mechacnics. Molecular physics and Thermodynamics. Electricity. Magnetism Экстраполяция. Динамика полёта и пилотирование самолётов
Экстраполяция. Динамика полёта и пилотирование самолётов ПОЛУЧЕНИЕ РАДИОАКТИВНЫХ ИЗОТОПОВ И ИХ ПРИМЕНЕНИЕ
ПОЛУЧЕНИЕ РАДИОАКТИВНЫХ ИЗОТОПОВ И ИХ ПРИМЕНЕНИЕ Лазеры. Лазерное излучение
Лазеры. Лазерное излучение Дисперсия света. Использование в технике
Дисперсия света. Использование в технике Голография и ее применение
Голография и ее применение Нагревание проводников электрическим током. Закон Джоуля-Ленца
Нагревание проводников электрическим током. Закон Джоуля-Ленца Презентация на тему "Спектры"
Презентация на тему "Спектры"