- ЭМП. Электродвигатели

Содержание
- 2. Состоят из: источника энергии (двигателя) редуктора аппарата управления (нагрузка) Предназначены для передачи энергии источника через редуктор
- 3. Источник энергии – двигатель: тепловой электрический пневматический гидравлический пружинный инерционный Наибольшее распространение в приборостроении получил электромеханический
- 4. ЭМП Нагрузка – исполнительное устройство (ИУ) Отсчетные устройства – шкальные и цифровые Назначение: Отсчетные – высокая
- 5. ЭМП Порядок расчета: выбор электродвигателя (ЭД) 1.1) Возможные для применения типы двигателей 1.2) Выбор конкретного двигателя
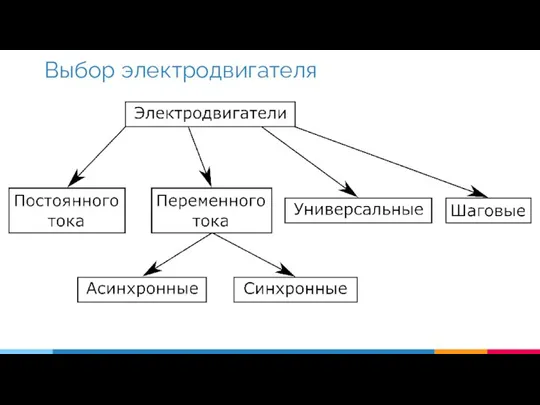
- 6. Выбор электродвигателя
- 7. По назначению: общего назначения управляемые (следящие) По роду тока: постоянного тока переменного тока универсальные По изменению
- 8. ЭД постоянного тока: приводы механических (растровых) модуляторов, сканирующих оптических систем, блоков позиционирования, переключения элементов, в системах
- 9. Основные характеристики ЭД
- 10. Основные характеристики ЭД
- 11. Основные характеристики ЭД
- 12. Управляемость ЭД: регулируемые или нерегулируемый Режим работы двигателя (нерегулируемый, длительного действия, кратковременный, следящий) Механическая характеристика ЭД
- 13. для нерегулируемого привода применяют двигатели общего назначения – работают в номинальном режиме и их скоростью не
- 14. если привод следящий (управляемый), то применяют исполнительные (управляемые) двигатели; для следящих ЭМП целесообразно использовать двигатели с
- 15. Выбор типоразмера ЭД
- 16. Проверка правильности выбора двигателя
- 17. Время разгона и время выбега
- 18. закон, вид и характер движения выходного звена общие передаточные отношения цепей ЭМП параметры нагрузки требуемая точность
- 20. Скачать презентацию
Состоят из:
источника энергии (двигателя)
редуктора
аппарата управления (нагрузка)
Предназначены для передачи энергии источника через
Состоят из:
источника энергии (двигателя)
редуктора
аппарата управления (нагрузка)
Предназначены для передачи энергии источника через
Источник энергии – двигатель:
тепловой
электрический
пневматический
гидравлический
пружинный
инерционный
Наибольшее распространение в приборостроении получил электромеханический привод –
Источник энергии – двигатель:
тепловой
электрический
пневматический
гидравлический
пружинный
инерционный
Наибольшее распространение в приборостроении получил электромеханический привод –
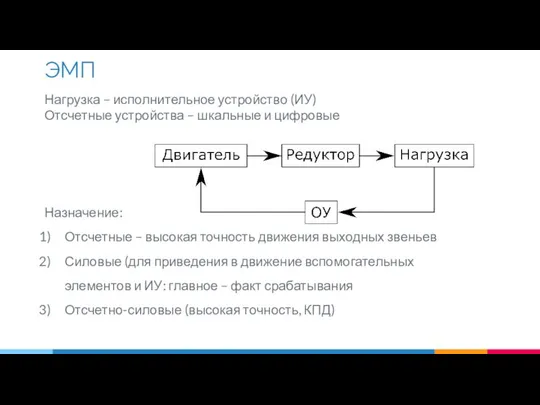
ЭМП
Нагрузка – исполнительное устройство (ИУ)
Отсчетные устройства – шкальные и цифровые
Назначение:
Отсчетные –
ЭМП
Нагрузка – исполнительное устройство (ИУ)
Отсчетные устройства – шкальные и цифровые
Назначение:
Отсчетные –
ЭМП
Порядок расчета:
выбор электродвигателя (ЭД)
1.1) Возможные для применения типы двигателей
1.2) Выбор конкретного
ЭМП
Порядок расчета:
выбор электродвигателя (ЭД)
1.1) Возможные для применения типы двигателей
1.2) Выбор конкретного
Выбор электродвигателя
Выбор электродвигателя
По назначению:
общего назначения
управляемые (следящие)
По роду тока:
постоянного тока
переменного тока
универсальные
По изменению скорости:
постоянная (синхронные
По назначению:
общего назначения
управляемые (следящие)
По роду тока:
постоянного тока
переменного тока
универсальные
По изменению скорости:
постоянная (синхронные
ЭД постоянного тока: приводы механических (растровых) модуляторов, сканирующих оптических систем, блоков
ЭД постоянного тока: приводы механических (растровых) модуляторов, сканирующих оптических систем, блоков
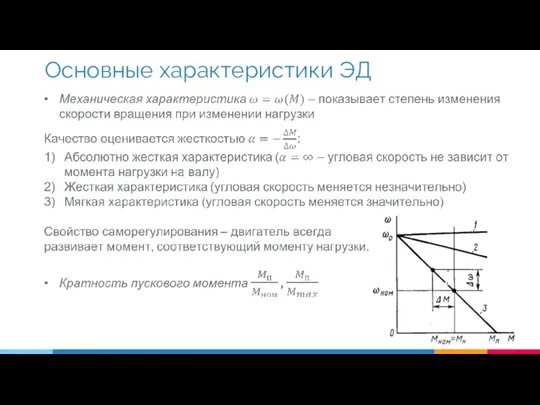
Основные характеристики ЭД
Основные характеристики ЭД
Основные характеристики ЭД
Основные характеристики ЭД
Основные характеристики ЭД
Основные характеристики ЭД
Управляемость ЭД: регулируемые или нерегулируемый
Режим работы двигателя (нерегулируемый, длительного действия, кратковременный,
Управляемость ЭД: регулируемые или нерегулируемый
Режим работы двигателя (нерегулируемый, длительного действия, кратковременный,
для нерегулируемого привода применяют двигатели общего назначения – работают в номинальном
для нерегулируемого привода применяют двигатели общего назначения – работают в номинальном
если привод следящий (управляемый), то применяют исполнительные (управляемые) двигатели; для следящих
если привод следящий (управляемый), то применяют исполнительные (управляемые) двигатели; для следящих
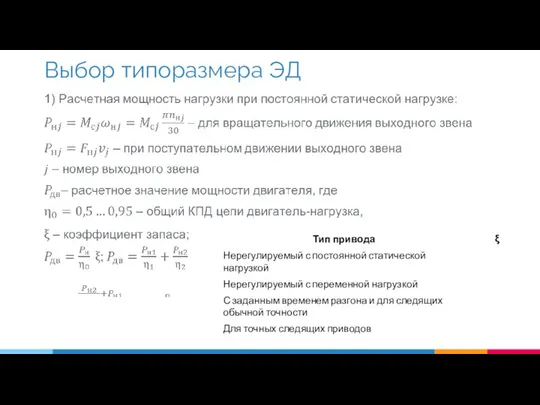
Выбор типоразмера ЭД
Выбор типоразмера ЭД
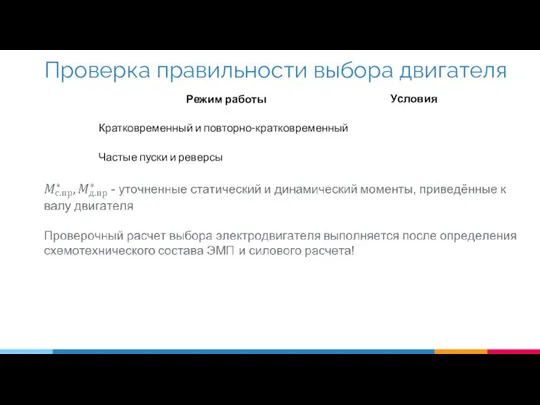
Проверка правильности выбора двигателя
Проверка правильности выбора двигателя
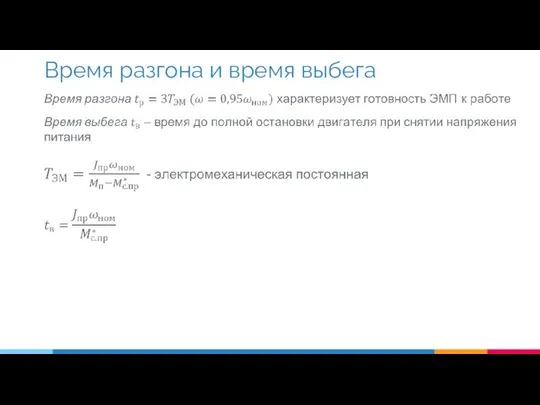
Время разгона и время выбега
Время разгона и время выбега
закон, вид и характер движения выходного звена
общие передаточные отношения цепей ЭМП
параметры
закон, вид и характер движения выходного звена
общие передаточные отношения цепей ЭМП
параметры
 Выдувание пузырей
Выдувание пузырей Физика конденсированного состояния. Движение электронов в атоме
Физика конденсированного состояния. Движение электронов в атоме Лекция 12 Тема:Уравнение состояния идеального газа .
Лекция 12 Тема:Уравнение состояния идеального газа .  Основные © В.Е. Фрадкин, 2004
Основные © В.Е. Фрадкин, 2004 Расчет установившихся режимов простейших электрических сетей. (Глава 6)
Расчет установившихся режимов простейших электрических сетей. (Глава 6) Выполнила: Ученица 4 «э» класса Худобина Елизавета Руководитель: О. И. Баранцева (программа XXI 4 классов) г. Санкт-Петербург 2011 год.
Выполнила: Ученица 4 «э» класса Худобина Елизавета Руководитель: О. И. Баранцева (программа XXI 4 классов) г. Санкт-Петербург 2011 год. Интерференция света 11 класс
Интерференция света 11 класс  Проект «В царстве Архимеда»
Проект «В царстве Архимеда» Механическое движение
Механическое движение Исследовательский проект «Машина Голдберга и бизиборд «Кваторианский домик»
Исследовательский проект «Машина Голдберга и бизиборд «Кваторианский домик» Дифракция света. Принцип Гюйгенса-Френеля
Дифракция света. Принцип Гюйгенса-Френеля Презентация к уроку в 7 классе по теме: «Сила» Учитель физики первой квалификационной категории МБОУ «Россошинская сош»
Презентация к уроку в 7 классе по теме: «Сила» Учитель физики первой квалификационной категории МБОУ «Россошинская сош»  Основы кинематики
Основы кинематики Презентация по физике "Производство, передача и потребление электроэнергии" - скачать
Презентация по физике "Производство, передача и потребление электроэнергии" - скачать  Открытие В.К. Рентгеном Х-лучей. Открытие А. Беккерелем явления радиоактивности
Открытие В.К. Рентгеном Х-лучей. Открытие А. Беккерелем явления радиоактивности Математическое моделирование как основной метод изучения процессов и решения задач оптимизации и управления в биосфере
Математическое моделирование как основной метод изучения процессов и решения задач оптимизации и управления в биосфере Плавление и отвердевание кристаллических тел
Плавление и отвердевание кристаллических тел Диэлектрофорез вирионов осповакцины
Диэлектрофорез вирионов осповакцины ВІльям Томсон
ВІльям Томсон Аттестационная работа. Равновесие рычага и золотое сечение
Аттестационная работа. Равновесие рычага и золотое сечение Поток энергии и цепи питания Автор презентации = учитель биологии ГБОУ СОШ№113 Архипова Татьяна Сергеевна
Поток энергии и цепи питания Автор презентации = учитель биологии ГБОУ СОШ№113 Архипова Татьяна Сергеевна Тяговые расчеты при проектировании железной дороги
Тяговые расчеты при проектировании железной дороги Форма и ширина спектральной линии
Форма и ширина спектральной линии Процессы обработки влажного воздуха
Процессы обработки влажного воздуха Деление тяжелых ядер. Цепная ядерная реакция. Ядерный реактор. Ядерная энергетика
Деление тяжелых ядер. Цепная ядерная реакция. Ядерный реактор. Ядерная энергетика Презентация на тему: Выполнила работу: Хамедова Хасиба 10 класса «А»
Презентация на тему: Выполнила работу: Хамедова Хасиба 10 класса «А»  Явление молнии
Явление молнии  Модели на основе ДУ в частных производных и метод конечных разностей
Модели на основе ДУ в частных производных и метод конечных разностей