- Кинематический анализ плоского рычажного механизма V- образного ДВС. (Семинар 2)

Содержание
- 2. Назад… Далее… © В.Б. Тарабарин «Семинары по курсу ТММ»-2010 МГИУ ИДО Исходные данные к первому ДЗ
- 3. Постановка задачи: Дано: Схема механизма, размеры – HC= HF, β, λ2= λ4, λS2 = λS4, K·ϕ1
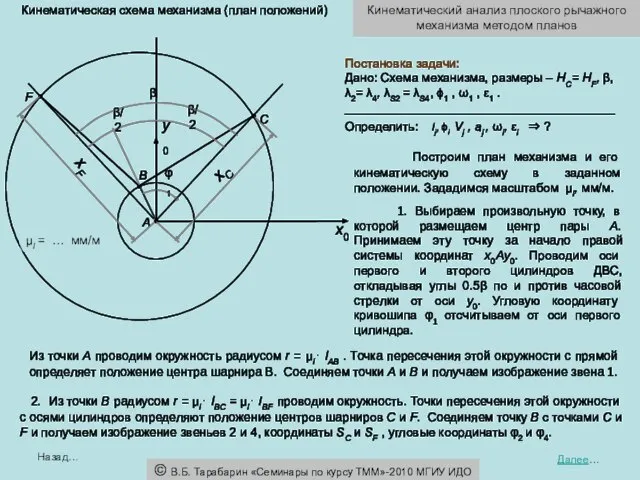
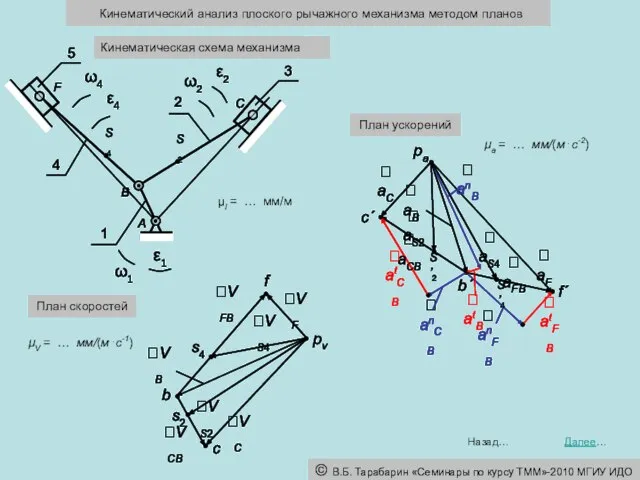
- 4. Кинематический анализ плоского рычажного механизма методом планов Назад… Далее… μl = … мм/м Кинематическая схема механизма
- 5. Кинематический анализ плоского рычажного механизма методом планов Назад… Далее… μl = … мм/м Кинематическая схема механизма
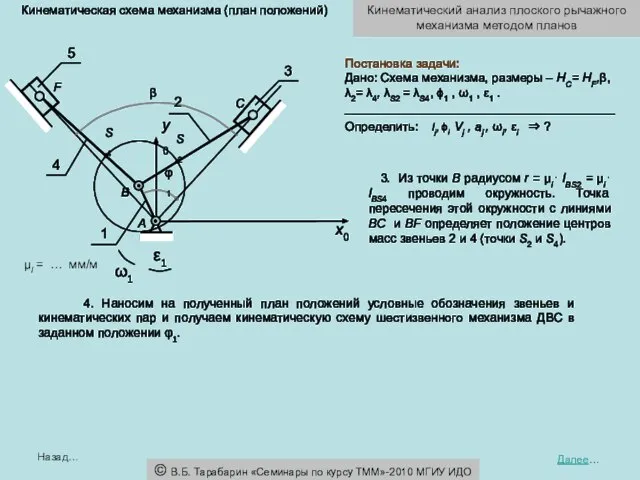
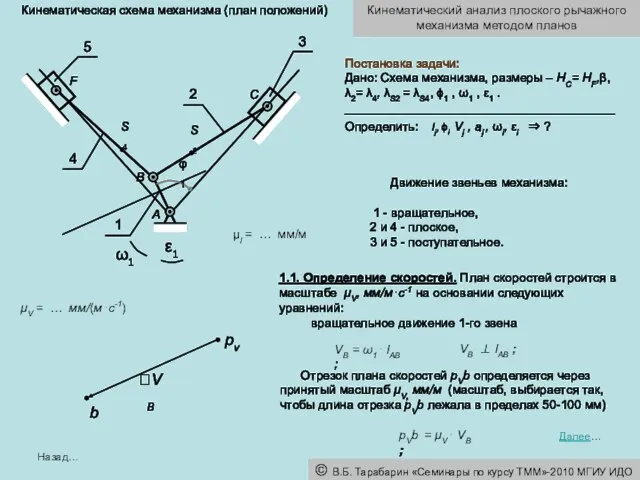
- 6. Кинематический анализ плоского рычажного механизма методом планов Назад… Далее… Кинематическая схема механизма (план положений) Движение звеньев
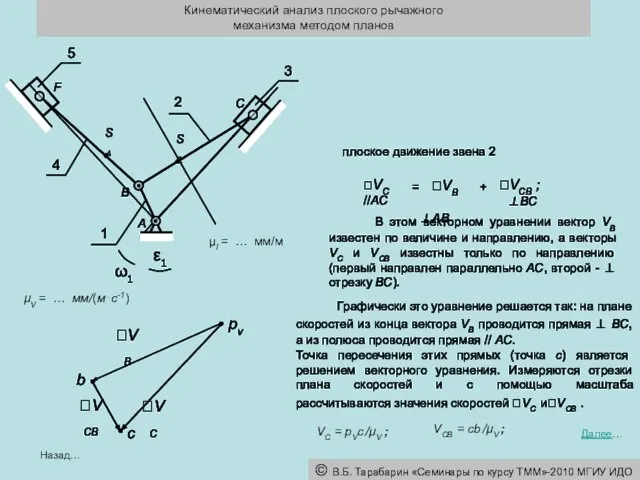
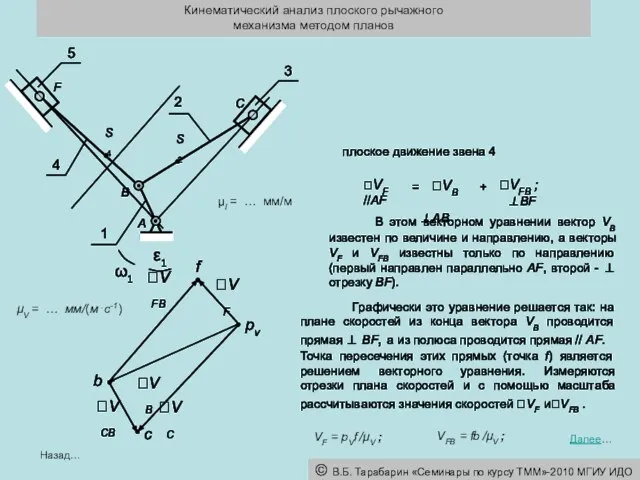
- 7. Кинематический анализ плоского рычажного механизма методом планов Назад… Далее… b VB μV = … мм/(м⋅с-1) плоское
- 8. Кинематический анализ плоского рычажного механизма методом планов Назад… Далее… μV = … мм/(м⋅с-1) плоское движение звена
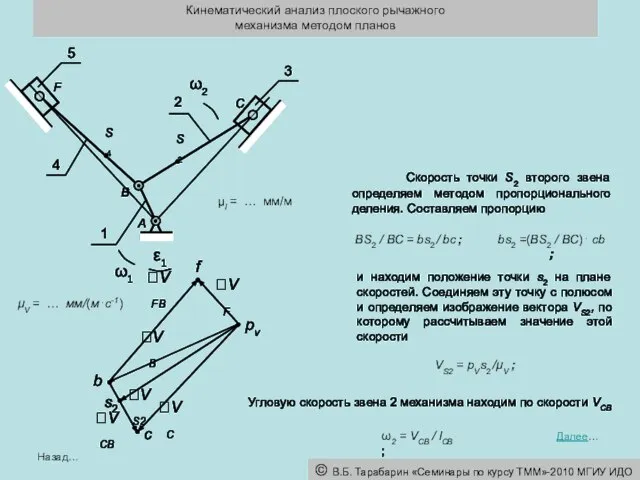
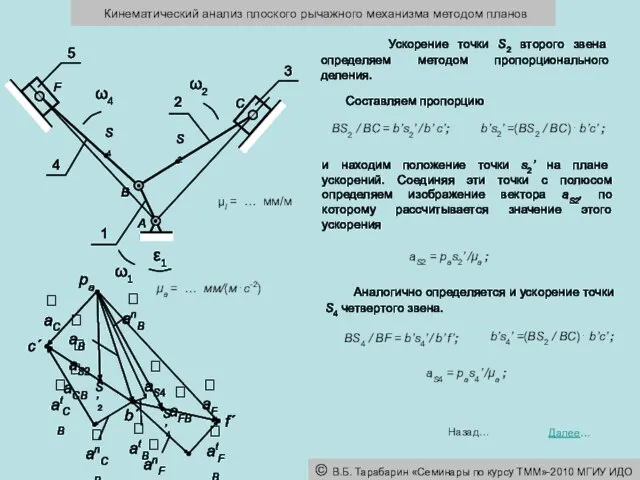
- 9. Кинематический анализ плоского рычажного механизма методом планов Назад… Далее… VS2 Скорость точки S2 второго звена определяем
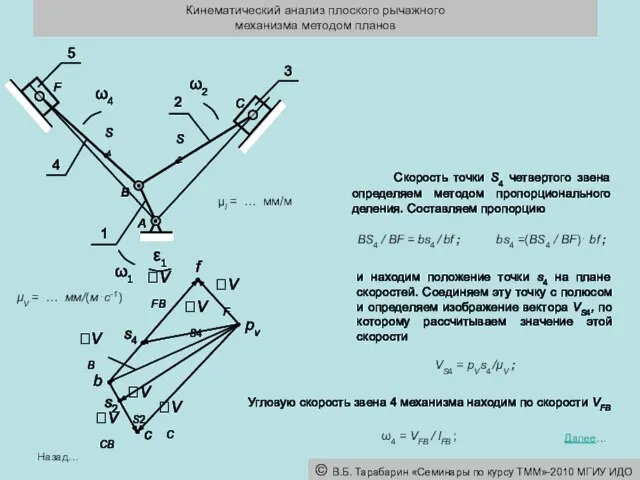
- 10. Кинематический анализ плоского рычажного механизма методом планов Назад… Далее… VS2 Скорость точки S4 четвертого звена определяем
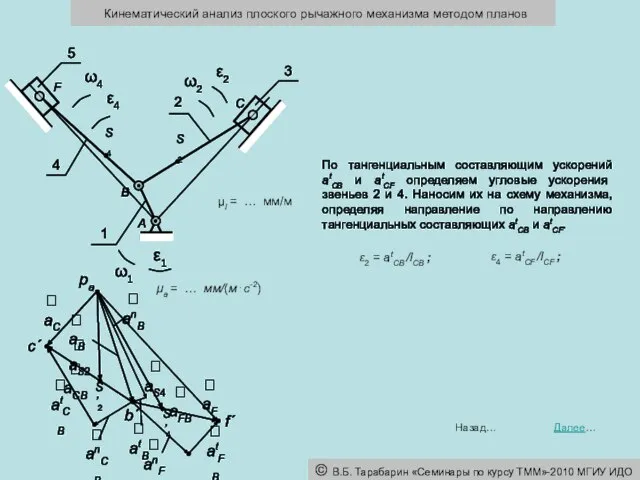
- 11. 1.2. Определение ускорений. Ускорение точки В звена 1 определяем по уравнению вращательного движения В этом векторном
- 12. b´ μa = … мм/(м⋅с-2) Кинематический анализ плоского рычажного механизма методом планов anB atB
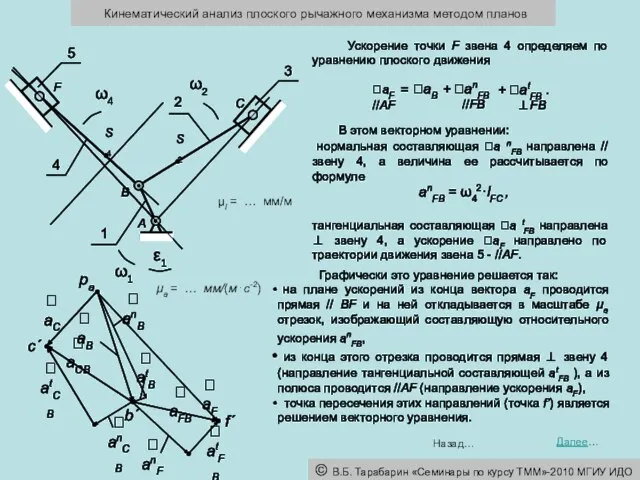
- 13. μa = … мм/(м⋅с-2) Кинематический анализ плоского рычажного механизма методом планов aF Назад… Далее… Ускорение
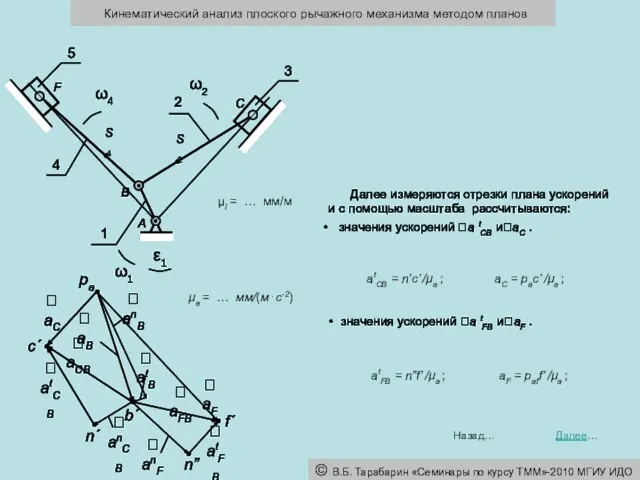
- 14. μa = … мм/(м⋅с-2) Кинематический анализ плоского рычажного механизма методом планов Назад… Далее… Далее измеряются отрезки
- 15. μa = … мм/(м⋅с-2) Кинематический анализ плоского рычажного механизма методом планов aF Назад… Далее…
- 16. μa = … мм/(м⋅с-2) Кинематический анализ плоского рычажного механизма методом планов aF Назад… Далее…
- 17. Кинематический анализ плоского рычажного механизма методом планов Назад… Далее… © В.Б. Тарабарин «Семинары по курсу ТММ»-2010
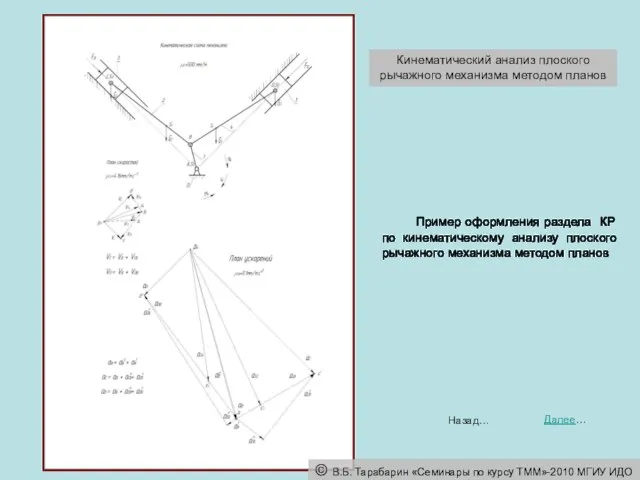
- 18. Кинематический анализ плоского рычажного механизма методом планов Назад… Далее… Пример оформления раздела КР по кинематическому анализу
- 20. Скачать презентацию

Назад…
Далее…
© В.Б. Тарабарин «Семинары по курсу ТММ»-2010 МГИУ ИДО
Исходные данные к
Назад…
Далее…
© В.Б. Тарабарин «Семинары по курсу ТММ»-2010 МГИУ ИДО
Исходные данные к
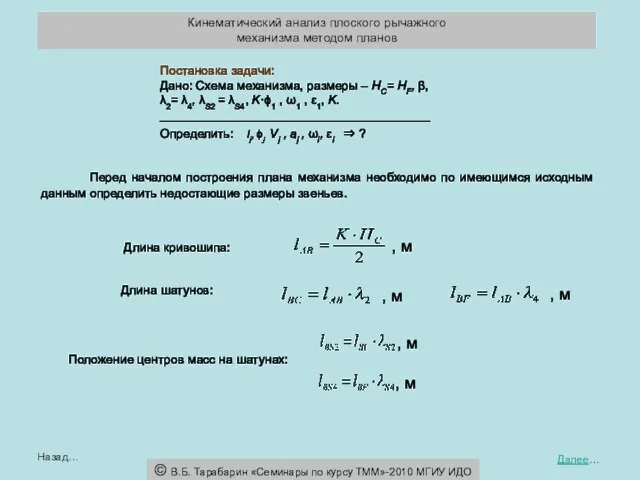
Постановка задачи:
Дано: Схема механизма, размеры – HC= HF, β,
λ2=
Постановка задачи:
Дано: Схема механизма, размеры – HC= HF, β,
λ2=
Кинематический анализ плоского рычажного
механизма методом планов
Назад…
Далее…
μl = … мм/м
Кинематическая
Кинематический анализ плоского рычажного
механизма методом планов
Назад…
Далее…
μl = … мм/м
Кинематическая
Кинематический анализ плоского рычажного
механизма методом планов
Назад…
Далее…
μl = … мм/м
Кинематическая
Кинематический анализ плоского рычажного
механизма методом планов
Назад…
Далее…
μl = … мм/м
Кинематическая
Кинематический анализ плоского рычажного
механизма методом планов
Назад…
Далее…
Кинематическая схема механизма (план
Кинематический анализ плоского рычажного
механизма методом планов
Назад…
Далее…
Кинематическая схема механизма (план
Кинематический анализ плоского рычажного
механизма методом планов
Назад…
Далее…
b
VB
μV = … мм/(м⋅с-1)
плоское
Кинематический анализ плоского рычажного
механизма методом планов
Назад…
Далее…
b
VB
μV = … мм/(м⋅с-1)
плоское
Кинематический анализ плоского рычажного
механизма методом планов
Назад…
Далее…
μV = … мм/(м⋅с-1)
плоское
Кинематический анализ плоского рычажного
механизма методом планов
Назад…
Далее…
μV = … мм/(м⋅с-1)
плоское
Кинематический анализ плоского рычажного
механизма методом планов
Назад…
Далее…
VS2
Скорость точки S2
Кинематический анализ плоского рычажного
механизма методом планов
Назад…
Далее…
VS2
Скорость точки S2
Кинематический анализ плоского рычажного
механизма методом планов
Назад…
Далее…
VS2
Скорость точки S4
Кинематический анализ плоского рычажного
механизма методом планов
Назад…
Далее…
VS2
Скорость точки S4
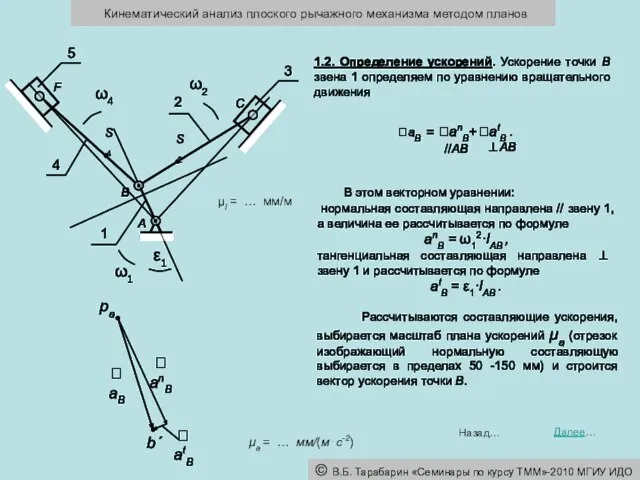
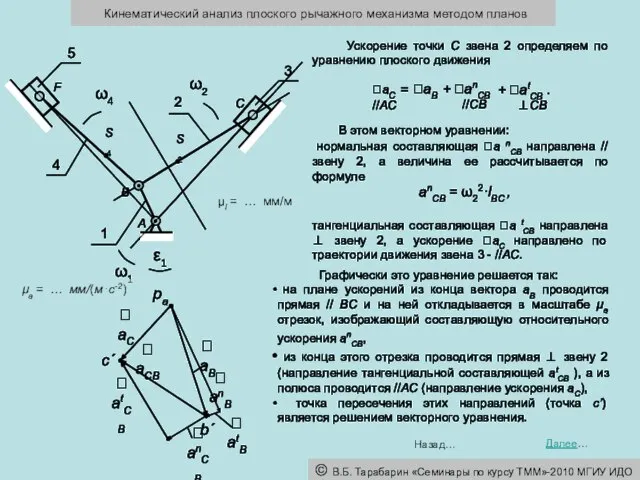
1.2. Определение ускорений. Ускорение точки В звена 1 определяем по уравнению
1.2. Определение ускорений. Ускорение точки В звена 1 определяем по уравнению
b´
μa = … мм/(м⋅с-2)
Кинематический анализ плоского рычажного механизма методом планов
b´
μa = … мм/(м⋅с-2)
Кинематический анализ плоского рычажного механизма методом планов
μa = … мм/(м⋅с-2)
Кинематический анализ плоского рычажного механизма методом планов
μa = … мм/(м⋅с-2)
Кинематический анализ плоского рычажного механизма методом планов
μa = … мм/(м⋅с-2)
Кинематический анализ плоского рычажного механизма методом планов
μa = … мм/(м⋅с-2)
Кинематический анализ плоского рычажного механизма методом планов
μa = … мм/(м⋅с-2)
Кинематический анализ плоского рычажного механизма методом планов
μa = … мм/(м⋅с-2)
Кинематический анализ плоского рычажного механизма методом планов
μa = … мм/(м⋅с-2)
Кинематический анализ плоского рычажного механизма методом планов
μa = … мм/(м⋅с-2)
Кинематический анализ плоского рычажного механизма методом планов
Кинематический анализ плоского рычажного механизма методом планов
Назад…
Далее…
© В.Б. Тарабарин
Кинематический анализ плоского рычажного механизма методом планов
Назад…
Далее…
© В.Б. Тарабарин
Кинематический анализ плоского рычажного механизма методом планов
Назад…
Далее…
Пример оформления раздела
Кинематический анализ плоского рычажного механизма методом планов
Назад…
Далее…
Пример оформления раздела
 Закон Ома (4.02.22)
Закон Ома (4.02.22) Задачи метрологии
Задачи метрологии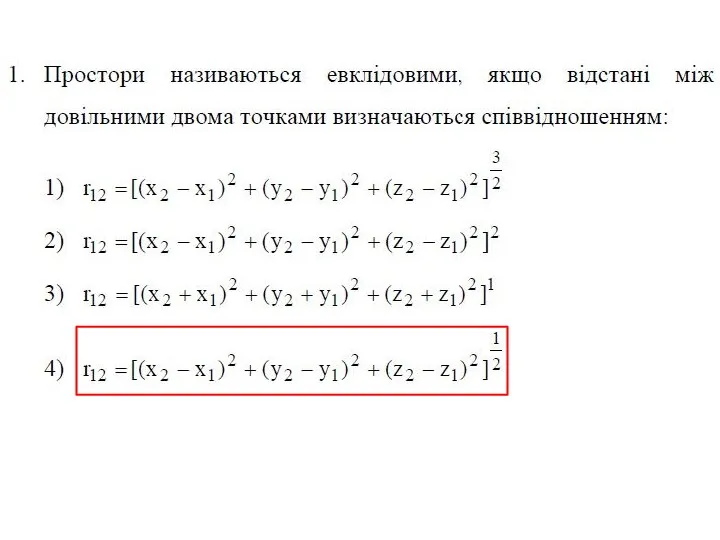 Законы физики
Законы физики ІІ закон термодинаміки
ІІ закон термодинаміки  Технологический процесс механической обработки детали редуктора трактора МТЗ-80
Технологический процесс механической обработки детали редуктора трактора МТЗ-80 Презентация по физике "Самый знаменитый из ученых XX в" - скачать
Презентация по физике "Самый знаменитый из ученых XX в" - скачать  Тормозная систеса тракторов
Тормозная систеса тракторов Биофизика, как наука
Биофизика, как наука Творческое название
Творческое название Звуки
Звуки  Дефекты кристаллического строения
Дефекты кристаллического строения Расчет магнитных параметров катушки индуктивности
Расчет магнитных параметров катушки индуктивности Создание фонтанов
Создание фонтанов Случайные блуждания и их компьютерное моделирование 2020
Случайные блуждания и их компьютерное моделирование 2020 Устройство машинной иглы
Устройство машинной иглы РАВНОМЕРНОЕ ДВИЖЕНИЕ Механическое движение: перемещение, скорость, ускорение
РАВНОМЕРНОЕ ДВИЖЕНИЕ Механическое движение: перемещение, скорость, ускорение Сварочная дуга как источник тепла
Сварочная дуга как источник тепла Пожар, как комплекс физических и химических процессов и явлений. Параметры развития пожара
Пожар, как комплекс физических и химических процессов и явлений. Параметры развития пожара Автор: Алексеев Н., ученик 7-А класса МОБУ СОШ №3 Руководитель: Иванова Л.М., учитель физики
Автор: Алексеев Н., ученик 7-А класса МОБУ СОШ №3 Руководитель: Иванова Л.М., учитель физики Световые явления в живой и неживой природе
Световые явления в живой и неживой природе Коэффициент полезного действия (КПД) тепловых двигателей
Коэффициент полезного действия (КПД) тепловых двигателей Характер философского знания и задачи философии
Характер философского знания и задачи философии Жидкостно-сцинтилляционная спектроскопия
Жидкостно-сцинтилляционная спектроскопия Внешний фотоэффект. Эффект Комптона
Внешний фотоэффект. Эффект Комптона Модели генераторов в расчетах УР
Модели генераторов в расчетах УР Сила тяжести. Вес тела
Сила тяжести. Вес тела Инфрақызыл сәулелердің тірі ағзаға әсері
Инфрақызыл сәулелердің тірі ағзаға әсері Уравнение состояния идеального газа Менделеева-Клапейрона. Газовые законы
Уравнение состояния идеального газа Менделеева-Клапейрона. Газовые законы