- Кинематика. Основные понятия

Содержание
- 2. К И Н Е М А Т И К А Основные понятия: система отсчета ( С
- 3. Различают движения Прямолинейное, криволинейное – по типу траектории. Равномерное , неравномерное, равнопеременное – по виду кинематических
- 4. внимание ! Используются обозначения: Учебник Лекции, МУ Радиус-вектор r Вектор скорости v Вектор ускорения а
- 5. CО = СК + ТО + часы Система отсчета определяет положение тела в любой момент времени.
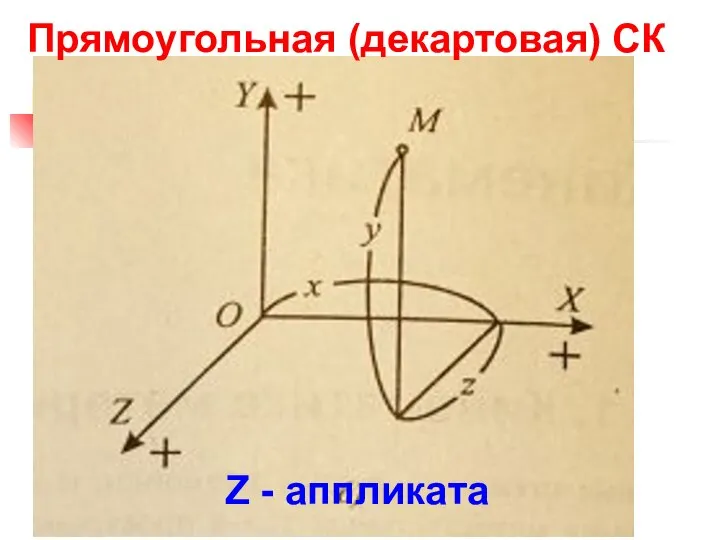
- 6. Прямоугольная (декартовая) СК Z - аппликата
- 7. Полярная СК на плоскости О – полюс; ОР – полярная ось; радиус – вектор точки М;
- 8. - аналог полярных координат в пространстве
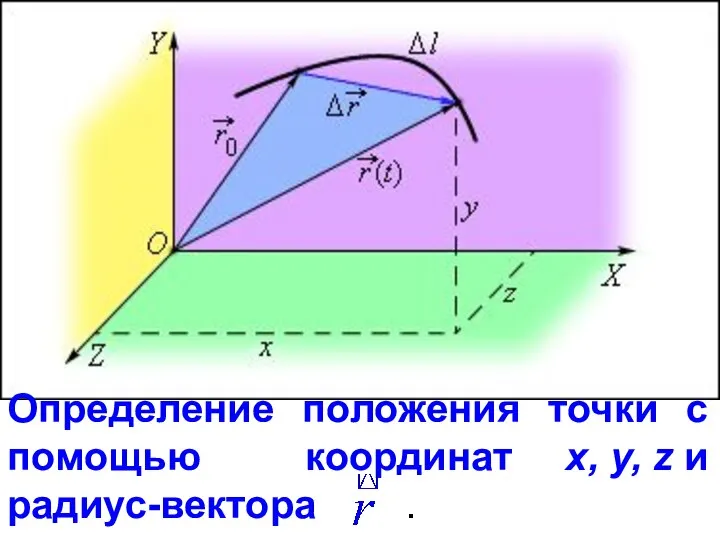
- 9. Определение положения точки с помощью координат x, y, z и радиус-вектора .
- 10. Радиус - вектор задает положение МТ в пространстве: МТ - орты системы координат, координаты МТ, -
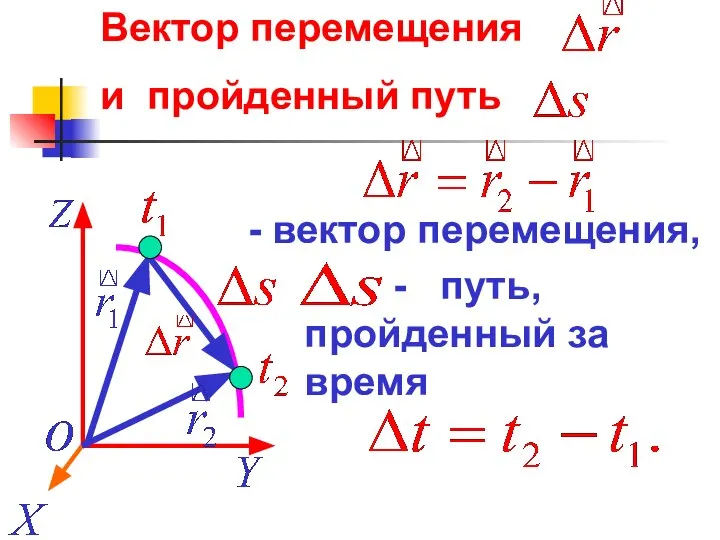
- 11. Вектор перемещения и пройденный путь - вектор перемещения, - путь, пройденный за время
- 12. - пройденный путь - вектор перемещения
- 13. За бесконечно малый промежуток времени вектор перемещения , пройденный путь при прямолинейном движении без поворота. Но
- 14. Вектор средней скорости - средняя путевая скорость Скорость характеризует быстроту изменения положения МТ в пространстве. модуль
- 15. Вектор мгновенной cкорости ( в данный момент времени) Модуль мгновенной скорости
- 16. Вектор скорости направлен по касательной к траектории, вектор - по вектору перемещения
- 17. Скорость и ее проекции связаны соотношением: (движение в плоскости ХОУ). y x Проекция на ось Х
- 18. Закон сложения скоростей cкорость тела в «неподвижной» cистеме отсчета (абсолютная); cкорость тела в «движущейся» cистеме отсчета
- 19. Ускорение Характеризует быстроту изменения скорости по величине и направлению. вектор среднего ускорения , направлен по вектору
- 20. Вектор ускорения в данный момент времени – производ- ная вектора скорости по времени : Проекции вектора
- 21. Ускорение и его проекции связаны соотношением: 0 Модуль Х У
- 22. - тангенциальное ускорение - нормальное ускорение - 0 Проекции на направления касательной к траектории и нормали
- 23. Движение по дугам окружностей
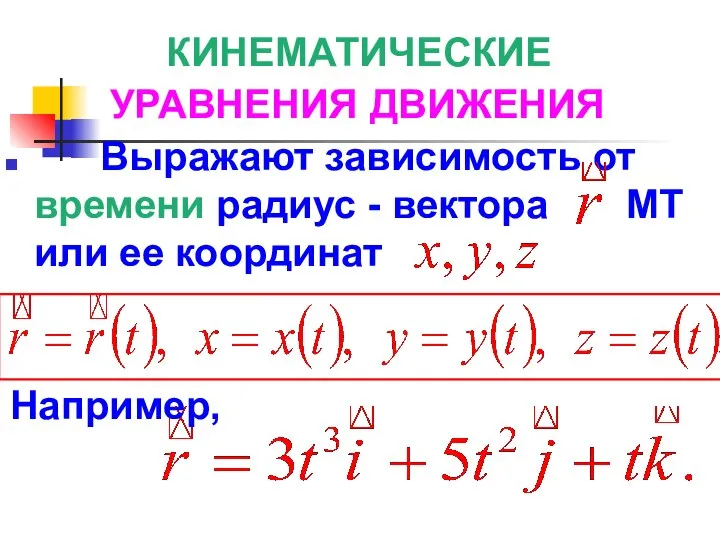
- 24. КИНЕМАТИЧЕСКИЕ УРАВНЕНИЯ ДВИЖЕНИЯ Выражают зависимость от времени радиус - вектора МТ или ее координат Например,
- 25. Скорость МТ ее ускорение Для МТ, движущейся вдоль оси Х:
- 27. Скачать презентацию
К И Н Е М А Т И К А
Основные
К И Н Е М А Т И К А
Основные
Различают движения
Прямолинейное, криволинейное – по типу траектории.
Равномерное , неравномерное,
Различают движения
Прямолинейное, криволинейное – по типу траектории.
Равномерное , неравномерное,
внимание !
Используются обозначения:
Учебник Лекции, МУ
Радиус-вектор
r
Вектор
внимание !
Используются обозначения:
Учебник Лекции, МУ
Радиус-вектор
r
Вектор

CО = СК + ТО + часы
Система отсчета определяет положение тела
CО = СК + ТО + часы
Система отсчета определяет положение тела
Прямоугольная (декартовая) СК
Z - аппликата
Прямоугольная (декартовая) СК
Z - аппликата
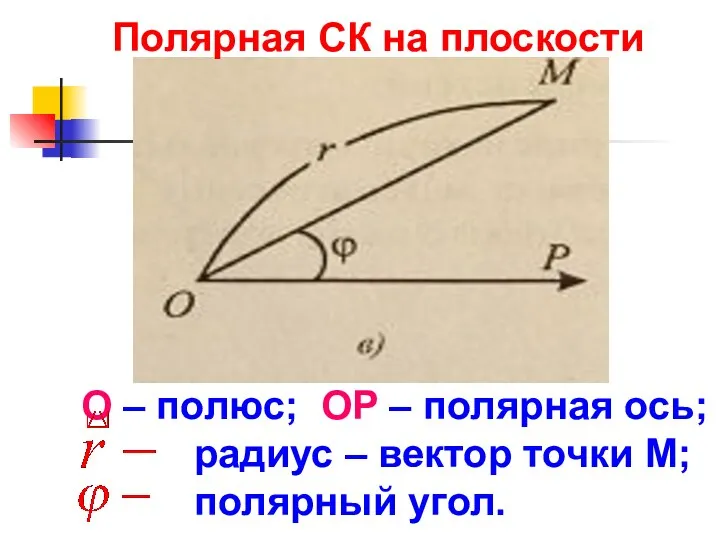
Полярная СК на плоскости
О – полюс; ОР – полярная ось;
Полярная СК на плоскости
О – полюс; ОР – полярная ось;

- аналог полярных координат в
пространстве
- аналог полярных координат в
пространстве
Определение положения точки с помощью координат x, y, z и радиус-вектора .
Определение положения точки с помощью координат x, y, z и радиус-вектора .

Радиус - вектор
задает положение МТ в пространстве:
МТ
- орты системы
Радиус - вектор
задает положение МТ в пространстве:
МТ
- орты системы
Вектор перемещения
и пройденный путь
- вектор перемещения,
- путь, пройденный
Вектор перемещения
и пройденный путь
- вектор перемещения,
- путь, пройденный

- пройденный путь
- вектор перемещения
- пройденный путь
- вектор перемещения

За бесконечно малый промежуток времени вектор перемещения , пройденный путь
при
За бесконечно малый промежуток времени вектор перемещения , пройденный путь
при
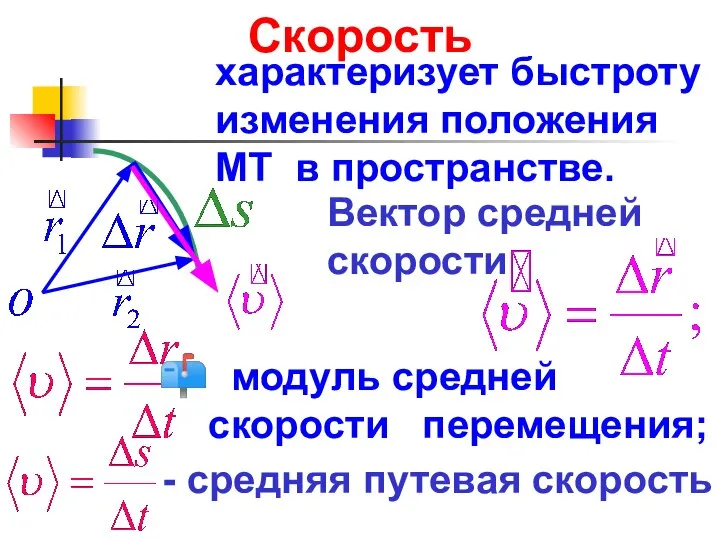
Вектор средней скорости
- средняя путевая скорость
Скорость
характеризует быстроту
изменения положения
Вектор средней скорости
- средняя путевая скорость
Скорость
характеризует быстроту
изменения положения
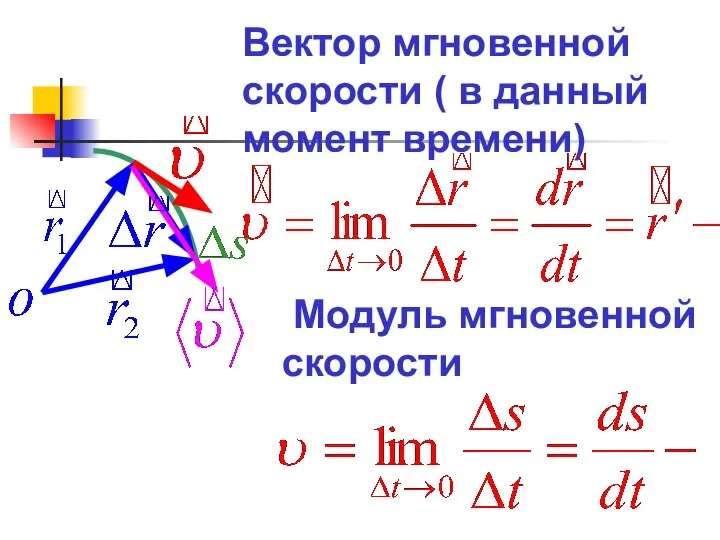
Вектор мгновенной cкорости ( в данный момент времени)
Модуль мгновенной скорости
Вектор мгновенной cкорости ( в данный момент времени)
Модуль мгновенной скорости

Вектор скорости направлен по
касательной к траектории, вектор
- по
Вектор скорости направлен по
касательной к траектории, вектор
- по
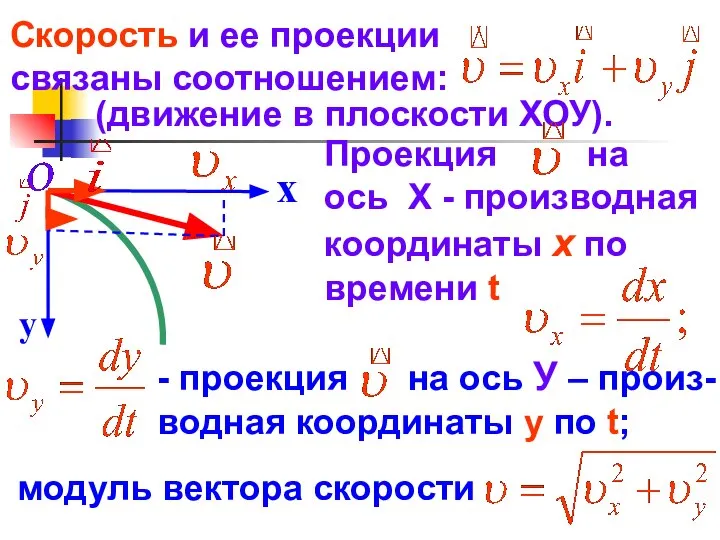
Скорость и ее проекции связаны соотношением:
(движение в плоскости ХОУ).
y
x
Проекция на ось
Скорость и ее проекции связаны соотношением:
(движение в плоскости ХОУ).
y
x
Проекция на ось
Закон сложения скоростей
cкорость тела в «неподвижной»
cистеме отсчета (абсолютная);
cкорость
Закон сложения скоростей
cкорость тела в «неподвижной»
cистеме отсчета (абсолютная);
cкорость
Ускорение
Характеризует быстроту
изменения скорости по величине и направлению.
вектор среднего
ускорения
Ускорение
Характеризует быстроту
изменения скорости по величине и направлению.
вектор среднего
ускорения
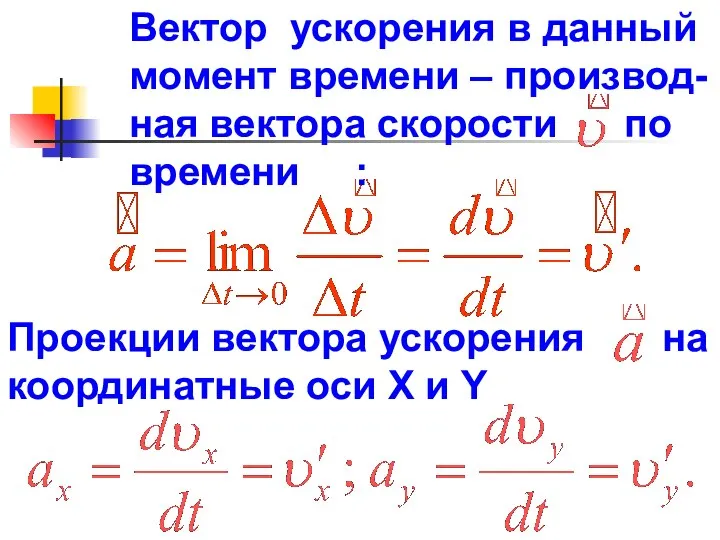
Вектор ускорения в данный момент времени – производ-
ная вектора скорости по
Вектор ускорения в данный момент времени – производ-
ная вектора скорости по

Ускорение и его проекции связаны соотношением:
0
Модуль
Х
У
Ускорение и его проекции связаны соотношением:
0
Модуль
Х
У
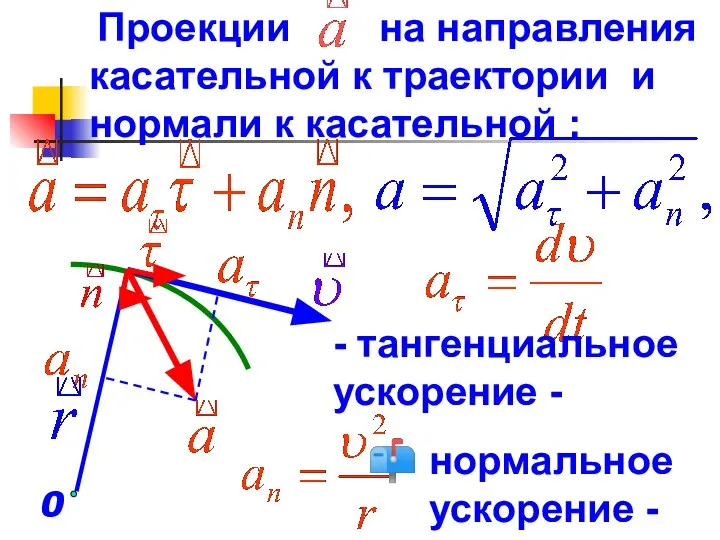
- тангенциальное ускорение -
нормальное
ускорение -
0
Проекции на направления касательной
- тангенциальное ускорение -
нормальное
ускорение -
0
Проекции на направления касательной

Движение по дугам окружностей
Движение по дугам окружностей
КИНЕМАТИЧЕСКИЕ
УРАВНЕНИЯ ДВИЖЕНИЯ
Выражают зависимость от времени радиус - вектора
КИНЕМАТИЧЕСКИЕ
УРАВНЕНИЯ ДВИЖЕНИЯ
Выражают зависимость от времени радиус - вектора
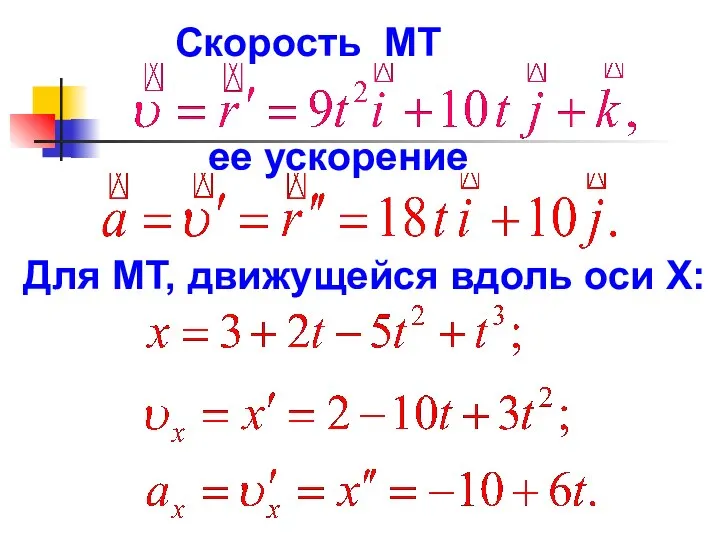
Скорость МТ
ее ускорение
Для МТ, движущейся вдоль оси Х:
Скорость МТ
ее ускорение
Для МТ, движущейся вдоль оси Х:
 Терморезистор
Терморезистор Конденсатор. Емкость конденсатора. Энергия электрического поля конденсатора
Конденсатор. Емкость конденсатора. Энергия электрического поля конденсатора Аналогии физических свойств сегнетоэлектрических и ферромагнитных кристаллов
Аналогии физических свойств сегнетоэлектрических и ферромагнитных кристаллов Особенности размещения электронов по орбиталям в атомах малых и больших периодов
Особенности размещения электронов по орбиталям в атомах малых и больших периодов Внутренняя энергия и работа в термодинамике
Внутренняя энергия и работа в термодинамике Презентация по физике Три состояния вещества Физика 7 класс
Презентация по физике Три состояния вещества Физика 7 класс  Кипение Выполнила Шумская О.В. ГБОУ СОШ №201
Кипение Выполнила Шумская О.В. ГБОУ СОШ №201 УРОК ФИЗИКИ В 10 КЛАССЕ Лабораторная работа №3 «Опытная проверка закона Гей – Люссака» Учитель Кононов Геннадий
УРОК ФИЗИКИ В 10 КЛАССЕ Лабораторная работа №3 «Опытная проверка закона Гей – Люссака» Учитель Кононов Геннадий  Петрофизика в свете геофизики
Петрофизика в свете геофизики Рисунки к газовым смесям
Рисунки к газовым смесям Физические и химические явления
Физические и химические явления Экономия электрической энергии и использование энергоэффективных ламп
Экономия электрической энергии и использование энергоэффективных ламп Яблоко Ньютона и подлинная история открытия закона всемирного тяготения
Яблоко Ньютона и подлинная история открытия закона всемирного тяготения Колебания-1. Гармоническое колебание и его характеристики. Модель гармонического осциллятора
Колебания-1. Гармоническое колебание и его характеристики. Модель гармонического осциллятора Строение атома. Урок №7
Строение атома. Урок №7 Индукционные и высокочастотные установки
Индукционные и высокочастотные установки Интенсивность звука в идеальной жидкости
Интенсивность звука в идеальной жидкости Кинематический анализ
Кинематический анализ Электромагнитная картина мира (ЭМКМ). Специальная и общая теории относительности
Электромагнитная картина мира (ЭМКМ). Специальная и общая теории относительности Облака
Облака Основні визначення. Характеристики надійності об'єкта
Основні визначення. Характеристики надійності об'єкта Основы классической теории электропроводности металлов
Основы классической теории электропроводности металлов Измерение параметров лазерного излучения
Измерение параметров лазерного излучения Изучение основных электрофизических характеристик полупроводника
Изучение основных электрофизических характеристик полупроводника Проекитрование и производство изделий интегральной электроники. Диффузия примесей
Проекитрование и производство изделий интегральной электроники. Диффузия примесей Аналіз контрольної роботи № 1. Механічна взаємодія тіл. Сила. Види сил у механіці
Аналіз контрольної роботи № 1. Механічна взаємодія тіл. Сила. Види сил у механіці Перенапряжения в отключении малых индуктивных токов. (Лекция 2.3)
Перенапряжения в отключении малых индуктивных токов. (Лекция 2.3) Введение в физику. (Лекция 1)
Введение в физику. (Лекция 1)