- Кинематика роботов. Кинематические схемы. (Лекция 2.1)

Содержание
- 2. Часть 1. Кинематика роботов. Кинематические схемы.
- 3. Как выбрать кинематику мобильного робота ?
- 4. Колеса …
- 5. Рис.1. Формула "car_like" (автомобильная). Рис.2. Формула "differential drive".
- 6. Рис.3. Формула "omni_triangle". Рис.4. Формула "omni_quad".
- 7. Рис.5. Формула "ball_wheel".
- 8. Рис.6. Формула "mecanum_triangle". Рис.7. Формула "mecanum_quad".
- 9. ОМНИБОТ
- 10. ОМНИБОТ
- 11. Рис.8. Формула "powered_wheel". Рис.9. Формула "castor_wheel".
- 12. Сферороботы
- 13. Робот-шар SpheRob (Россия).
- 14. Tear Drop от Pegeaut (MoVille).
- 15. MotoBall. Университет Сан-Хосе, США.
- 16. Часть 2. Кинематика роботов. Робот с дифференциальным приводом.
- 17. Робот с дифференциальным пиводом – «Аргонавт-3».
- 18. Робот с дифференциальным приводом – IE-POPBOT.
- 19. Кинематические связи.
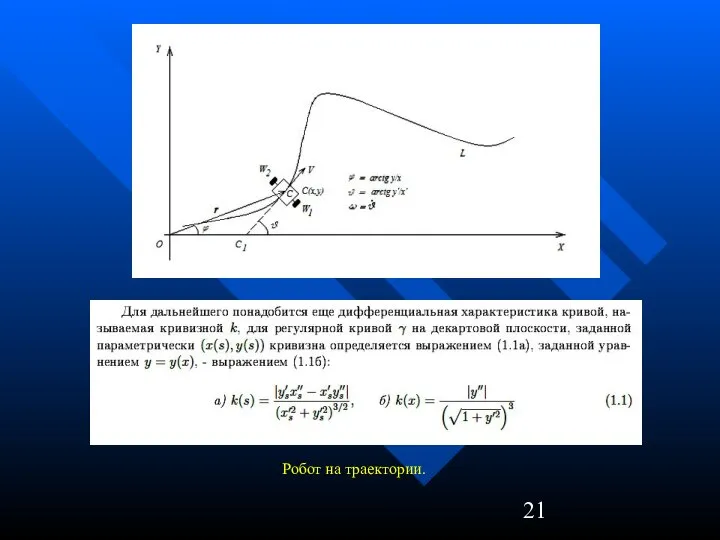
- 20. Робот на траектории.
- 21. Робот на траектории.
- 22. Кривизна траектории.
- 23. Кинематика робота с дифференциальным приводом.
- 24. Кинематика робота с дифференциальным приводом. Расчет элементарного перемещения и поворота.
- 25. Кинематика робота с дифференциальным приводом.
- 26. Кинематика робота с дифференциальным приводом. R3 R4
- 27. Кинематика робота с дифференциальным приводом.
- 28. Кинематика робота с дифференциальным приводом.
- 29. Кинематическое управление.
- 30. Кинематика робота – движение по эпитрохоиде. Циклоидальные кривые.
- 31. Кинематика робота – движение по эпитрохоиде.
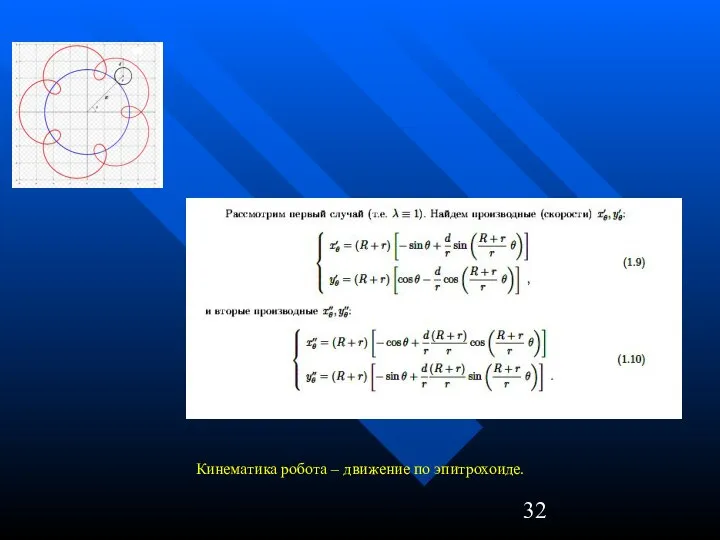
- 32. Кинематика робота – движение по эпитрохоиде.
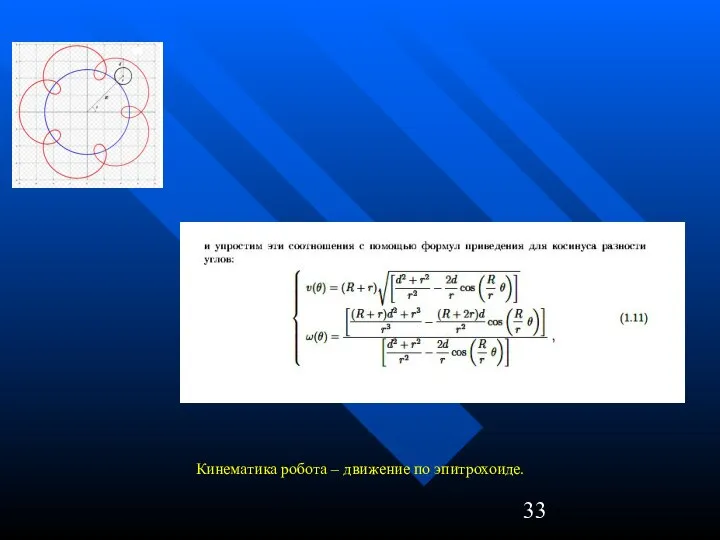
- 33. Кинематика робота – движение по эпитрохоиде.
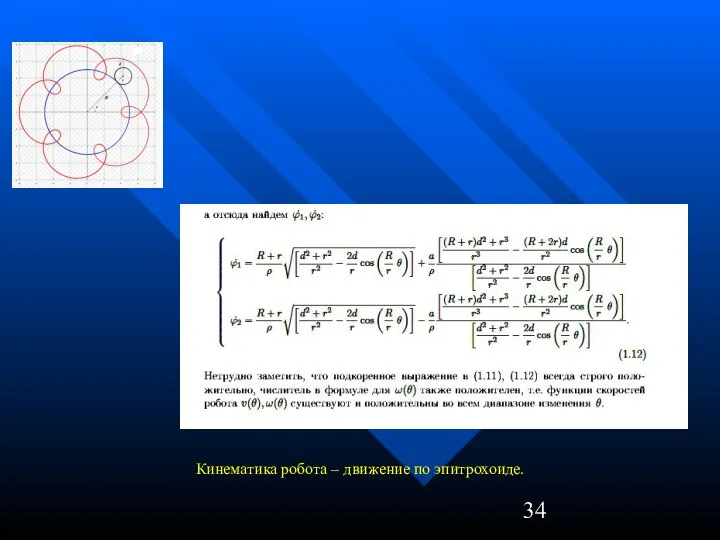
- 34. Кинематика робота – движение по эпитрохоиде.
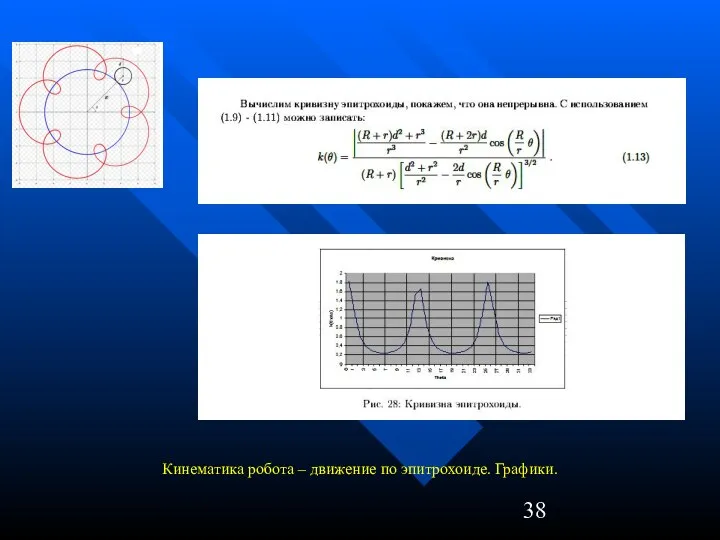
- 35. Кинематика робота – движение по эпитрохоиде. Графики.
- 36. Кинематика робота – движение по эпитрохоиде. Графики.
- 37. Кинематика робота – движение по эпитрохоиде. Графики.
- 38. Кинематика робота – движение по эпитрохоиде. Графики.
- 39. Кинематика робота. Другие циклоидальные кривые.
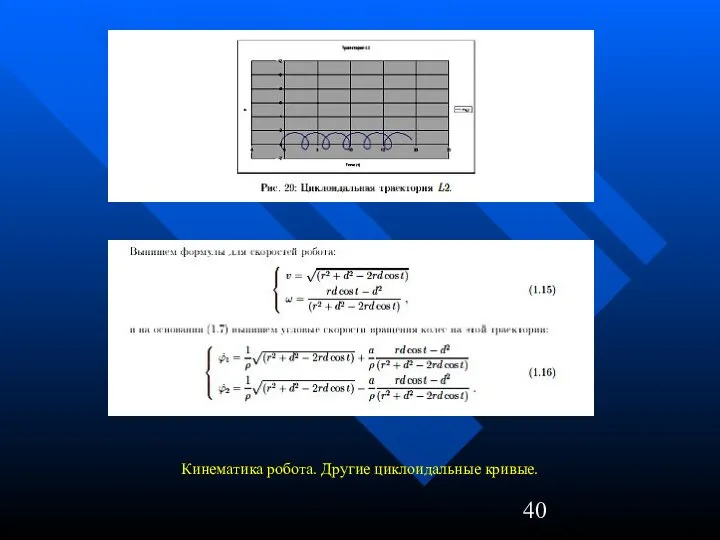
- 40. Кинематика робота. Другие циклоидальные кривые.
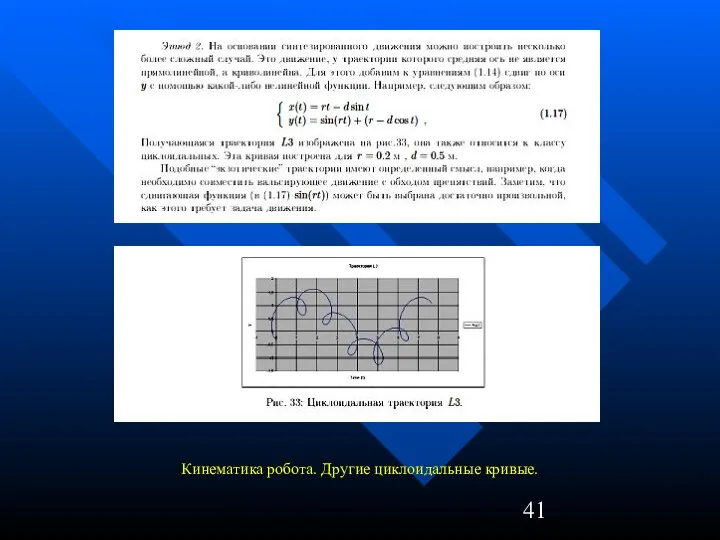
- 41. Кинематика робота. Другие циклоидальные кривые.
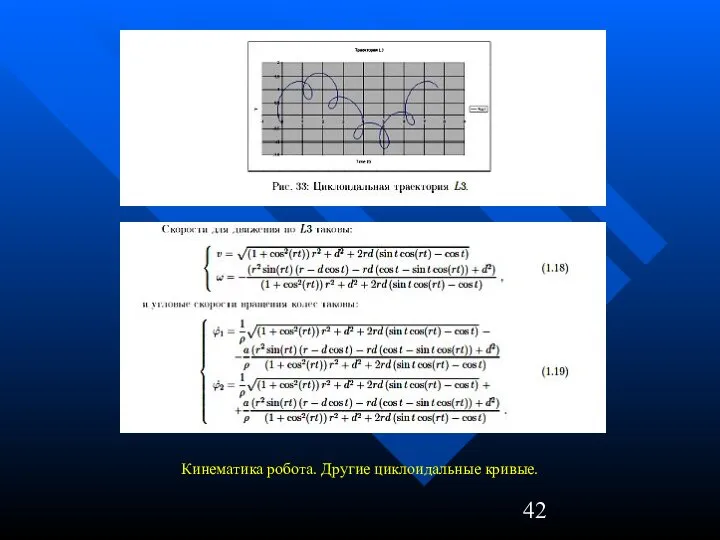
- 42. Кинематика робота. Другие циклоидальные кривые.
- 43. Кинематика робота. Движение с постоянным модулем скорости.
- 44. Кинематика робота. Движение с постоянным модулем скорости.
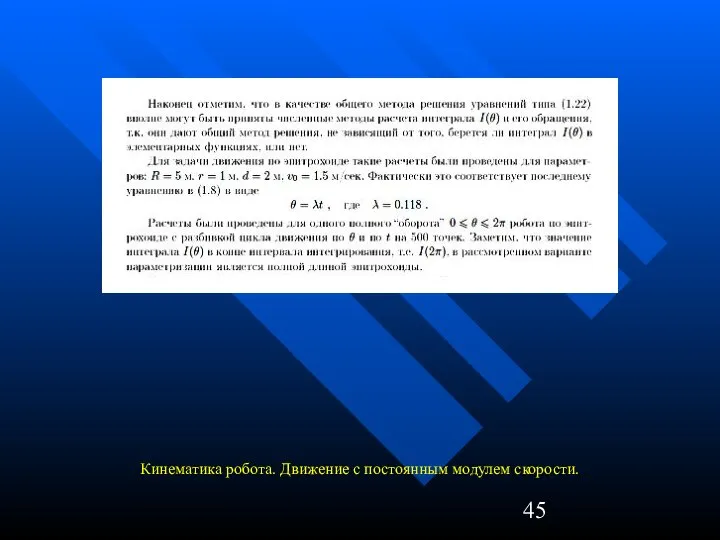
- 45. Кинематика робота. Движение с постоянным модулем скорости.
- 46. Кинематика робота. Движение с постоянным модулем скорости. Графики.
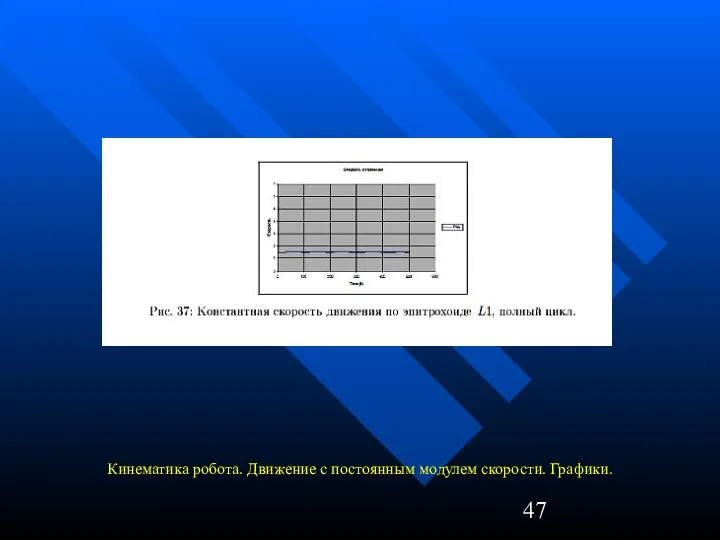
- 47. Кинематика робота. Движение с постоянным модулем скорости. Графики.
- 48. Особенности и их разрешение.
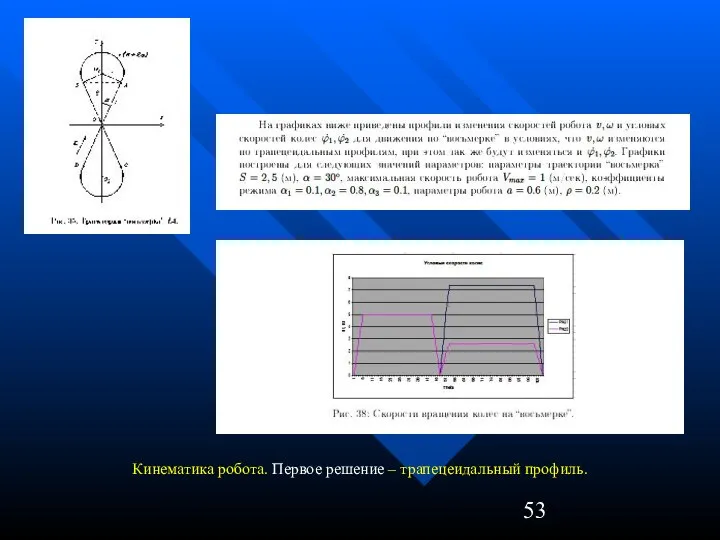
- 49. Кинематика робота. Траектория «восьмерка». особая точка А (B, C, D)
- 50. Кинематика робота. Траектория «восьмерка».
- 51. Кинематика робота. Первое решение – трапецеидальный профиль.
- 52. Кинематика робота. Первое решение – трапецеидальный профиль.
- 53. Кинематика робота. Первое решение – трапецеидальный профиль.
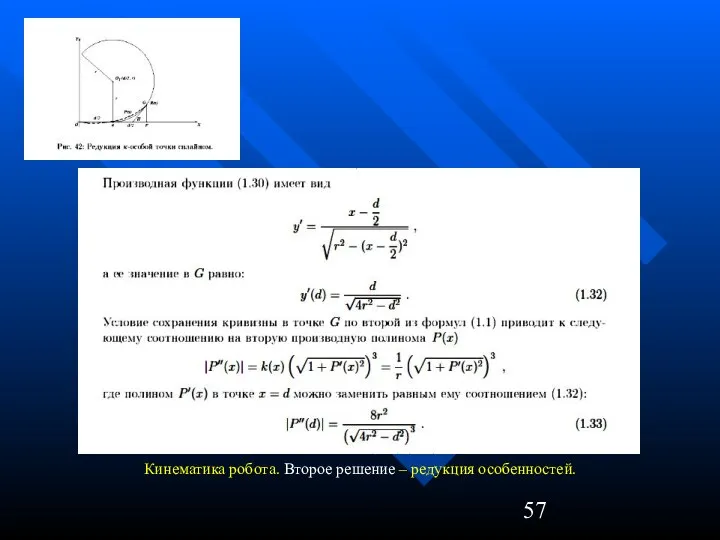
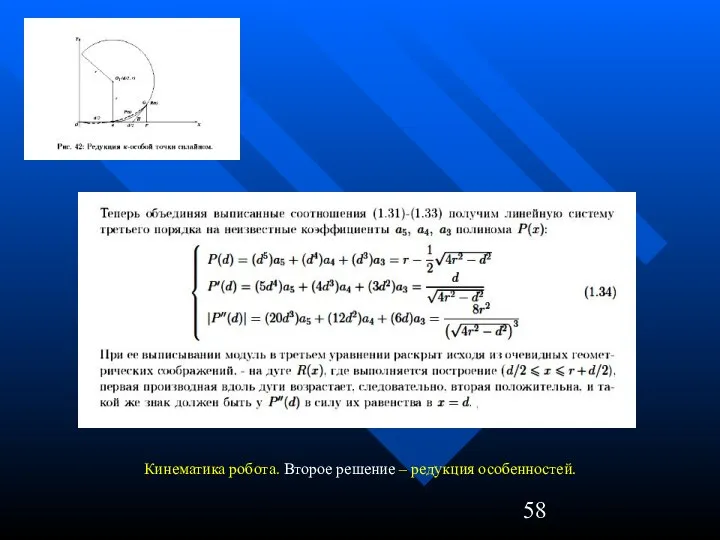
- 54. Кинематика робота. Второе решение – редукция особенностей.
- 55. Кинематика робота. Второе решение – редукция особенностей.
- 56. Кинематика робота. Второе решение – редукция особенностей.
- 57. Кинематика робота. Второе решение – редукция особенностей.
- 58. Кинематика робота. Второе решение – редукция особенностей.
- 59. Кинематика робота. Второе решение – редукция особенностей.
- 60. Кинематика робота. Второе решение – редукция особенностей.
- 61. Кинематика робота. Второе решение – редукция особенностей.
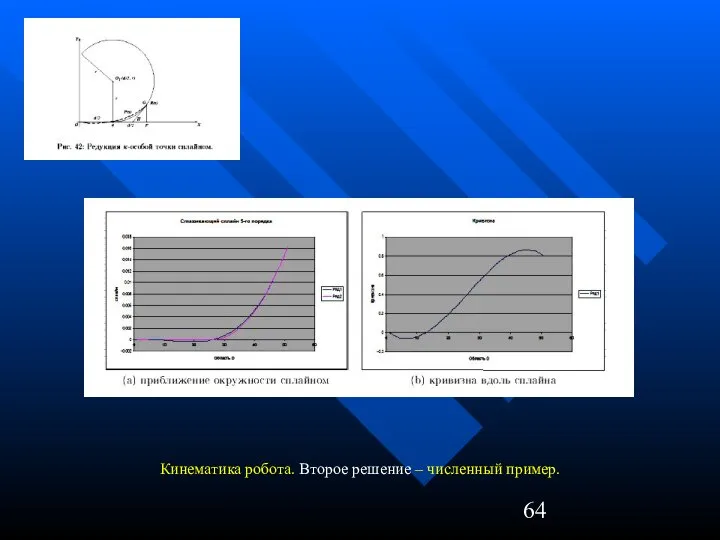
- 62. Кинематика робота. Второе решение – численный пример.
- 63. Кинематика робота. Второе решение – численный пример.
- 64. Кинематика робота. Второе решение – численный пример.
- 65. Кинематика робота. Второе решение – численный пример.
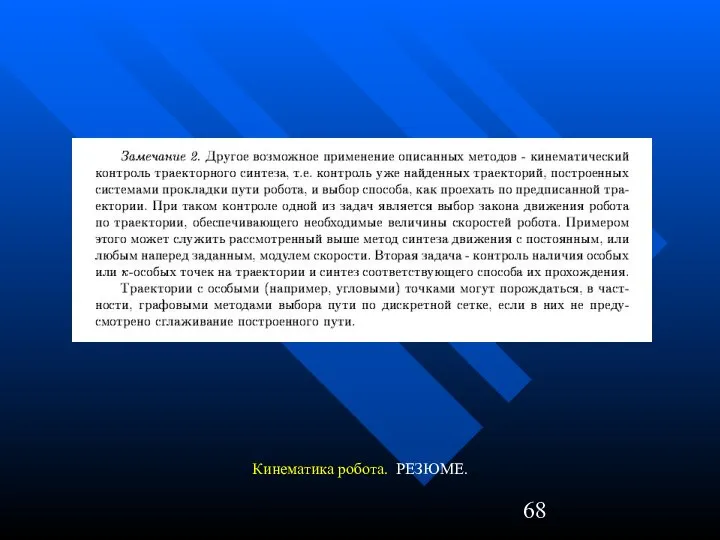
- 66. Резюме
- 67. Кинематика робота. РЕЗЮМЕ.
- 68. Кинематика робота. РЕЗЮМЕ.
- 69. Кинематика робота. РЕЗЮМЕ.
- 70. Кинематика робота. РЕЗЮМЕ.
- 72. Скачать презентацию

Часть 1. Кинематика роботов.
Кинематические схемы.
Часть 1. Кинематика роботов.
Кинематические схемы.

Как выбрать кинематику мобильного робота ?
Как выбрать кинематику мобильного робота ?

Колеса …
Колеса …

Рис.1. Формула "car_like" (автомобильная).
Рис.2. Формула "differential drive".
Рис.1. Формула "car_like" (автомобильная).
Рис.2. Формула "differential drive".
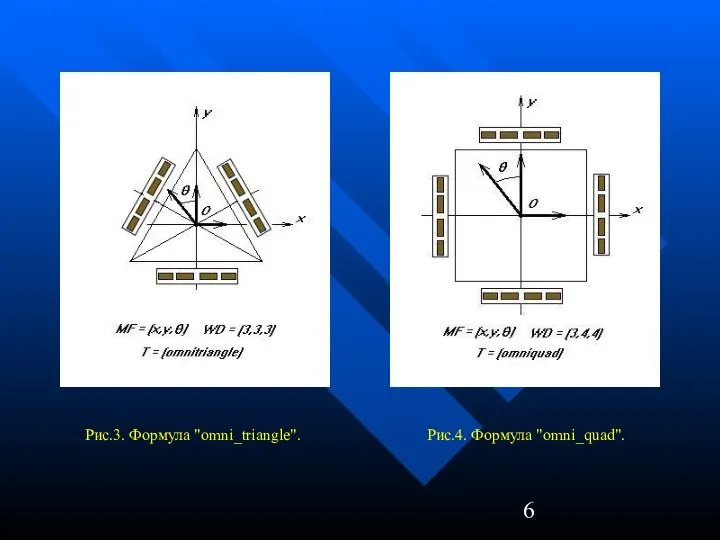
Рис.3. Формула "omni_triangle".
Рис.4. Формула "omni_quad".
Рис.3. Формула "omni_triangle".
Рис.4. Формула "omni_quad".
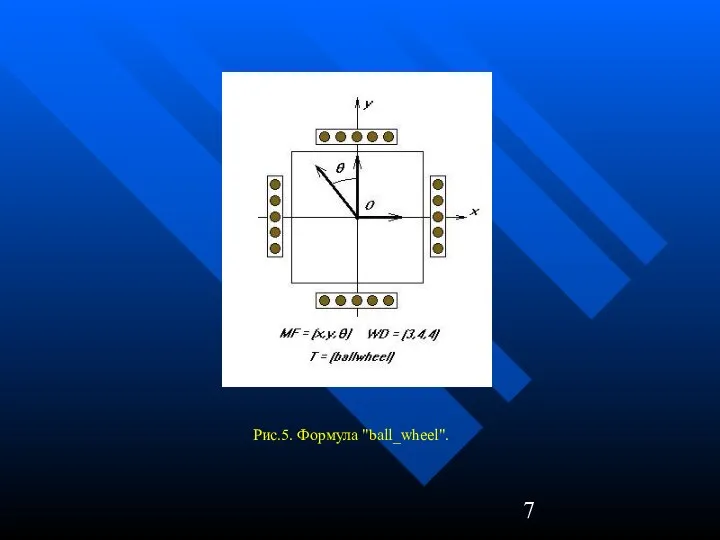
Рис.5. Формула "ball_wheel".
Рис.5. Формула "ball_wheel".

Рис.6. Формула "mecanum_triangle".
Рис.7. Формула "mecanum_quad".
Рис.6. Формула "mecanum_triangle".
Рис.7. Формула "mecanum_quad".
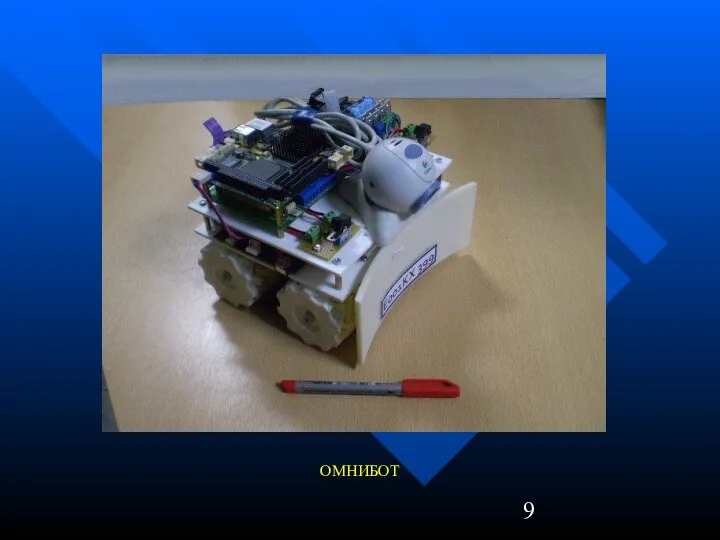
ОМНИБОТ
ОМНИБОТ
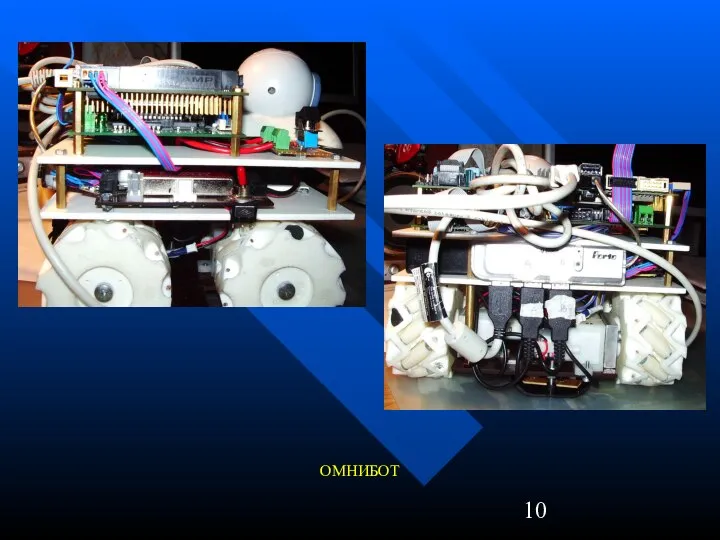
ОМНИБОТ
ОМНИБОТ
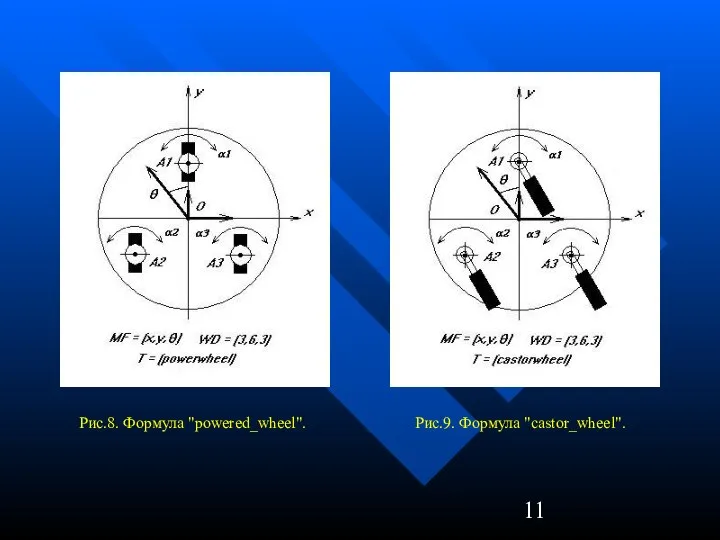
Рис.8. Формула "powered_wheel".
Рис.9. Формула "castor_wheel".
Рис.8. Формула "powered_wheel".
Рис.9. Формула "castor_wheel".
Сферороботы
Сферороботы

Робот-шар SpheRob (Россия).
Робот-шар SpheRob (Россия).

Tear Drop от Pegeaut (MoVille).
Tear Drop от Pegeaut (MoVille).
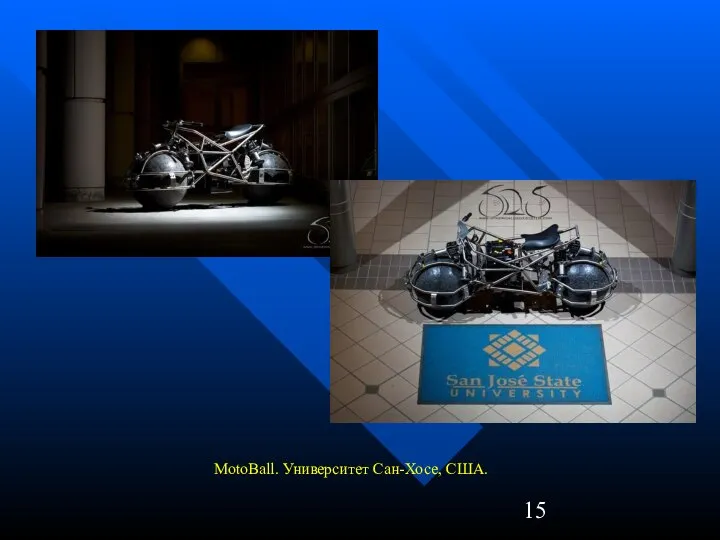
MotoBall. Университет Сан-Хосе, США.
MotoBall. Университет Сан-Хосе, США.

Часть 2. Кинематика роботов.
Робот с дифференциальным приводом.
Часть 2. Кинематика роботов.
Робот с дифференциальным приводом.

Робот с дифференциальным пиводом – «Аргонавт-3».
Робот с дифференциальным пиводом – «Аргонавт-3».

Робот с дифференциальным приводом – IE-POPBOT.
Робот с дифференциальным приводом – IE-POPBOT.
Кинематические связи.
Кинематические связи.

Робот на траектории.
Робот на траектории.
Робот на траектории.
Робот на траектории.
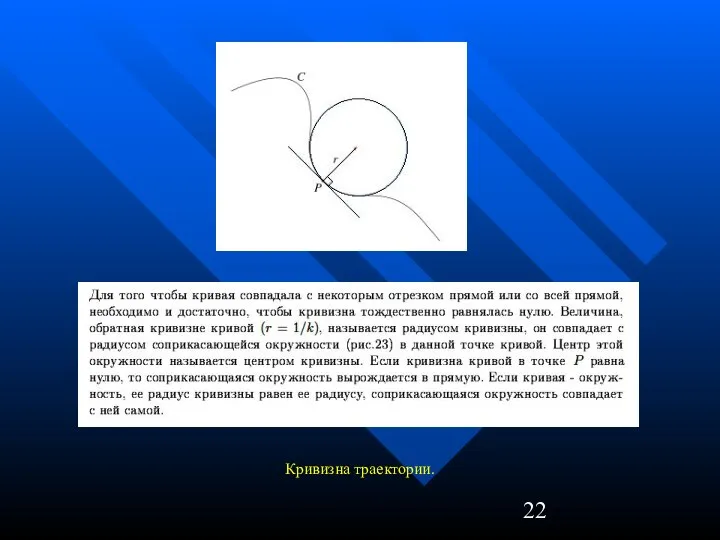
Кривизна траектории.
Кривизна траектории.

Кинематика робота с дифференциальным приводом.
Кинематика робота с дифференциальным приводом.
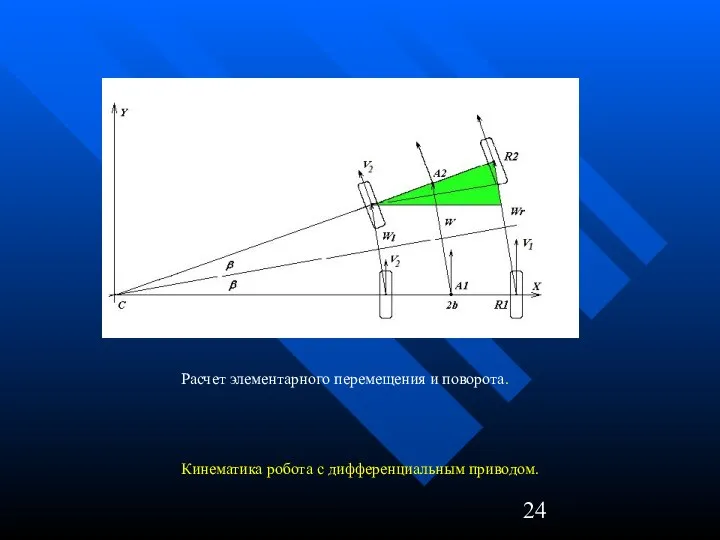
Кинематика робота с дифференциальным приводом.
Расчет элементарного перемещения и поворота.
Кинематика робота с дифференциальным приводом.
Расчет элементарного перемещения и поворота.
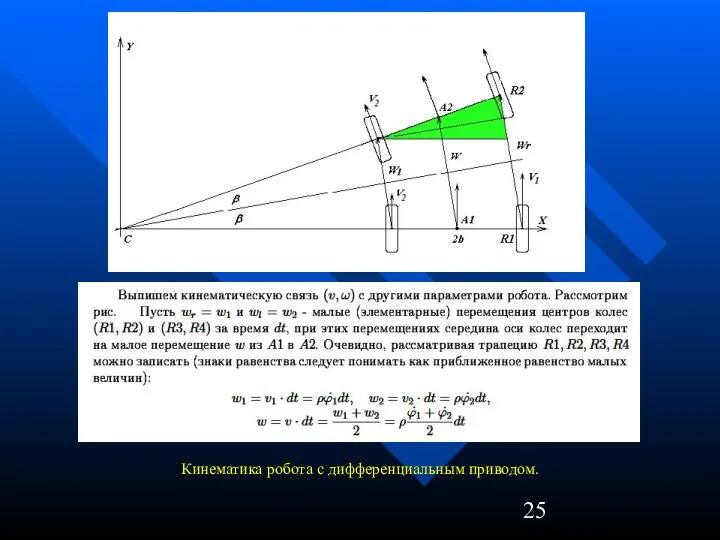
Кинематика робота с дифференциальным приводом.
Кинематика робота с дифференциальным приводом.
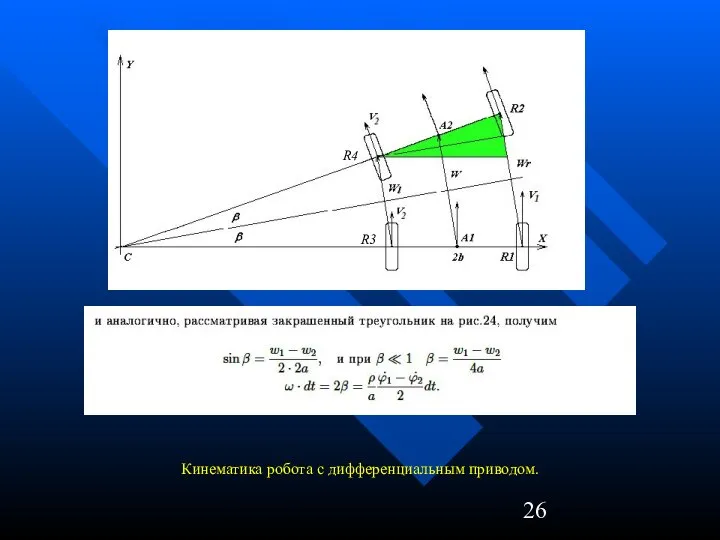
Кинематика робота с дифференциальным приводом.
R3
R4
Кинематика робота с дифференциальным приводом.
R3
R4

Кинематика робота с дифференциальным приводом.
Кинематика робота с дифференциальным приводом.

Кинематика робота с дифференциальным приводом.
Кинематика робота с дифференциальным приводом.
Кинематическое управление.
Кинематическое управление.
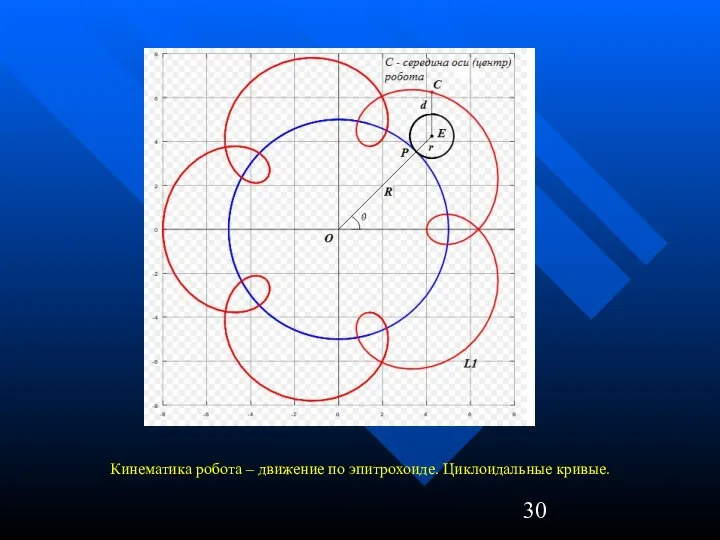
Кинематика робота – движение по эпитрохоиде. Циклоидальные кривые.
Кинематика робота – движение по эпитрохоиде. Циклоидальные кривые.
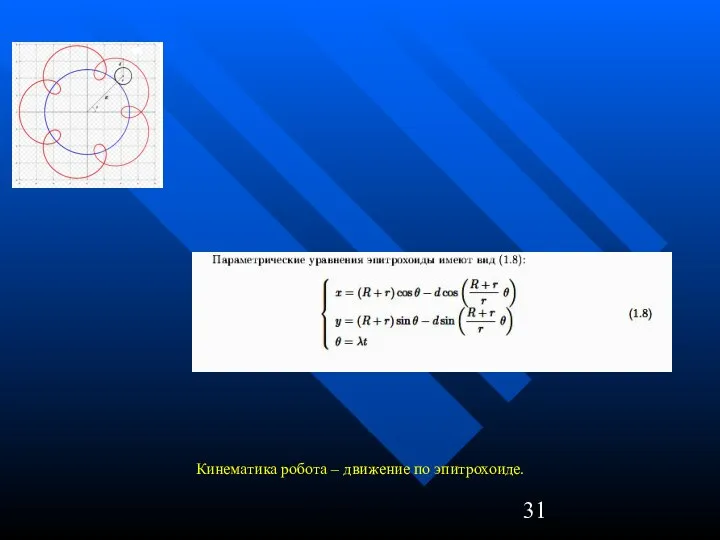
Кинематика робота – движение по эпитрохоиде.
Кинематика робота – движение по эпитрохоиде.
Кинематика робота – движение по эпитрохоиде.
Кинематика робота – движение по эпитрохоиде.
Кинематика робота – движение по эпитрохоиде.
Кинематика робота – движение по эпитрохоиде.
Кинематика робота – движение по эпитрохоиде.
Кинематика робота – движение по эпитрохоиде.
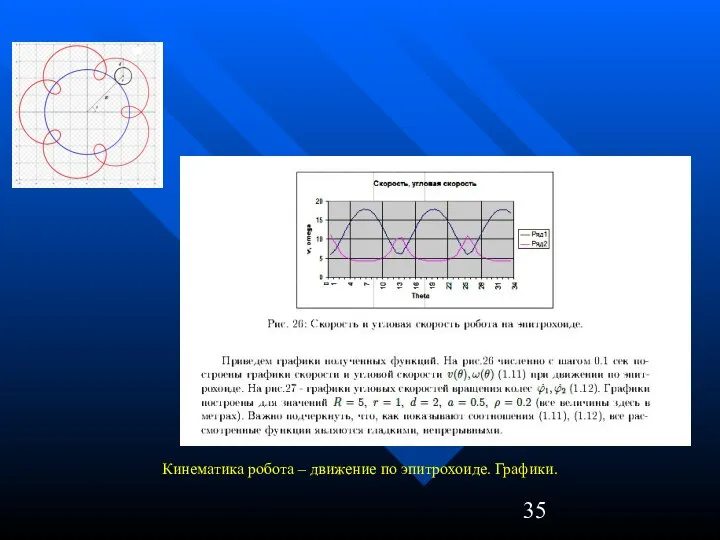
Кинематика робота – движение по эпитрохоиде. Графики.
Кинематика робота – движение по эпитрохоиде. Графики.

Кинематика робота – движение по эпитрохоиде. Графики.
Кинематика робота – движение по эпитрохоиде. Графики.

Кинематика робота – движение по эпитрохоиде. Графики.
Кинематика робота – движение по эпитрохоиде. Графики.
Кинематика робота – движение по эпитрохоиде. Графики.
Кинематика робота – движение по эпитрохоиде. Графики.
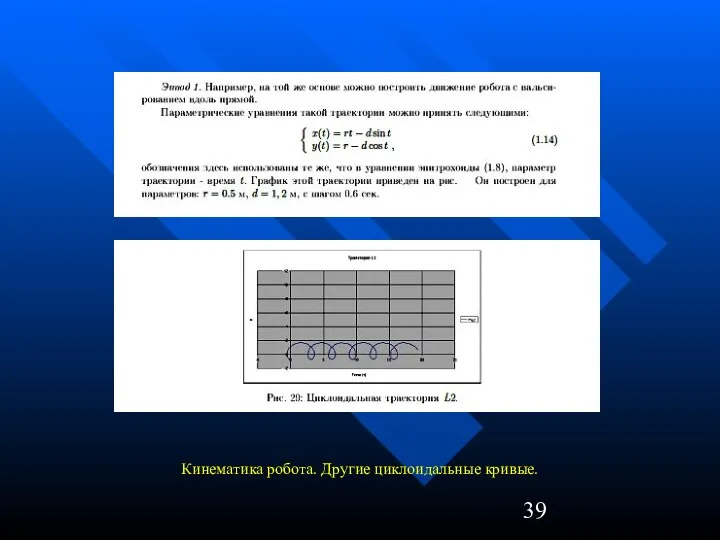
Кинематика робота. Другие циклоидальные кривые.
Кинематика робота. Другие циклоидальные кривые.
Кинематика робота. Другие циклоидальные кривые.
Кинематика робота. Другие циклоидальные кривые.
Кинематика робота. Другие циклоидальные кривые.
Кинематика робота. Другие циклоидальные кривые.
Кинематика робота. Другие циклоидальные кривые.
Кинематика робота. Другие циклоидальные кривые.

Кинематика робота. Движение с постоянным модулем скорости.
Кинематика робота. Движение с постоянным модулем скорости.

Кинематика робота. Движение с постоянным модулем скорости.
Кинематика робота. Движение с постоянным модулем скорости.
Кинематика робота. Движение с постоянным модулем скорости.
Кинематика робота. Движение с постоянным модулем скорости.

Кинематика робота. Движение с постоянным модулем скорости. Графики.
Кинематика робота. Движение с постоянным модулем скорости. Графики.
Кинематика робота. Движение с постоянным модулем скорости. Графики.
Кинематика робота. Движение с постоянным модулем скорости. Графики.
Особенности и их разрешение.
Особенности и их разрешение.
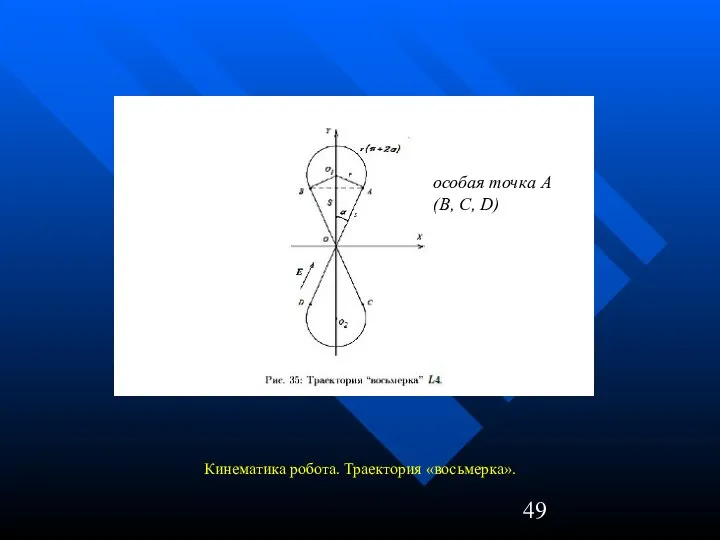
Кинематика робота. Траектория «восьмерка».
особая точка А
(B, C, D)
Кинематика робота. Траектория «восьмерка».
особая точка А
(B, C, D)
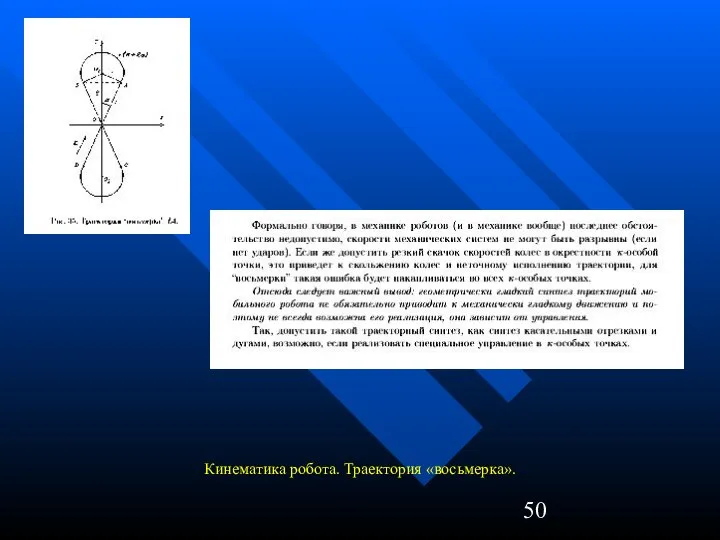
Кинематика робота. Траектория «восьмерка».
Кинематика робота. Траектория «восьмерка».
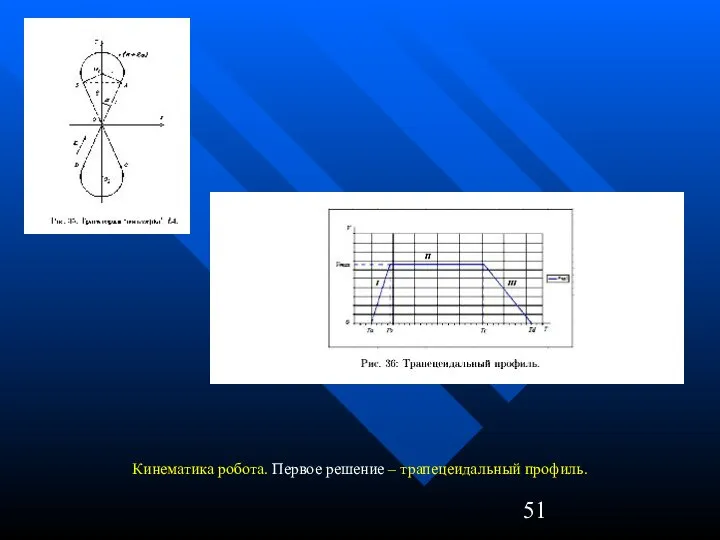
Кинематика робота. Первое решение – трапецеидальный профиль.
Кинематика робота. Первое решение – трапецеидальный профиль.
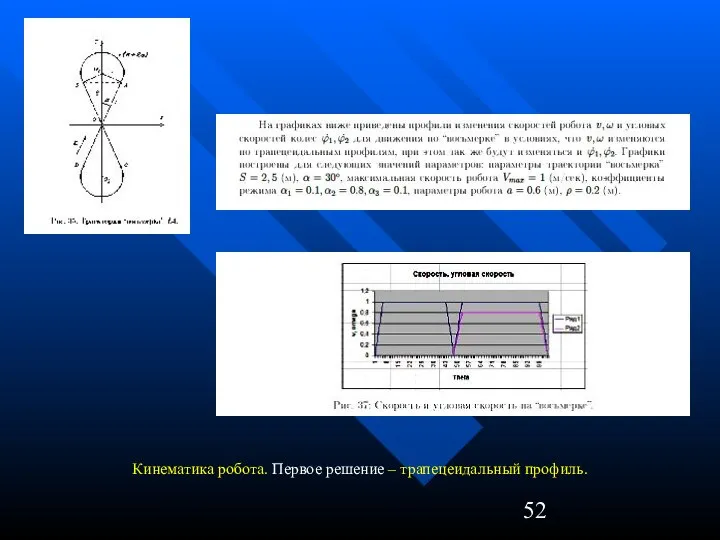
Кинематика робота. Первое решение – трапецеидальный профиль.
Кинематика робота. Первое решение – трапецеидальный профиль.
Кинематика робота. Первое решение – трапецеидальный профиль.
Кинематика робота. Первое решение – трапецеидальный профиль.

Кинематика робота. Второе решение – редукция особенностей.
Кинематика робота. Второе решение – редукция особенностей.

Кинематика робота. Второе решение – редукция особенностей.
Кинематика робота. Второе решение – редукция особенностей.

Кинематика робота. Второе решение – редукция особенностей.
Кинематика робота. Второе решение – редукция особенностей.
Кинематика робота. Второе решение – редукция особенностей.
Кинематика робота. Второе решение – редукция особенностей.
Кинематика робота. Второе решение – редукция особенностей.
Кинематика робота. Второе решение – редукция особенностей.

Кинематика робота. Второе решение – редукция особенностей.
Кинематика робота. Второе решение – редукция особенностей.

Кинематика робота. Второе решение – редукция особенностей.
Кинематика робота. Второе решение – редукция особенностей.

Кинематика робота. Второе решение – редукция особенностей.
Кинематика робота. Второе решение – редукция особенностей.

Кинематика робота. Второе решение – численный пример.
Кинематика робота. Второе решение – численный пример.

Кинематика робота. Второе решение – численный пример.
Кинематика робота. Второе решение – численный пример.
Кинематика робота. Второе решение – численный пример.
Кинематика робота. Второе решение – численный пример.
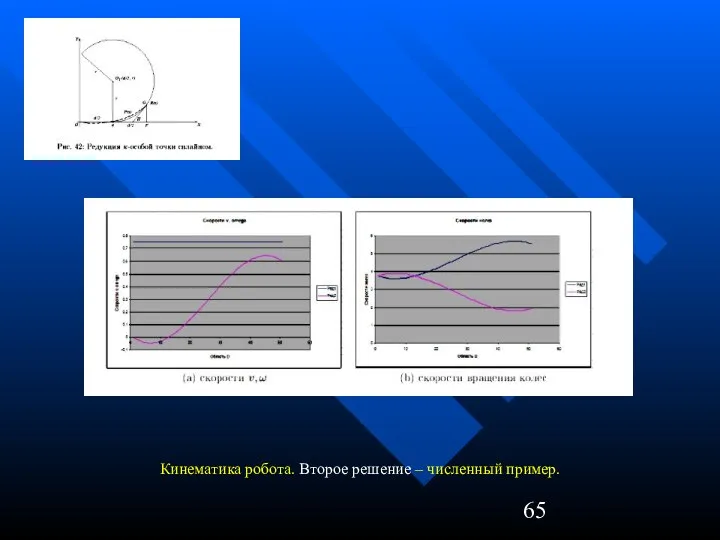
Кинематика робота. Второе решение – численный пример.
Кинематика робота. Второе решение – численный пример.

Резюме
Резюме
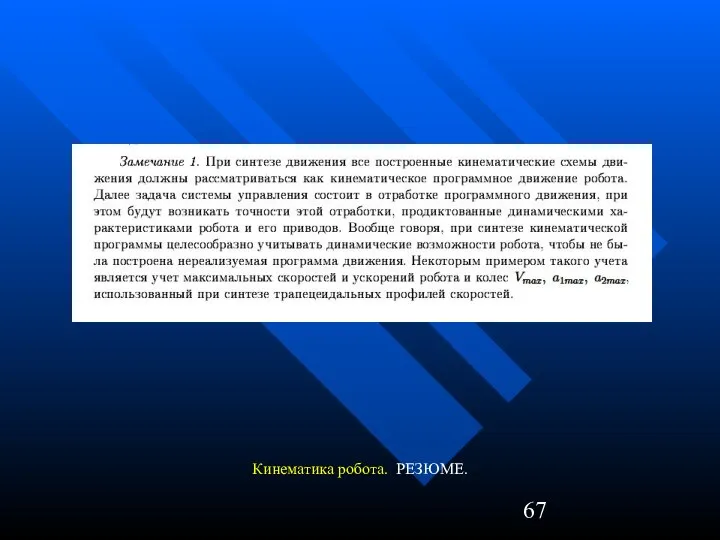
Кинематика робота. РЕЗЮМЕ.
Кинематика робота. РЕЗЮМЕ.
Кинематика робота. РЕЗЮМЕ.
Кинематика робота. РЕЗЮМЕ.

Кинематика робота. РЕЗЮМЕ.
Кинематика робота. РЕЗЮМЕ.

Кинематика робота. РЕЗЮМЕ.
Кинематика робота. РЕЗЮМЕ.
 Животная пирамида (иерархия доминирования). Эфирная традиция. Непрерывный эфир
Животная пирамида (иерархия доминирования). Эфирная традиция. Непрерывный эфир Звук. Звуковая шкала
Звук. Звуковая шкала Основные характеристики звеньев и систем. Временные характеристики
Основные характеристики звеньев и систем. Временные характеристики Радиоволны в нашей жизни Презентацию выполнили ученики 11 В класса МОУ Лицей №5 им. Ю. А. Гагарина: Мишустин Олег Алексеевич Радчен
Радиоволны в нашей жизни Презентацию выполнили ученики 11 В класса МОУ Лицей №5 им. Ю. А. Гагарина: Мишустин Олег Алексеевич Радчен Диэлектрики в электростатическом поле
Диэлектрики в электростатическом поле Кинематика вращательного движения. (Лекция 2)
Кинематика вращательного движения. (Лекция 2) Идеальная (обратимая) тепловая машина, цикл Карно
Идеальная (обратимая) тепловая машина, цикл Карно Магнитное поле
Магнитное поле It’s as an Invention
It’s as an Invention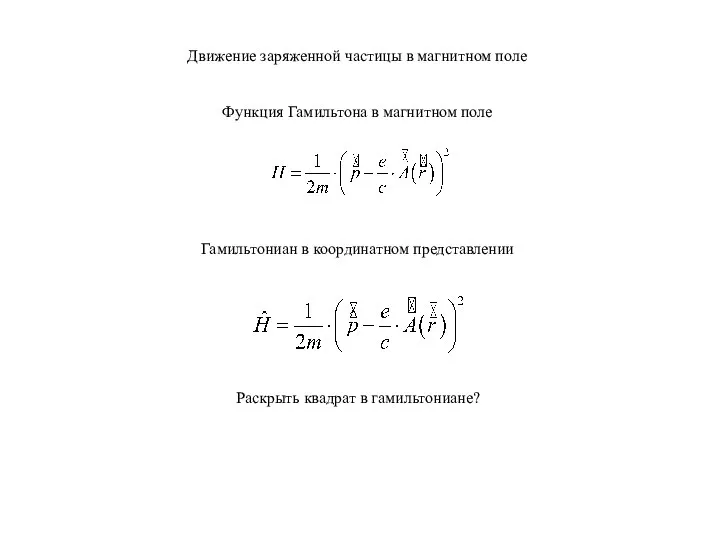 Магнитное поле, скорость, ускорение
Магнитное поле, скорость, ускорение Электрическое торможение двигателей постоянного тока. Классификация гребных электрических установок. (Билет 8)
Электрическое торможение двигателей постоянного тока. Классификация гребных электрических установок. (Билет 8) Пристрій для астрономічних спостережень - телескоп
Пристрій для астрономічних спостережень - телескоп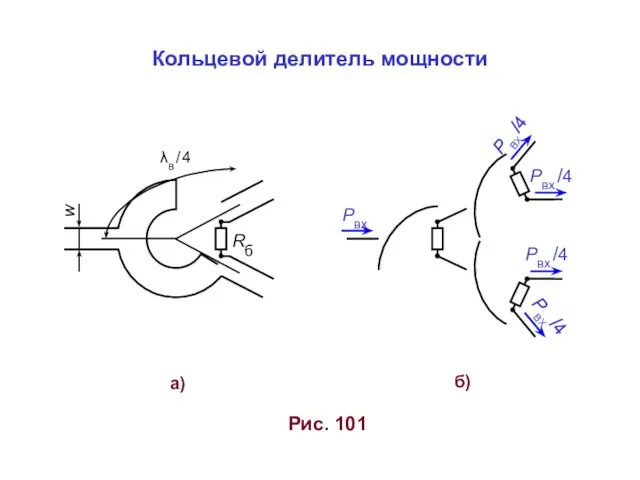 Кольцевой делитель мощности
Кольцевой делитель мощности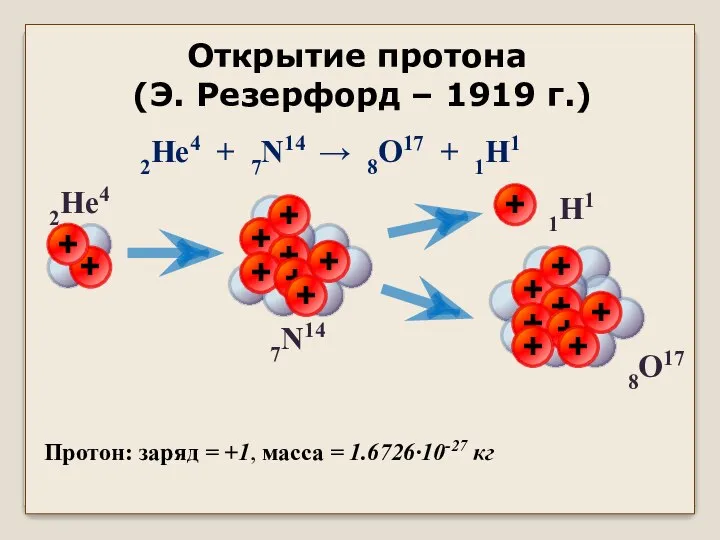 Открытие протона (Э. Резерфорд – 1919 г.)
Открытие протона (Э. Резерфорд – 1919 г.) Энергия. Кинетическая и потенциальная энергия. Вывод закона сохранения механической энергии
Энергия. Кинетическая и потенциальная энергия. Вывод закона сохранения механической энергии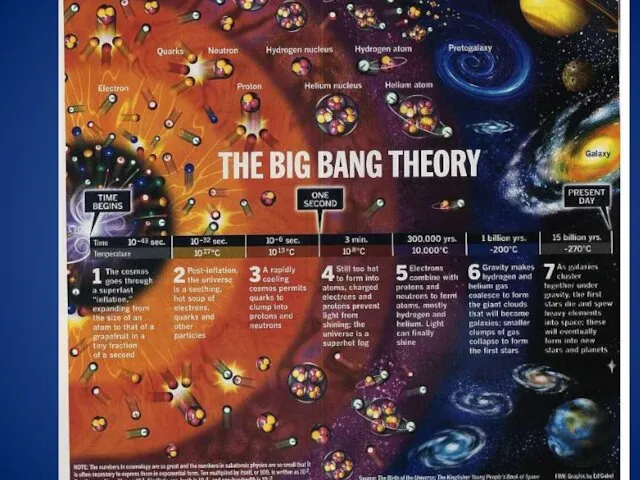 The Big Bang Theory
The Big Bang Theory Презентация по физике "Механическая работа. Работа силы, действующей по направлению движения тела.»" - скачать бесплатно
Презентация по физике "Механическая работа. Работа силы, действующей по направлению движения тела.»" - скачать бесплатно Презентация по физике "Возобновляемые источники энергии" - скачать бесплатно
Презентация по физике "Возобновляемые источники энергии" - скачать бесплатно Устройство и работа трансформатора
Устройство и работа трансформатора Геометрическая оптика
Геометрическая оптика  Презентация по физике Мощность
Презентация по физике Мощность  Электростатика. Связь напряженности и потенциала электрического поля
Электростатика. Связь напряженности и потенциала электрического поля Электромагнитные колебания. Лекция 7
Электромагнитные колебания. Лекция 7 Уравнение Бернулли. Подъемная сила крыла
Уравнение Бернулли. Подъемная сила крыла Лекция №7 РБ. Естественные источники радиации
Лекция №7 РБ. Естественные источники радиации Нестационарная теплопроводность цилиндра конечных размеров
Нестационарная теплопроводность цилиндра конечных размеров Механическое движение
Механическое движение Решение задач
Решение задач