- Коллекторный электродвигатель

Содержание
- 2. Коллекторный электродвигатель Мотор-редуктор: Передаточное число редуктора: 1:120 Скорость вращения выходного вала редуктора: 80 об/мин (при напряжении
- 3. Передаточное число редуктора
- 4. Motor Shield
- 5. Motor Shield Motor Shield — плата расширения для Arduino на базе чипа L298P, позволяющая управлять моторами
- 6. Motor Shield
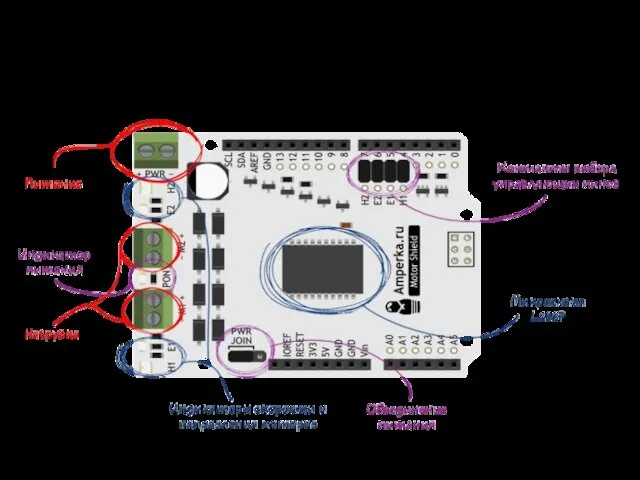
- 7. Распиновка Для коммуникации с микроконтроллером используются цифровые контакты Arduino: 4 — направление, M1 5 — скорость
- 8. Повышающий стабилизатор напряжения
- 9. Повышающий стабилизатор напряжения Входное напряжение: 2,7–14 В Выходное напряжение: 5–28 В Максимальный выходной ток: не более
- 10. Повышающий стабилизатор напряжения
- 11. Пример работы Motor Shield Определяем пины — пины необходимо определять только таким образом. E1 и H1
- 13. Скачать презентацию

Коллекторный электродвигатель
Мотор-редуктор:
Передаточное число редуктора: 1:120
Скорость вращения выходного вала редуктора: 80 об/мин
Коллекторный электродвигатель
Мотор-редуктор:
Передаточное число редуктора: 1:120
Скорость вращения выходного вала редуктора: 80 об/мин

Передаточное число редуктора
Передаточное число редуктора
Motor Shield
Motor Shield

Motor Shield
Motor Shield — плата расширения для Arduino на базе чипа
Motor Shield
Motor Shield — плата расширения для Arduino на базе чипа
Motor Shield
Motor Shield

Распиновка
Для коммуникации с микроконтроллером используются цифровые контакты Arduino:
4 — направление, M1
5
Распиновка
Для коммуникации с микроконтроллером используются цифровые контакты Arduino:
4 — направление, M1
5

Повышающий стабилизатор напряжения
Повышающий стабилизатор напряжения
Повышающий стабилизатор напряжения
Входное напряжение: 2,7–14 В
Выходное напряжение: 5–28 В
Максимальный выходной
Повышающий стабилизатор напряжения
Входное напряжение: 2,7–14 В
Выходное напряжение: 5–28 В
Максимальный выходной
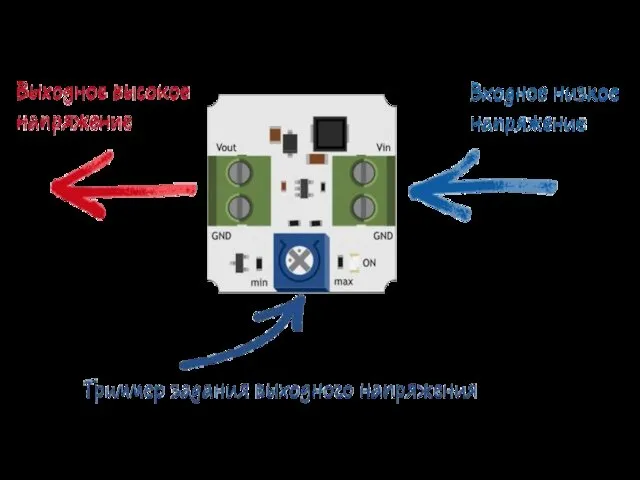
Повышающий стабилизатор напряжения
Повышающий стабилизатор напряжения
Пример работы Motor Shield
Определяем пины — пины необходимо определять только таким
Пример работы Motor Shield
Определяем пины — пины необходимо определять только таким
 Люминесцентная спектроскопия
Люминесцентная спектроскопия Ядерная физика
Ядерная физика Средства подъёма грузов и правила пользования им
Средства подъёма грузов и правила пользования им Расчет электростатических полей в вакууме
Расчет электростатических полей в вакууме Гидродинамическая теория детонации
Гидродинамическая теория детонации Полупроводниковые приборы
Полупроводниковые приборы Температура Презентацию подготовила Ученица 7А класса МОУ «СОШ №27 УИОП» г.Балаково Бояркина Анастасия Руководитель учитель фи
Температура Презентацию подготовила Ученица 7А класса МОУ «СОШ №27 УИОП» г.Балаково Бояркина Анастасия Руководитель учитель фи Введение в теорию ядерного магнитного резонанса
Введение в теорию ядерного магнитного резонанса Динаамика. Вращательное движение. Энергия. (Лекция 3)
Динаамика. Вращательное движение. Энергия. (Лекция 3) Презентация СИЛА ТЯЖЕСТИ Силы в механике
Презентация СИЛА ТЯЖЕСТИ Силы в механике Аттестационная работа. Курс «Физика вокруг нас»
Аттестационная работа. Курс «Физика вокруг нас» Оптические приборы
Оптические приборы Атомно-абсорбционная спектрометрия
Атомно-абсорбционная спектрометрия Пористость. Виды пористости
Пористость. Виды пористости Тепломассообмен. Вынужденная конвекция в трубах и каналах
Тепломассообмен. Вынужденная конвекция в трубах и каналах Что такое магнит
Что такое магнит Світло і кольори
Світло і кольори Методика обучения решению сложных и нестандартных задач по физике
Методика обучения решению сложных и нестандартных задач по физике Автомобильный генератор
Автомобильный генератор Оптичне волокно
Оптичне волокно Химия - әлемді тану құралы. (11 класс)
Химия - әлемді тану құралы. (11 класс) Физические основы действия ионизирующих излучений на организм
Физические основы действия ионизирующих излучений на организм Course of lectures «Contemporary Physics: Part1»
Course of lectures «Contemporary Physics: Part1» Электроемкость. Конденсаторы
Электроемкость. Конденсаторы Работа и мощность силы. Консервативные силы, работа консервативных сил. Потенциальная и кинетическая энергия
Работа и мощность силы. Консервативные силы, работа консервативных сил. Потенциальная и кинетическая энергия Защита высоковольтных линий от грозовых перенапряжений
Защита высоковольтных линий от грозовых перенапряжений Уравнение Менделеева - Клапейрона
Уравнение Менделеева - Клапейрона Обертальний рух тіла. Період та частота обертання
Обертальний рух тіла. Період та частота обертання