- Лекция 10. Расчет статически неопределимых систем методом перемещений

Содержание
- 2. Как уже знаем, при расчете статически неопределимых систем методом сил исключаются лишние связи, а за неизвестные
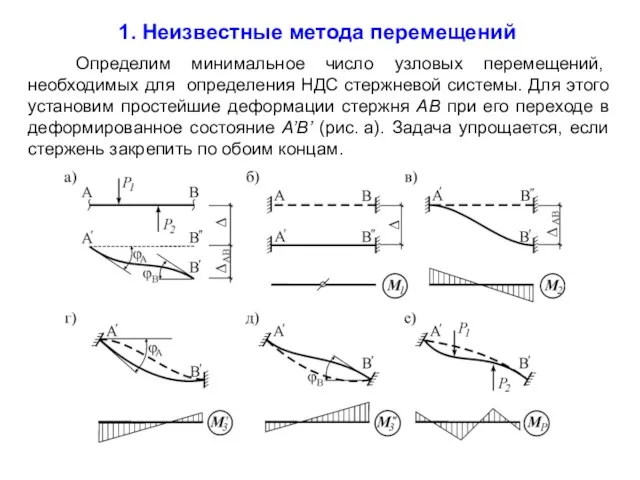
- 3. 1. Неизвестные метода перемещений Определим минимальное число узловых перемещений, необходимых для определения НДС стержневой системы. Для
- 4. Из рисунков видно, что для того чтобы деформации закрепленного по концам стержня были такими же как
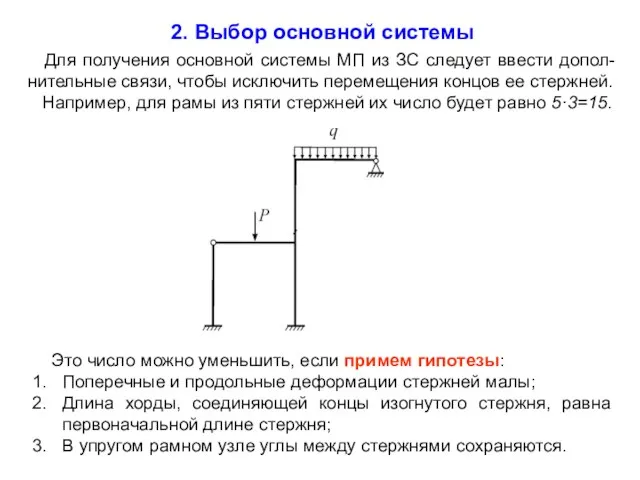
- 5. 2. Выбор основной системы Для получения основной системы МП из ЗС следует ввести допол-нительные связи, чтобы
- 6. Тогда в рассмотренной раме достаточно будет знать только три перемещения – поступательное перемещение Δ и угловые
- 7. Из 3-ей гипотезы (о том что углы между стержнями в упругом рамном узле сохраняются) следует, что
- 8. Общее число всех неизвестных определяется по формуле n = nугл + nлин . Оно называется степенью
- 9. Для получения ОС метода перемещений необходимо: – в упругие рамные узлы ЗС ввести nугл заделок; –
- 10. 3. Сущность метода перемещений Рассмотрим статически неопределимую раму. При ее расчете МС нужно исключать четыре лишние
- 11. В единичном состоянии введенной связи зададим единичное перемещение Z=1 и определим возникающую в ней реакцию r.
- 12. Если степень кинематической неопределимости стержневой системы равна n, ее ОС получается введением n дополнительных связей с
- 14. Скачать презентацию
Как уже знаем, при расчете статически неопределимых систем методом сил
Как уже знаем, при расчете статически неопределимых систем методом сил
1. Неизвестные метода перемещений
Определим минимальное число узловых перемещений, необходимых
1. Неизвестные метода перемещений
Определим минимальное число узловых перемещений, необходимых
Из рисунков видно, что для того чтобы деформации закрепленного по
Из рисунков видно, что для того чтобы деформации закрепленного по
2. Выбор основной системы
Для получения основной системы МП из ЗС
2. Выбор основной системы
Для получения основной системы МП из ЗС
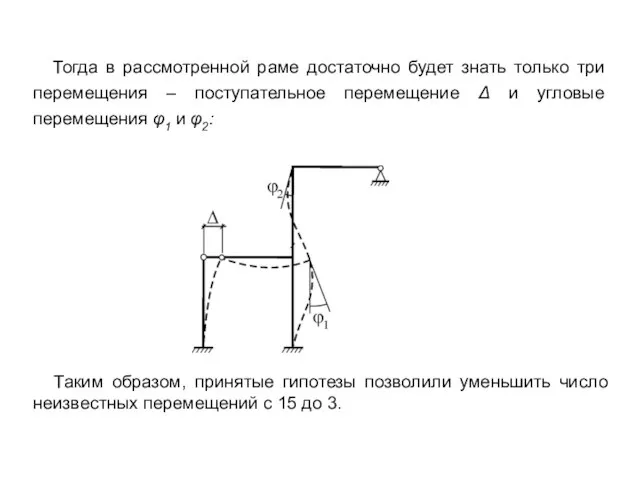
Тогда в рассмотренной раме достаточно будет знать только три перемещения
Тогда в рассмотренной раме достаточно будет знать только три перемещения
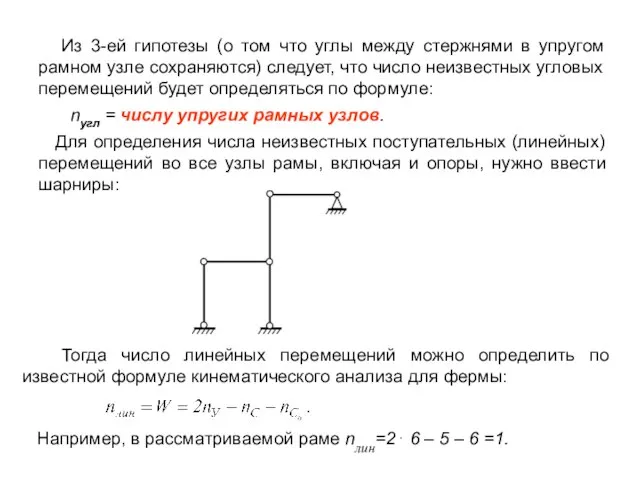
Из 3-ей гипотезы (о том что углы между стержнями в
Из 3-ей гипотезы (о том что углы между стержнями в
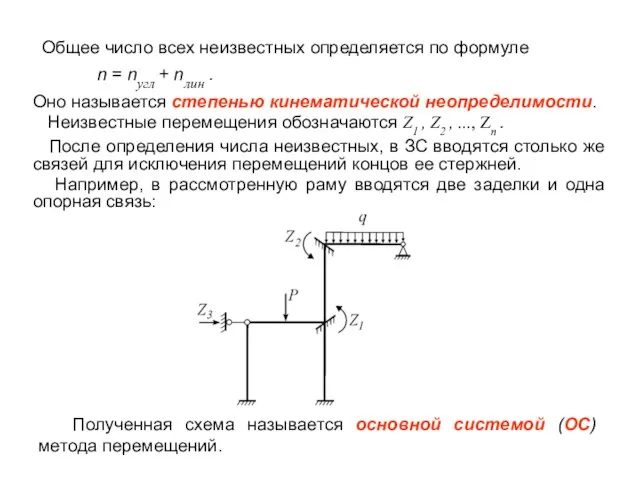
Общее число всех неизвестных определяется по формуле
n = nугл +
Общее число всех неизвестных определяется по формуле
n = nугл +
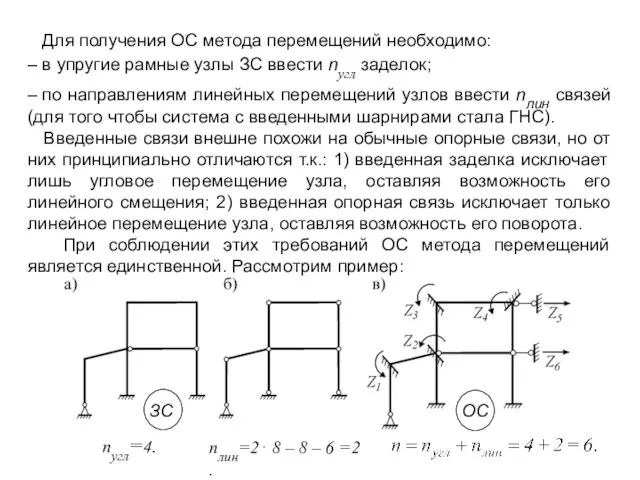
Для получения ОС метода перемещений необходимо:
– в упругие рамные узлы ЗС
Для получения ОС метода перемещений необходимо:
– в упругие рамные узлы ЗС
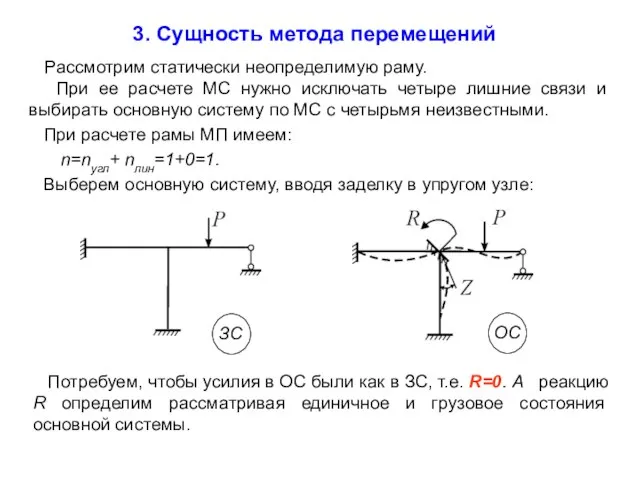
3. Сущность метода перемещений
Рассмотрим статически неопределимую раму.
При ее
3. Сущность метода перемещений
Рассмотрим статически неопределимую раму.
При ее
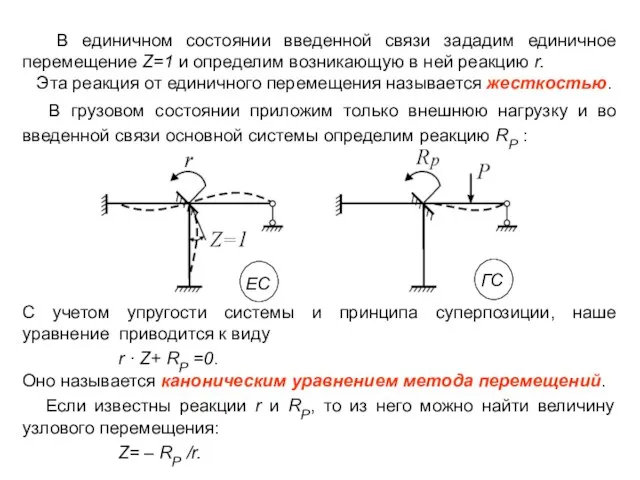
В единичном состоянии введенной связи зададим единичное перемещение Z=1 и
В единичном состоянии введенной связи зададим единичное перемещение Z=1 и
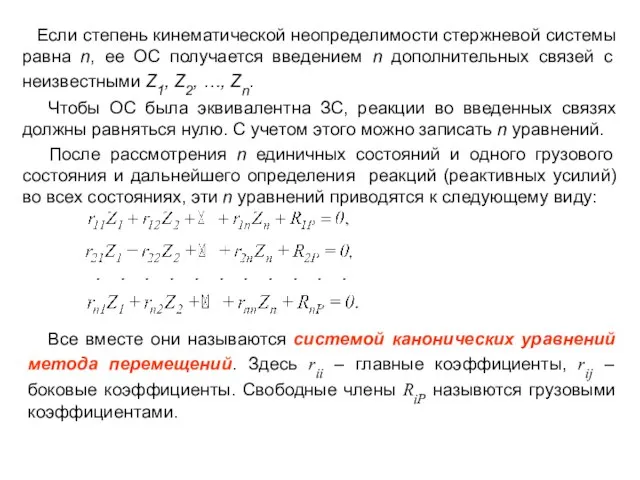
Если степень кинематической неопределимости стержневой системы равна n, ее ОС
Если степень кинематической неопределимости стержневой системы равна n, ее ОС
 ГИА тренировочные задания № 24 и 25 МОСКВА 2010 ЭКСМО Диагностика 2013
ГИА тренировочные задания № 24 и 25 МОСКВА 2010 ЭКСМО Диагностика 2013 Кинематические характеристики движения
Кинематические характеристики движения Презентация по физике "Строение атома" - скачать
Презентация по физике "Строение атома" - скачать  Магнетронды тозандандыру әдісі
Магнетронды тозандандыру әдісі Тормозные свойства автомобиля. (Лекция 8)
Тормозные свойства автомобиля. (Лекция 8) Презентация по физике "Электрический ток в электролитах" - скачать
Презентация по физике "Электрический ток в электролитах" - скачать  Механические колебания
Механические колебания Радиохимия. Альфа-бета, және гамма-сәулеленудің табиғаты және қасиеті
Радиохимия. Альфа-бета, және гамма-сәулеленудің табиғаты және қасиеті Магнитное поле. Магнитные свойства тканей организма. Понятие о биомагнетизме и магнитобиологии
Магнитное поле. Магнитные свойства тканей организма. Понятие о биомагнетизме и магнитобиологии Материалы электронной техники
Материалы электронной техники Исследование короткого замыкания как основной причины возникновения пожаров
Исследование короткого замыкания как основной причины возникновения пожаров Изменение импульса механической системы
Изменение импульса механической системы Аттестационная работа. Проект по физике в 7 классе Силы вокруг нас
Аттестационная работа. Проект по физике в 7 классе Силы вокруг нас Судоремонтные предприятия
Судоремонтные предприятия Нелинейно - оптические эффекты в волоконных световодах (лекция 8)
Нелинейно - оптические эффекты в волоконных световодах (лекция 8) Измерение параметров, характеризующих светопропускание (светопоглощение) оптических материалов
Измерение параметров, характеризующих светопропускание (светопоглощение) оптических материалов Понятие о машине и механизме
Понятие о машине и механизме Сила Архимеда. Плавание тел
Сила Архимеда. Плавание тел Закони Кеплера
Закони Кеплера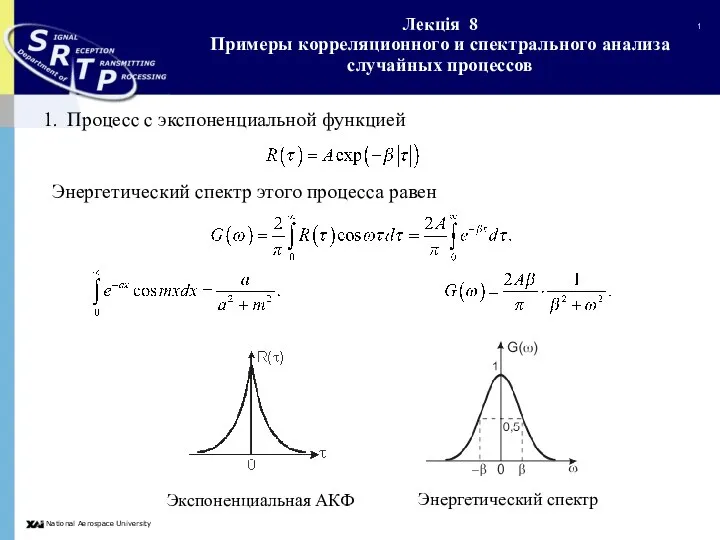 Примеры корреляционного и спектрального анализа случайных процессов. Лекція 8
Примеры корреляционного и спектрального анализа случайных процессов. Лекція 8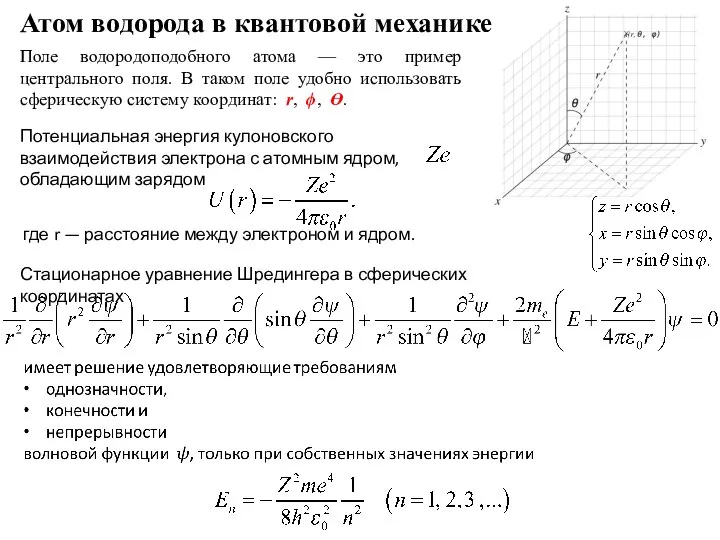 Атом водорода в квантовой механике
Атом водорода в квантовой механике Элементы физической кинетики
Элементы физической кинетики Презентация по теме: «Применение радиоактивных изотопов в медицине»
Презентация по теме: «Применение радиоактивных изотопов в медицине» Законы фотоэффекта
Законы фотоэффекта Арматура и ее свойства. Робот для вязки арматуры (9 класс)
Арматура и ее свойства. Робот для вязки арматуры (9 класс) Химические источники тока
Химические источники тока Вплив магнітного поля на живі організми.
Вплив магнітного поля на живі організми.  Prostý tah (tlak)
Prostý tah (tlak)