Математические модели и методы оптимизации процессов пространственного маневрирования морских подвижных объектов
- Математические модели и методы оптимизации процессов пространственного маневрирования морских подвижных объектов

Содержание
- 2. Актуальность исследования Проблема математического моделирования для автоматизации процессов управления морскими подвижными объектами разрабатывается в течение многих
- 3. Научные и практические задачи Разработка математических моделей объекта и моделей оптимальной координации процессов пространственного маневрирования ПА
- 4. 3. Разработка комплекса численных методов НП для решения задач координации с учетом невыпуклых функционалов и областей
- 5. Научные положения, выносимые на защиту Математические модели ПА и методы оптимальной координации подсистем управления – СУ
- 6. Математические модели пространственного движения ПА. Системы координат
- 7. Уравнения перемещения центра масс ПА в земной системе координат Общие выражения для сил и моментов
- 8. Функциональная структура системы автоматического управления движением ПА
- 9. Многоконтурная типовая структура системы управления глубиной ПА
- 10. Постановка задачи оптимизации управления ПА на циркуляции Упрощенная модель движения на установившейся циркуляции: Система ограничений: ограничения
- 12. Задача нелинейного программирования При этом относительно характера допустимой области решений, описываемой системой неравенств, ничего не известно,
- 13. , Продолжая так далее, получим одно равносильное неравенство, задающее допустимую область решений Приравнивая нулю, получаем уравнение
- 14. Решение задачи оптимизации параметров движения ПА на циркуляции Модифицированная функция Лагранжа: , где и равносильное системе
- 15. Сходимость к решению из различных начальных условий
- 16. Отыскание оптимального решения на границе невыпуклой допустимой области («чистая» задача Лагранжа) Исходные неравенства равносильны одному неравенству
- 17. Градиентная система уравнений отыскания оптимального решения на границе допустимой области Функция Лагранжа Производная функции Лагранжа по
- 18. Отыскание экстремума на границе допустимой области с использованием принципов функционального регулирования Уравнения движения по границе где
- 19. Способы задания границы в явной форме (см. файл “delta_V.mrj”) Использование оператора выделения минимального сигнала из двух
- 20. Результаты «сглаживания» операторов Значения варьируем от 0,1 до 0,0001
- 21. Отыскание экстремума на границе допустимой области с использованием принципов функционального регулирования Уравнения движения по границе где
- 22. Основные характеристики оптимального маневра Зависимости параметров движения от скорости хода
- 23. ОСНОВНОЙ РЕЗУЛЬТАТ выявлены оптимальные по критериям быстродействия и минимизации радиуса циркуляции значений перекладки вертикального руля и
- 24. ПРИНЦИП КООРДИНИРОВАННОГО УПРАВЛЕНИЯ СУ И РУ Принцип управления экстренным маневром корабля по курсу как объектом с
- 25. ФУНКЦИОНАЛЬНАЯ СТРУКТУРА КООРДИНИРУЮЩЕЙ СИСТЕМЫ УПРАВЛЕНИЯ
- 26. Алгоритмы координированного управления СУ и РУ Модель регулятора скорости хода где - вырабатываемый локальной системой регулирования
- 27. РАЗРАБОТКА В СРЕДЕ ПК «МВТУ» моделирующего комплекса для подтверждения эффективности предложенных принципов координированного управления Задачи разработки:
- 28. Типовые нелинейные звенья САР с однозначной характеристикой
- 29. . Нелинейное звено типа «ограничение выходного сигнала с зоной нечувствительности»
- 30. Двухполостной сервомотор с золотниковым усилителем
- 31. Традиционное предикатное описание СМ
- 32. Математическая модель гидравлического сервопривода регулирующего клапана турбины где ϕн , ϕв и v вычисляются по формулам:
- 33. Модель рулевой машины - нелинейное динамическое звено типа «упор» Уравнения
- 34. Уточненные математические модели нелинейного звена типа «люфт»
- 35. Моделирование звена «люфт» Переходные процессы Фазовая плоскость
- 36. Гистерезисные звенья Однопетлевой Двухпетлевой
- 37. Моделирование гистерезисных звеньев
- 38. «Новый блок»
- 40. ВАРИАНТ ВИРТУАЛЬНОГО ПУЛЬТА УПРАВЛЕНИЯ
- 41. Внешний вид пульта управления и индикации
- 42. Внешний вид дополнительных панелей анимации
- 43. Внешний вид дополнительных панелей анимации
- 44. Результаты вычислительных экспериментов на полной математической модели ПА Эксперимент 1
- 45. Результаты вычислительных экспериментов на полной математической модели ПА Эксперимент 2
- 46. Сравнение результатов 1 и 2 экспериментов Траектории движения центра масс Время перехода на заданный курс 180
- 47. Результаты вычислительных экспериментов на полной математической модели ПА Эксперимент 3
- 48. Результаты вычислительных экспериментов на полной математической модели ПА Эксперимент 4
- 49. Сравнение результатов 3 и 4 экспериментов Траектории движения центра масс Время перехода на заданный курс 180
- 50. При выполнении вычислительных экспериментов решены следующие задачи: 1. Систематизированы основные положения математического моделирования динамики комплекса «Подводный
- 51. Основными научными результатами, полученными в диссертации, являются: 1. Сформулирована и исследована задача комплексного управления процессами пространственного
- 53. Скачать презентацию
Актуальность исследования
Проблема математического моделирования для автоматизации процессов управления морскими подвижными
Актуальность исследования
Проблема математического моделирования для автоматизации процессов управления морскими подвижными
Научные и практические задачи
Разработка математических моделей объекта и моделей оптимальной координации
Научные и практические задачи
Разработка математических моделей объекта и моделей оптимальной координации
3. Разработка комплекса численных методов НП для решения задач координации с
3. Разработка комплекса численных методов НП для решения задач координации с
Научные положения, выносимые на защиту
Математические модели ПА и методы оптимальной координации
Научные положения, выносимые на защиту
Математические модели ПА и методы оптимальной координации
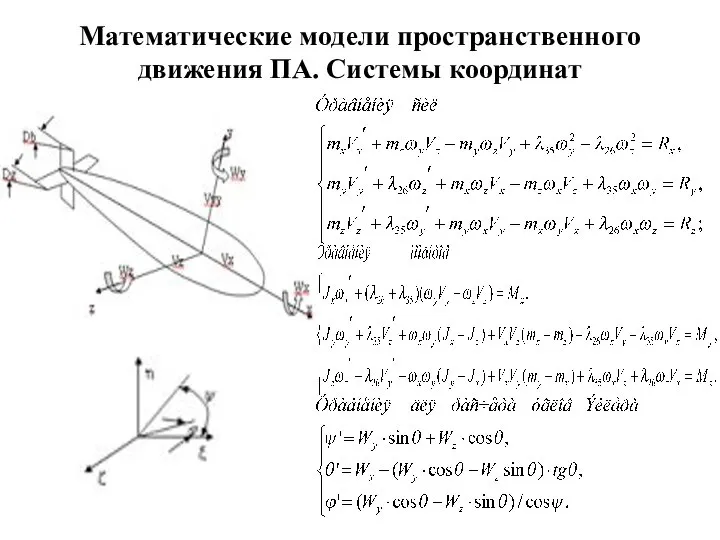
Математические модели пространственного движения ПА. Системы координат
Математические модели пространственного движения ПА. Системы координат
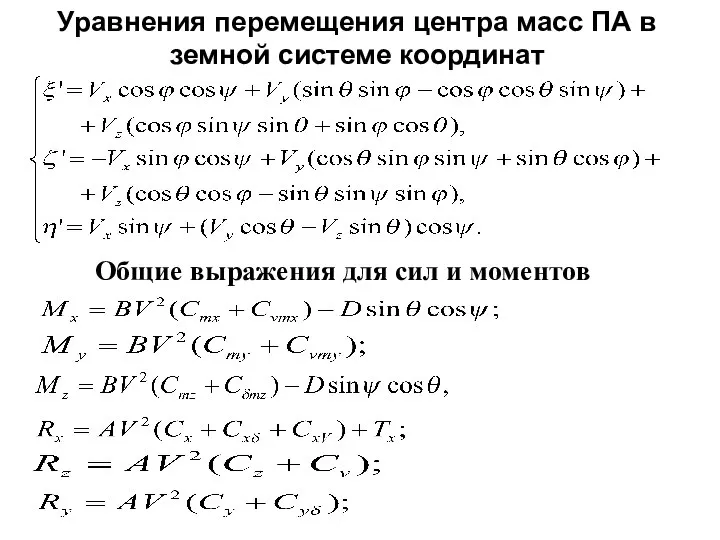
Уравнения перемещения центра масс ПА в земной системе координат
Общие выражения для
Уравнения перемещения центра масс ПА в земной системе координат
Общие выражения для

Функциональная структура системы автоматического управления движением ПА
Функциональная структура системы автоматического управления движением ПА

Многоконтурная типовая структура системы
управления глубиной ПА
Многоконтурная типовая структура системы
управления глубиной ПА
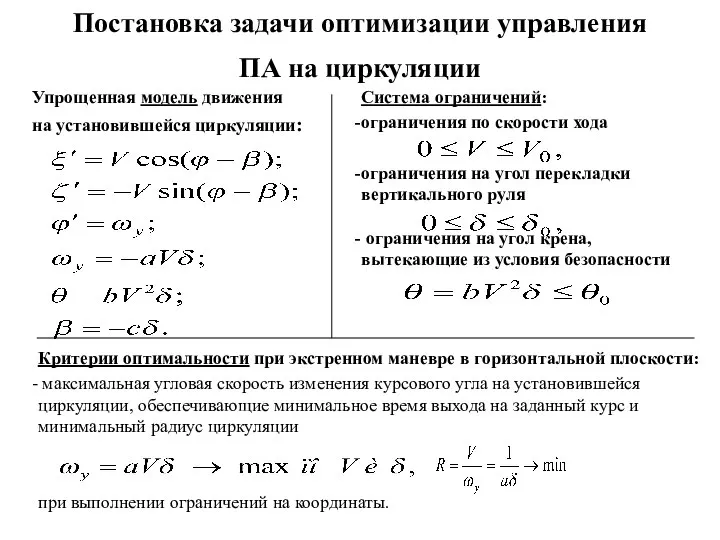
Постановка задачи оптимизации управления ПА на циркуляции
Упрощенная модель движения
на установившейся
Постановка задачи оптимизации управления ПА на циркуляции
Упрощенная модель движения
на установившейся
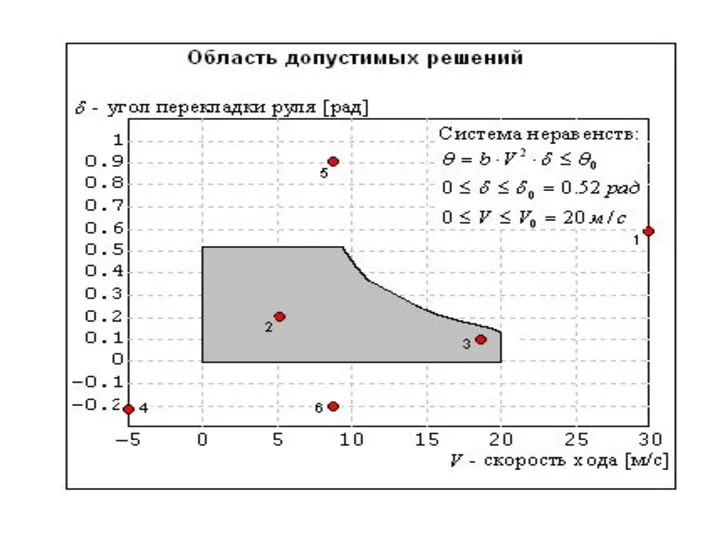
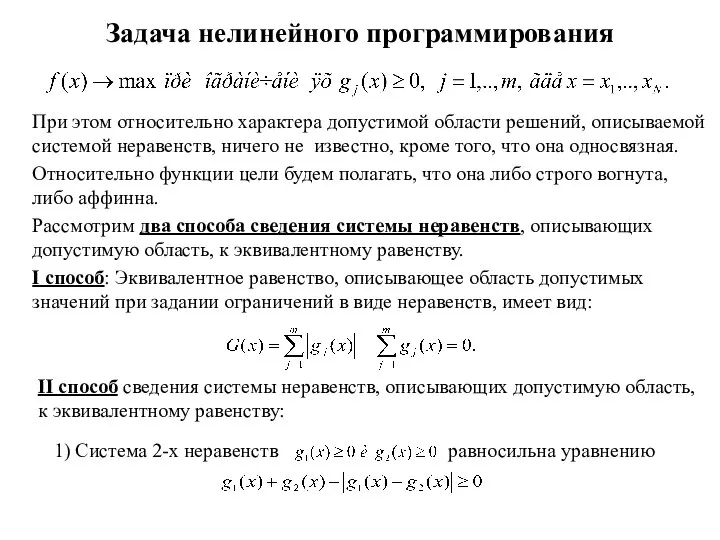
Задача нелинейного программирования
При этом относительно характера допустимой области решений, описываемой системой
Задача нелинейного программирования
При этом относительно характера допустимой области решений, описываемой системой
,
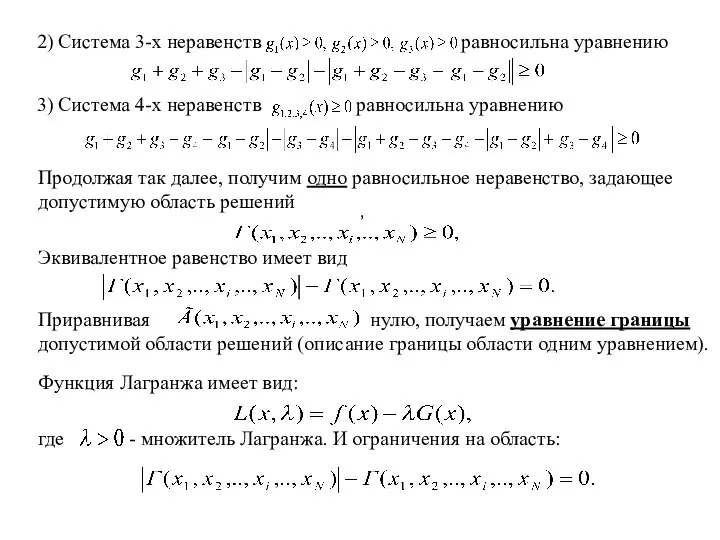
Продолжая так далее, получим одно равносильное неравенство, задающее
допустимую область решений
Приравнивая нулю,
,
Продолжая так далее, получим одно равносильное неравенство, задающее
допустимую область решений
Приравнивая нулю,
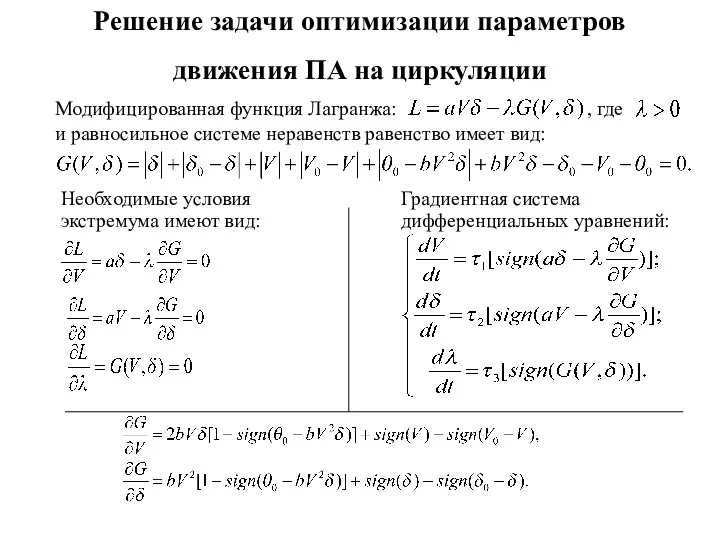
Решение задачи оптимизации параметров движения ПА на циркуляции
Модифицированная функция Лагранжа:
Решение задачи оптимизации параметров движения ПА на циркуляции
Модифицированная функция Лагранжа:
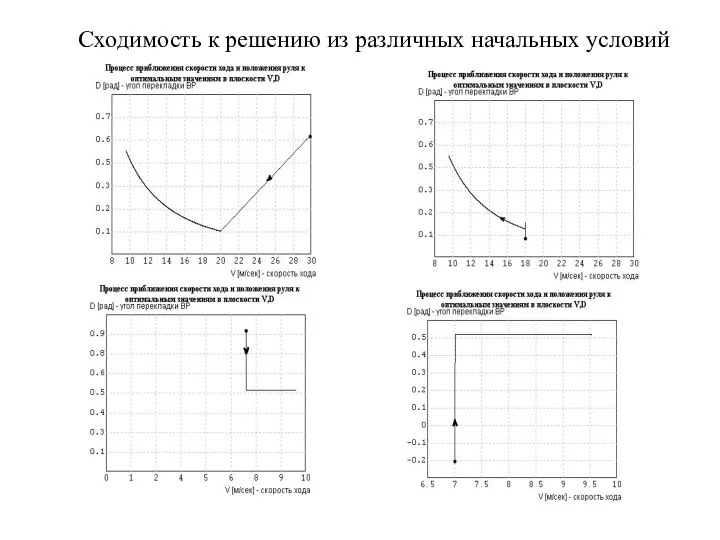
Сходимость к решению из различных начальных условий
Сходимость к решению из различных начальных условий
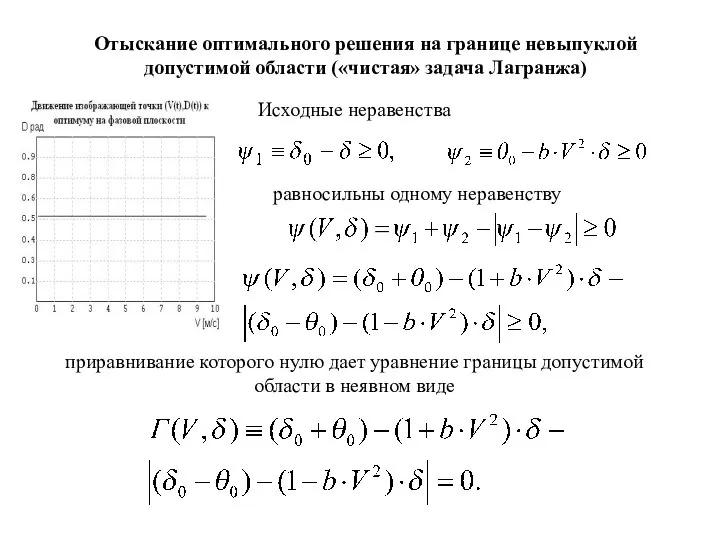
Отыскание оптимального решения на границе невыпуклой допустимой области («чистая» задача Лагранжа)
Исходные
Отыскание оптимального решения на границе невыпуклой допустимой области («чистая» задача Лагранжа)
Исходные
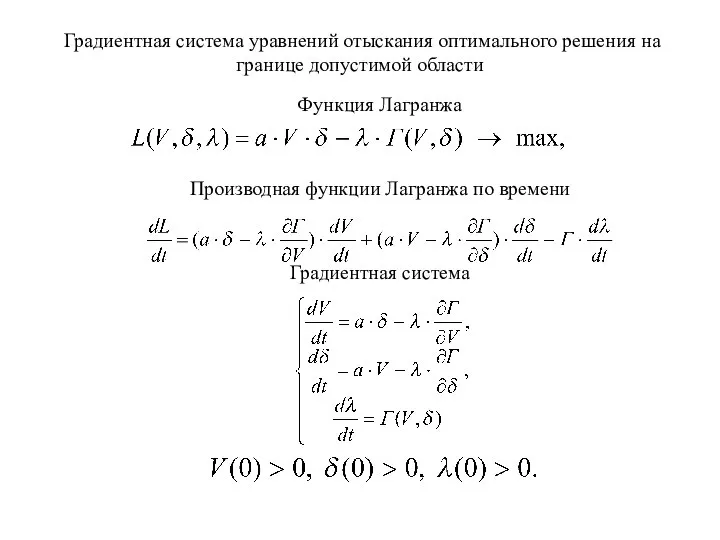
Градиентная система уравнений отыскания оптимального решения на границе допустимой области
Функция Лагранжа
Производная
Градиентная система уравнений отыскания оптимального решения на границе допустимой области
Функция Лагранжа
Производная
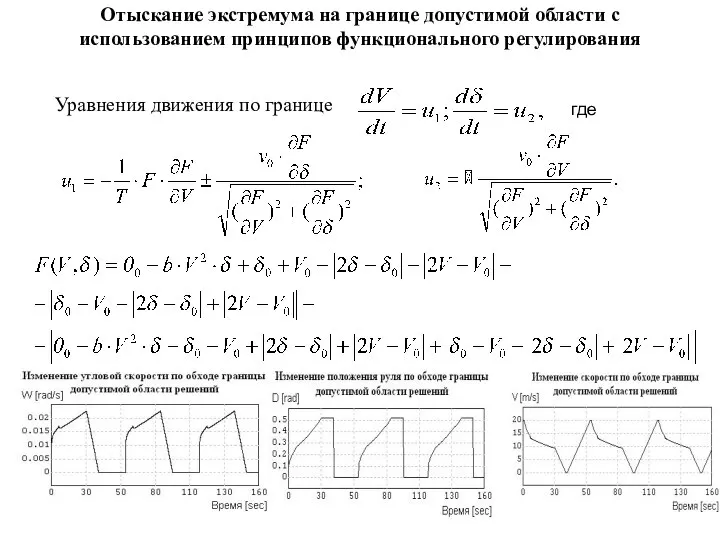
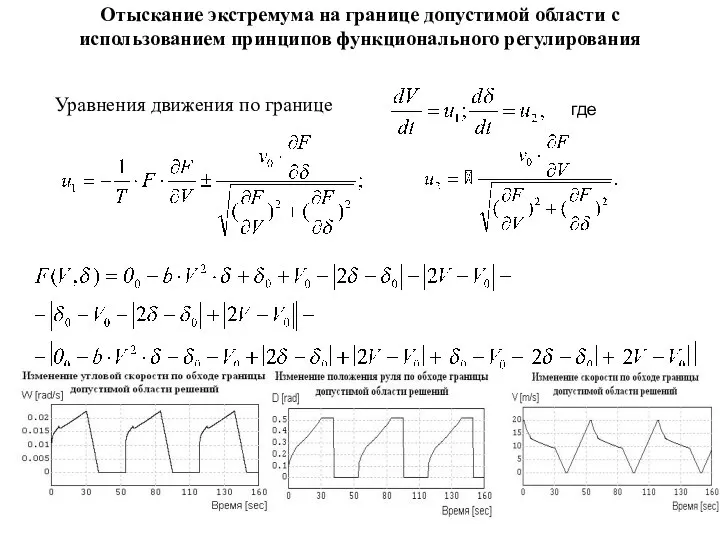
Отыскание экстремума на границе допустимой области с использованием принципов функционального регулирования
Отыскание экстремума на границе допустимой области с использованием принципов функционального регулирования
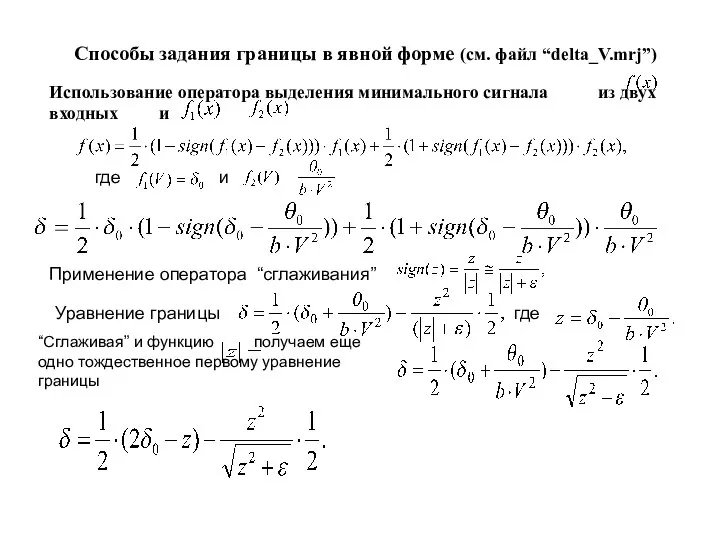
Способы задания границы в явной форме (см. файл “delta_V.mrj”)
Использование оператора выделения
Способы задания границы в явной форме (см. файл “delta_V.mrj”)
Использование оператора выделения
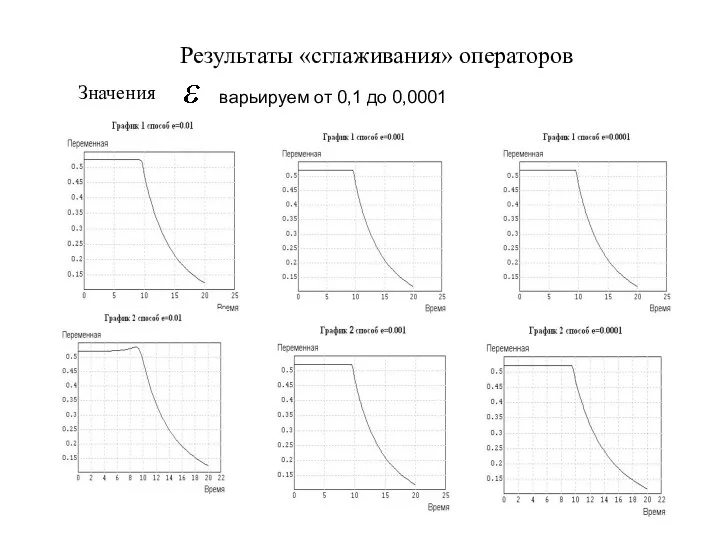
Результаты «сглаживания» операторов
Значения
варьируем от 0,1 до 0,0001
Результаты «сглаживания» операторов
Значения
варьируем от 0,1 до 0,0001
Отыскание экстремума на границе допустимой области с использованием принципов функционального регулирования
Отыскание экстремума на границе допустимой области с использованием принципов функционального регулирования
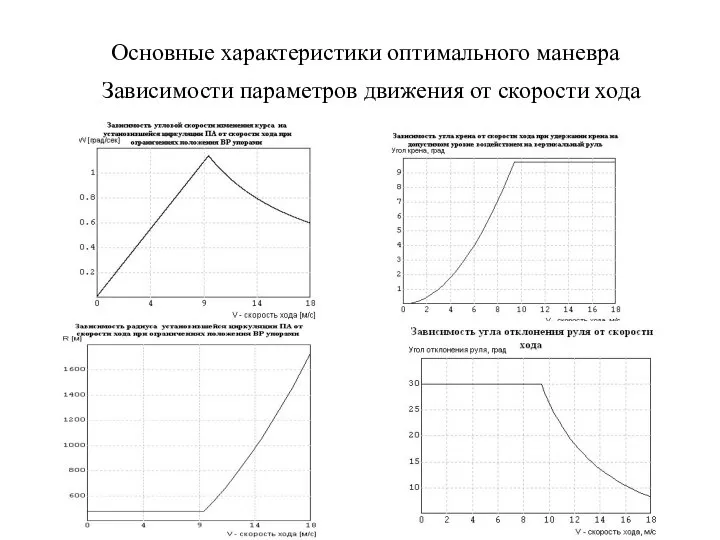
Основные характеристики оптимального маневра
Зависимости параметров движения от скорости хода
Основные характеристики оптимального маневра
Зависимости параметров движения от скорости хода
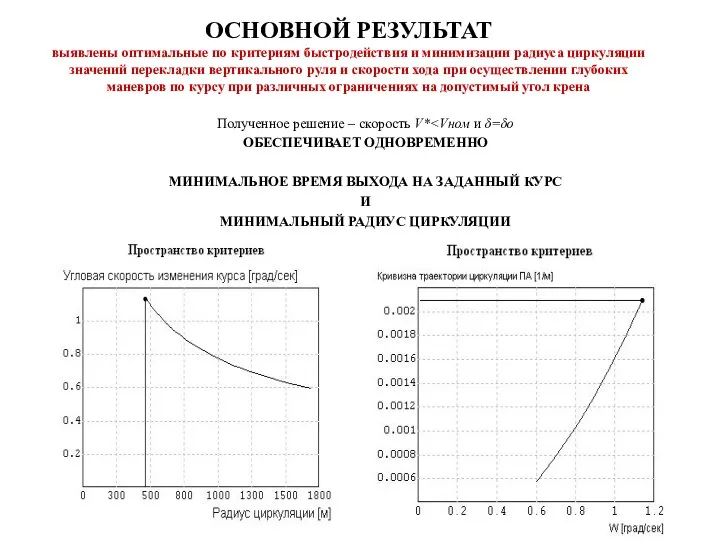
ОСНОВНОЙ РЕЗУЛЬТАТ
выявлены оптимальные по критериям быстродействия и минимизации радиуса циркуляции значений
ОСНОВНОЙ РЕЗУЛЬТАТ выявлены оптимальные по критериям быстродействия и минимизации радиуса циркуляции значений
ПРИНЦИП КООРДИНИРОВАННОГО УПРАВЛЕНИЯ СУ И РУ
Принцип управления экстренным маневром корабля по
ПРИНЦИП КООРДИНИРОВАННОГО УПРАВЛЕНИЯ СУ И РУ
Принцип управления экстренным маневром корабля по

ФУНКЦИОНАЛЬНАЯ СТРУКТУРА
КООРДИНИРУЮЩЕЙ СИСТЕМЫ УПРАВЛЕНИЯ
ФУНКЦИОНАЛЬНАЯ СТРУКТУРА
КООРДИНИРУЮЩЕЙ СИСТЕМЫ УПРАВЛЕНИЯ
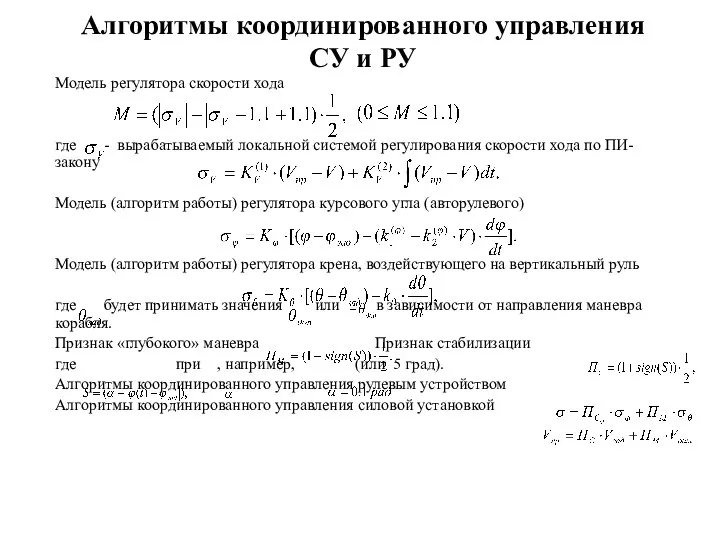
Алгоритмы координированного управления СУ и РУ
Модель регулятора скорости хода
где -
Алгоритмы координированного управления СУ и РУ
Модель регулятора скорости хода
где -
РАЗРАБОТКА В СРЕДЕ ПК «МВТУ»
моделирующего комплекса для подтверждения эффективности предложенных
РАЗРАБОТКА В СРЕДЕ ПК «МВТУ»
моделирующего комплекса для подтверждения эффективности предложенных
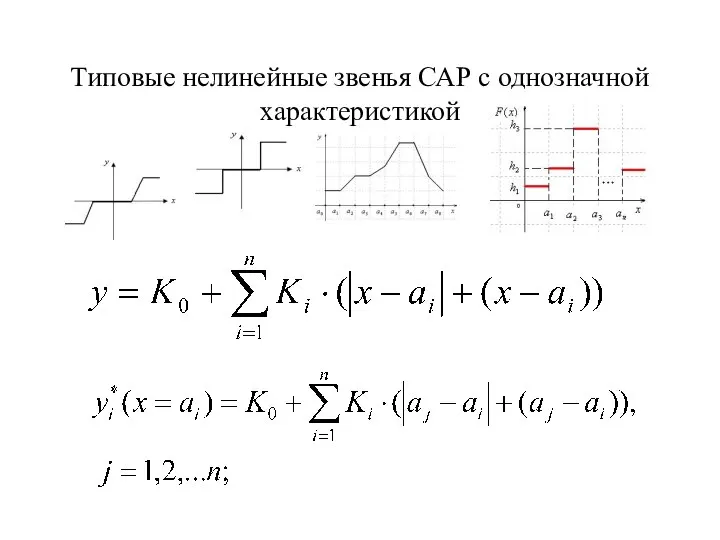
Типовые нелинейные звенья САР с однозначной характеристикой
Типовые нелинейные звенья САР с однозначной характеристикой
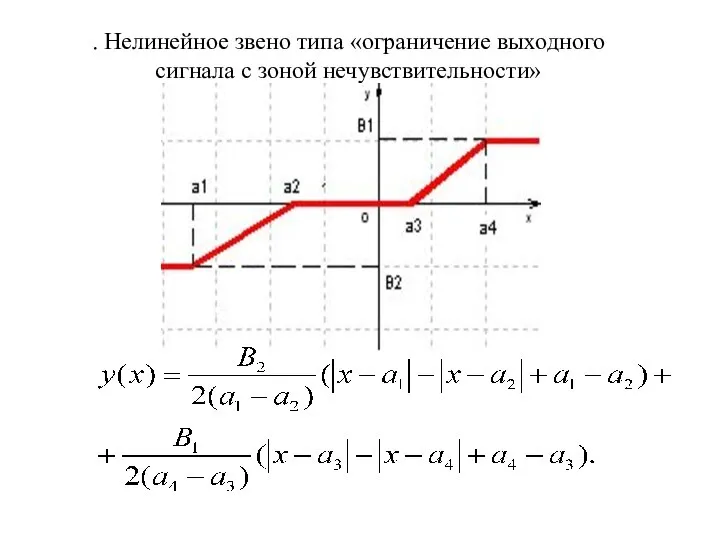
. Нелинейное звено типа «ограничение выходного сигнала с зоной нечувствительности»
. Нелинейное звено типа «ограничение выходного сигнала с зоной нечувствительности»
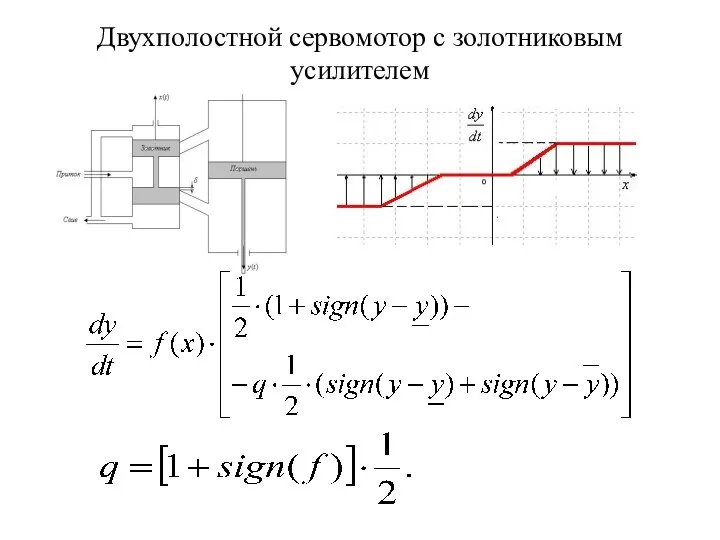
Двухполостной сервомотор с золотниковым усилителем
Двухполостной сервомотор с золотниковым усилителем
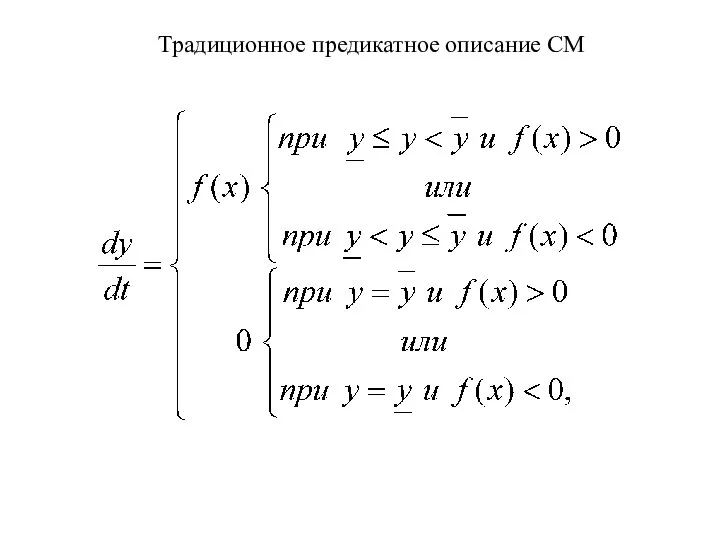
Традиционное предикатное описание СМ
Традиционное предикатное описание СМ
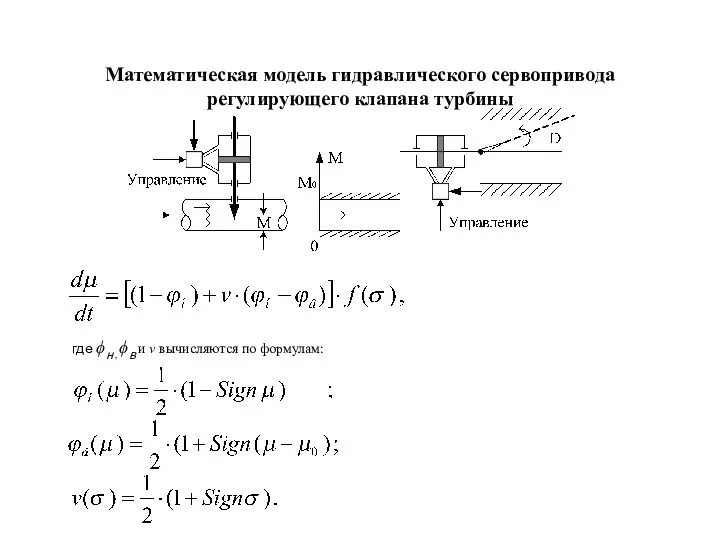
Математическая модель гидравлического сервопривода регулирующего клапана турбины
где ϕн , ϕв и
Математическая модель гидравлического сервопривода регулирующего клапана турбины
где ϕн , ϕв и
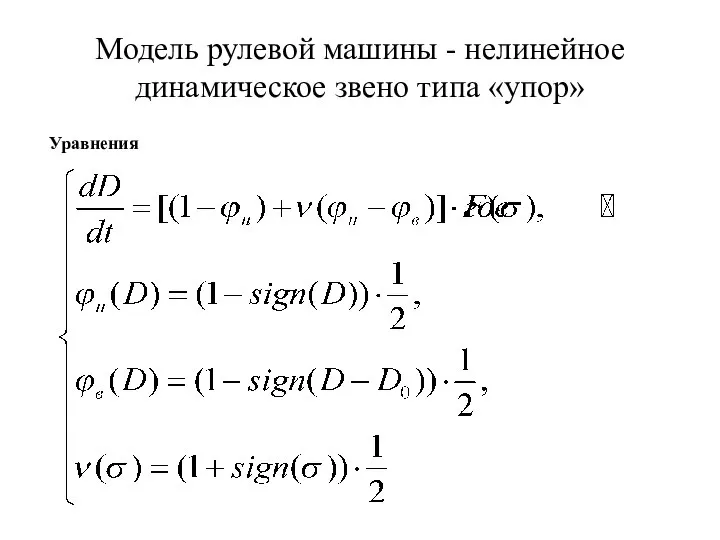
Модель рулевой машины - нелинейное динамическое звено типа «упор»
Уравнения
Модель рулевой машины - нелинейное динамическое звено типа «упор»
Уравнения
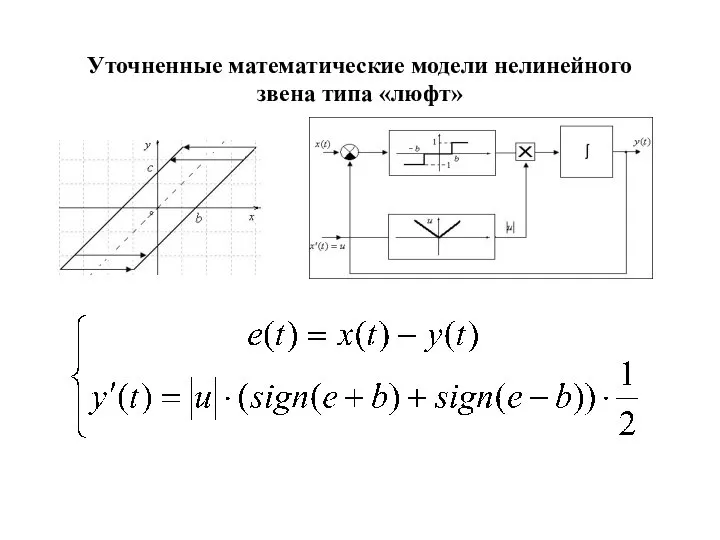
Уточненные математические модели нелинейного звена типа «люфт»
Уточненные математические модели нелинейного звена типа «люфт»
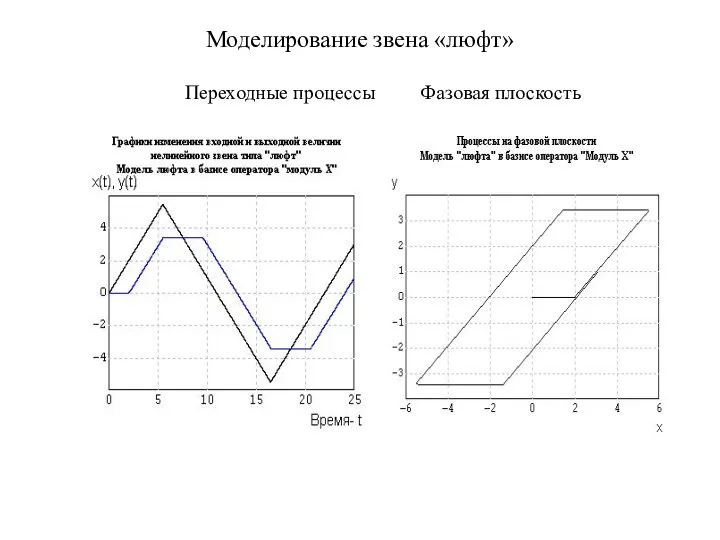
Моделирование звена «люфт»
Переходные процессы Фазовая плоскость
Моделирование звена «люфт»
Переходные процессы Фазовая плоскость
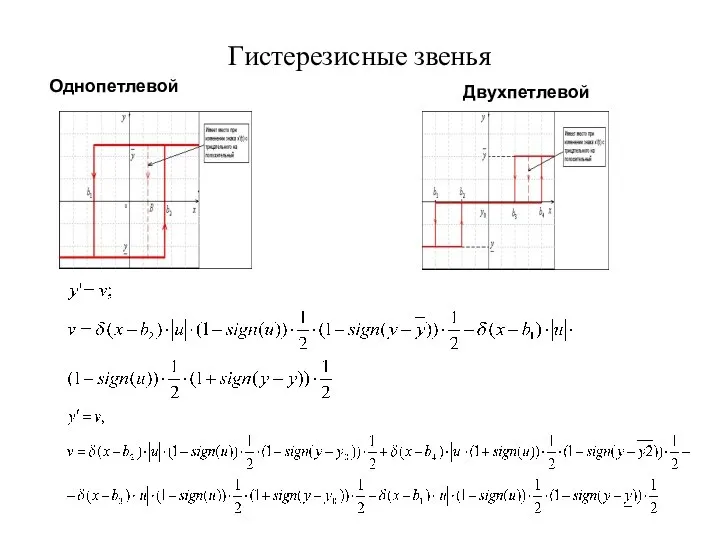
Гистерезисные звенья
Однопетлевой
Двухпетлевой
Гистерезисные звенья
Однопетлевой
Двухпетлевой
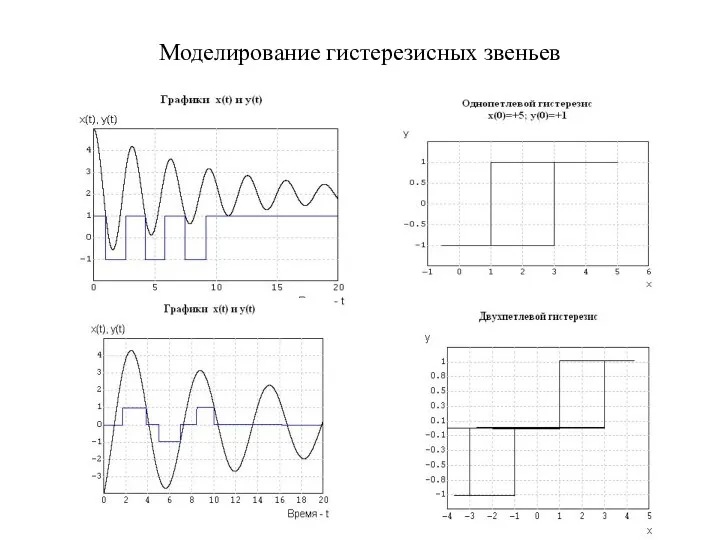
Моделирование гистерезисных звеньев
Моделирование гистерезисных звеньев
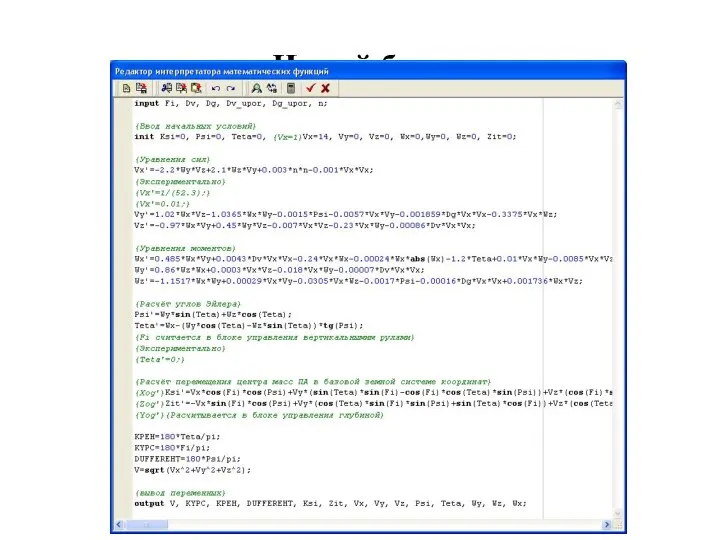
«Новый блок»
«Новый блок»

ВАРИАНТ ВИРТУАЛЬНОГО ПУЛЬТА УПРАВЛЕНИЯ
ВАРИАНТ ВИРТУАЛЬНОГО ПУЛЬТА УПРАВЛЕНИЯ
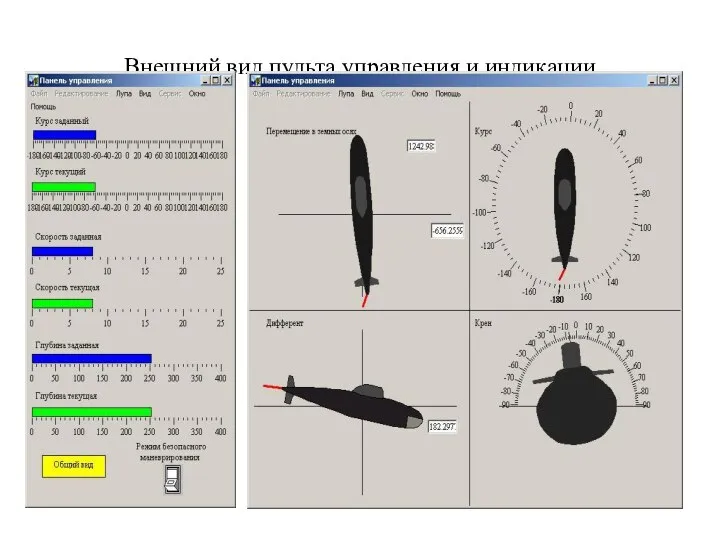
Внешний вид пульта управления и индикации
Внешний вид пульта управления и индикации
Внешний вид дополнительных панелей анимации
Внешний вид дополнительных панелей анимации
Внешний вид дополнительных панелей анимации
Внешний вид дополнительных панелей анимации
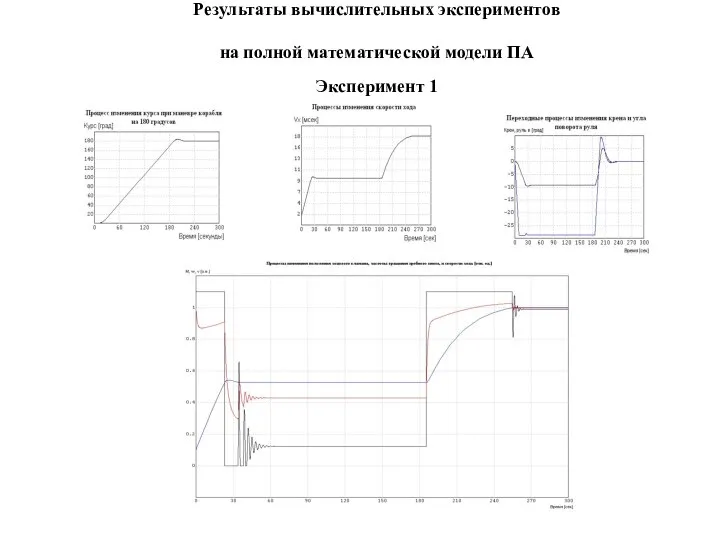
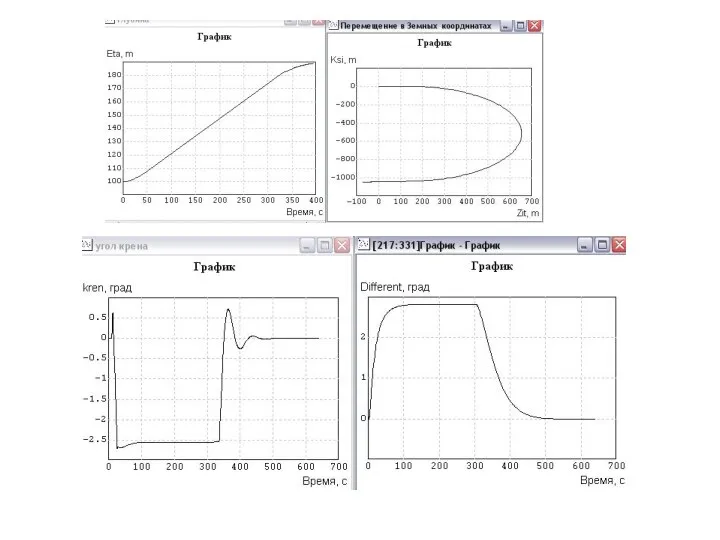
Результаты вычислительных экспериментов
на полной математической модели ПА
Эксперимент 1
Результаты вычислительных экспериментов
на полной математической модели ПА
Эксперимент 1
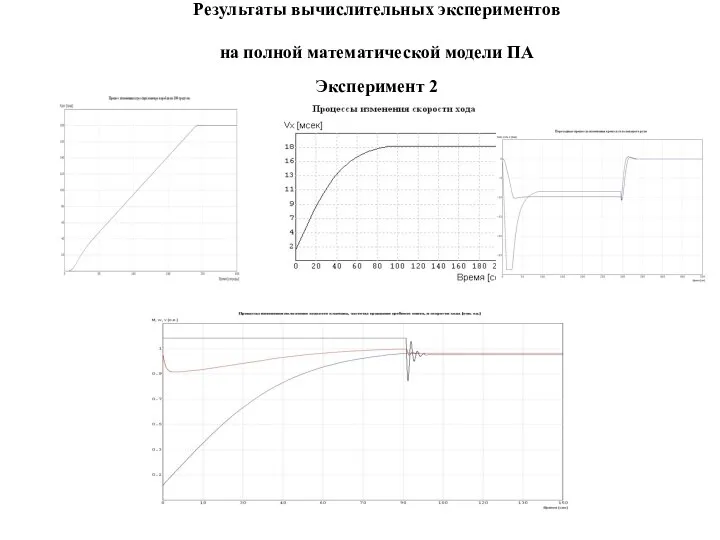
Результаты вычислительных экспериментов
на полной математической модели ПА
Эксперимент 2
Результаты вычислительных экспериментов
на полной математической модели ПА
Эксперимент 2
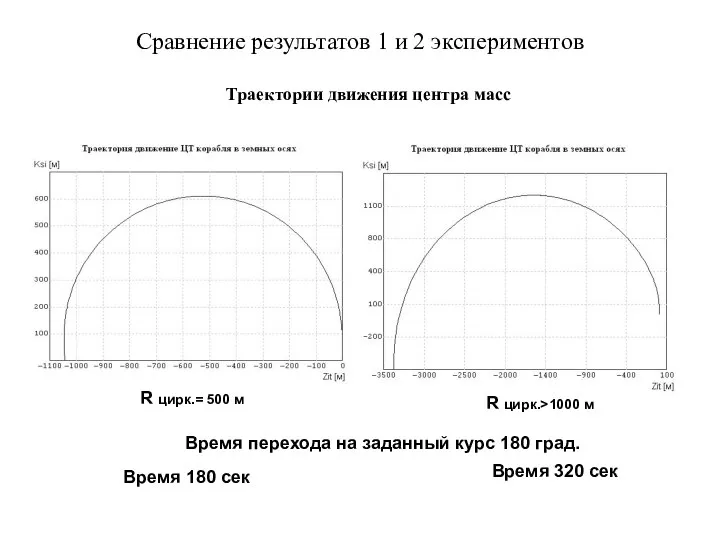
Сравнение результатов 1 и 2 экспериментов
Траектории движения центра масс
Время
Сравнение результатов 1 и 2 экспериментов
Траектории движения центра масс
Время
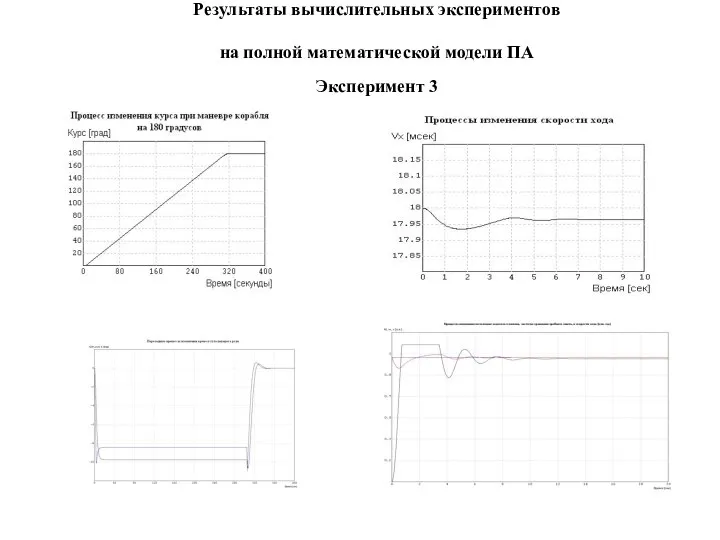
Результаты вычислительных экспериментов
на полной математической модели ПА
Эксперимент 3
Результаты вычислительных экспериментов
на полной математической модели ПА
Эксперимент 3
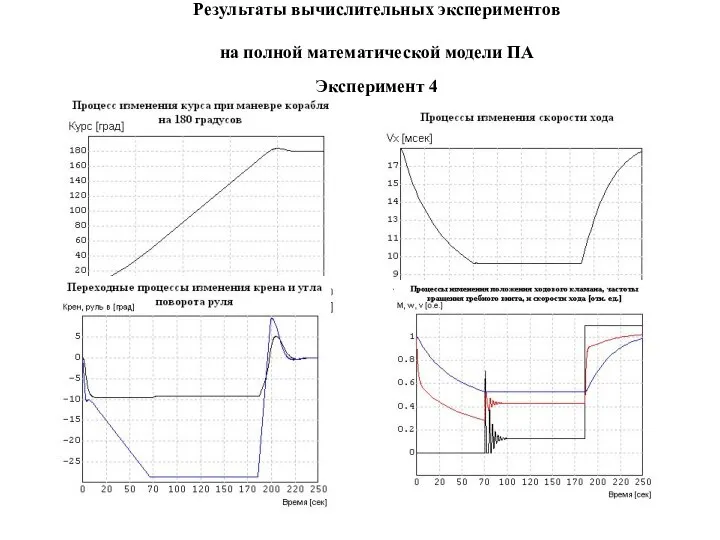
Результаты вычислительных экспериментов
на полной математической модели ПА
Эксперимент 4
Результаты вычислительных экспериментов
на полной математической модели ПА
Эксперимент 4
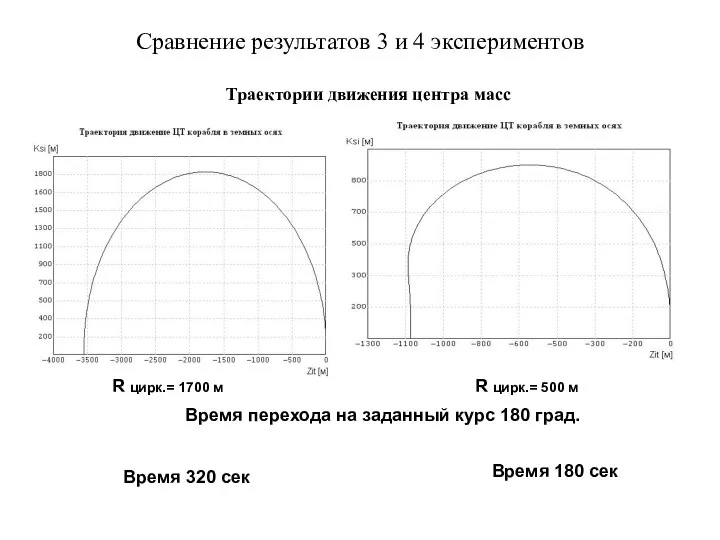
Сравнение результатов 3 и 4 экспериментов
Траектории движения центра масс
Время
Сравнение результатов 3 и 4 экспериментов
Траектории движения центра масс
Время
При выполнении вычислительных экспериментов решены следующие задачи:
1. Систематизированы основные положения математического
При выполнении вычислительных экспериментов решены следующие задачи:
1. Систематизированы основные положения математического
Основными научными результатами, полученными в диссертации, являются:
1. Сформулирована и исследована
Основными научными результатами, полученными в диссертации, являются:
1. Сформулирована и исследована
 Казанский университет. Институт физики
Казанский университет. Институт физики Деформация - изменение формы или размеров тел под действием внешних сил
Деформация - изменение формы или размеров тел под действием внешних сил Енергія електричного поля
Енергія електричного поля Полупроводниковые приборы
Полупроводниковые приборы Понятие термодинамики
Понятие термодинамики Проводники в электростатическом поле
Проводники в электростатическом поле Тема: Простые механизмы. Работа ученика 7 «в» СОШ №7 г.Якутска Филиппова Юры Руководитель проекта А.П.Филиппова
Тема: Простые механизмы. Работа ученика 7 «в» СОШ №7 г.Якутска Филиппова Юры Руководитель проекта А.П.Филиппова Теплота парообразования. Сжижение газов. Влажность воздуха
Теплота парообразования. Сжижение газов. Влажность воздуха Свойства альфа-частиц. АФ1.8
Свойства альфа-частиц. АФ1.8 Нейтрон и его свойства
Нейтрон и его свойства מתקני הרמה ושינוע הרצאה :מתקני הרמה. כבלים ,חבלים ,שרשרות
מתקני הרמה ושינוע הרצאה :מתקני הרמה. כבלים ,חבלים ,שרשרות Команда «По» представляет: Закон сохранения импульса. Реактивное движение
Команда «По» представляет: Закон сохранения импульса. Реактивное движение Электростатика. Электрический заряд
Электростатика. Электрический заряд Электрическое поле. Законы постоянного тока
Электрическое поле. Законы постоянного тока Проект по физике на тему: «Экология, энергетика, человек»
Проект по физике на тему: «Экология, энергетика, человек» Модель атома Резерфорда Ядерная или Планетарная модель атома Вонс Диана и Тарамова Айза 10«Б»
Модель атома Резерфорда Ядерная или Планетарная модель атома Вонс Диана и Тарамова Айза 10«Б»  Лазер. История создания лазера. Устройство лазера. Применение лазера
Лазер. История создания лазера. Устройство лазера. Применение лазера Система и окружающая среда
Система и окружающая среда Контактные явления
Контактные явления Неньютоновские жидкости
Неньютоновские жидкости Дипломный проект. Ремонт, мотаж и эксплуатация домкратов
Дипломный проект. Ремонт, мотаж и эксплуатация домкратов Вычисления массы и массовой доли растворенного вещества (11 класс)
Вычисления массы и массовой доли растворенного вещества (11 класс) Презентация по физике "Радиация и её влияние на окружающую среду" - скачать
Презентация по физике "Радиация и её влияние на окружающую среду" - скачать  Теплообмен излучением между телами, разделённой прозрачной средой. Коэффициент облучённости. Теплообмен между телами
Теплообмен излучением между телами, разделённой прозрачной средой. Коэффициент облучённости. Теплообмен между телами Количественный анализ. Хроматографические методы
Количественный анализ. Хроматографические методы Тепловые процессы. Теплообменники. Нагрев острым паром
Тепловые процессы. Теплообменники. Нагрев острым паром Презентация по физике Электромагнитная индукция. Опыты Фарадея Подготовка к ГИА
Презентация по физике Электромагнитная индукция. Опыты Фарадея Подготовка к ГИА  Презентация Законы преломления.
Презентация Законы преломления.