- Механика. Кинематика материальной точки

Содержание
- 2. Кинематика Ньютоновская (классическая) нерелятивистская механика. Механическое движение. Кинематика точки. Основные понятия кинематики – путь, перемещение, скорость,
- 3. Кинематика Основные понятия Кинематика занимается описанием движения без выяснения причин, его вызывающих. Всякое движение относительно. Тело,
- 4. Кинематики материальной точки Описать движение материальной точки означает указать её положение в пространстве в любой момент
- 5. Всякое движение можно разложить на два вида: поступательное и вращательное. Поступательное движение – это движение, при
- 6. Скорость и ускорение Скорость характеризует быстроту движения тела: Vср=Δr/Δt – средняя скорость движения v = dr/dt
- 7. Скорость и ускорение
- 8. Уравнение движения с постоянным ускорением a = const ⇨ dv/dt = a ⇨ v = v0
- 9. Кинематика вращательного движения Вращательное движение характеризуется углом поворота, угловой скоростью и угловым ускорением. Соответствующий угол поворота
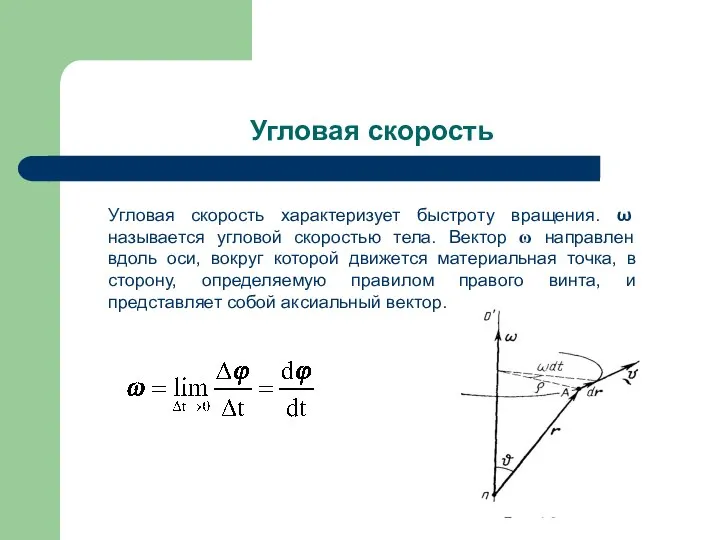
- 10. Угловая скорость Угловая скорость характеризует быстроту вращения. ω называется угловой скоростью тела. Вектор ω направлен вдоль
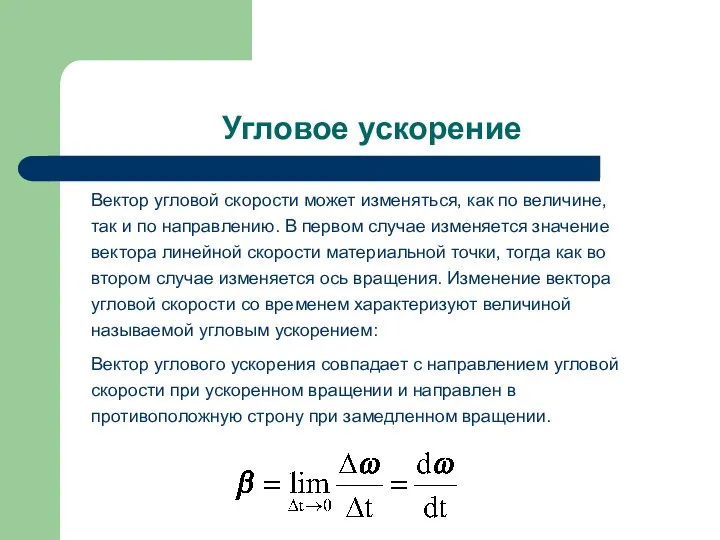
- 11. Угловое ускорение Вектор угловой скорости может изменяться, как по величине, так и по направлению. В первом
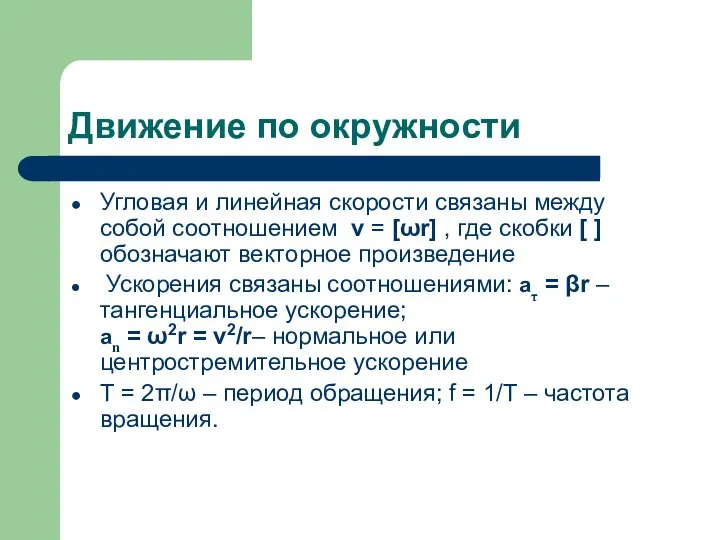
- 12. Движение по окружности Угловая и линейная скорости связаны между собой соотношением v = [ωr] , где
- 14. Скачать презентацию
Кинематика
Ньютоновская (классическая) нерелятивистская механика.
Механическое движение. Кинематика точки.
Основные понятия кинематики –
Кинематика
Ньютоновская (классическая) нерелятивистская механика.
Механическое движение. Кинематика точки.
Основные понятия кинематики –
Кинематика
Основные понятия
Кинематика занимается описанием движения без выяснения причин, его вызывающих.
Всякое движение
Кинематика
Основные понятия
Кинематика занимается описанием движения без выяснения причин, его вызывающих.
Всякое движение
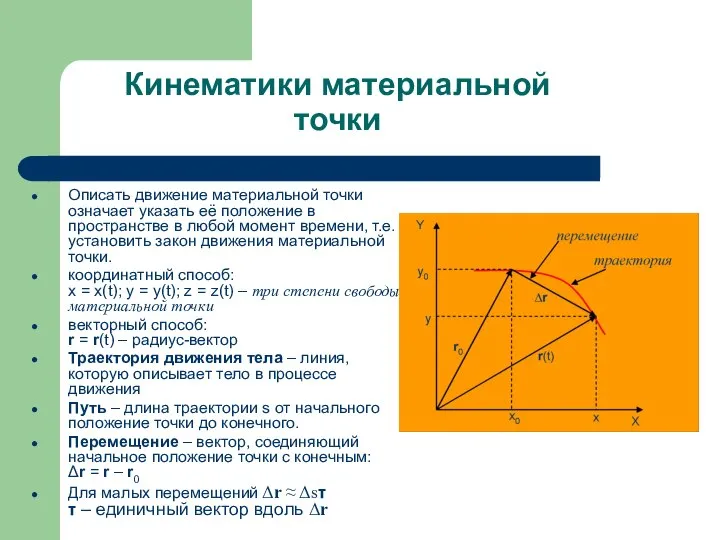
Кинематики материальной точки
Описать движение материальной точки означает указать её положение в
Кинематики материальной точки
Описать движение материальной точки означает указать её положение в
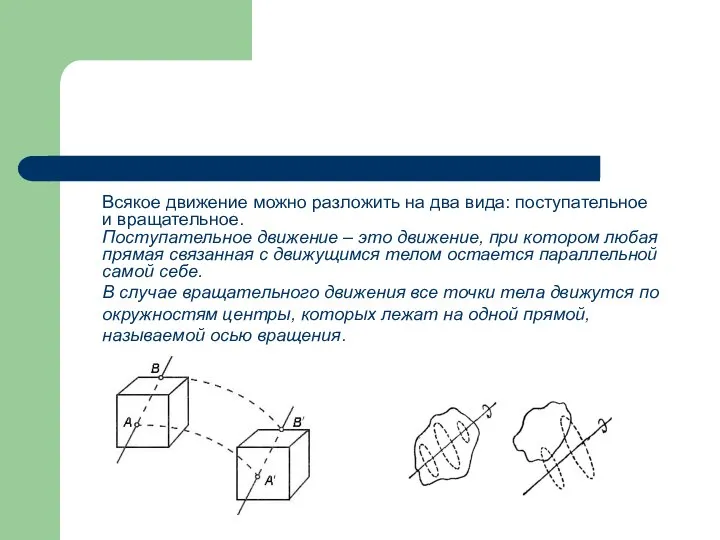
Всякое движение можно разложить на два вида: поступательное и вращательное.
Поступательное
Всякое движение можно разложить на два вида: поступательное и вращательное.
Поступательное
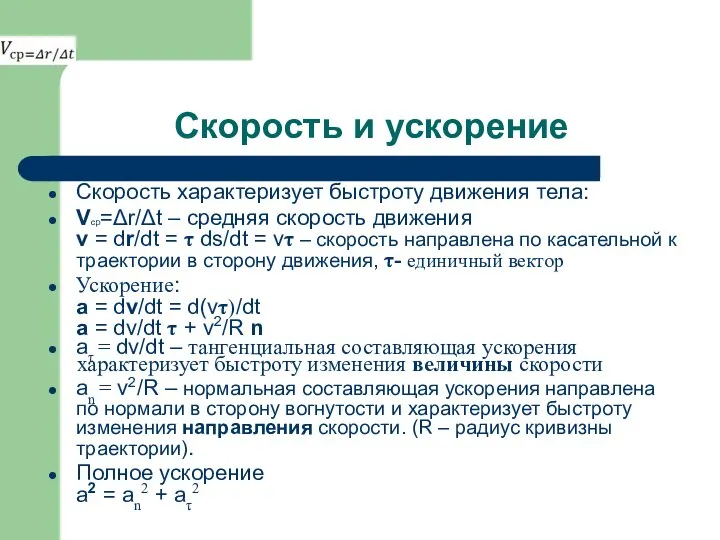
Скорость и ускорение
Скорость характеризует быстроту движения тела:
Vср=Δr/Δt – средняя скорость движения
v
Скорость и ускорение
Скорость характеризует быстроту движения тела:
Vср=Δr/Δt – средняя скорость движения
v
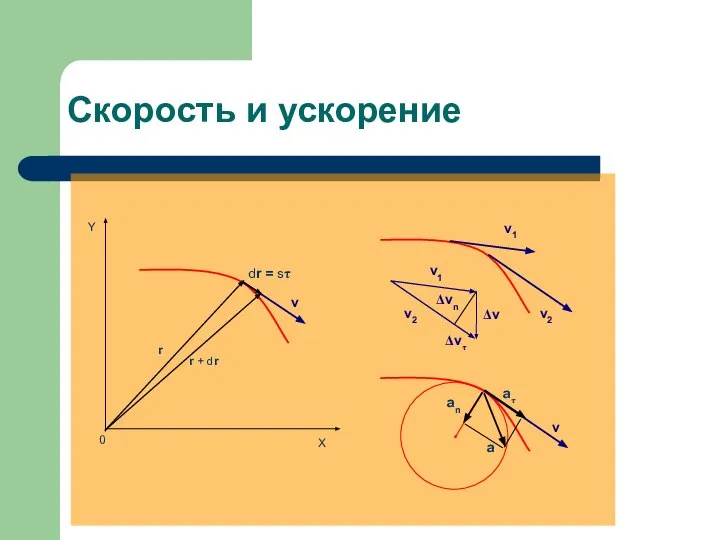
Скорость и ускорение
Скорость и ускорение
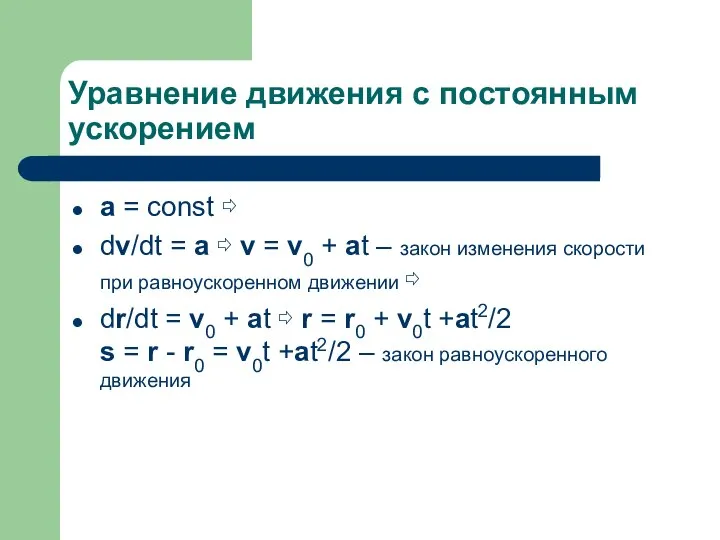
Уравнение движения с постоянным ускорением
a = const ⇨
dv/dt = a
Уравнение движения с постоянным ускорением
a = const ⇨
dv/dt = a
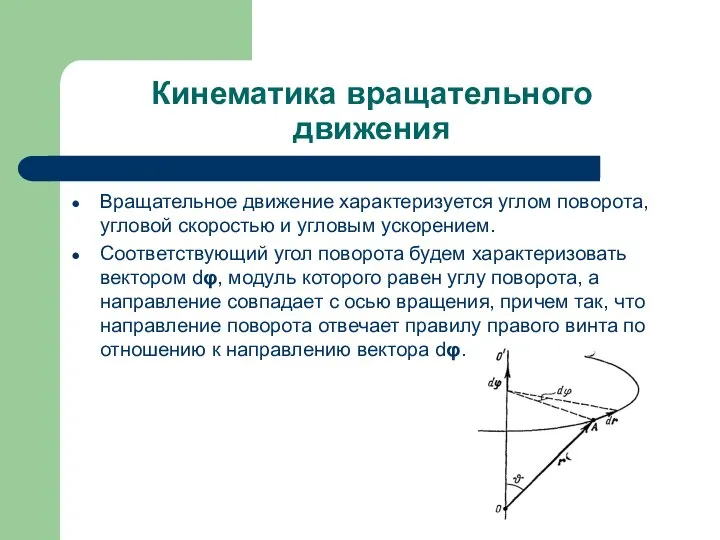
Кинематика вращательного движения
Вращательное движение характеризуется углом поворота, угловой скоростью и угловым
Кинематика вращательного движения
Вращательное движение характеризуется углом поворота, угловой скоростью и угловым
Угловая скорость
Угловая скорость характеризует быстроту вращения. ω называется угловой скоростью тела.
Угловая скорость
Угловая скорость характеризует быстроту вращения. ω называется угловой скоростью тела.
Угловое ускорение
Вектор угловой скорости может изменяться, как по величине, так и
Угловое ускорение
Вектор угловой скорости может изменяться, как по величине, так и
Движение по окружности
Угловая и линейная скорости связаны между собой соотношением v
Движение по окружности
Угловая и линейная скорости связаны между собой соотношением v
 Электрическое поле. Графическое изображение электрических полей
Электрическое поле. Графическое изображение электрических полей История развития электрического освещения
История развития электрического освещения Способы выполнения осветительных сетей
Способы выполнения осветительных сетей 11 класс «Электромагнитные волны»
11 класс «Электромагнитные волны» История развития энергетики. Циклы этногенеза
История развития энергетики. Циклы этногенеза Характеристика автомобиля как объекта ремонта
Характеристика автомобиля как объекта ремонта Передачи винт-гайка
Передачи винт-гайка Измерение напряжения на различных участках электрической цепи. Лабораторная работа № 5
Измерение напряжения на различных участках электрической цепи. Лабораторная работа № 5 Энергия. Виды энергии
Энергия. Виды энергии Электрооборудование автомобилей. Системы автоматического управления тормозами. (Урок 14)
Электрооборудование автомобилей. Системы автоматического управления тормозами. (Урок 14) Закон Ома для участка цепи Цель урока: Установить зависимость между силой тока, напряжением на участке цепи и сопротивлением этог
Закон Ома для участка цепи Цель урока: Установить зависимость между силой тока, напряжением на участке цепи и сопротивлением этог Философские проблемы науки и техники. Классическая механика. (Лекция 5)
Философские проблемы науки и техники. Классическая механика. (Лекция 5) Двигатели внутреннего сгорания. История науки и техники. Часть 3,
Двигатели внутреннего сгорания. История науки и техники. Часть 3, Лабораторно-практическое занятие № 5. Ремонт ходовой части. Ремонт электрооборудования
Лабораторно-практическое занятие № 5. Ремонт ходовой части. Ремонт электрооборудования Силы Ампера и Лоренца 11 класс
Силы Ампера и Лоренца 11 класс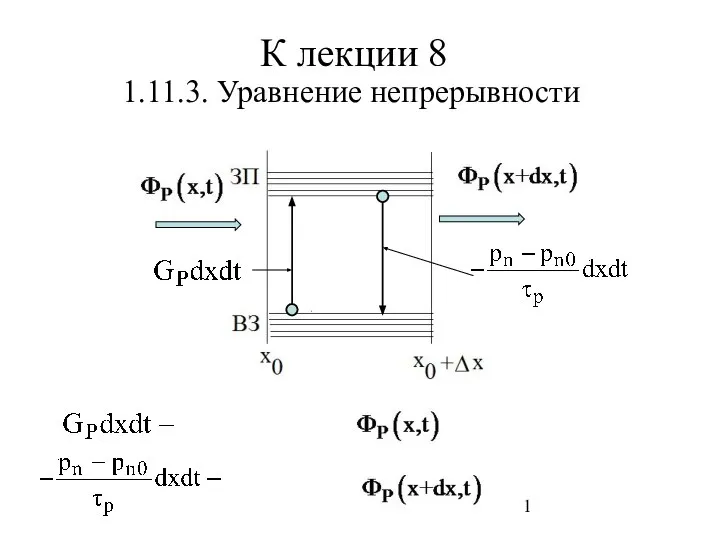 Уравнение непрерывности
Уравнение непрерывности Измерение температуры
Измерение температуры Законы сохранения в механике
Законы сохранения в механике Векторлар өрісінің циркуляциясы, роторы
Векторлар өрісінің циркуляциясы, роторы Материальные расчеты равновесных ВТП
Материальные расчеты равновесных ВТП Физические процессы в диэлектриках. Электропроводность диэлектриков
Физические процессы в диэлектриках. Электропроводность диэлектриков Теплопроводность. Дифференциальное уравнение теплопроводности
Теплопроводность. Дифференциальное уравнение теплопроводности Презентация по физике "Интерференция света 9 класс" - скачать
Презентация по физике "Интерференция света 9 класс" - скачать  Тиждень фізики в Кириківській ЗОШ 1 – 3 ст. 11.11.2014 – 15.11.2014 н.р.
Тиждень фізики в Кириківській ЗОШ 1 – 3 ст. 11.11.2014 – 15.11.2014 н.р. Проектирование деревообрабатывающего оборудования и инструмента. Элементы узлов
Проектирование деревообрабатывающего оборудования и инструмента. Элементы узлов Голография. Лекция 16(3)
Голография. Лекция 16(3) Аттестационная работа. Бурение нефтяных и газовых скважин. Методика расчета утяжеленных бурильных труб
Аттестационная работа. Бурение нефтяных и газовых скважин. Методика расчета утяжеленных бурильных труб Лазер – чудо ХХ века Борисова Мария 2007-2008
Лазер – чудо ХХ века Борисова Мария 2007-2008