- Определение реакций опор твёрдого тела. Расчётная лабораторная работа № 4

Содержание
- 2. Содержание 1. Цель лабораторной работы 2. Основные понятия и определения 3. Метод двойного проецирования 4. Момент
- 3. 1. Цель лабораторной работы Отработка навыков составления расчётных схем и уравнений равновесия для узлов и тел,
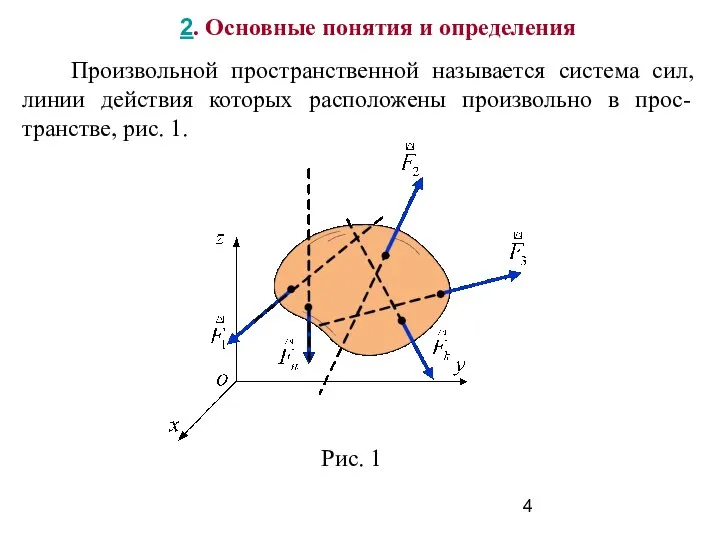
- 4. 2. Основные понятия и определения Произвольной пространственной называется система сил, линии действия которых расположены произвольно в
- 5. Произвольная пространственная система сил может быть приведена к силе, равной главному вектору и приложенной в произвольном
- 6. При равновесии тела под действием произвольной простран-ственной системы сил выполняются векторные условия равно-весия: Из векторных условий
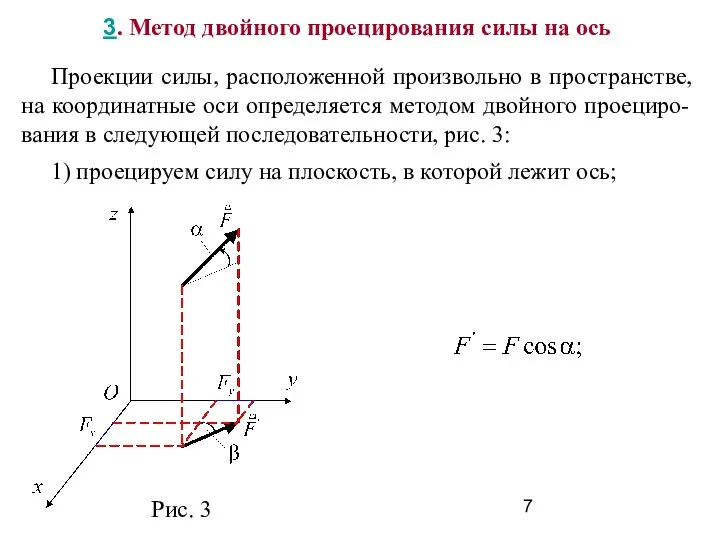
- 7. 3. Метод двойного проецирования силы на ось Проекции силы, расположенной произвольно в пространстве, на координатные оси
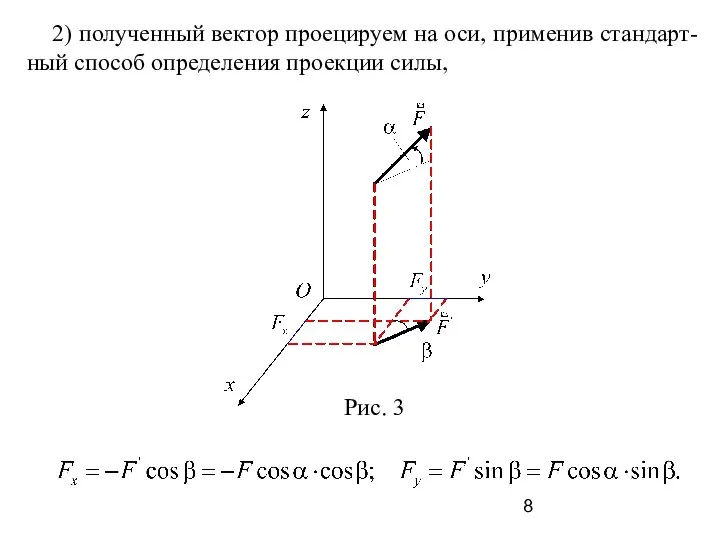
- 8. 2) полученный вектор проецируем на оси, применив стандарт-ный способ определения проекции силы,
- 9. Пример 1. Определить проекции силы на координатные оси, рис. 4. Проекции силы на оси x, y,
- 10. 4. Момент силы относительно оси Момент силы относительно оси характеризует вращательную способность силы относительно выбранной оси,
- 11. Момент силы относительно оси равен нулю в следующих случаях: 1) сила параллельна оси; 2) сила лежит
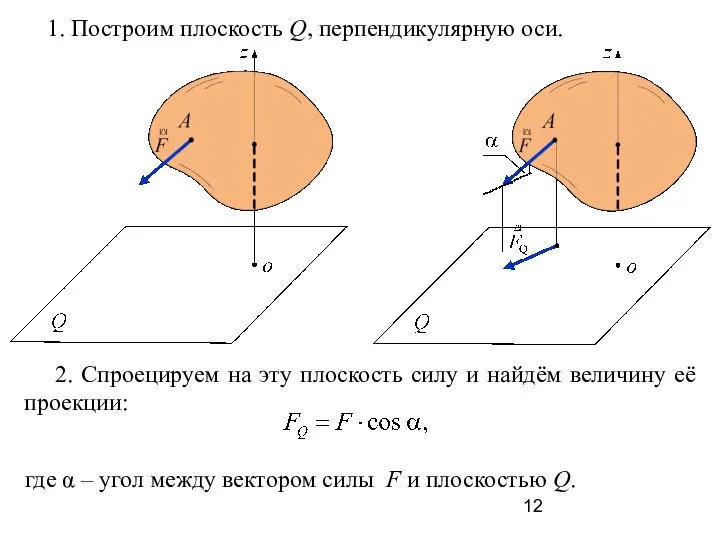
- 12. 1. Построим плоскость Q, перпендикулярную оси. 2. Спроецируем на эту плоскость силу и найдём величину её
- 13. 3. Из точки пересечения оси z с плоскостью (точка О) на линию действия силы построим перпендикуляр
- 14. 5. Применение теоремы Вариньона Если известны углы наклона силы к плоскостям координат-ных осей, то для вычисления
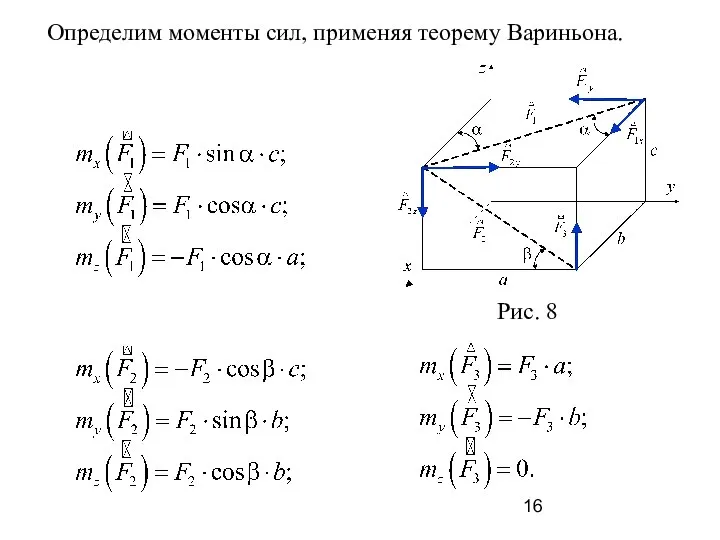
- 15. Пример 2. Определить моменты сил относительно осей x, y, z с применением теоремы Вариньона, рис. 7.
- 16. Определим моменты сил, применяя теорему Вариньона.
- 18. 6. План решения задач статики При решении задач будем придерживаться следующего плана. 1. Выбрать тело (конструкцию,
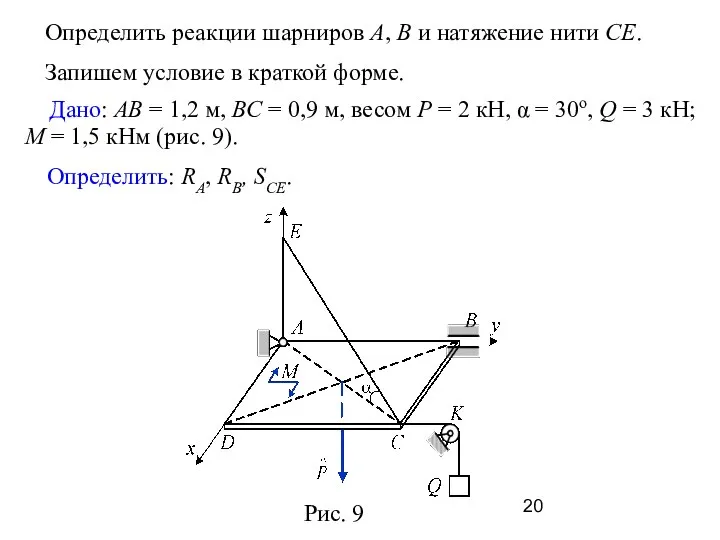
- 19. 7. Пример выполнения задания Условие задания: однородная прямоугольная пластина размерами АВ = 1,2 м, ВС =
- 20. Определить реакции шарниров А, В и натяжение нити СЕ. Запишем условие в краткой форме. Дано: АВ
- 21. 1. Рассмотрим равновесие пластины. 2. На пластину действуют активные силы и момент: P, Q, M. 3.
- 22. 4. Пластина находится в равновесии под действием прос-транственной произвольной системы сил. Поэтому составим для неё 6
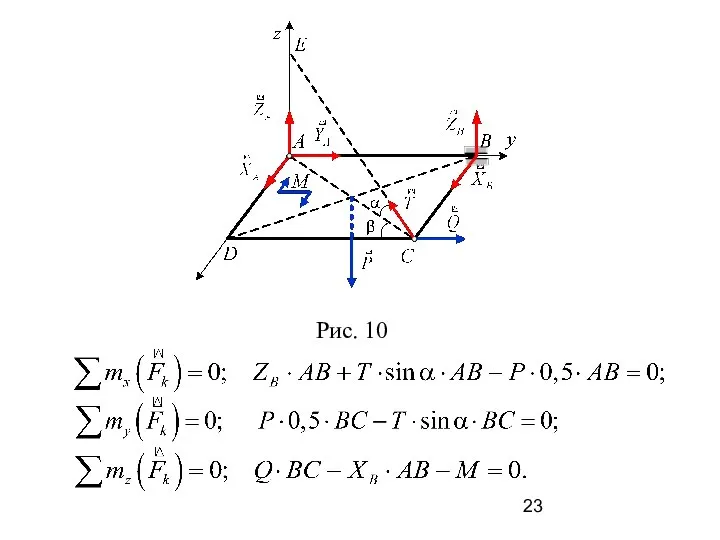
- 24. Решаем полученную систему уравнений способом подстановки. Из уравнения моментов относительно оси x: Из уравнения моментов относительно
- 25. Из уравнения проекций сил на ось z: Из уравнения проекций сил на ось x: Из уравнения
- 27. Скачать презентацию

Содержание
1. Цель лабораторной работы
2. Основные понятия и определения
Содержание
1. Цель лабораторной работы
2. Основные понятия и определения
1. Цель лабораторной работы
Отработка навыков составления расчётных схем и
1. Цель лабораторной работы
Отработка навыков составления расчётных схем и
2. Основные понятия и определения
Произвольной пространственной называется система сил, линии
2. Основные понятия и определения
Произвольной пространственной называется система сил, линии
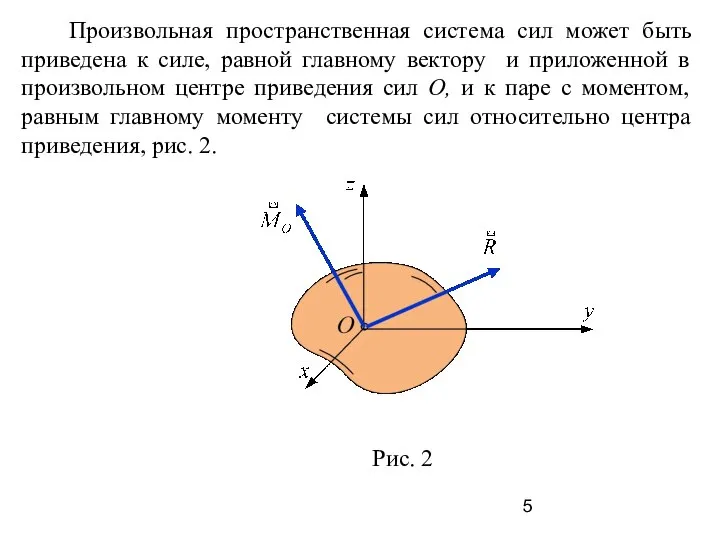
Произвольная пространственная система сил может быть приведена к силе, равной
Произвольная пространственная система сил может быть приведена к силе, равной
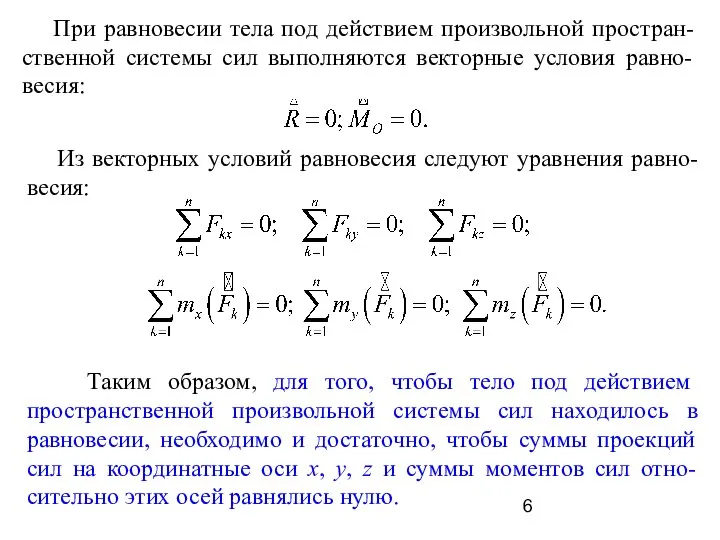
При равновесии тела под действием произвольной простран-ственной системы сил выполняются
При равновесии тела под действием произвольной простран-ственной системы сил выполняются
3. Метод двойного проецирования силы на ось
Проекции силы, расположенной произвольно
3. Метод двойного проецирования силы на ось
Проекции силы, расположенной произвольно
2) полученный вектор проецируем на оси, применив стандарт-ный способ определения
2) полученный вектор проецируем на оси, применив стандарт-ный способ определения
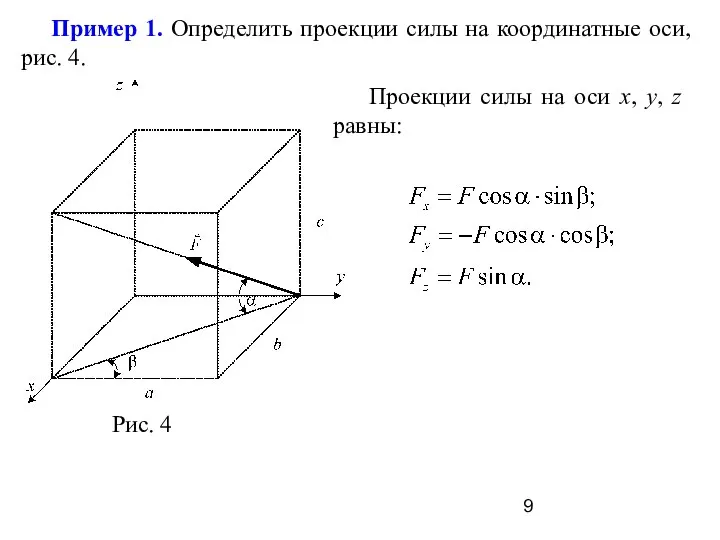
Пример 1. Определить проекции силы на координатные оси, рис. 4.
Пример 1. Определить проекции силы на координатные оси, рис. 4.
4. Момент силы относительно оси
Момент силы относительно оси характеризует
4. Момент силы относительно оси
Момент силы относительно оси характеризует

Момент силы относительно оси равен нулю в следующих случаях:
1)
Момент силы относительно оси равен нулю в следующих случаях:
1)
1. Построим плоскость Q, перпендикулярную оси.
2. Спроецируем на эту
1. Построим плоскость Q, перпендикулярную оси.
2. Спроецируем на эту

3. Из точки пересечения оси z с плоскостью (точка О)
3. Из точки пересечения оси z с плоскостью (точка О)
5. Применение теоремы Вариньона
Если известны углы наклона силы к
5. Применение теоремы Вариньона
Если известны углы наклона силы к

Пример 2. Определить моменты сил относительно осей x, y, z
Пример 2. Определить моменты сил относительно осей x, y, z
Определим моменты сил, применяя теорему Вариньона.
Определим моменты сил, применяя теорему Вариньона.


6. План решения задач статики
При решении задач будем придерживаться
6. План решения задач статики
При решении задач будем придерживаться

7. Пример выполнения задания
Условие задания: однородная прямоугольная пластина размерами АВ
7. Пример выполнения задания
Условие задания: однородная прямоугольная пластина размерами АВ
Определить реакции шарниров А, В и натяжение нити СЕ.
Запишем
Определить реакции шарниров А, В и натяжение нити СЕ.
Запишем

1. Рассмотрим равновесие пластины.
2. На пластину действуют активные силы
1. Рассмотрим равновесие пластины.
2. На пластину действуют активные силы
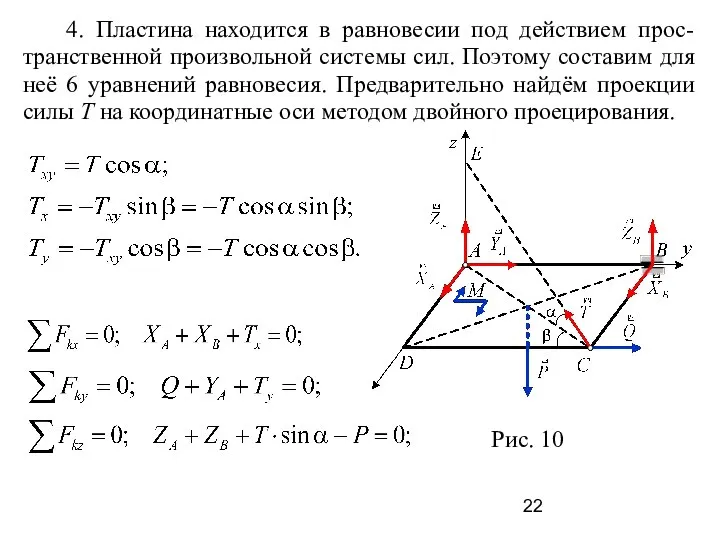
4. Пластина находится в равновесии под действием прос-транственной произвольной системы
4. Пластина находится в равновесии под действием прос-транственной произвольной системы

Решаем полученную систему уравнений способом подстановки.
Из уравнения моментов относительно
Решаем полученную систему уравнений способом подстановки.
Из уравнения моментов относительно

Из уравнения проекций сил на ось z:
Из уравнения проекций
Из уравнения проекций сил на ось z:
Из уравнения проекций
 Оптоэлектронные приборы
Оптоэлектронные приборы Лауреат Нобелевской премии Альфред Кастлер
Лауреат Нобелевской премии Альфред Кастлер Електростатичне поле
Електростатичне поле Методика проведения измерений размеров наночастиц водных неорганических суспензий
Методика проведения измерений размеров наночастиц водных неорганических суспензий Дифракция. Границы применимости геометрической оптики
Дифракция. Границы применимости геометрической оптики Презентация по физике "Закон ома для цепи" - скачать
Презентация по физике "Закон ома для цепи" - скачать  Понятие о трехфазных цепях
Понятие о трехфазных цепях Парогенераторы АЭС. Место и роль ПГ в схеме АЭС. (Тема 1)
Парогенераторы АЭС. Место и роль ПГ в схеме АЭС. (Тема 1) Историческая справка. Звук в воздухе
Историческая справка. Звук в воздухе Электрическая цепь и электрическая схема
Электрическая цепь и электрическая схема Гамма-излучение. (Тема 1.5)
Гамма-излучение. (Тема 1.5) Benefits and risks of artificial intelligence
Benefits and risks of artificial intelligence Диффузия водорода в металлах
Диффузия водорода в металлах Кинематика материальной точки
Кинематика материальной точки Равновесие тел
Равновесие тел  Презентация на тему :тепловые двигатели.
Презентация на тему :тепловые двигатели. Плавание тел. Условия плавания тел
Плавание тел. Условия плавания тел Механические свойства материалов
Механические свойства материалов Электрический ток в металлах
Электрический ток в металлах Плавление и отвердевание кристаллических тел
Плавление и отвердевание кристаллических тел Судовые электроэнергетические системы. Содержание программы ГИА
Судовые электроэнергетические системы. Содержание программы ГИА Наглядное пособие по теоретической механике
Наглядное пособие по теоретической механике Система электроснабжения нового микрорайона города Архангельска
Система электроснабжения нового микрорайона города Архангельска Презентация по физике МАССА. ВЕС и НЕВЕСОМОСТЬ. АВТОРЫ: учащиеся 9 класса Научный руководитель: Васильева Марина Виктор
Презентация по физике МАССА. ВЕС и НЕВЕСОМОСТЬ. АВТОРЫ: учащиеся 9 класса Научный руководитель: Васильева Марина Виктор Презентация по физике "И.В.Курчатов(1)" - скачать бесплатно
Презентация по физике "И.В.Курчатов(1)" - скачать бесплатно Постоянный ток -2
Постоянный ток -2 Второе начало термодинамики. Циклы. (Лекция 10)
Второе начало термодинамики. Циклы. (Лекция 10) Элионная технология в микро- и наноиндустрии
Элионная технология в микро- и наноиндустрии