- Особенности движения шагохода

Содержание
- 2. Движение шагохода Любой шагоход перемещается с помощью сгибающихся или вращающихся на шарнире опорных конструкций (“ног”) с
- 3. На данном рисунке показан простой алгоритм ходьбы гексапода. Черными кружками показаны ноги, поднятые в воздух. Белыми
- 4. Положение ног при смене курса движения (иначе поворот шагохода) Для смены курса движения шагохода можно прибегнуть
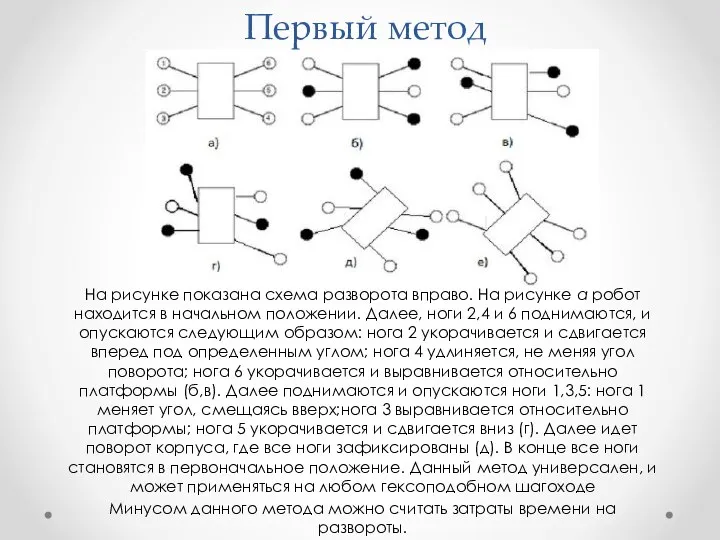
- 5. Первый метод На рисунке показана схема разворота вправо. На рисунке а робот находится в начальном положении.
- 7. Скачать презентацию
Движение шагохода
Любой шагоход перемещается с помощью сгибающихся или вращающихся на шарнире
Движение шагохода
Любой шагоход перемещается с помощью сгибающихся или вращающихся на шарнире
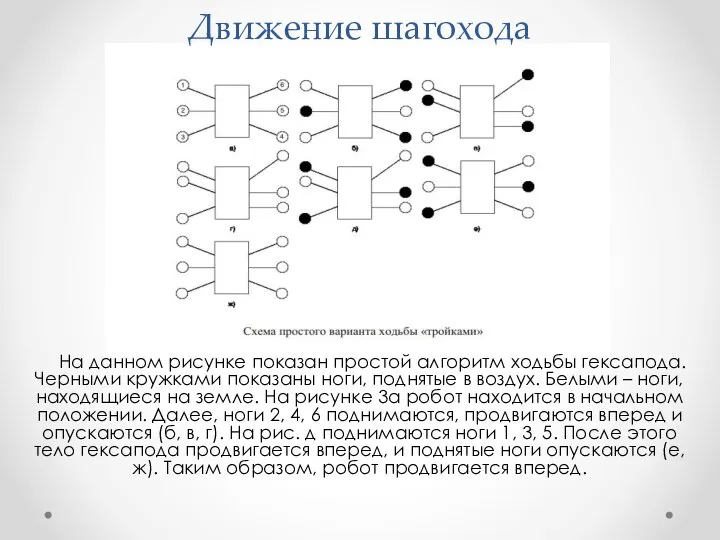
На данном рисунке показан простой алгоритм ходьбы гексапода. Черными кружками
На данном рисунке показан простой алгоритм ходьбы гексапода. Черными кружками
Положение ног при смене курса движения (иначе поворот шагохода)
Для смены
Положение ног при смене курса движения (иначе поворот шагохода)
Для смены
Первый метод
На рисунке показана схема разворота вправо. На рисунке а робот
Первый метод
На рисунке показана схема разворота вправо. На рисунке а робот
 Прикладная механика. Часть II. Механика деформируемого твердого тела
Прикладная механика. Часть II. Механика деформируемого твердого тела Электрические явления в атмосфере
Электрические явления в атмосфере  Формула Ляме
Формула Ляме Развитие теоретических принципов лазерной техники. Вклад А.М. Прохорова и Н.Г. Басова
Развитие теоретических принципов лазерной техники. Вклад А.М. Прохорова и Н.Г. Басова Второй закон термодинамики и работоспособность термодинамических систем. (Лекция 6)
Второй закон термодинамики и работоспособность термодинамических систем. (Лекция 6) Комплексные методы анализа ГХ-МС и ВЭЖХ-МС
Комплексные методы анализа ГХ-МС и ВЭЖХ-МС Оптика. Геометрическая оптика
Оптика. Геометрическая оптика Свободные колебания системы с несколькими степенями свободы
Свободные колебания системы с несколькими степенями свободы Магнитное поле и его характеристики
Магнитное поле и его характеристики Молекулярно-кинетическая теория газов. (Лекция 2)
Молекулярно-кинетическая теория газов. (Лекция 2) Великий инженер Василий Григорьевич Шухов Авторы: учащиеся 8 «Б» класса МОУ «Киришский лицей» Ленинградская область г. Кириши
Великий инженер Василий Григорьевич Шухов Авторы: учащиеся 8 «Б» класса МОУ «Киришский лицей» Ленинградская область г. Кириши  Повторение темы: Тепловые явления
Повторение темы: Тепловые явления Трение в природе, технике, быту Интегрированный урок физика + биология + история Форма: деловая игра Класс: 6 б Дата: 18.03.2009 Учите
Трение в природе, технике, быту Интегрированный урок физика + биология + история Форма: деловая игра Класс: 6 б Дата: 18.03.2009 Учите Частицы и взаимодействия. Ускорители частиц. Элементарные частицы. Экспериментальное исследование структуры частиц. (Лекция 9)
Частицы и взаимодействия. Ускорители частиц. Элементарные частицы. Экспериментальное исследование структуры частиц. (Лекция 9)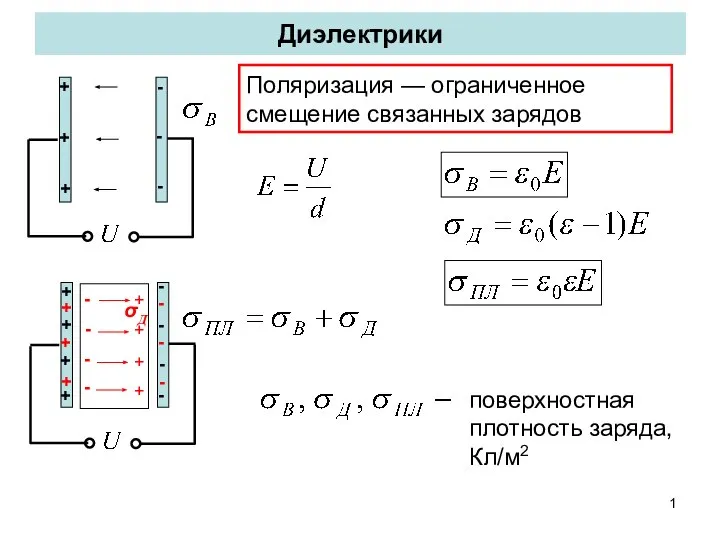 Диэлектрики
Диэлектрики Шкала електромагнітних хвиль
Шкала електромагнітних хвиль Твердые тела и их свойства
Твердые тела и их свойства Вакуумная базука
Вакуумная базука Теплообмен при кипении и конденсации
Теплообмен при кипении и конденсации II Закон термодинамики. Энтропия “S”- термодинамическая функция состояния [Дж/моль К] (Клаузиус)
II Закон термодинамики. Энтропия “S”- термодинамическая функция состояния [Дж/моль К] (Клаузиус) Газовые законы
Газовые законы Организация внеклассной работы по физике в условиях модернизации образования
Организация внеклассной работы по физике в условиях модернизации образования Контрольная работа по теме РЫЧАГ БЛОК
Контрольная работа по теме РЫЧАГ БЛОК  Ядерные реакции. Энергия связи атомного ядра
Ядерные реакции. Энергия связи атомного ядра Электромагнитная индукция. Ханс Кристиан Эрстед – датский ученый (14.VIII.1777–9.III.1851)
Электромагнитная индукция. Ханс Кристиан Эрстед – датский ученый (14.VIII.1777–9.III.1851) Фильтры / кондиционеры охлаждающей жидкости
Фильтры / кондиционеры охлаждающей жидкости Конструкционные материалы на основе легких металлов: сплавы бериллия
Конструкционные материалы на основе легких металлов: сплавы бериллия Тепловое движение. Модель идеального газа
Тепловое движение. Модель идеального газа