- Планы ускорений плоских механизмов

Содержание
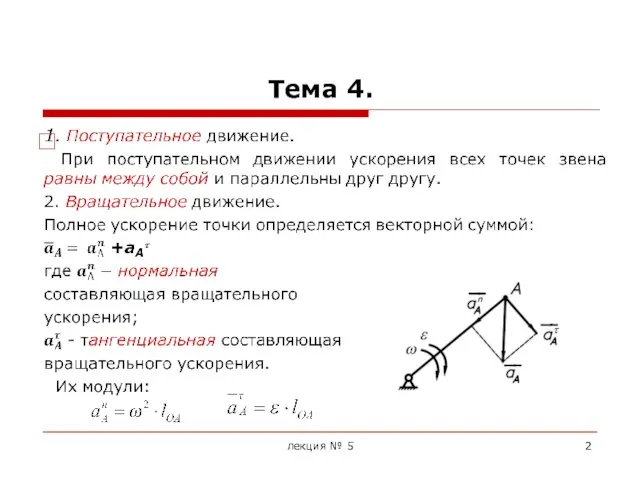
- 2. Тема 4. лекция № 5
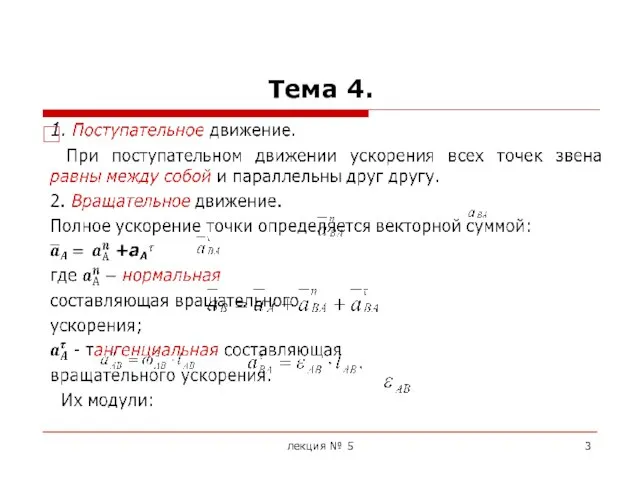
- 3. Тема 4. лекция № 5
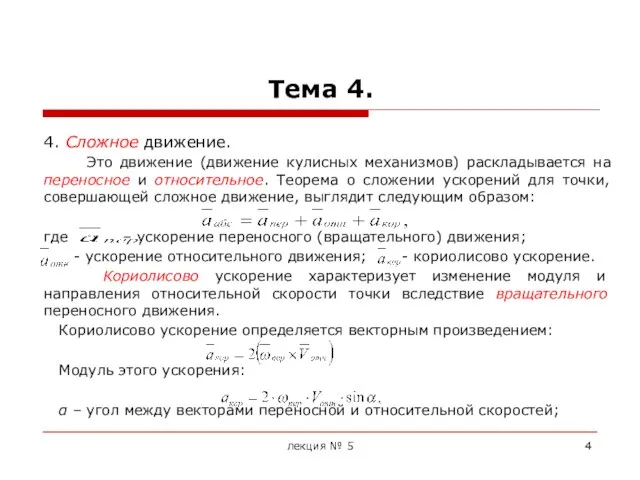
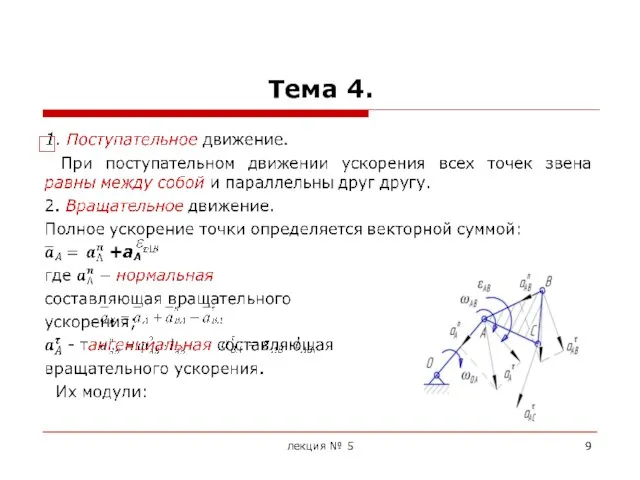
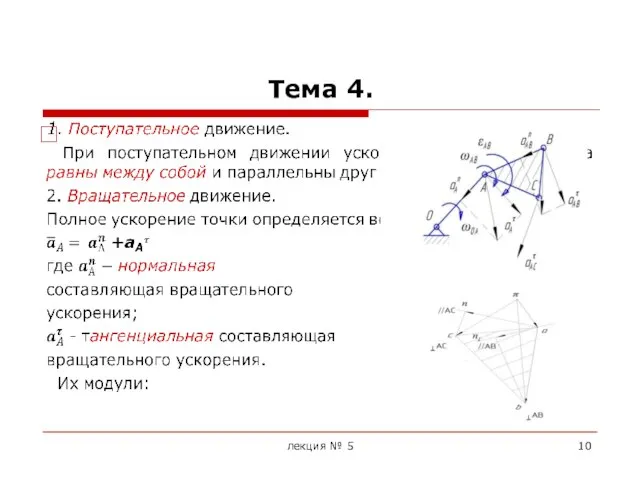
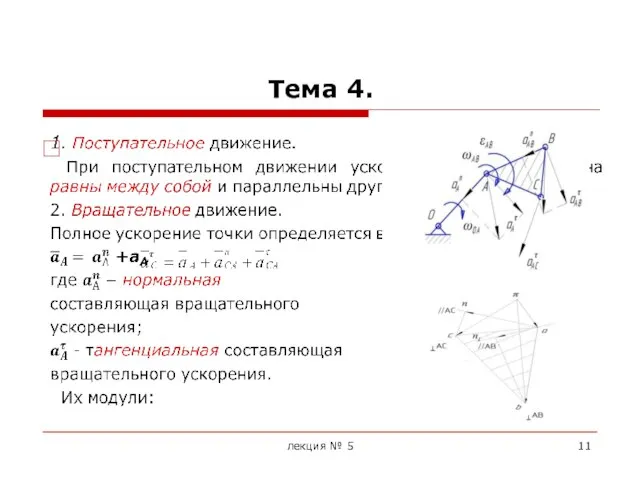
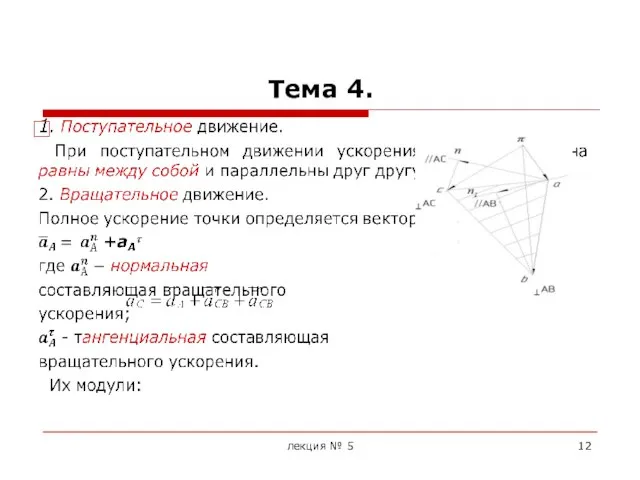
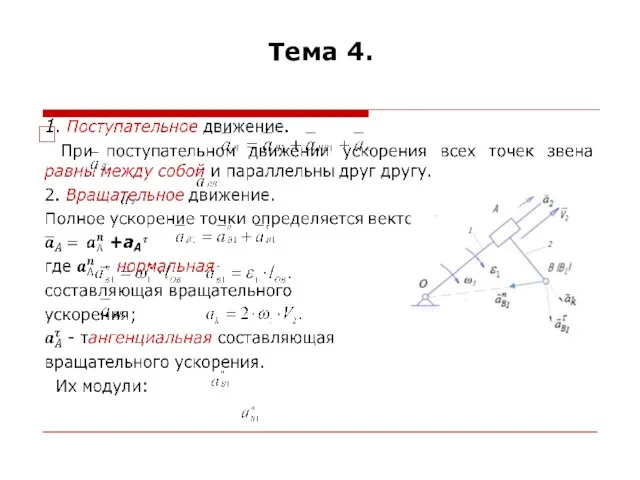
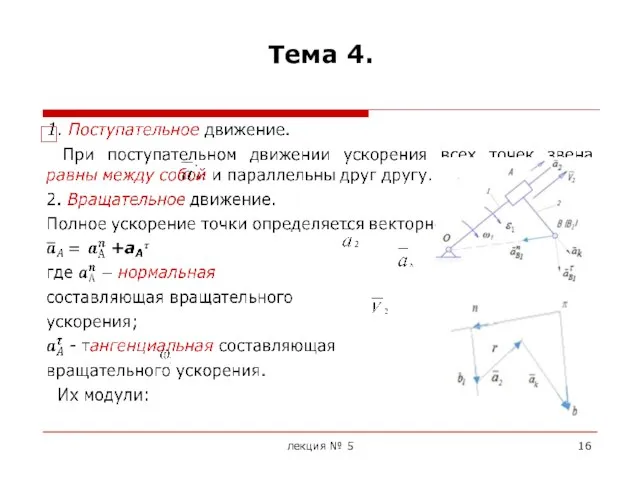
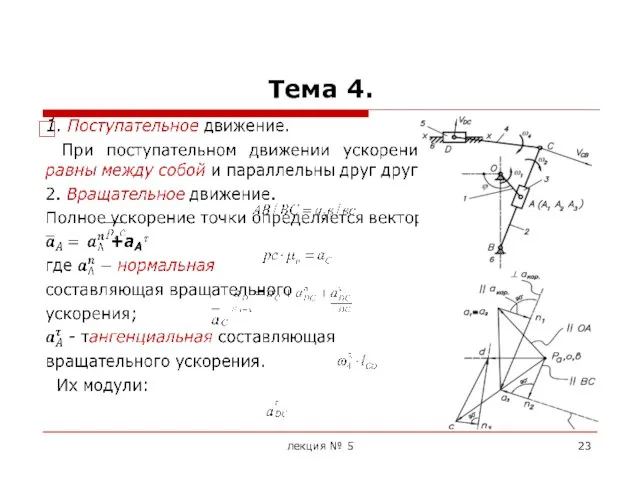
- 4. Тема 4. 4. Сложное движение. Это движение (движение кулисных механизмов) раскладывается на переносное и относительное. Теорема
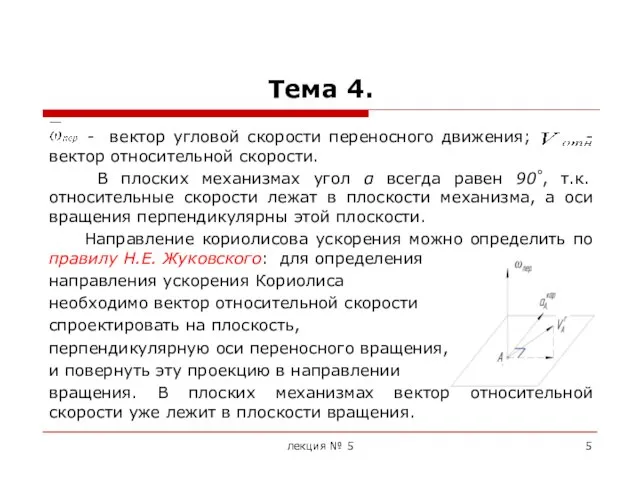
- 5. Тема 4. - вектор угловой скорости переносного движения; - вектор относительной скорости. В плоских механизмах угол
- 6. Тема 4. лекция № 5
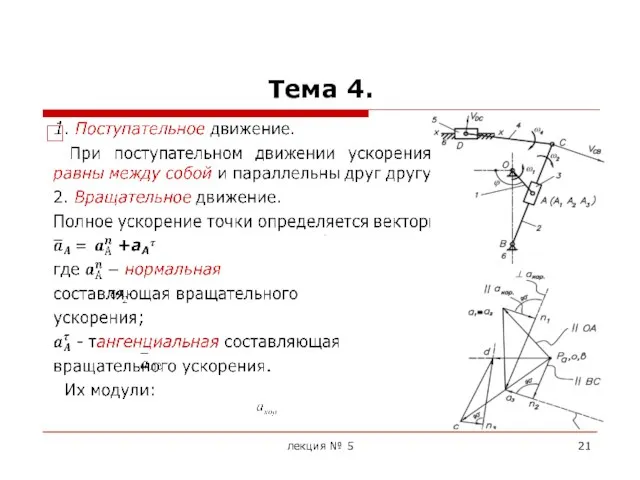
- 7. Тема 4. 5. На основе зависимостей между ускорениями точек при различных движениях звеньев определить величины и
- 8. Тема 4. Свойства плана ускорений: 1. Отрезки планов ускорений проходящие через полюс изображают абсолютные ускорения. Направление
- 9. Тема 4. лекция № 5
- 10. Тема 4. лекция № 5
- 11. Тема 4. лекция № 5
- 12. Тема 4. лекция № 5
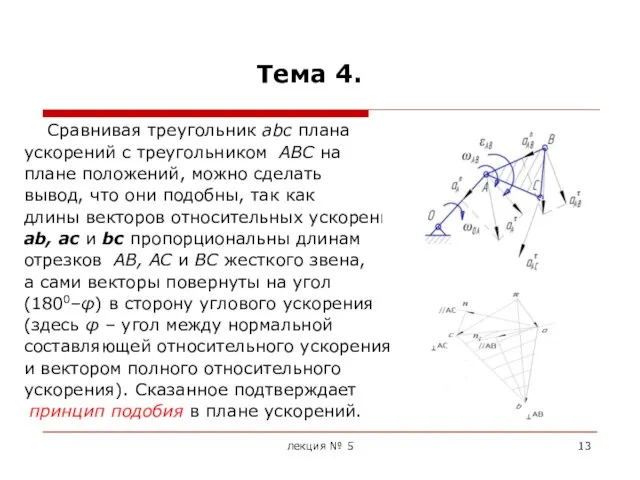
- 13. лекция № 5 Тема 4. Сравнивая треугольник abc плана ускорений с треугольником ABC на плане положений,
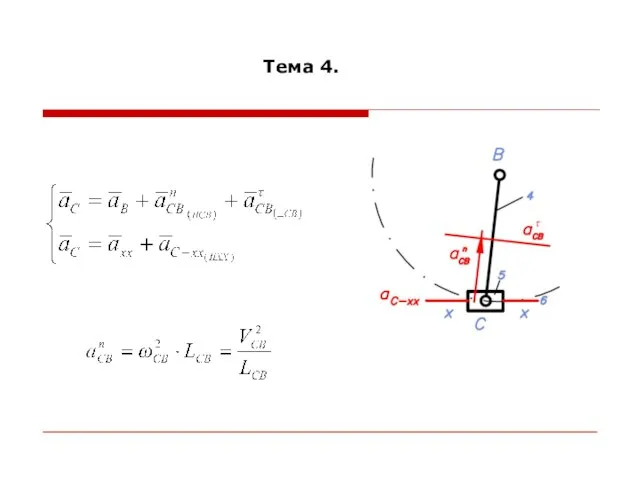
- 14. Тема 4. Пример 2. Определение ускорений точек звена, входящего в поступательную пару. Пусть известны длины звеньев,
- 15. Тема 4.
- 16. Тема 4. лекция № 5
- 17. Тема 4. После построения плана ускорений и определения значений ускорений всех характерных точек механизма переходят к
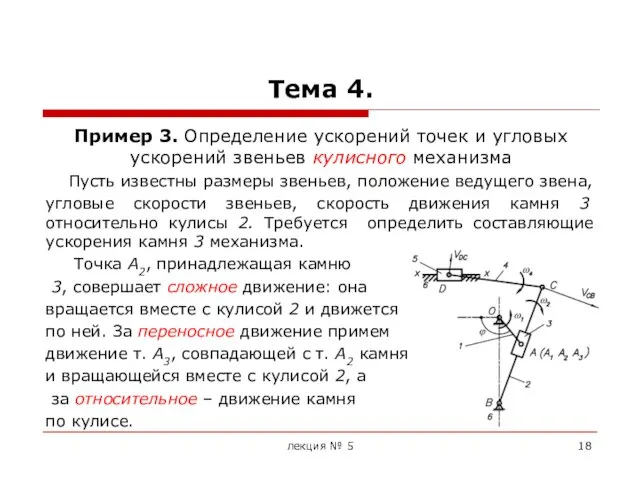
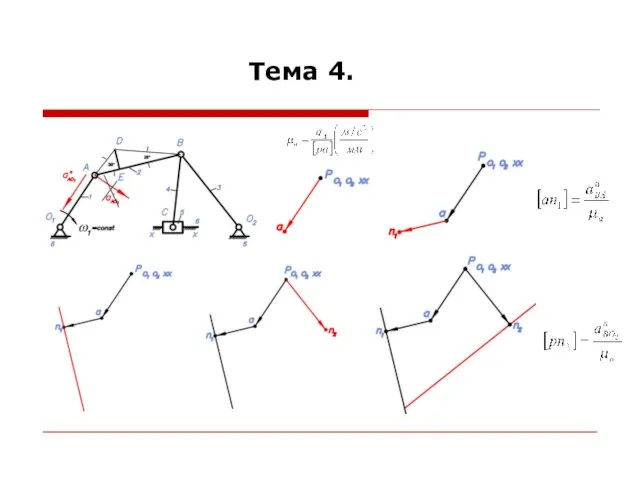
- 18. Тема 4. Пример 3. Определение ускорений точек и угловых ускорений звеньев кулисного механизма Пусть известны размеры
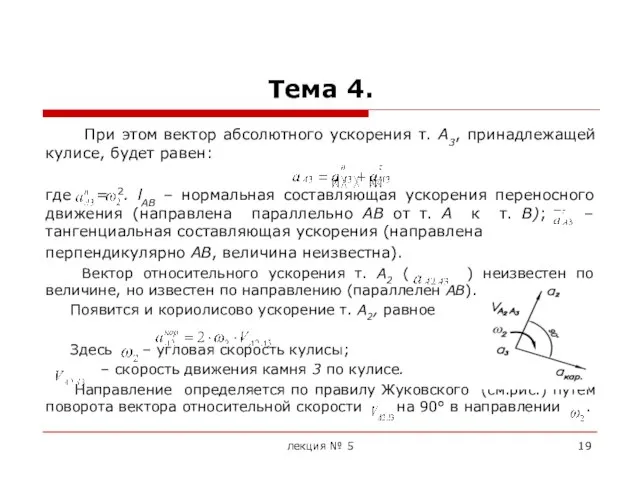
- 19. Тема 4. При этом вектор абсолютного ускорения т. А3, принадлежащей кулисе, будет равен: где = 2.
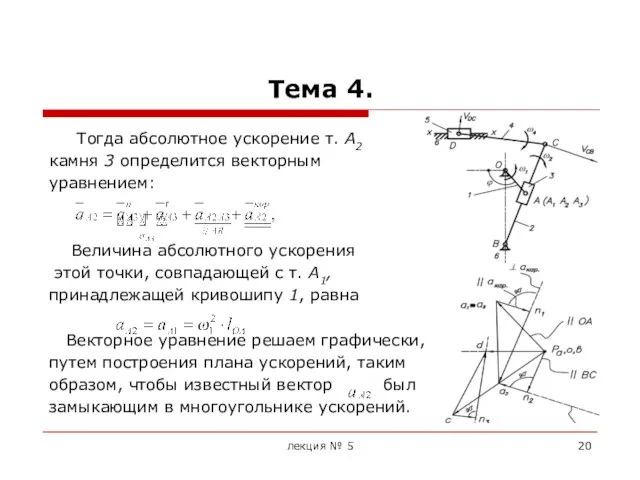
- 20. Тема 4. Тогда абсолютное ускорение т. А2 камня 3 определится векторным уравнением: Величина абсолютного ускорения этой
- 21. Тема 4. лекция № 5
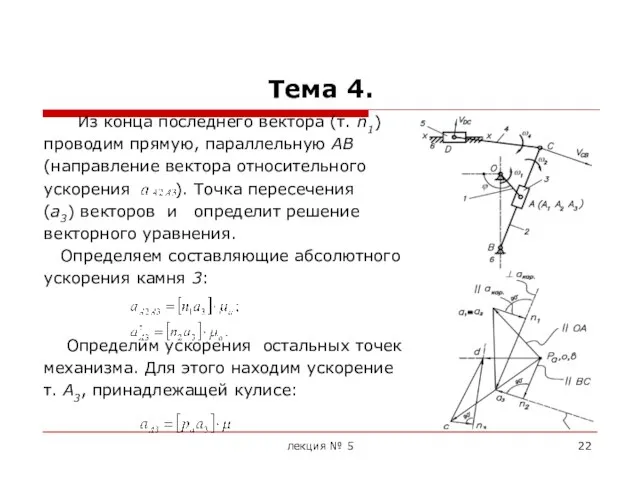
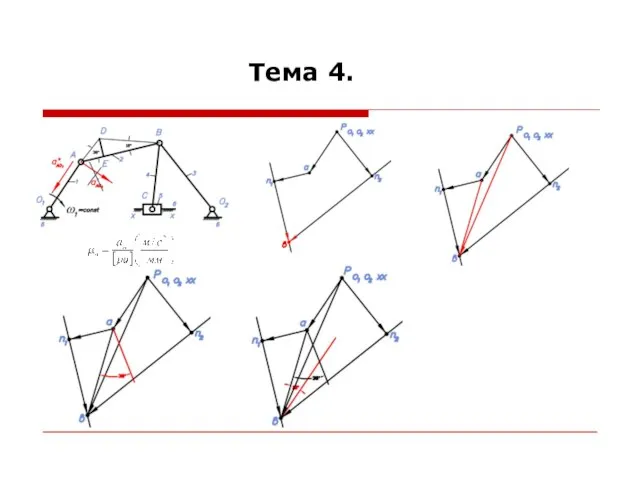
- 22. Тема 4. Из конца последнего вектора (т. n1) проводим прямую, параллельную АВ (направление вектора относительного ускорения
- 23. Тема 4. лекция № 5
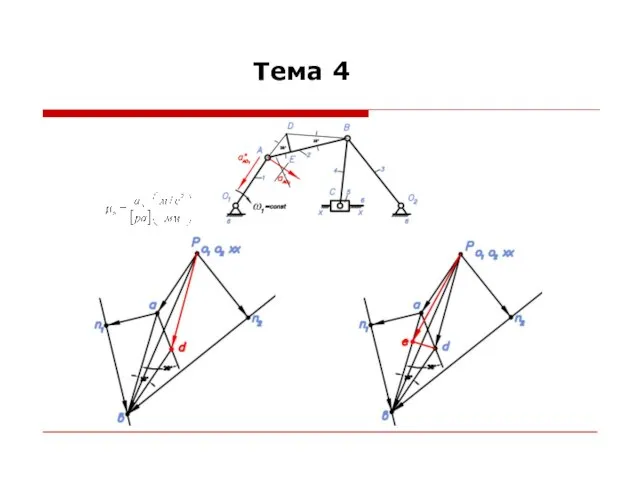
- 24. Тема 4. Точка d пересечения этого перпендикуляра с горизонтальной прямой, проведенной через полюс ра и представляющей
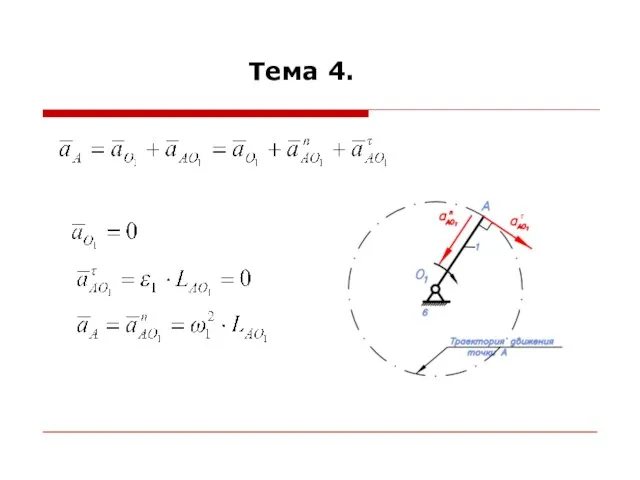
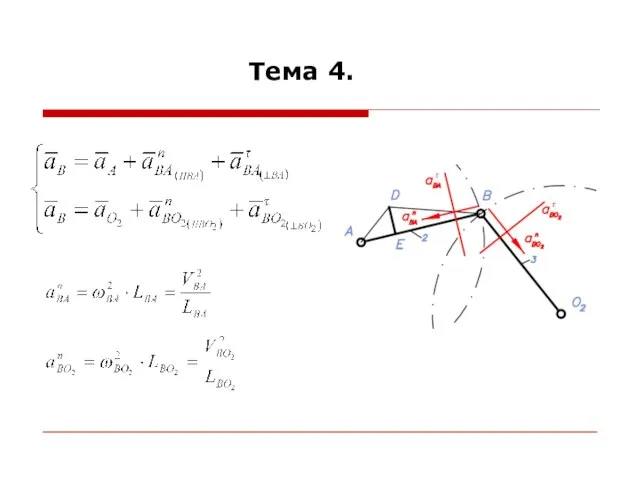
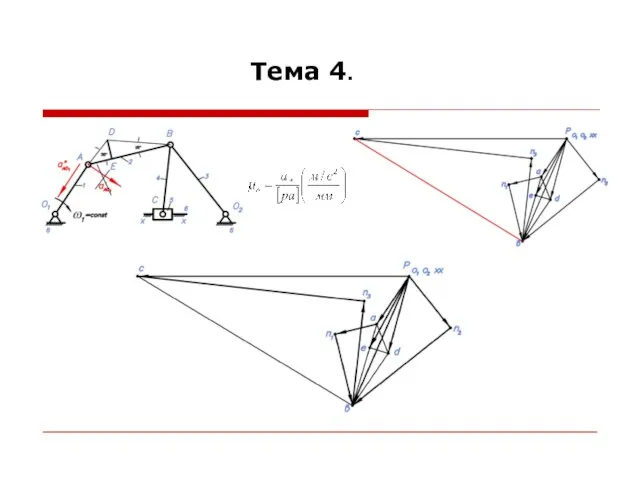
- 25. Пример 4. Определение ускорений точек и угловых ускорений звеньев рычажного механизма Тема 4.
- 26. Тема 4.
- 27. Тема 4.
- 28. Тема 4.
- 29. Тема 4.
- 30. Тема 4.
- 31. Тема 4
- 32. Тема 4.
- 33. Тема 4.
- 34. Тема 4.
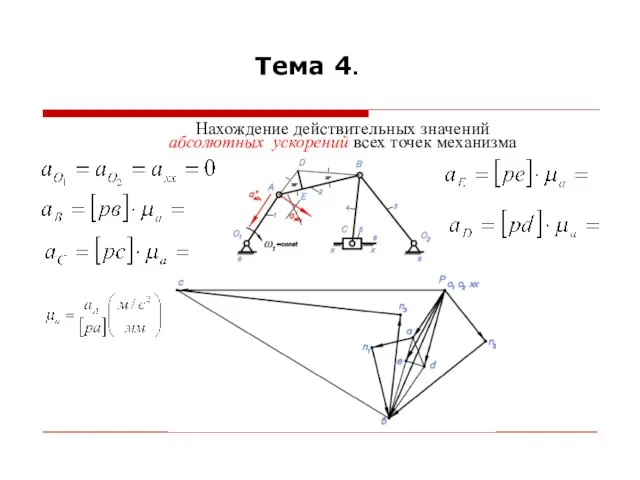
- 35. Тема 4. Нахождение действительных значений абсолютных ускорений всех точек механизма
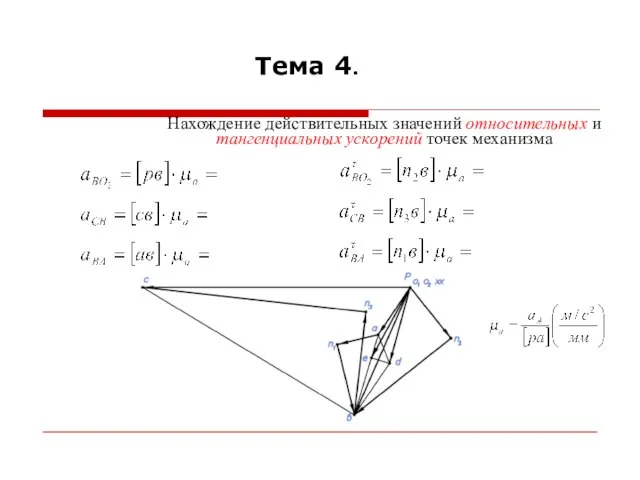
- 36. Тема 4. Нахождение действительных значений относительных и тангенциальных ускорений точек механизма
- 38. Скачать презентацию
Тема 4.
лекция № 5
Тема 4.
лекция № 5
Тема 4.
лекция № 5
Тема 4.
лекция № 5
Тема 4.
4. Сложное движение.
Это движение (движение кулисных механизмов)
Тема 4.
4. Сложное движение.
Это движение (движение кулисных механизмов)
Тема 4.
- вектор угловой скорости переносного движения; - вектор
Тема 4.
- вектор угловой скорости переносного движения; - вектор
Тема 4.
лекция № 5
Тема 4.
лекция № 5
Тема 4.
5. На основе зависимостей между ускорениями точек при
Тема 4.
5. На основе зависимостей между ускорениями точек при
Тема 4.
Свойства плана ускорений:
1. Отрезки планов ускорений проходящие через полюс
Тема 4.
Свойства плана ускорений:
1. Отрезки планов ускорений проходящие через полюс
Тема 4.
лекция № 5
Тема 4.
лекция № 5
Тема 4.
лекция № 5
Тема 4.
лекция № 5
Тема 4.
лекция № 5
Тема 4.
лекция № 5
Тема 4.
лекция № 5
Тема 4.
лекция № 5
лекция № 5
Тема 4.
Сравнивая треугольник abc плана
ускорений с
лекция № 5
Тема 4.
Сравнивая треугольник abc плана
ускорений с

Тема 4.
Пример 2. Определение ускорений точек звена, входящего в
поступательную
Тема 4.
Пример 2. Определение ускорений точек звена, входящего в
поступательную
Тема 4.
Тема 4.
Тема 4.
лекция № 5
Тема 4.
лекция № 5
Тема 4.
После построения плана ускорений и определения значений ускорений всех
Тема 4.
После построения плана ускорений и определения значений ускорений всех
Тема 4.
Пример 3. Определение ускорений точек и угловых ускорений звеньев кулисного
Тема 4.
Пример 3. Определение ускорений точек и угловых ускорений звеньев кулисного
Тема 4.
При этом вектор абсолютного ускорения т. А3, принадлежащей кулисе,
Тема 4.
При этом вектор абсолютного ускорения т. А3, принадлежащей кулисе,
Тема 4.
Тогда абсолютное ускорение т. А2
камня 3 определится векторным
уравнением:
Величина абсолютного
Тема 4.
Тогда абсолютное ускорение т. А2
камня 3 определится векторным
уравнением:
Величина абсолютного
Тема 4.
лекция № 5
Тема 4.
лекция № 5
Тема 4.
Из конца последнего вектора (т. n1)
проводим прямую, параллельную АВ
Тема 4.
Из конца последнего вектора (т. n1)
проводим прямую, параллельную АВ
Тема 4.
лекция № 5
Тема 4.
лекция № 5

Тема 4.
Точка d пересечения этого
перпендикуляра с горизонтальной прямой,
проведенной через
Тема 4.
Точка d пересечения этого
перпендикуляра с горизонтальной прямой,
проведенной через
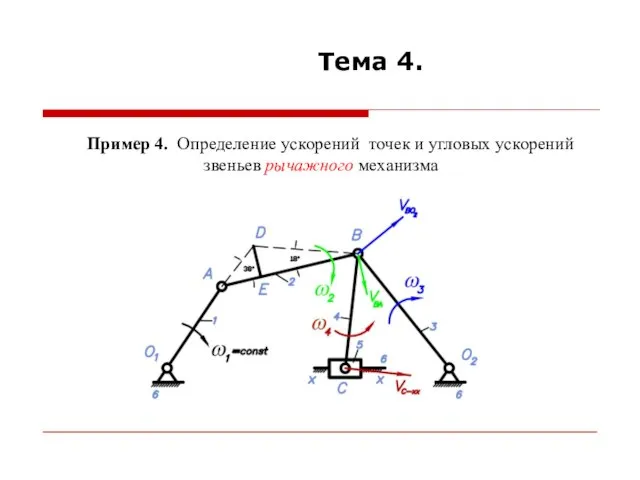
Пример 4. Определение ускорений точек и угловых ускорений звеньев рычажного механизма
Пример 4. Определение ускорений точек и угловых ускорений звеньев рычажного механизма
Тема 4.
Тема 4.
Тема 4.
Тема 4.
Тема 4.
Тема 4.
Тема 4.
Тема 4.
Тема 4.
Тема 4.
Тема 4
Тема 4

Тема 4.
Тема 4.

Тема 4.
Тема 4.
Тема 4.
Тема 4.
Тема 4.
Нахождение действительных значений абсолютных ускорений всех точек механизма
Тема 4.
Нахождение действительных значений абсолютных ускорений всех точек механизма
Тема 4.
Нахождение действительных значений относительных и тангенциальных ускорений точек механизма
Тема 4.
Нахождение действительных значений относительных и тангенциальных ускорений точек механизма
 Рентгеновские методы спектрального анализа ( основы методов )
Рентгеновские методы спектрального анализа ( основы методов ) Поражающее действие электрического тока. Лекция 1
Поражающее действие электрического тока. Лекция 1 Self-inductance
Self-inductance Движение - в самом общем виде- изменение вообще
Движение - в самом общем виде- изменение вообще Свойства твёрдых тел, жидкостей и газов
Свойства твёрдых тел, жидкостей и газов Структура енергетичних рівнів молекул
Структура енергетичних рівнів молекул Своя игра. Электризация
Своя игра. Электризация Оптика. Поляризация при двойном лучепреломлении
Оптика. Поляризация при двойном лучепреломлении Презентация по физике "Волновой источник тока" - скачать
Презентация по физике "Волновой источник тока" - скачать  Ядерные реакции
Ядерные реакции Микроскоп – знакомство, создание, опыты
Микроскоп – знакомство, создание, опыты Оптичні системи. Кут зору. Дисперсія, інтерференція, дифракція, поляризація світла
Оптичні системи. Кут зору. Дисперсія, інтерференція, дифракція, поляризація світла Основы кристаллографии. Дифракция рентгеновских лучей в кристаллах
Основы кристаллографии. Дифракция рентгеновских лучей в кристаллах Принципиальное устройство и работа двигателей внутреннего сгорания
Принципиальное устройство и работа двигателей внутреннего сгорания Оптические приборы. Глаз
Оптические приборы. Глаз Звук. Характеристики звука
Звук. Характеристики звука Тепловые балансы ВТУ, их разновидности. Тепловой баланс теплотехнологического реактора
Тепловые балансы ВТУ, их разновидности. Тепловой баланс теплотехнологического реактора Структурная схема механизма
Структурная схема механизма Электролиз.
Электролиз. Lake ice climatology
Lake ice climatology Система охлаждения двигателя
Система охлаждения двигателя Обувь - физика здоровья
Обувь - физика здоровья Нормирование электромагнитных излучений, методы контроля и средства защиты
Нормирование электромагнитных излучений, методы контроля и средства защиты Презентация по физике "Проводимость полупроводников" - скачать
Презентация по физике "Проводимость полупроводников" - скачать  Виды излучений. Источники света
Виды излучений. Источники света Капиллярные явления
Капиллярные явления Оптика. Электромагнитные волны
Оптика. Электромагнитные волны Выключатель ВМТ-110:
Выключатель ВМТ-110: