Поступательное движение твердого тела и вращательное движение твердого тела вокруг неподвижной оси. Геометрия масс
- Поступательное движение твердого тела и вращательное движение твердого тела вокруг неподвижной оси. Геометрия масс

Содержание
- 2. Момент инерции твердого тела Твердое тело можно представить как систему МТ, удерживаемых внутренними силами на неизменных
- 3. Вращение твердого тела вокруг неподвижной оси. Момент инерции Пусть частицы образуют твердое тело, способное вращаться вокруг
- 4. Момент импульса k-й частицы равен Lk = mkvkrk. Угловая скорость вращения тела ω связана с линейной
- 6. Эллипсоид инерции Рассмотрим систему материальных точек M1, M2, .... Мn и некоторую произвольную прямую OR. Пусть
- 7. Эллипсоид инерции – это поверхность, характеризующая распределение моментов инерции тела относительно пучка осей, проходящих через фиксированную
- 8. Оси, относительно которых центробежный момент инерции равен нулю, называют главными осями (иногда их называют главными осями
- 9. Проведем через. центр тяжести сечения ось Ох, перпендикулярную оси симметрии Оу, и определим центробежный момент инерции
- 10. Свойства главных осей инерции: Теорема 1: Если одна из декартовых осей является главной осью инерции, то
- 11. Передаточные механизмы Передаточные механизмы приводов роботов служат связующими звеньями между двигателями и исполнительными органами и предназначены
- 12. Важнейшей характеристикой передаточного механизма является его передаточное отношение, исчисляемое как отношение скоростей движения ведущего звена (вала,
- 14. Скачать презентацию
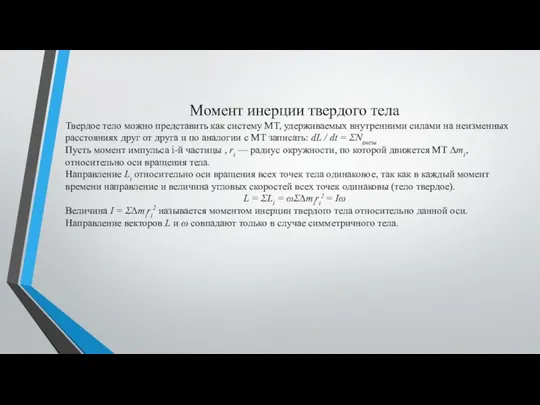
Момент инерции твердого тела
Твердое тело можно представить как систему МТ, удерживаемых
Момент инерции твердого тела
Твердое тело можно представить как систему МТ, удерживаемых
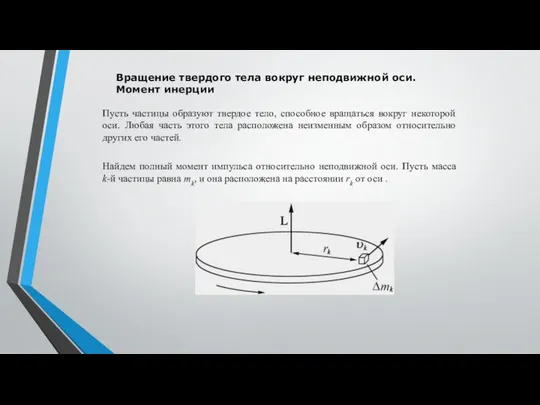
Вращение твердого тела вокруг неподвижной оси. Момент инерции
Пусть частицы образуют
Вращение твердого тела вокруг неподвижной оси. Момент инерции
Пусть частицы образуют
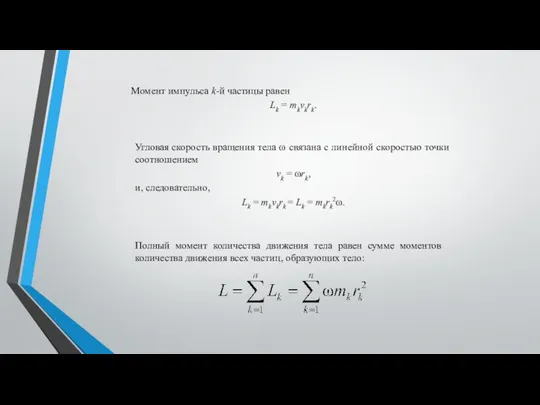
Момент импульса k-й частицы равен
Lk = mkvkrk.
Угловая скорость вращения тела ω
Момент импульса k-й частицы равен
Lk = mkvkrk.
Угловая скорость вращения тела ω
Эллипсоид инерции
Рассмотрим систему материальных точек M1, M2, .... Мn и некоторую
Эллипсоид инерции
Рассмотрим систему материальных точек M1, M2, .... Мn и некоторую
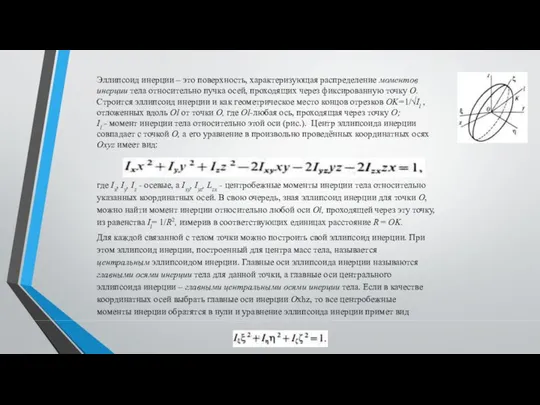
Эллипсоид инерции – это поверхность, характеризующая распределение моментов инерции тела относительно пучка осей, проходящих через
Эллипсоид инерции – это поверхность, характеризующая распределение моментов инерции тела относительно пучка осей, проходящих через
Оси, относительно которых центробежный момент инерции равен нулю, называют главными осями
Оси, относительно которых центробежный момент инерции равен нулю, называют главными осями
Проведем через. центр тяжести сечения ось Ох, перпендикулярную оси симметрии Оу,
Проведем через. центр тяжести сечения ось Ох, перпендикулярную оси симметрии Оу,
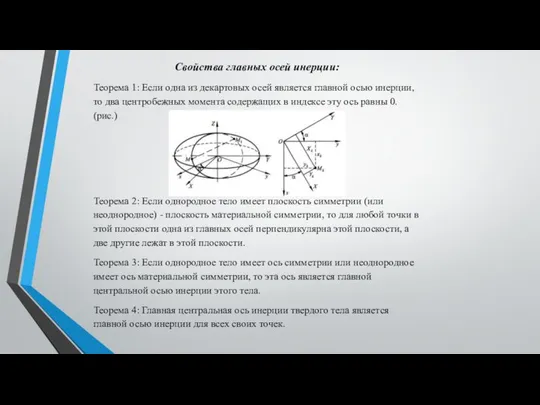
Свойства главных осей инерции:
Теорема 1: Если одна из декартовых осей является
Свойства главных осей инерции:
Теорема 1: Если одна из декартовых осей является
Передаточные механизмы
Передаточные механизмы приводов роботов служат связующими звеньями между двигателями и
Передаточные механизмы
Передаточные механизмы приводов роботов служат связующими звеньями между двигателями и
Важнейшей характеристикой передаточного механизма является его передаточное отношение, исчисляемое как отношение
Важнейшей характеристикой передаточного механизма является его передаточное отношение, исчисляемое как отношение
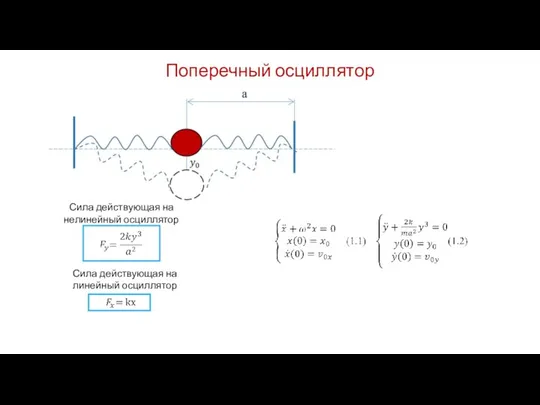 Поперечный осциллятор
Поперечный осциллятор Приложение к вопросу 02: вывод формулы Резерфорда
Приложение к вопросу 02: вывод формулы Резерфорда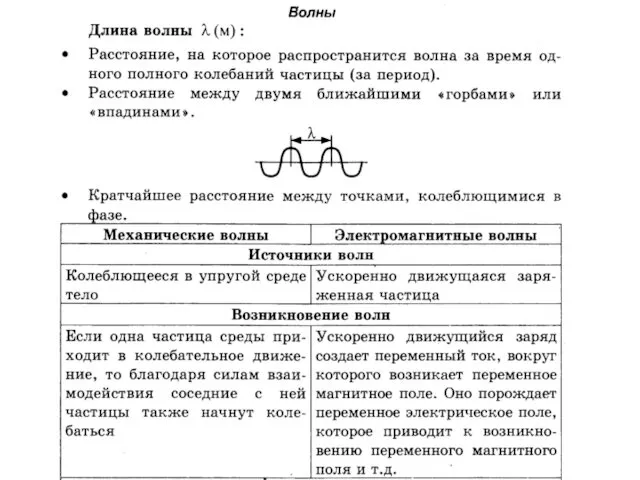 Волны. Виды волн
Волны. Виды волн Теория электромагнитного поля
Теория электромагнитного поля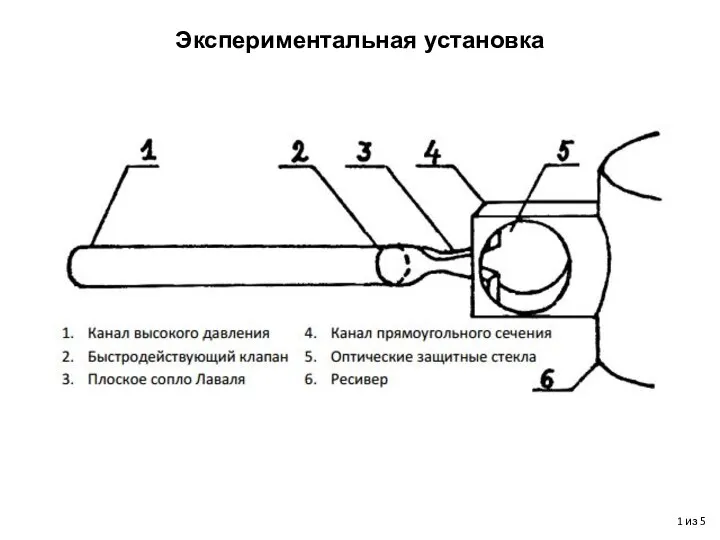 Экспериментальная установка. Метод интерферометра
Экспериментальная установка. Метод интерферометра Устройство увеличительных приборов
Устройство увеличительных приборов Даими магнитларның магнит кыры. дайм Жирнең магнит кыры
Даими магнитларның магнит кыры. дайм Жирнең магнит кыры Поисково-исследовательский метод используемый на уроках физики
Поисково-исследовательский метод используемый на уроках физики Пароутворення та конденсація Підготувала Учениця 10-Б класу ЗОШ І-ІІІ ст. №11 м. Сміла Відняк Людмила
Пароутворення та конденсація Підготувала Учениця 10-Б класу ЗОШ І-ІІІ ст. №11 м. Сміла Відняк Людмила  Дисперсия света
Дисперсия света Радиационная защита
Радиационная защита Измерения температуры
Измерения температуры Свободные колебания системы с бесконечным числом степеней свободы
Свободные колебания системы с бесконечным числом степеней свободы Виды газовых разрядов и их применение
Виды газовых разрядов и их применение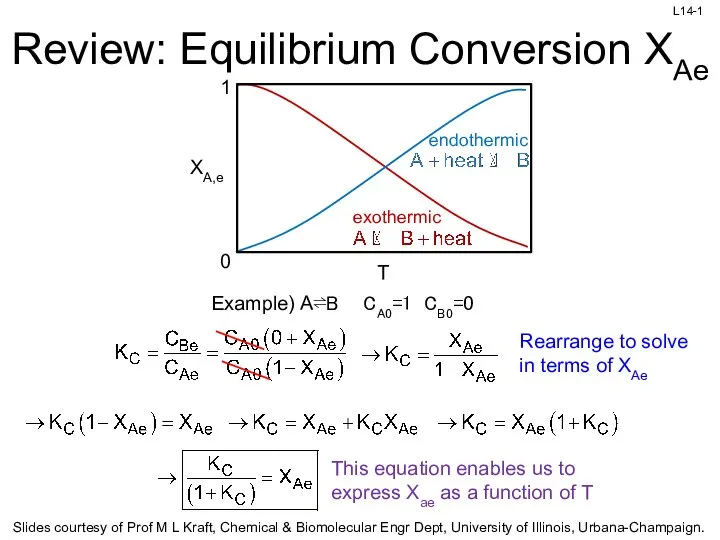 Review: Equilibrium Conversion XAe
Review: Equilibrium Conversion XAe Понятие давления
Понятие давления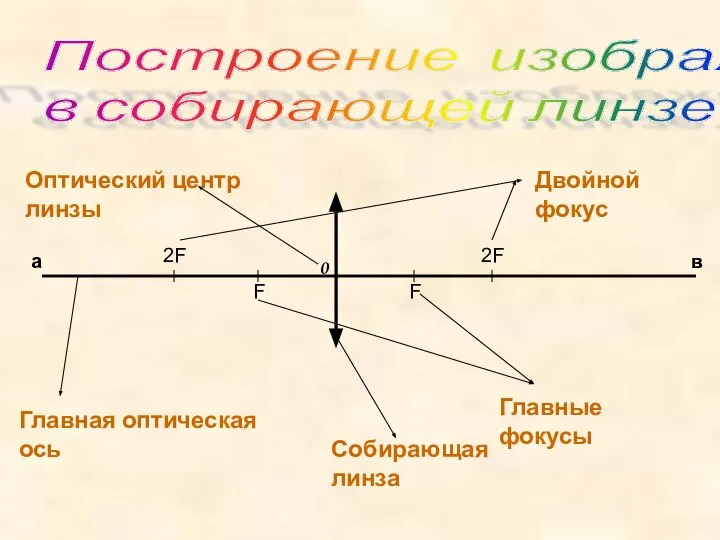 Презентация по физике "Построение изображений в собирающей линзе" - скачать
Презентация по физике "Построение изображений в собирающей линзе" - скачать  Плоские волны
Плоские волны Способы описания движения. Система отсчёта
Способы описания движения. Система отсчёта ЕГЭ 15 без оптики. Формулы. Задание 15
ЕГЭ 15 без оптики. Формулы. Задание 15 Линии влияния. Лекция 1. Расчёт сооружений на действие подвижных и других временных нагрузок
Линии влияния. Лекция 1. Расчёт сооружений на действие подвижных и других временных нагрузок Деформация поликристаллов
Деформация поликристаллов Сила тока
Сила тока Презентация Равномерное и равноускоренное движение
Презентация Равномерное и равноускоренное движение Своя игра. Механика
Своя игра. Механика Машина переменного тока. Лекция 15
Машина переменного тока. Лекция 15 Свинцово-кислотные аккумуляторы
Свинцово-кислотные аккумуляторы Презентация по физике "Розвиток ядерної Енергетики в Україні" - скачать бесплатно
Презентация по физике "Розвиток ядерної Енергетики в Україні" - скачать бесплатно