- Принцип относительности в классической механике. Преобразования Галилея. Силы инерции

Содержание
- 2. 200 ВОПРОСЫ 11. Принцип относительности в механике. Инерциальные системы отсчёта. Преобразования Галилея. 12. Неинерциальные системы отсчёта.
- 3. 200 Вопрос № 11. Принцип относительности в механике. Преобразования Галилея. Инерциальные системы отсчёта.
- 4. 200 Инерциальные системы Рассмотрим две системы отсчёта, одна покоится (K), другая (K/) движется относительно другой со
- 5. 200
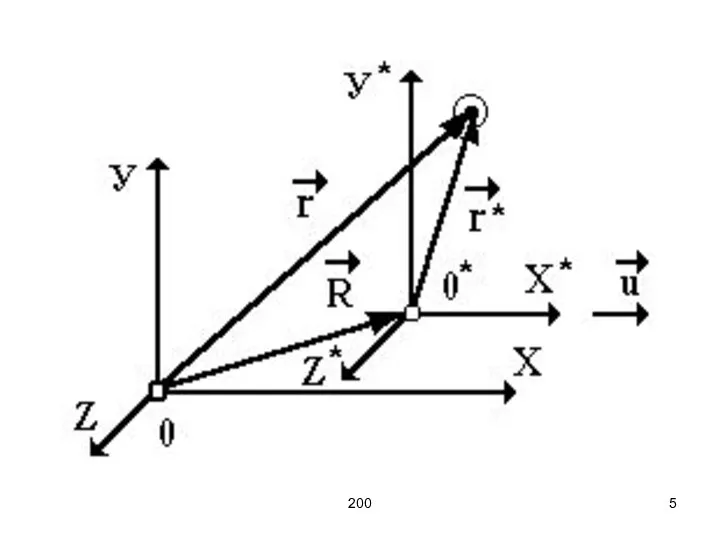
- 6. 200 Запишем связь между координатами (x, y, z) и (x/, y/, z/) точки «P» в системах
- 7. 200 Получаем четыре уравнения это преобразование Галилея, используем его если V0
- 8. 200 Дифференцируем по времени:
- 9. 200 Или в следующем виде (напоминаем, что только для выбранной схемы, рисунка)
- 10. 200 Перейдём к векторам Дифференцируем или для уравнения движения
- 11. 200 Уравнения динамики не изменяются при переходе от одной инерциальной системы отсчёта к другой, то есть
- 12. 200 Итак, все инерциальные системы отсчёта инвариантны: Уравнения движения выглядят одинаково (дифференциальные уравнения), но движения разные,
- 13. 200
- 14. 200 12. Неинерциальные системы отсчёта. Сила инерции.
- 15. 200 Неинерциальные системы Рассмотрим две системы отсчёта, одна инерциальная, вторая – неинерциальная, Имеется некоторое тело, которое
- 16. 200 Разность ускорений тела в инерциальной и неинерциальной системах отсчёта (для поступательного движения) a – одинаково
- 17. 200 Через 2-й закон Ньютона представим ускорения. Инерциальная система: Неинерциальная система: m – масса тела.
- 18. 200 Отсюда, при F = 0 тело будет двигаться, в неинерциальной системе отсчёта с ускорением –a,
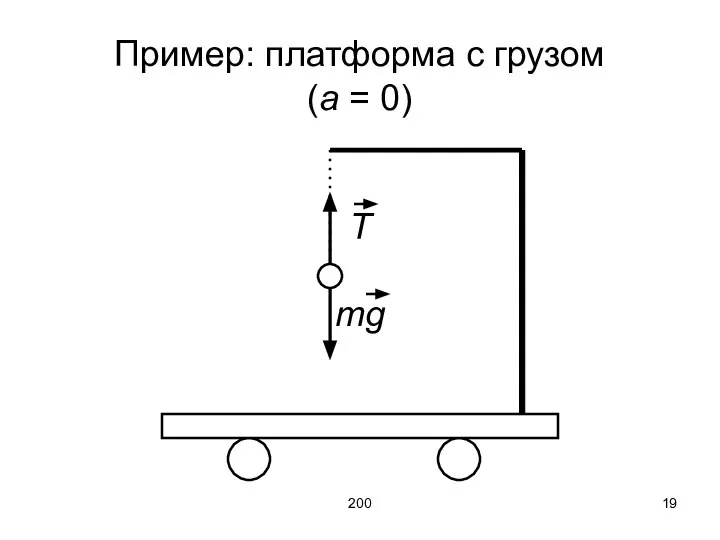
- 19. 200 Пример: платформа с грузом (a = 0) T mg
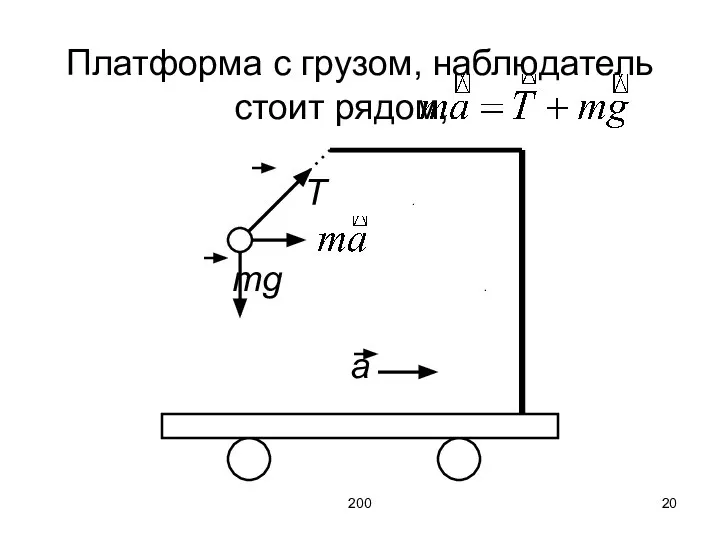
- 20. 200 Платформа с грузом, наблюдатель стоит рядом, T . mg . a
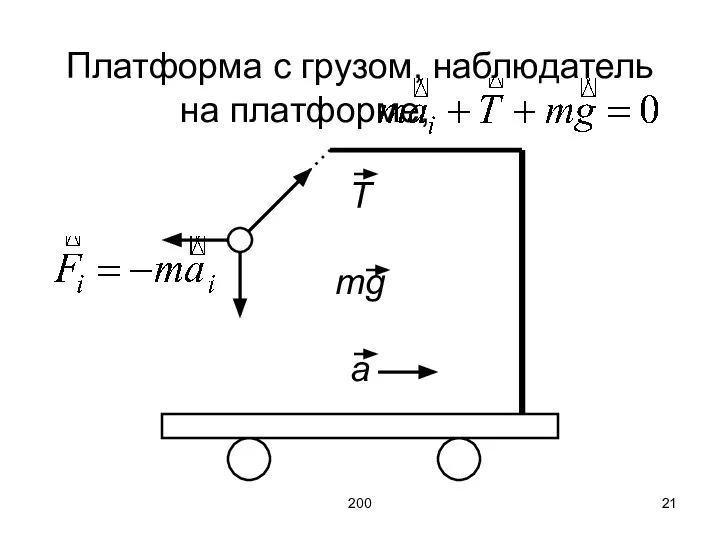
- 21. 200 Платформа с грузом, наблюдатель на платформе, T mg a
- 22. 200 Все силы в физике обусловлены взаимодействием тел, то есть одно тело действует на другое, и
- 23. 200
- 24. 200 13. Силы инерции во вращающихся неинерциальных системах и системах. Принцип эквивалентности масс.
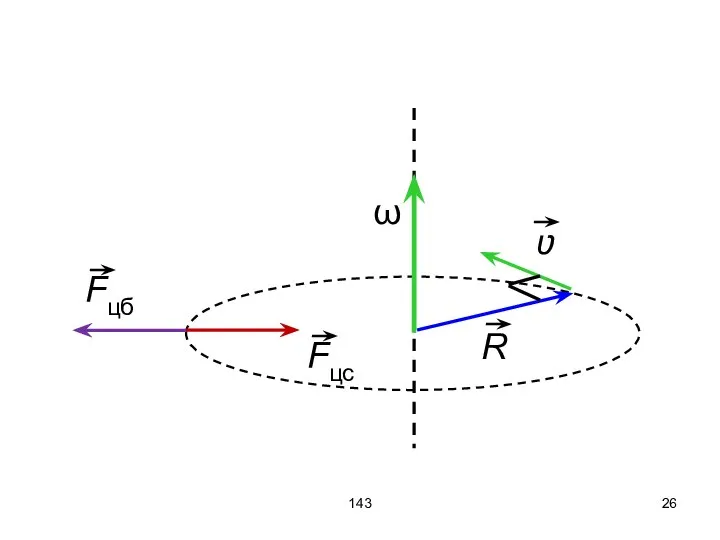
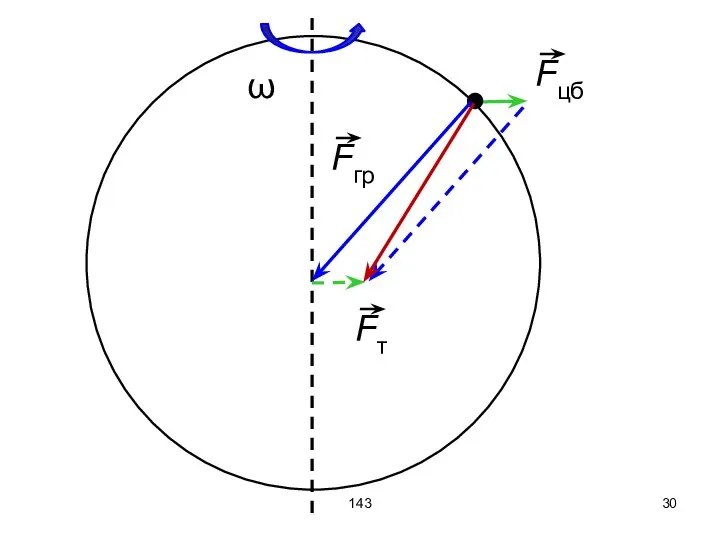
- 25. 200 Рассмотрим движение тела по окружности. В инерциальной системе тело удерживается на окружности центростремительной силой. В
- 26. 143
- 27. 200 Если наблюдать из инерционной системы отсчёта (наблюдатель находится рядом, не двигается), то необходимо использовать силу
- 28. 200 Если наблюдать из неинерционной системы отсчёта (наблюдатель двигается по окружности радиусом R с угловой скоростью
- 29. 200 Влияние центробежной силы на силу тяжести. Сила гравитационного взаимодействия притягивает тела на поверхности Земли к
- 30. 143
- 31. 200 Центробежная сила на экваторе за счёт вращения Земли вокруг своей оси: aцб = 3,4 см/с2.
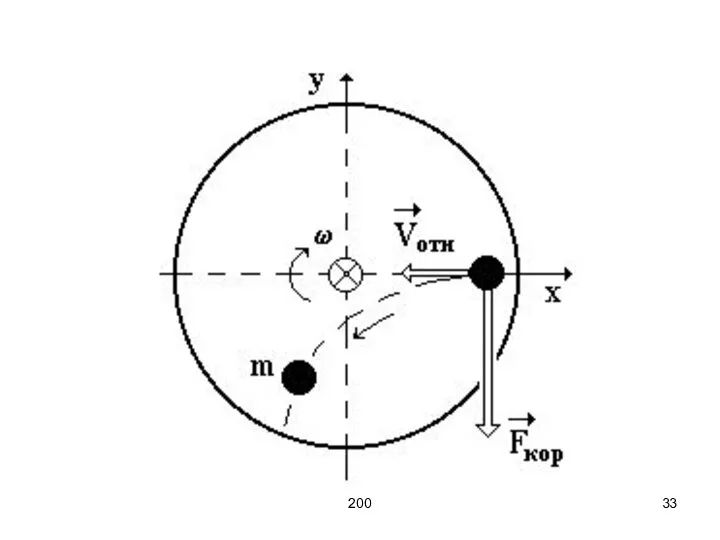
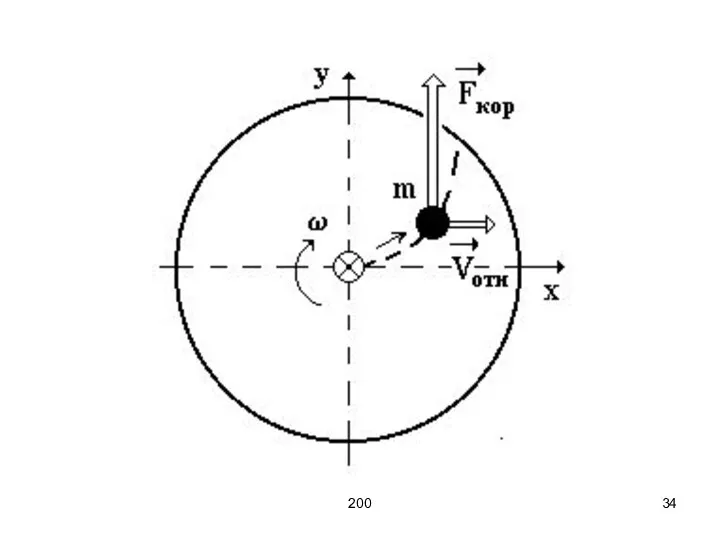
- 32. 200 При движении тела относительно вращающейся системы отсчёта, кроме центробежной силы инерции, появляется ещё одна сила,
- 33. 200
- 34. 200
- 35. 200 Если ʋотн II ω и ʋотн ן R: Fк = 0. При движении параллельно оси
- 36. 200 Принцип эквивалентности масс. Все физические явления в гравитационном поле происходят совершенно так же, как и
- 37. 200 (Или) масса гравитационная равняется массе инерционной
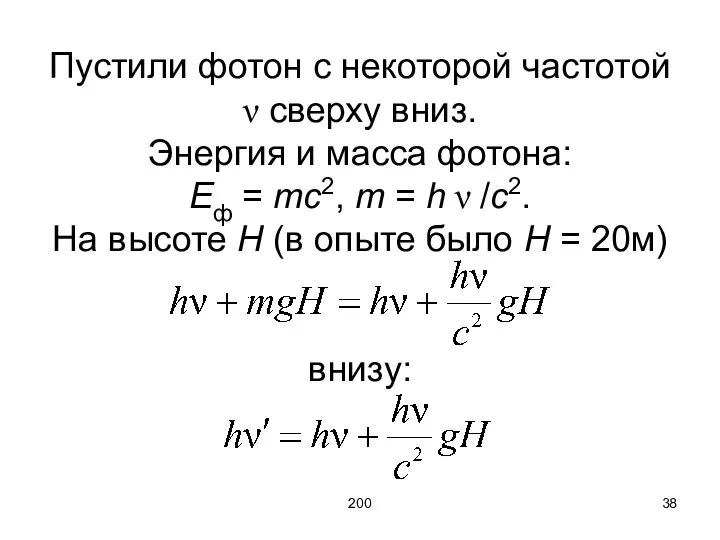
- 38. 200 Пустили фотон с некоторой частотой ν сверху вниз. Энергия и масса фотона: Eф = mc2,
- 39. 200 Изменение частоты: что и было зафиксировано. Точность измерений была:
- 40. 200
- 41. 200 ЛЕКЦИЯ № 5 Элементы релятивистской механики
- 42. 200 ВОПРОСЫ 14. Предпосылки появления специальной теории относительности (СТО). 15. Преобразования Лоренца. Следствия из преобразований Лоренца.
- 43. 200 14. Предпосылки появления специальной теории относительности (СТО).
- 44. 200 Классическая физика рассматривает движение макротел с медленными скоростями. Описание взаимодействия тел с помощью потенциальной энергии
- 45. 200 Однако это противоречит экспериментальным данным, которые появились к концу XIX века. По Эйнштейну существует максимальная
- 46. 200 В связи с механическим принципом относительности Галилея возникает вопрос: равноправны ли все инерциальные системы отсчета
- 47. 200 Как показал, Эйнштейн принцип относительности распространяется на любые физические явления, а не только механические.
- 48. 200 Позднее им была создана специальная теория относительности (СТО) для движения тел и частиц со скоростями
- 49. 200 Позднее Эйнштейн создал общую теорию относительности (1916г.), которая учитывает большие гравитационные поля. Но рассмотрим только
- 50. 200 1-й постулат (релятивистский принцип относительности): в любых инерциальных системах отсчета все физические явления при одних
- 51. 200 Следовательно, все физические законы инвариантны (независимы) по отношению к выбору инерциальной системы отсчета.
- 52. 200 2-й постулат (принцип инвариантности скорости света в вакууме): Скорость света в вакууме не зависит от
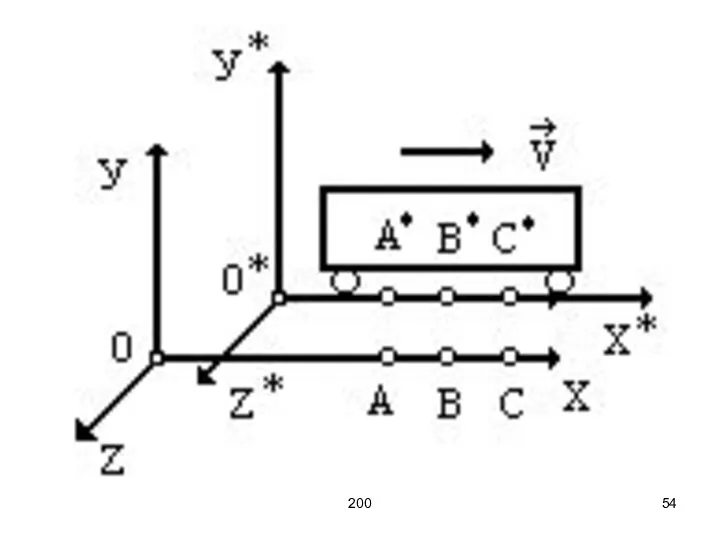
- 53. 200 Эти принципы приводят к тому, что события одновременные в классической механике в релятивистской становятся относительными.
- 54. 200
- 55. 200 Для вагона точки обозначим через А*, С* и В*, причем А*В*= В*С*. В тот момент,
- 56. 200 Наблюдатель же в точке В*, движущийся в направлении точки С*, заметит вначале вспышку, произведенную в
- 57. 200 Наблюдатель на Земле, находясь в точке В увидит два пространственно разделенных события, произошедшие одновременно, тогда
- 58. 200 Следовательно, понятие одновременности относительно, т. е. два пространственно разделенных события, одновременные в одной ИСО не
- 59. 200 Это относится лишь к событиям, между которыми отсутствуют причинно-следственная связь. Причинно связанные события ни в
- 60. 200
- 61. 200 15. Преобразования Лоренца. Следствия из преобразований Лоренца: сокращение длины движущихся тел и замедление темпа хода
- 62. 200 Для описания движения в СТО используют преобразования Лоренца, позволяющие переходить от координат одной инерциальной системы
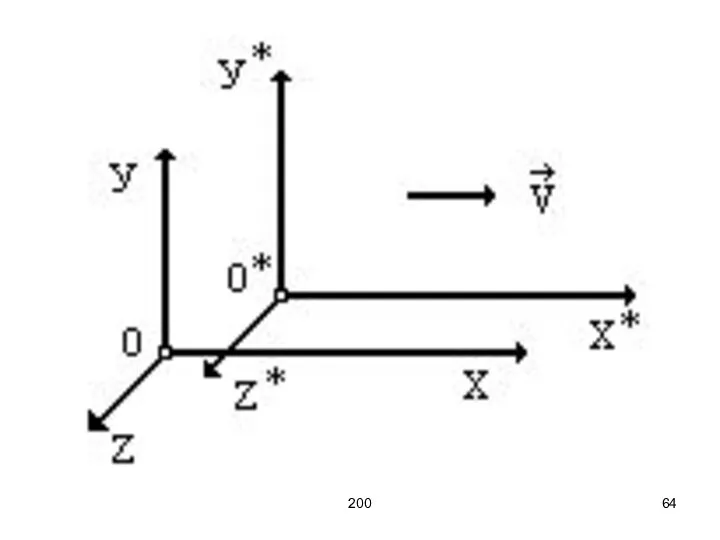
- 63. 200 Преобразования Лоренца имеют наиболее простой вид в случае, когда сходственные оси декартовых координат неподвижной К
- 64. 200
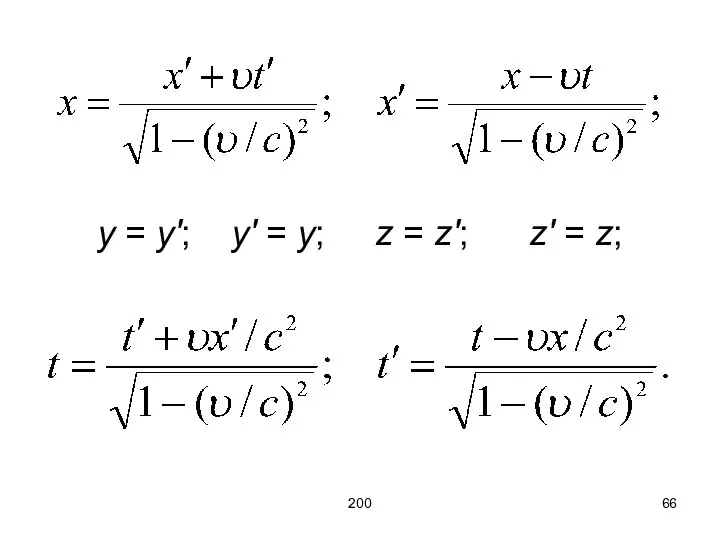
- 65. 200 Начало отсчета времени выбирается в тот момент, когда координаты начала 0 и 0' обеих инерциальных
- 66. 200 y = y′; y′ = y; z = z′; z′ = z;
- 67. 200 Следствия преобразований Лоренца. Одновременность событий в разных системах отсчёта. В системе К в точках x1
- 68. 200 Но в системе К′ эти события произойдут моменты времени: Но если события причинно связанные, ни
- 69. 200 Промежуток времени между событиями. Существуют события, вызванные причинно-следственной связью. Например, чтобы камень упал в воду,
- 70. 200 Бросок является причиной, а падение камня в воду – следствием. 1) сначала происходит событие, являющееся
- 71. 200 В связи с этим в СТО, хотя время и преобразуется, но последовательность во времени между
- 72. 200 Тогда скорость пули Используя преобразования Лоренца найдем промежуток времени между этими же событиями в ИСО
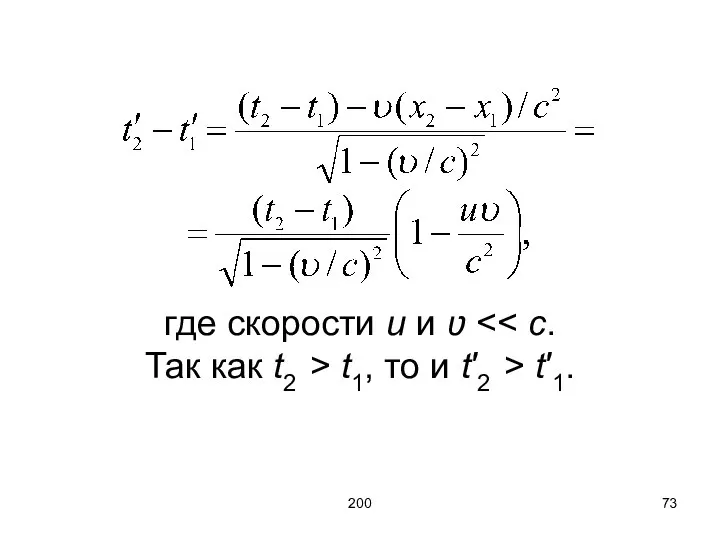
- 73. 200 где скорости u и ʋ t1, то и t′2 > t′1.
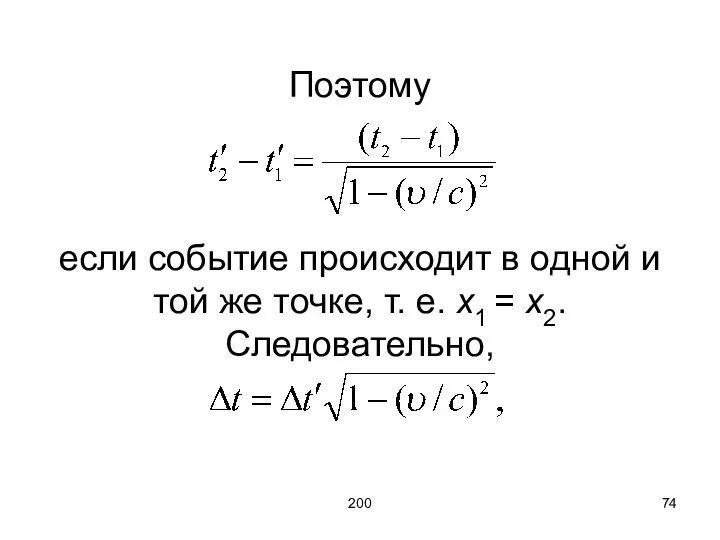
- 74. 200 Поэтому если событие происходит в одной и той же точке, т. е. х1 = х2.
- 75. 200 т. е. промежуток времени между двумя событиями имеет меньшее значение в ИСО, связанной с точкой,
- 76. 200 Промежуток времени Δt – собственное время тела, в системе, где тело покоится. Собственное время всегда
- 77. 200 Эксперименты подтвердили полученный результат. Например, время жизни покоящихся мюонов τ ≈ 2 мкс. Мюоны же
- 78. 200 Длина тел в разных системах. Длина стержня в ИСО равна разности координат его концов. Например,
- 79. 200 Однако результат изменяется, когда наблюдатель и стержень движутся относительно друг друга. Понятие одновременности относительно и
- 80. 200 Для вычисления длины стержня используют преобразования Лоренца. Например, пусть некоторый стержень расположен параллельно оси Х
- 81. 200 В ИСО К′, движущейся относительно ИСО К равномерно и прямолинейно со скоростью ʋ = const
- 82. 200 Используя преобразования Лоренца, имеем то есть
- 83. 200 Если координаты концов отрезка в ИСО К′ измерены одновременно (так как t′2 = t′1.), то
- 84. 200 Следовательно, длина отрезка в любой ИСО, относительно которой он движется, меньше длины отрезка в неподвижной
- 85. 200
- 86. 200 16. Закон сложения скоростей в СТО. Релятивистский импульс. Энергия релятивистской частицы. Инварианты преобразования Лоренца. Интервал.
- 87. 200 Интервал Любые события характеризуются точкой, где оно произошло, имеющей координаты х, у, z и временем
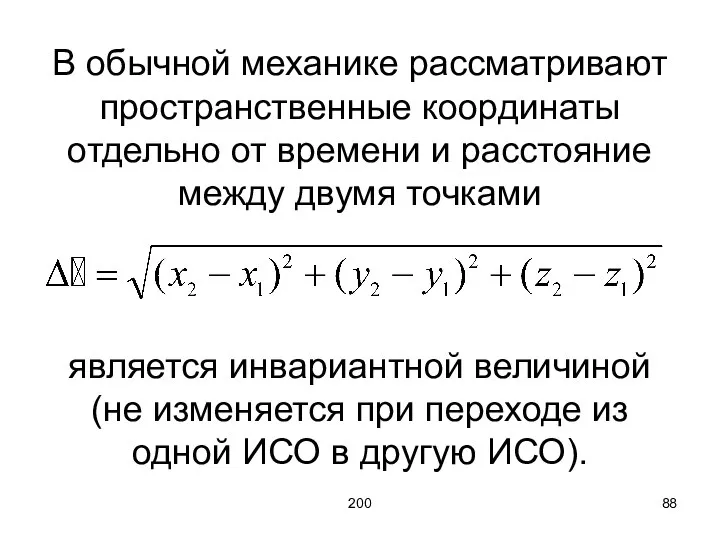
- 88. 200 В обычной механике рассматривают пространственные координаты отдельно от времени и расстояние между двумя точками является
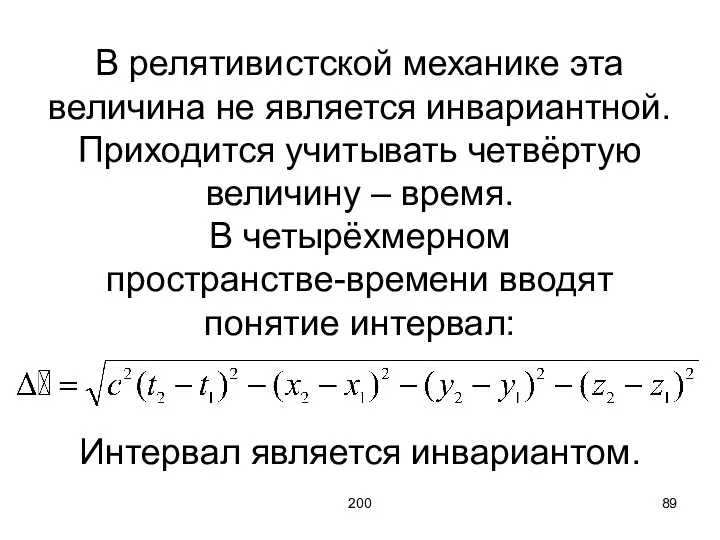
- 89. 200 В релятивистской механике эта величина не является инвариантной. Приходится учитывать четвёртую величину – время. В
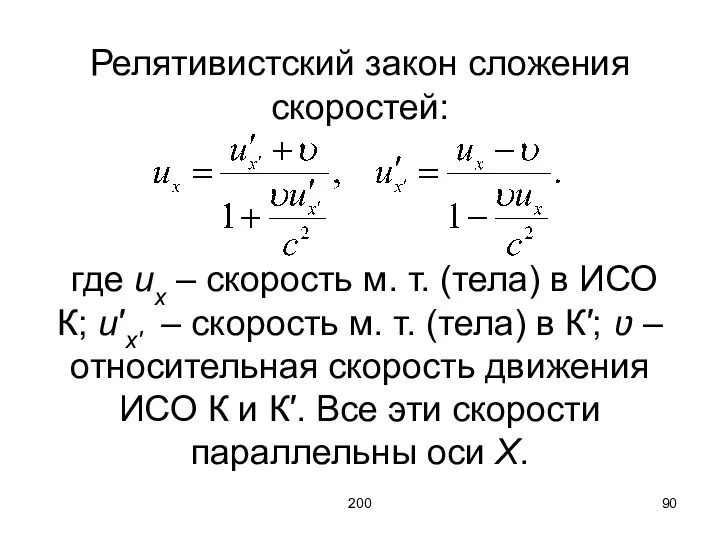
- 90. 200 Релятивистский закон сложения скоростей: где ux – скорость м. т. (тела) в ИСО К; u′x′
- 91. 200 Для скоростей параллельных осям Y и Z:
- 92. 200 Релятивистский импульс в виде обеспечивает инвариантность закона сохранения импульса по отношению к преобразованиям Лоренца,
- 93. 200 здесь dr – перемещение частицы (материальной точки) в той ИСО, в которой определяется её импульс;
- 94. 200 Так как, то где
- 95. 200 Следовательно, релятивистский импульс частицы
- 96. 200 Уравнение динамики
- 97. 200 Энергия Энергия покоя E0 = m0c2, Энергия релятивистской частицы m0 – масса покоя.
- 98. 200 Кинетическая энергия релятивистской частицы
- 99. 200 Полная энергия
- 100. 200 Инварианта энергии и импульса Величина E/c, px, py, pz образует четырёхвектор (вектор энергии-импульса).
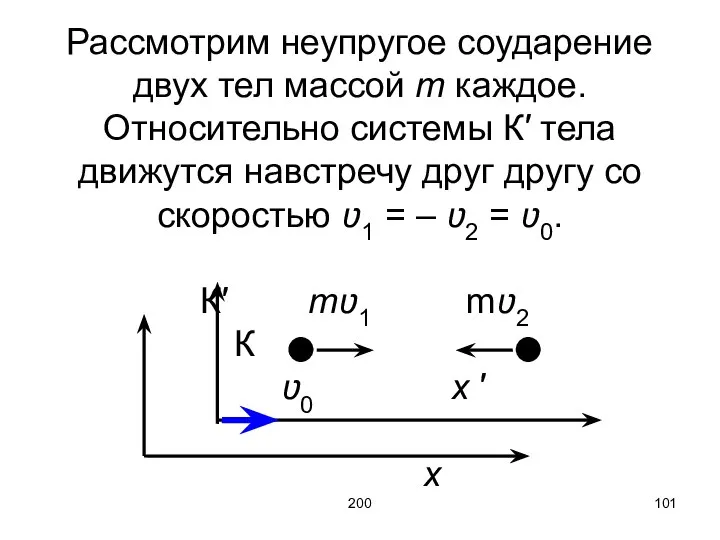
- 101. 200 Рассмотрим неупругое соударение двух тел массой m каждое. Относительно системы К′ тела движутся навстречу друг
- 102. 200 Система К′ движется относительно системы К со скоростью ʋ0. В системе К′ В системе К
- 103. 200 Согласно переходу импульс до удара будет
- 104. 200 Или заменяя скорость ʋ1 на ʋ0:
- 105. 200 Но должно быть
- 106. 200 Такой результат получили, так как не учли массу системы
- 107. 200 Это обусловлено тем, что кинетическая энергия частиц превратилась в эквивалентное количество энергии покоя, а это
- 108. 200
- 109. 200 ЛЕКЦИЯ № 6 Элементы механики твёрдого тела.
- 110. 200 ВОПРОСЫ 17. Условия равновесия твёрдого тела. Мгновенная ось вращения. 18. Кинетическая энергия вращающегося твёрдого тела.
- 111. 200 19. Основной закон динамики вращательного движения твёрдого тела. Момент инерции, его свойства. Теорема Штейнера (теорема
- 112. 200 17. Условия равновесия твёрдого тела. Мгновенная ось вращения.
- 113. 200 В случае описания положения и/или движения материальной точки достаточно 3-х степеней свободы. Степень свободы –
- 114. 200 Для абсолютно твёрдого тела (тело, деформациями которого можно пренебречь) необходимо 6 степеней свободы: 3 –
- 115. 200 Уравнение динамики движения центра масс Уравнение динамики вращательного движения
- 116. 200 Если Fвнеш и Mвнеш равны нулю, то тело будет находиться в равновесии. Условия равновесия твёрдого
- 117. 200 Не всегда можно пользоваться моделью абсолютно твёрдого тела. Пример: рассмотрим балку на 3-х опорах. Для
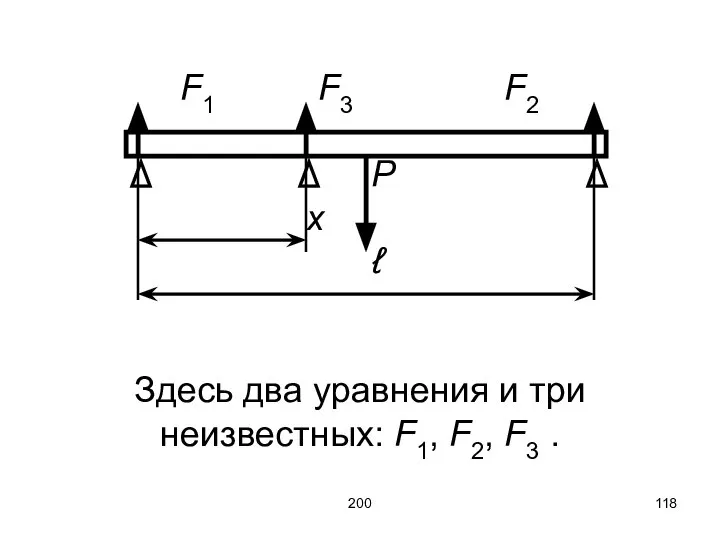
- 118. 200 F1 F3 F2 P x ℓ Здесь два уравнения и три неизвестных: F1, F2, F3
- 119. 200 Данная задача оказалась неопределённой, решить её можно, если придать одной из сил произвольное значение. Механические
- 120. 200 Физики про себя шутят: если им дать задачу о равновесии стола на 4 ножках, то
- 121. 200 Любое движение твёрдого тела может быть представлено как наложение двух типов движения: поступательного и вращательного;
- 122. 200 Элементарное перемещение твёрдого тела при плоском движении всегда можно представить как поворот вокруг некоторой оси,
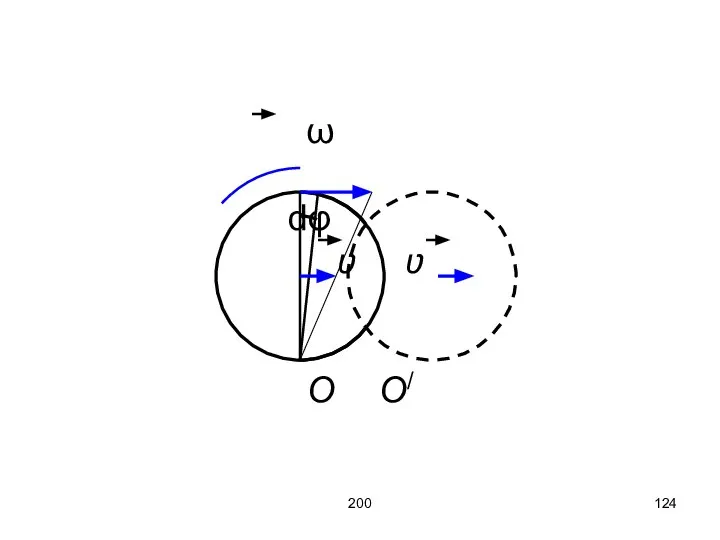
- 123. 200 Пример: катящийся цилиндр. Плоское движение твёрдого тела можно рассматривать как ряд последовательных элементарных вращений вокруг
- 124. 200 ω dφ ʋ ʋ O O/
- 125. 200
- 126. 200 18. Кинетическая энергия вращающегося твёрдого тела. Работа момента силы.
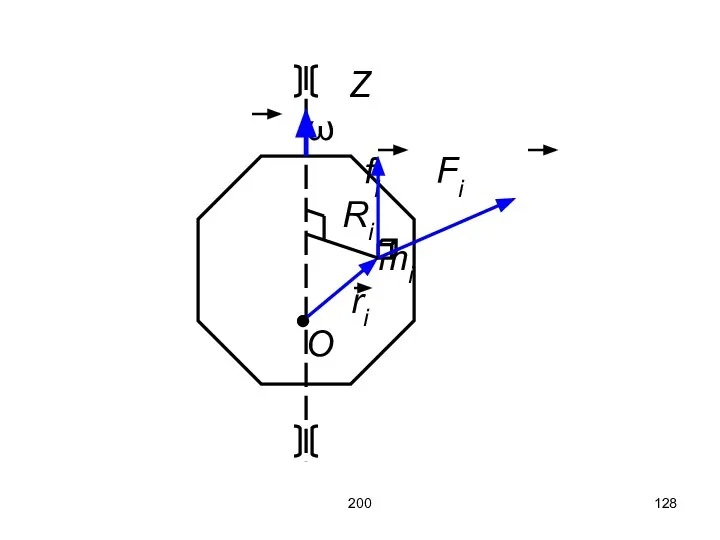
- 127. 200 Получим выражение для кинетической энергии вращающегося тела. Рассмотрим вращение тела вокруг неподвижной оси Z. Линейная
- 128. 200 Z ω fi Fi Ri mi ri O
- 129. 200 Кинетическая энергия элементарной массы mi: Кинетическая энергия всего тела:
- 130. 200 Рассмотрим силы, действующие на элементарную массу mi: внешние Fi, внутренние fi (эти силы перпендикулярны оси
- 131. 200 С другой стороны, работа внешних сил идёт на приращение кинетической энергии вращения:
- 132. 200 Так, мяч или обруч, брошенный горизонтально без вращения, раскрутится. Кинетическая энергия вращения получится за счёт
- 133. 200 И наоборот, раскрученный обруч, опущенный на горизонтальную опору, приобретёт горизонтальную скорость за счёт работы силы
- 134. 200 Теперь вычислим кинетическую энергию, поступательную и вращательную при плоском движении. Скорость i-й элементарной массы ʋ0
- 135. 200 Получим выражение для кинетической энергии твёрдого тела:
- 136. 200 Отметим следующее: Ri – расстояние от точки с массой mi до оси вращения. Запишем кинетическую
- 137. 200 здесь Σmi = m – масса всего тела, если в качестве точки О взять центр
- 138. 200 В итоге получили выражение кинетической энергии поступательного и вращательного движения (ось вращения проходит через центр
- 139. 200
- 140. 200 19. Основной закон динамики вращательного движения твёрдого тела. Момент инерции, его свойства. Теорема Штейнера (теорема
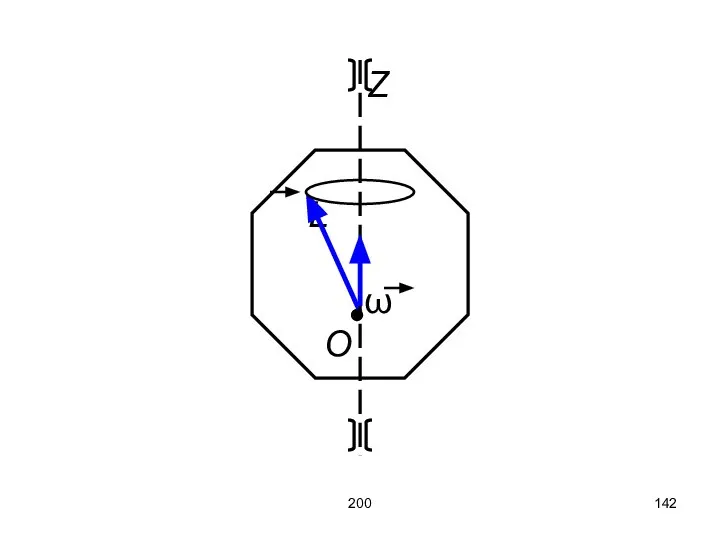
- 141. 200 Рассмотрим вращение тела вокруг неподвижной оси В общем случае вектор L не совпадает по направлению
- 142. 200 Z L ω O
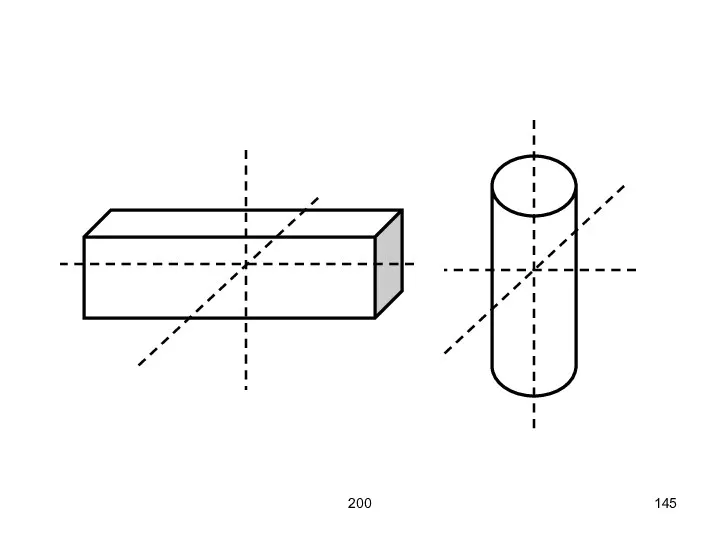
- 143. 200 В случае однородного тела, симметричного относительного оси вращения, момент импульса относительно точки O, лежащей на
- 144. 200 Момент инерции зависит от выбора оси. Свободная ось – ось, положение которой в пространстве остаётся
- 145. 200
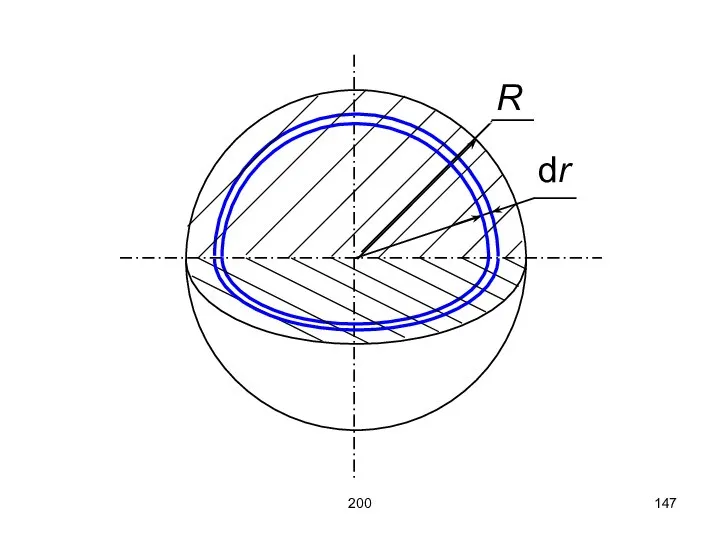
- 146. 200 Вычислим момент инерции однородного шара. Разобьём его на бесконечно тонкие сферические слои толщиной dr. Масса
- 147. 200
- 148. 200 Момент инерции шара складывается из моментов инерции сферических слоёв:
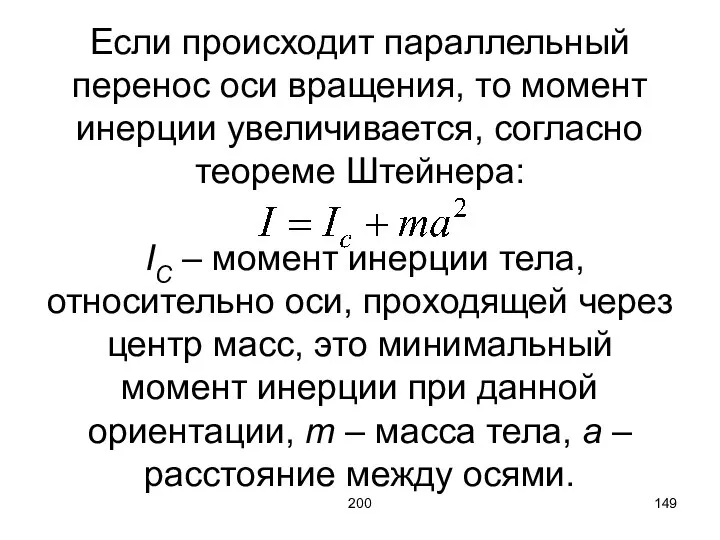
- 149. 200 Если происходит параллельный перенос оси вращения, то момент инерции увеличивается, согласно теореме Штейнера: IC –
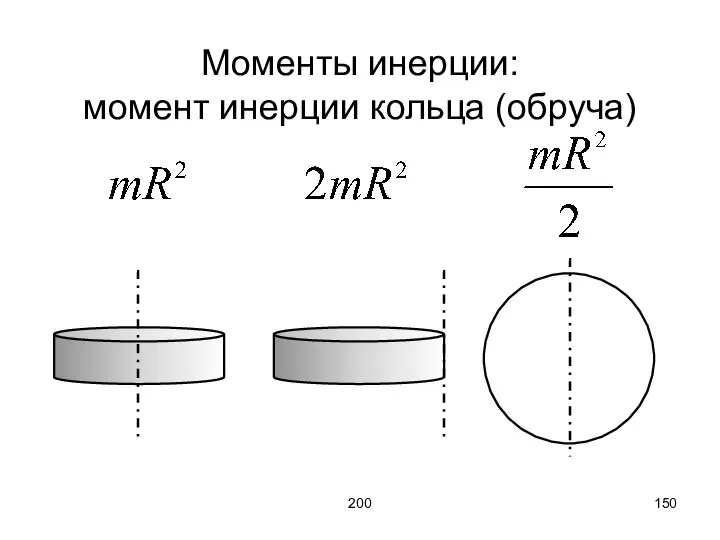
- 150. 200 Моменты инерции: момент инерции кольца (обруча)
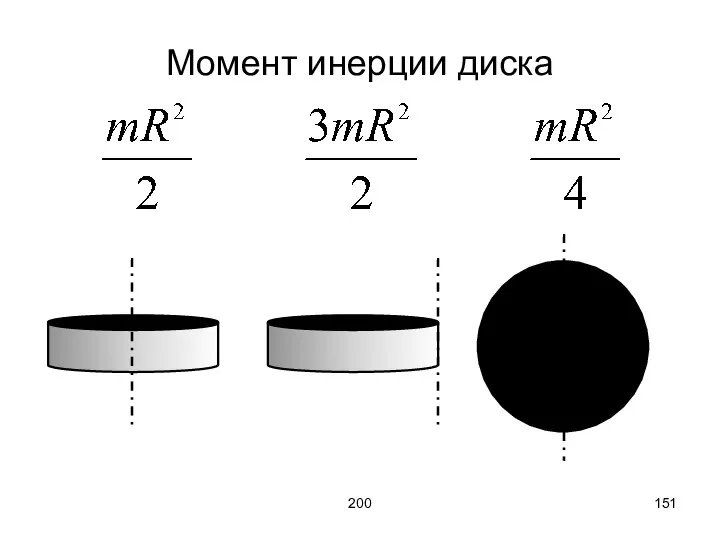
- 151. 200 Момент инерции диска
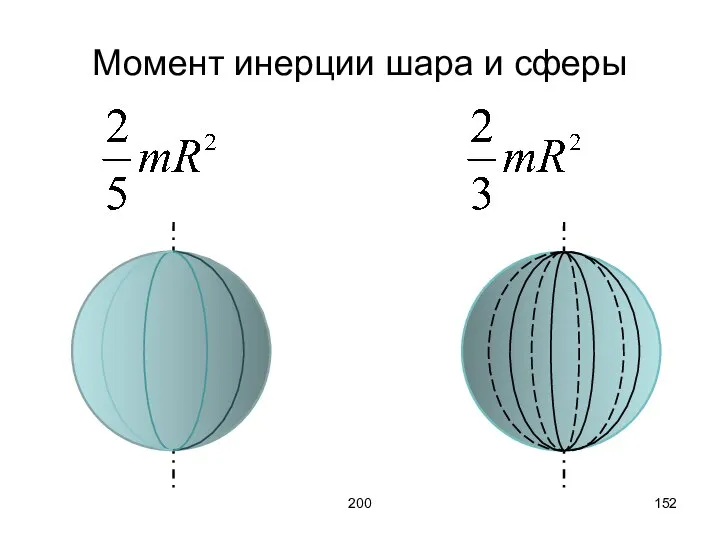
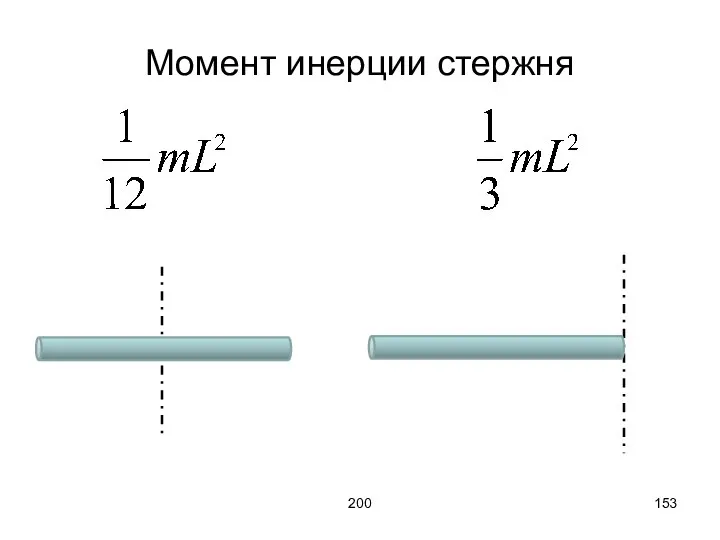
- 152. 200 Момент инерции шара и сферы
- 153. 200 Момент инерции стержня
- 154. 200
- 155. 200 20. Закон сохранения момента импульса изолированной системы. Изотропность пространства и закон сохранения момента импульса. Гироскоп.
- 156. 143 Из основного уравнения динамики вращательного движения Можно получить закон сохранения момента импульса (аналогично закону сохранения
- 157. 143 Пространство однородно, следовательно, параллельный перенос системы из одного места в другое не изменяет свойств системы
- 158. 143 Пространство изотропно, следовательно, поворот замкнутой системы как целого не отражается на её механических свойствах –
- 159. 200 Как правило, момент инерции не изменяется (I = const), следовательно, в силу закона сохранения импульса
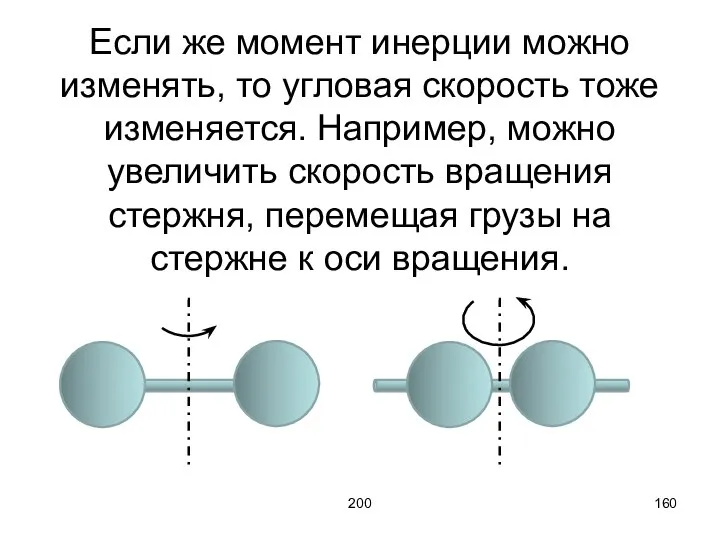
- 160. 200 Если же момент инерции можно изменять, то угловая скорость тоже изменяется. Например, можно увеличить скорость
- 161. 200 Гироскоп (волчок) – массивное симметричное тело, вращающееся с большой скоростью вокруг оси симметрии (ось гироскопа).
- 162. 200 dL F1 L/ L dφ M F2 Z Y X
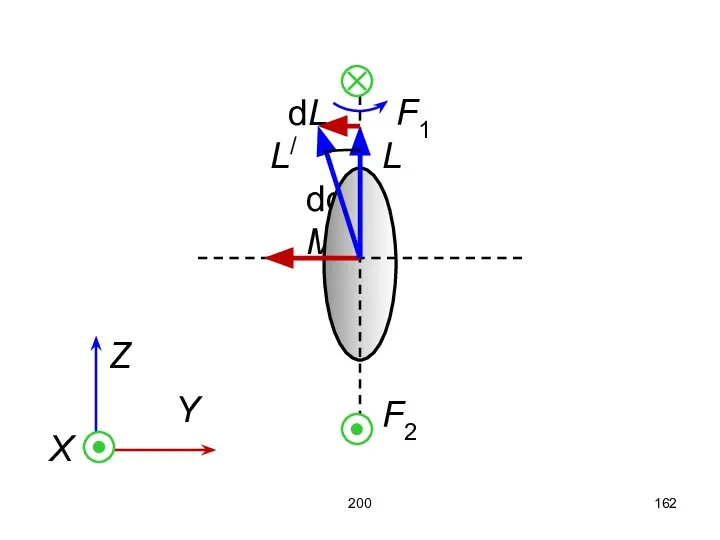
- 163. 200 Пара сил F1 и F2 (F1 = F2) перпендикулярны плоскости рисунка (ось X), пытаются повернуть
- 164. 200 Поскольку момент импульса L был направлен вертикально вверх (ось Z), а его приращение направлено влево,
- 165. 200 В самом деле
- 166. 200 Угол поворота и угловая скорость поворота оси вращения:
- 167. 200 Момент силы, вызывающий поворот оси гироскопа, угловая скорость поворота и момент инерции связаны следующим выражением
- 168. 200 Например, волчок, раскрученный в поле тяжести Земли будет испытывать поворот оси вращения. В поле сил
- 169. 200
- 170. 200 ЛЕКЦИЯ № 7 Элементы динамики сплошных сред.
- 171. 200 ВОПРОСЫ 21. Элементы гидродинамики. Идеальная несжимаемая жидкость. Уравнение неразрывности струи. Уравнение Бернулли. Основное уравнение гидростатики.
- 172. 200
- 173. 200 Основные определения С точки зрения механики жидкости и газы могут быть определены как такие среды,
- 174. 200 Газы занимают весь предоставленный объём. Жидкость обладает собственным объёмом, который изменяется лишь незначительно с изменением
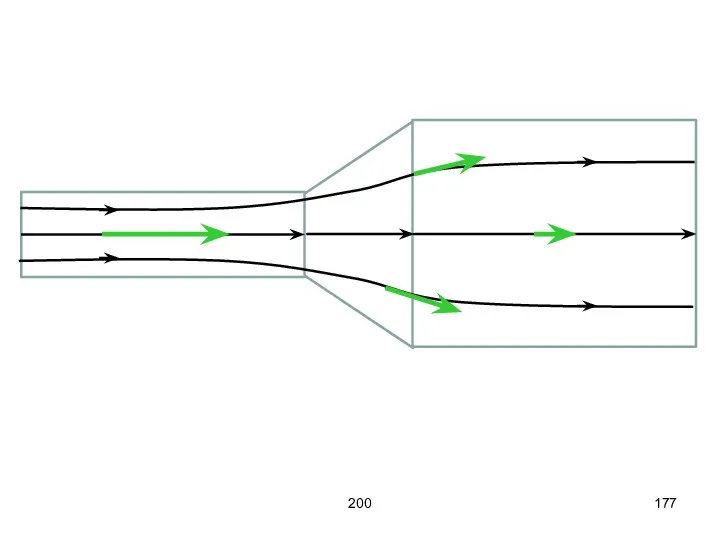
- 175. 200 Для описания движения жидкости указывают для каждой точки пространства вектор скорости как функцию времени.
- 176. 200 Совокупность векторов ʋ, заданны для всех точек пространства, образует поле вектора скорости. Линии тока –
- 177. 200
- 178. 200 Векторные поля Градиент – вектор, направленный в сторону наибольшего изменения поля. Если каждой точке P
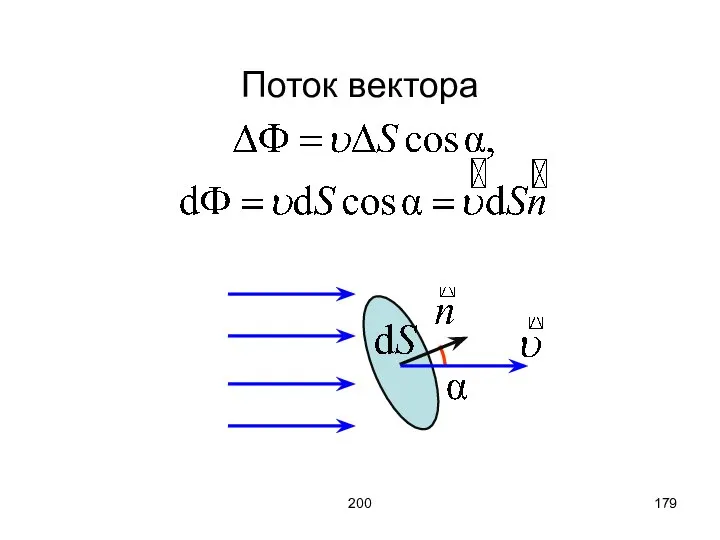
- 179. 200 Поток вектора
- 180. 200 Можно сравнить с потоком жидкости: Поток вектора «a» через поверхность S Если вектор входит в
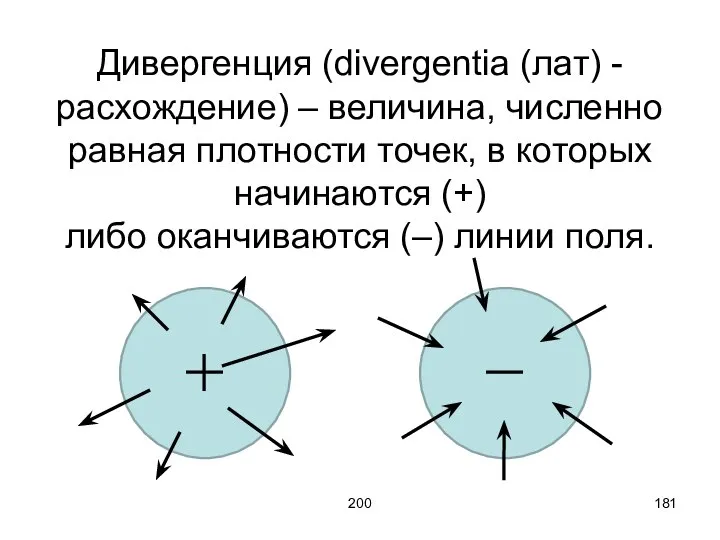
- 181. 200 Дивергенция (divergentia (лат) - расхождение) – величина, численно равная плотности точек, в которых начинаются (+)
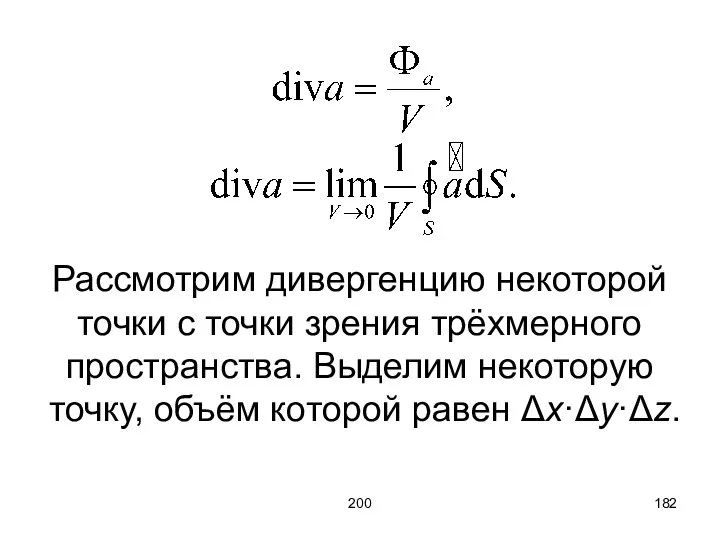
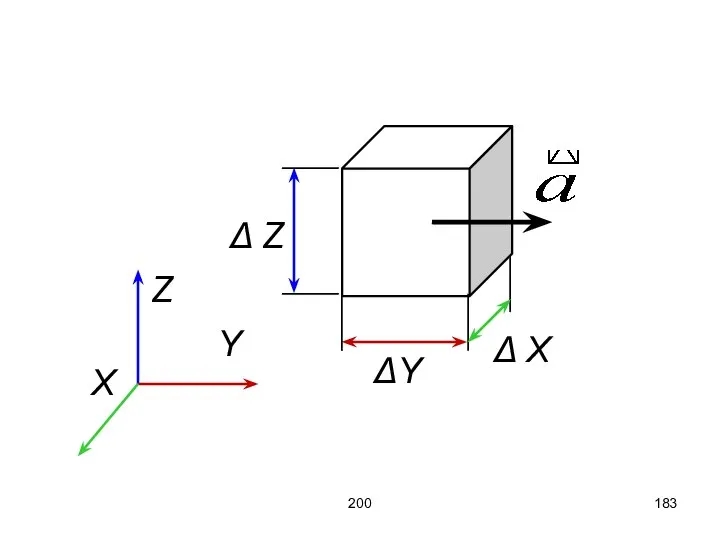
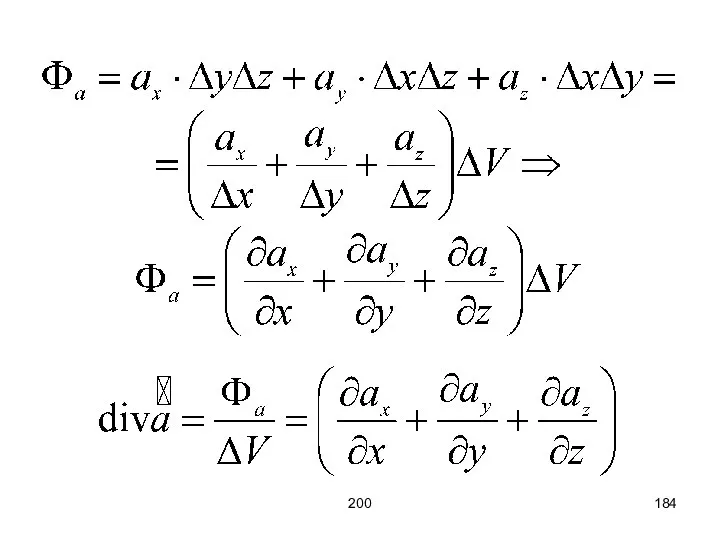
- 182. 200 Рассмотрим дивергенцию некоторой точки с точки зрения трёхмерного пространства. Выделим некоторую точку, объём которой равен
- 183. 200 Z Y X Δ Z ΔY Δ X
- 184. 200
- 185. 200 Теорема Остроградского-Гаусса (Теорема Гаусса): Поток вектора a сквозь замкнутую поверхность S равен алгебраической сумме источников
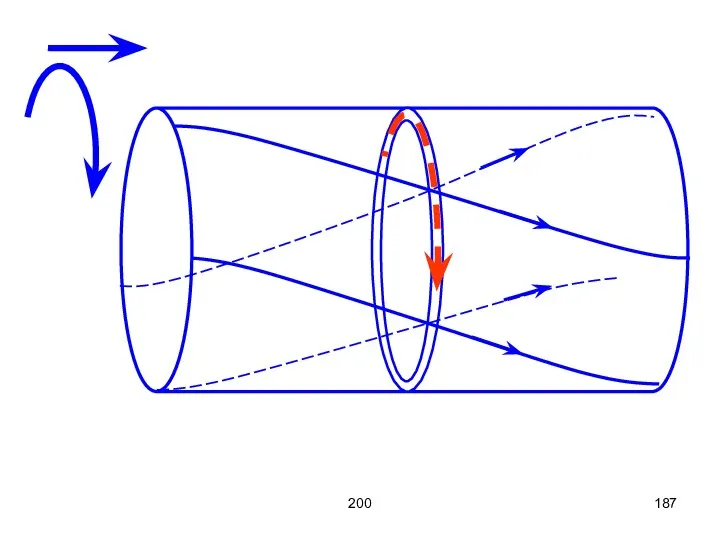
- 186. 200 Циркуляция Рассмотрим какой-нибудь канал в потоке. Если весь поток заморозить, оставить только этот канал, то
- 187. 200
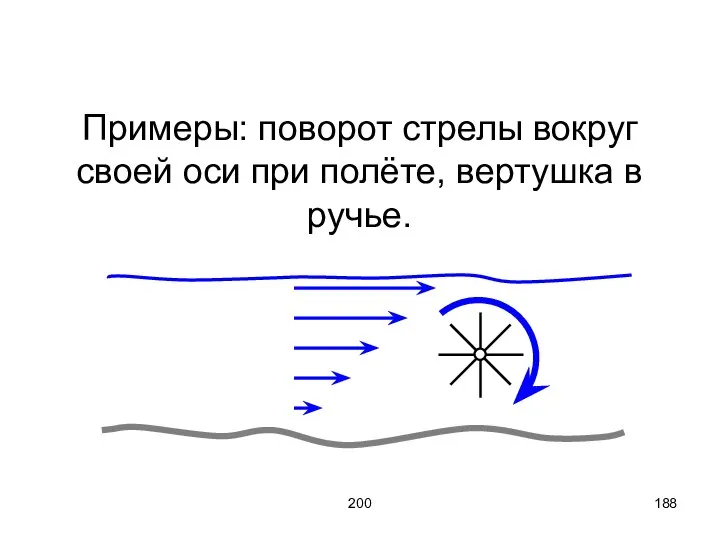
- 188. 200 Примеры: поворот стрелы вокруг своей оси при полёте, вертушка в ручье.
- 189. 200 Ротор – плотность порождения циркуляции.
- 190. 200
- 191. 200
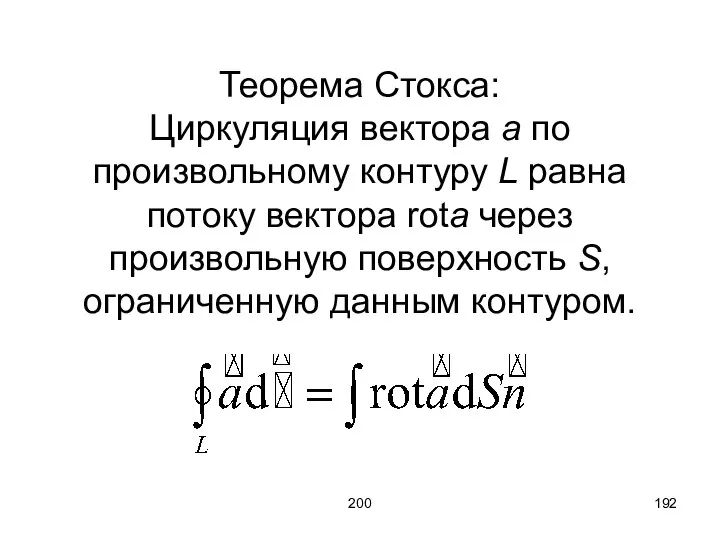
- 192. 200 Теорема Стокса: Циркуляция вектора a по произвольному контуру L равна потоку вектора rota через произвольную
- 193. 200
- 194. 200 21. Элементы гидродинамики. Идеальная несжимаемая жидкость. Уравнение неразрывности струи. Уравнение Бернулли. Основное уравнение гидростатики. Уравнение
- 195. 200 Рассмотрим идеальную жидкость (жидкость, в которой внутреннее трение (вязкость) полностью отсутствует). Также, будем считать, что
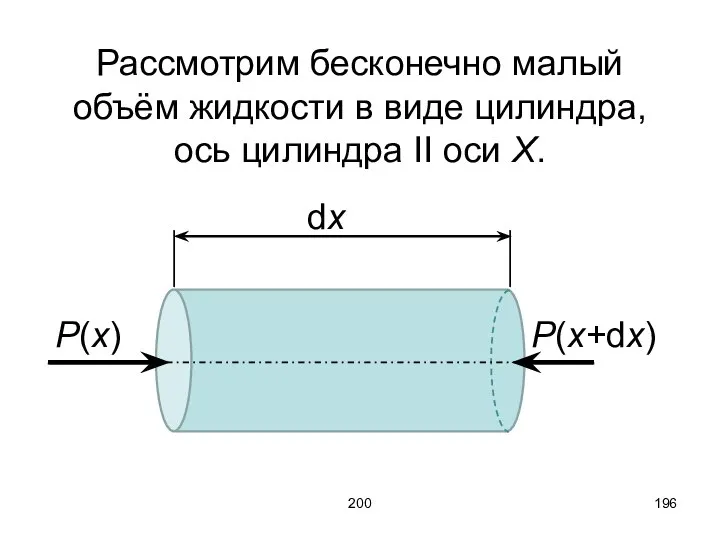
- 196. 200 Рассмотрим бесконечно малый объём жидкости в виде цилиндра, ось цилиндра II оси X. P(x+dx) dx
- 197. 200 Силы давления на боковую поверхность не учитываем, так как их проекция на ось X равна
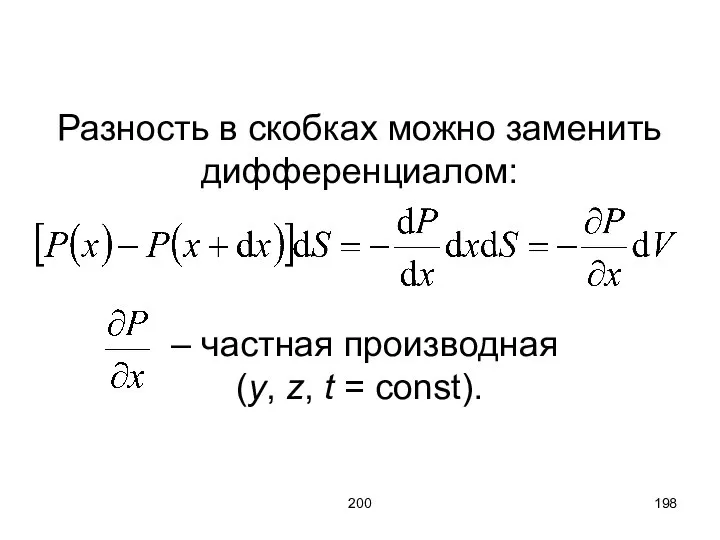
- 198. 200 Разность в скобках можно заменить дифференциалом: – частная производная (y, z, t = const).
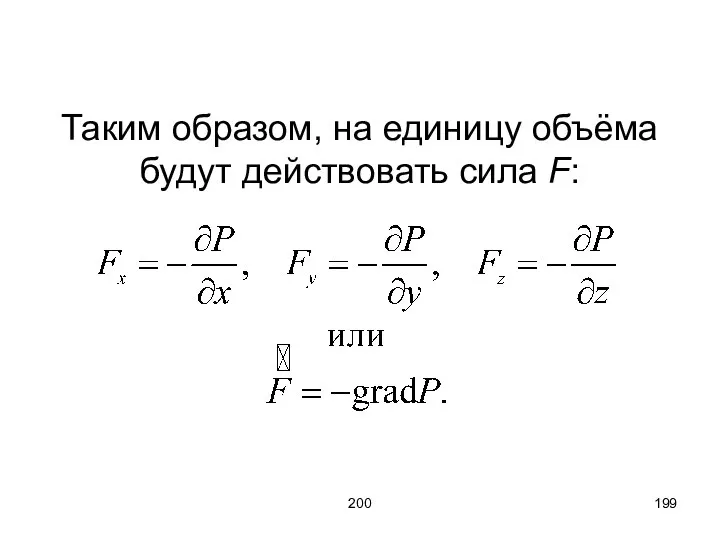
- 199. 200 Таким образом, на единицу объёма будут действовать сила F:
- 200. 200 В состоянии равновесия сила F (сила давления) должна уравновешиваться силой f (сила f – объёмная
- 201. 200 Основное уравнение гидростатики: Уравнение Эйлера:
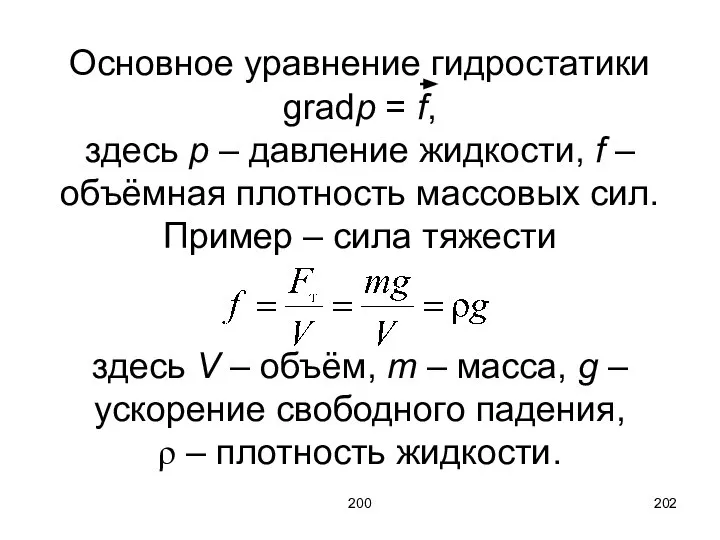
- 202. 200 Основное уравнение гидростатики gradp = f, здесь p – давление жидкости, f – объёмная плотность
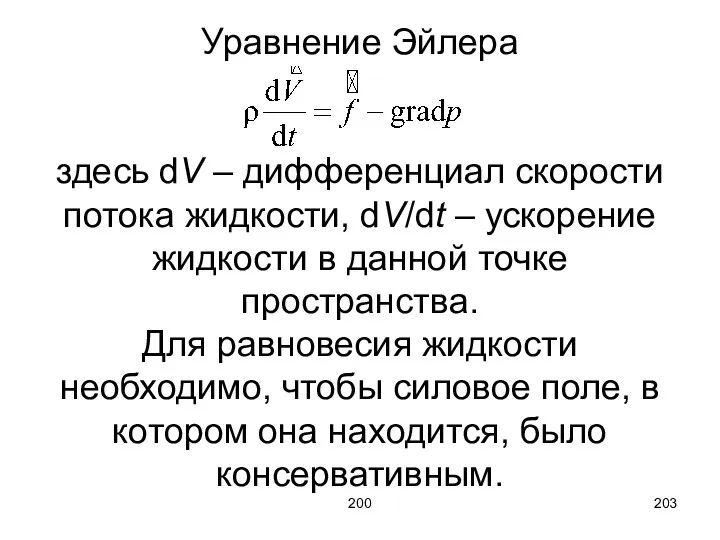
- 203. 200 Уравнение Эйлера здесь dV – дифференциал скорости потока жидкости, dV/dt – ускорение жидкости в данной
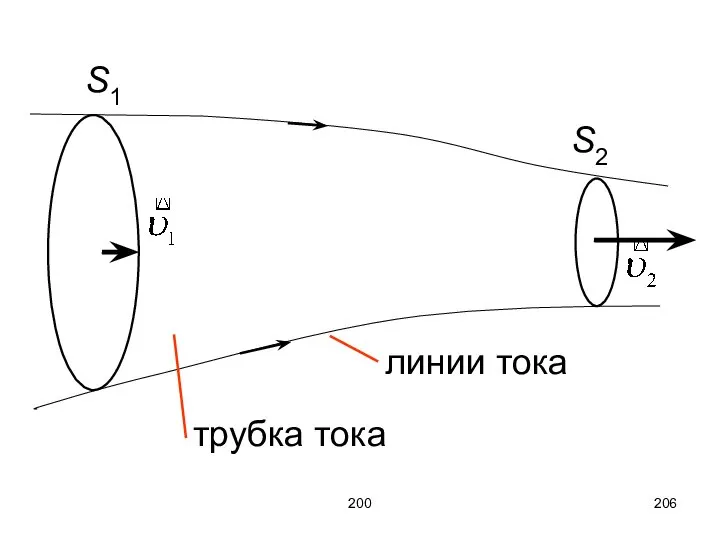
- 204. 200 Условие неразрывности жидкости Рассмотрим стационарный поток идеальной несжимаемой жидкости, рассмотрим некоторую трубку тока, ограниченную линиями
- 205. 200 Поскольку жидкость несжимаема, объём входящий равен объёму выходящему, но поперечное сечение изменяется, это приводит к
- 206. 200 линии тока трубка тока S1 S2
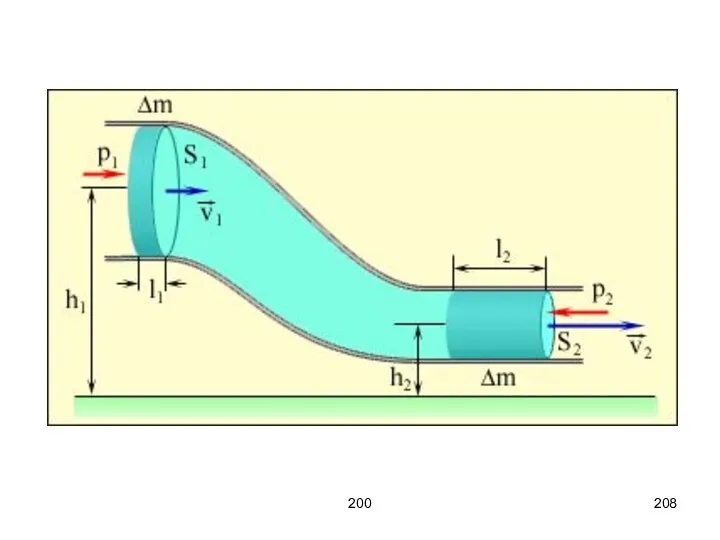
- 207. 200 Уравнение Бернулли Ещё раз рассмотрим некоторую трубку тока. В силу неразрывности ΔV1 = ΔV2 =
- 208. 200
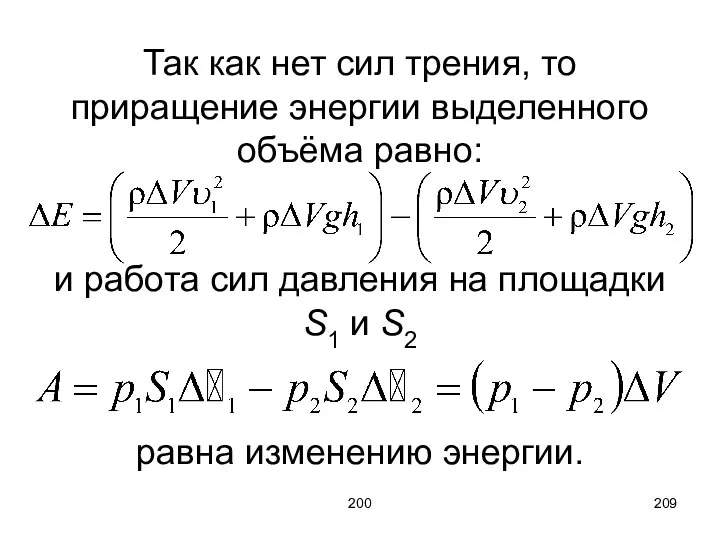
- 209. 200 Так как нет сил трения, то приращение энергии выделенного объёма равно: и работа сил давления
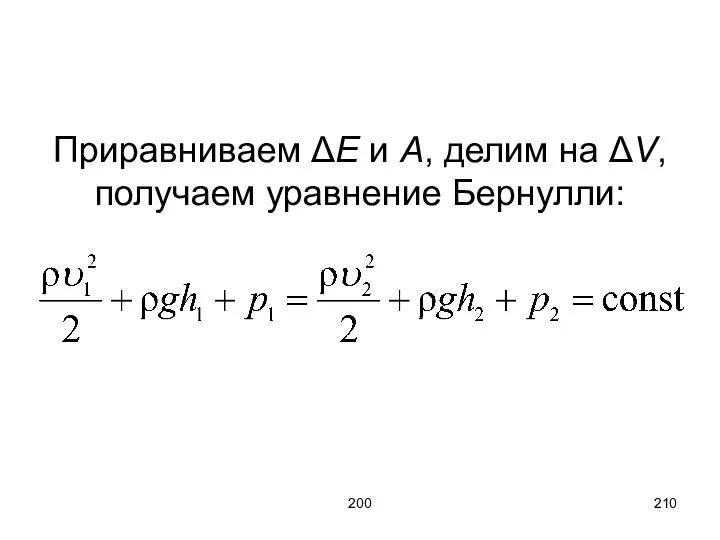
- 210. 200 Приравниваем ΔE и A, делим на ΔV, получаем уравнение Бернулли:
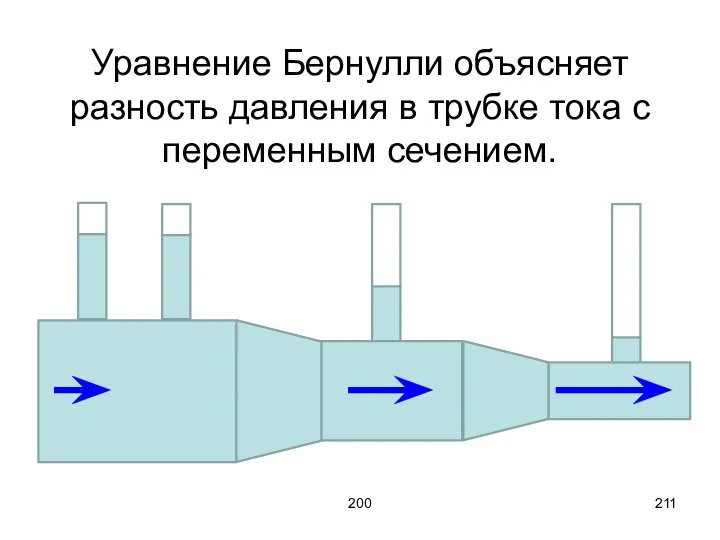
- 211. 200 Уравнение Бернулли объясняет разность давления в трубке тока с переменным сечением.
- 212. 200
- 213. 200
- 214. 200 22. Течение вязкой несжимаемой жидкости в трубе. Формула Пуазейля. Ламинарное и турбулентное течение.
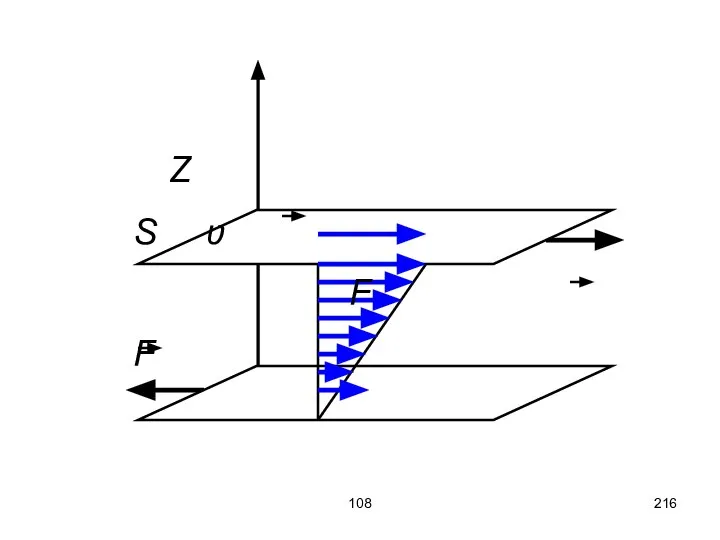
- 215. 200 Рассмотрим две плоские пластины, S – площадь пластинок, ℓ – длина пластинок, d – расстояние
- 216. 108 Z S ʋ F F
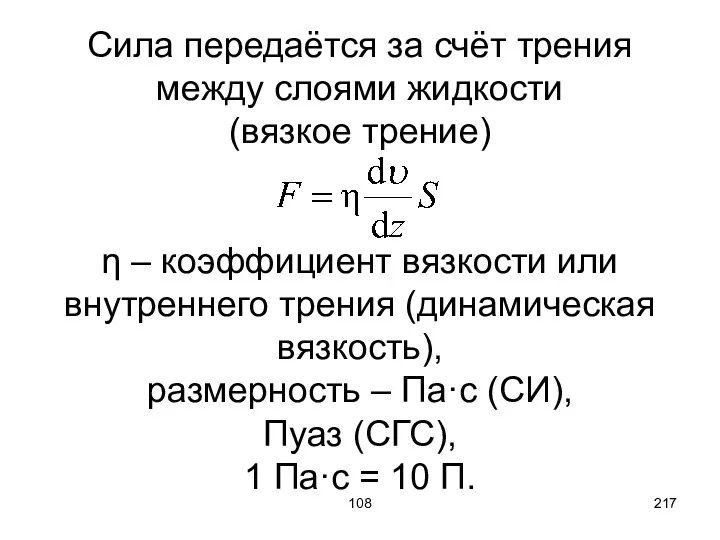
- 217. 108 Сила передаётся за счёт трения между слоями жидкости (вязкое трение) η – коэффициент вязкости или
- 218. 200 Стационарное течение вязкой жидкости Ламинарное течение – течение жидкости как бы отдельными слоями, которые не
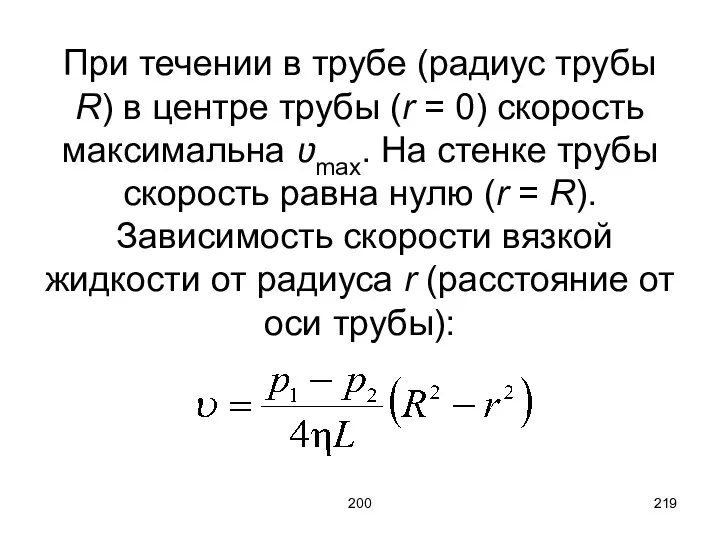
- 219. 200 При течении в трубе (радиус трубы R) в центре трубы (r = 0) скорость максимальна
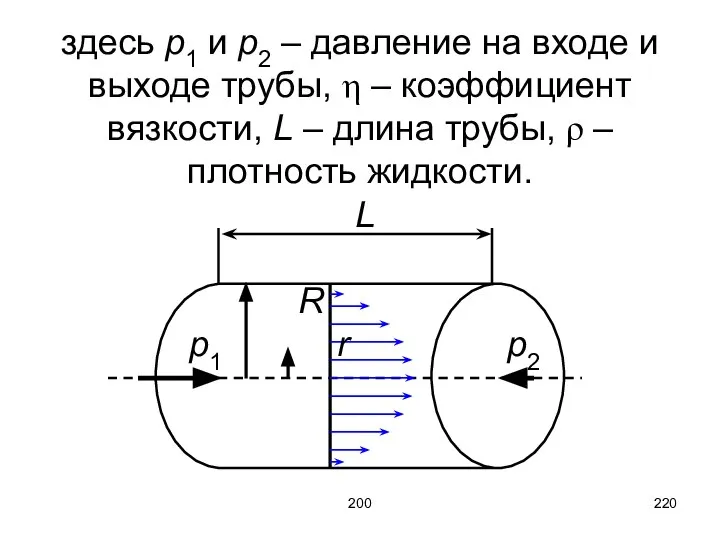
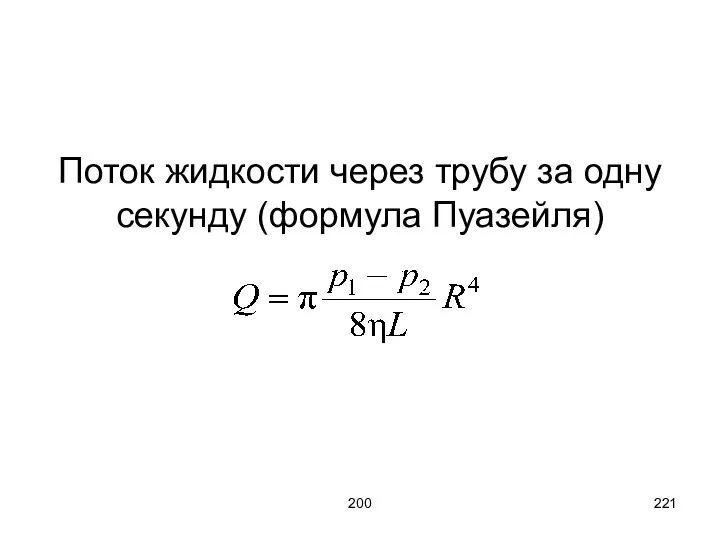
- 220. 200 здесь p1 и p2 – давление на входе и выходе трубы, η – коэффициент вязкости,
- 221. 200 Поток жидкости через трубу за одну секунду (формула Пуазейля)
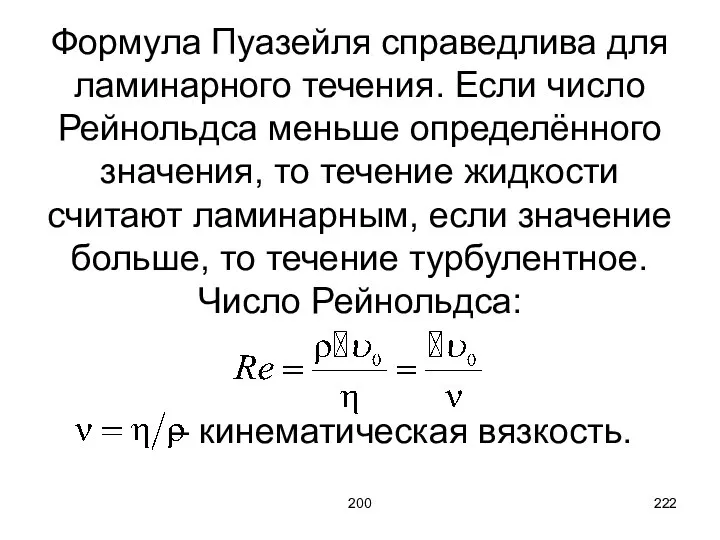
- 222. 200 Формула Пуазейля справедлива для ламинарного течения. Если число Рейнольдса меньше определённого значения, то течение жидкости
- 224. Скачать презентацию
200
ВОПРОСЫ
11. Принцип относительности в механике. Инерциальные системы отсчёта. Преобразования Галилея.
12. Неинерциальные
200
ВОПРОСЫ 11. Принцип относительности в механике. Инерциальные системы отсчёта. Преобразования Галилея. 12. Неинерциальные
200
Вопрос № 11.
Принцип относительности в механике.
Преобразования Галилея.
Инерциальные системы отсчёта.
200
Вопрос № 11.
Принцип относительности в механике.
Преобразования Галилея.
Инерциальные системы отсчёта.
200
Инерциальные системы
Рассмотрим две системы отсчёта, одна покоится (K), другая (K/) движется
200
Инерциальные системы Рассмотрим две системы отсчёта, одна покоится (K), другая (K/) движется
200
200
200
Запишем связь между координатами (x, y, z) и (x/, y/, z/)
200
Запишем связь между координатами (x, y, z) и (x/, y/, z/)
200
Получаем четыре уравнения
это преобразование Галилея, используем его если V0 << c,
200
Получаем четыре уравнения это преобразование Галилея, используем его если V0 << c,
200
Дифференцируем по времени:
200
Дифференцируем по времени:
200
Или в следующем виде (напоминаем, что только для выбранной схемы, рисунка)
200
Или в следующем виде (напоминаем, что только для выбранной схемы, рисунка)
200
Перейдём к векторам
Дифференцируем
или для уравнения движения
200
Перейдём к векторам
Дифференцируем
или для уравнения движения
200
Уравнения динамики не изменяются при переходе от одной инерциальной системы отсчёта
200
Уравнения динамики не изменяются при переходе от одной инерциальной системы отсчёта
200
Итак, все инерциальные системы отсчёта инвариантны: Уравнения движения выглядят одинаково (дифференциальные
200
Итак, все инерциальные системы отсчёта инвариантны: Уравнения движения выглядят одинаково (дифференциальные
200
200
200
12. Неинерциальные системы отсчёта. Сила инерции.
200
12. Неинерциальные системы отсчёта. Сила инерции.
200
Неинерциальные системы
Рассмотрим две системы отсчёта, одна инерциальная, вторая – неинерциальная, Имеется
200
Неинерциальные системы Рассмотрим две системы отсчёта, одна инерциальная, вторая – неинерциальная, Имеется
200
Разность ускорений тела в инерциальной и неинерциальной системах отсчёта
(для поступательного движения)
a
200
Разность ускорений тела в инерциальной и неинерциальной системах отсчёта (для поступательного движения) a
200
Через 2-й закон Ньютона представим ускорения.
Инерциальная система:
Неинерциальная система:
m – масса тела.
200
Через 2-й закон Ньютона представим ускорения.
Инерциальная система:
Неинерциальная система:
m – масса тела.
200
Отсюда, при F = 0 тело будет двигаться, в неинерциальной системе
200
Отсюда, при F = 0 тело будет двигаться, в неинерциальной системе
200
Пример: платформа с грузом
(a = 0)
T
mg
200
Пример: платформа с грузом
(a = 0)
T
mg
200
Платформа с грузом, наблюдатель стоит рядом,
T .
mg .
a
200
Платформа с грузом, наблюдатель стоит рядом,
T .
mg .
a
200
Платформа с грузом, наблюдатель на платформе,
T
mg
a
200
Платформа с грузом, наблюдатель на платформе,
T
mg
a
200
Все силы в физике обусловлены взаимодействием тел, то есть одно тело
200
Все силы в физике обусловлены взаимодействием тел, то есть одно тело
200
200
200
13. Силы инерции во вращающихся неинерциальных системах и системах. Принцип эквивалентности
200
13. Силы инерции во вращающихся неинерциальных системах и системах. Принцип эквивалентности
200
Рассмотрим движение тела по окружности.
В инерциальной системе тело удерживается на окружности
200
Рассмотрим движение тела по окружности. В инерциальной системе тело удерживается на окружности
143
143
200
Если наблюдать из инерционной системы отсчёта (наблюдатель находится рядом, не двигается),
200
Если наблюдать из инерционной системы отсчёта (наблюдатель находится рядом, не двигается),
200
Если наблюдать из неинерционной системы отсчёта (наблюдатель двигается по окружности радиусом
200
Если наблюдать из неинерционной системы отсчёта (наблюдатель двигается по окружности радиусом
200
Влияние центробежной силы на силу тяжести.
Сила гравитационного взаимодействия притягивает тела на
200
Влияние центробежной силы на силу тяжести. Сила гравитационного взаимодействия притягивает тела на
143
143
200
Центробежная сила на экваторе за счёт вращения Земли вокруг своей оси:
aцб
200
Центробежная сила на экваторе за счёт вращения Земли вокруг своей оси: aцб

200
При движении тела относительно вращающейся системы отсчёта, кроме центробежной силы инерции,
200
При движении тела относительно вращающейся системы отсчёта, кроме центробежной силы инерции,
200
200
200
200
200
Если ʋотн II ω и ʋотн ן R: Fк = 0.
При
200
Если ʋотн II ω и ʋотн ן R: Fк = 0. При
200
Принцип эквивалентности масс.
Все физические явления в гравитационном поле происходят совершенно так
200
Принцип эквивалентности масс. Все физические явления в гравитационном поле происходят совершенно так
200
(Или) масса гравитационная равняется массе инерционной
200
(Или) масса гравитационная равняется массе инерционной
200
Пустили фотон с некоторой частотой ν сверху вниз.
Энергия и масса фотона:
Eф
200
Пустили фотон с некоторой частотой ν сверху вниз. Энергия и масса фотона: Eф
200
Изменение частоты:
что и было зафиксировано. Точность измерений была:
200
Изменение частоты:
что и было зафиксировано. Точность измерений была:
200
200
200
ЛЕКЦИЯ № 5
Элементы релятивистской механики
200
ЛЕКЦИЯ № 5
Элементы релятивистской механики
200
ВОПРОСЫ
14. Предпосылки появления специальной теории относительности (СТО).
15. Преобразования Лоренца. Следствия из
200
ВОПРОСЫ 14. Предпосылки появления специальной теории относительности (СТО). 15. Преобразования Лоренца. Следствия из
200
14. Предпосылки появления специальной теории относительности (СТО).
200
14. Предпосылки появления специальной теории относительности (СТО).
200
Классическая физика рассматривает движение макротел с медленными скоростями.
Описание взаимодействия тел с
200
Классическая физика рассматривает движение макротел с медленными скоростями. Описание взаимодействия тел с
200
Однако это противоречит экспериментальным данным, которые появились к концу XIX века.
По
200
Однако это противоречит экспериментальным данным, которые появились к концу XIX века. По
200
В связи с механическим принципом относительности Галилея возникает вопрос:
равноправны ли
200
В связи с механическим принципом относительности Галилея возникает вопрос: равноправны ли
200
Как показал, Эйнштейн принцип относительности распространяется на любые физические явления, а
200
Как показал, Эйнштейн принцип относительности распространяется на любые физические явления, а
200
Позднее им была создана специальная теория относительности (СТО) для движения тел
200
Позднее им была создана специальная теория относительности (СТО) для движения тел
200
Позднее Эйнштейн создал общую теорию относительности (1916г.), которая учитывает большие гравитационные
200
Позднее Эйнштейн создал общую теорию относительности (1916г.), которая учитывает большие гравитационные
200
1-й постулат (релятивистский принцип относительности):
в любых инерциальных системах отсчета все
200
1-й постулат (релятивистский принцип относительности): в любых инерциальных системах отсчета все
200
Следовательно, все физические законы инвариантны (независимы) по отношению к выбору инерциальной
200
Следовательно, все физические законы инвариантны (независимы) по отношению к выбору инерциальной
200
2-й постулат (принцип инвариантности скорости света в вакууме):
Скорость света в
200
2-й постулат (принцип инвариантности скорости света в вакууме): Скорость света в
200
Эти принципы приводят к тому, что события одновременные в классической механике
200
Эти принципы приводят к тому, что события одновременные в классической механике
200
200
200
Для вагона точки обозначим через А*, С* и В*, причем А*В*=
200
Для вагона точки обозначим через А*, С* и В*, причем А*В*=
200
Наблюдатель же в точке В*, движущийся в направлении точки С*, заметит
200
Наблюдатель же в точке В*, движущийся в направлении точки С*, заметит
200
Наблюдатель на Земле, находясь в точке В увидит два пространственно разделенных
200
Наблюдатель на Земле, находясь в точке В увидит два пространственно разделенных
200
Следовательно, понятие одновременности относительно, т. е. два пространственно разделенных события, одновременные
200
Следовательно, понятие одновременности относительно, т. е. два пространственно разделенных события, одновременные
200
Это относится лишь к событиям, между которыми отсутствуют причинно-следственная связь. Причинно
200
Это относится лишь к событиям, между которыми отсутствуют причинно-следственная связь. Причинно
200
200
200
15. Преобразования Лоренца. Следствия из преобразований Лоренца: сокращение длины движущихся тел
200
15. Преобразования Лоренца. Следствия из преобразований Лоренца: сокращение длины движущихся тел
200
Для описания движения в СТО используют преобразования Лоренца, позволяющие переходить от
200
Для описания движения в СТО используют преобразования Лоренца, позволяющие переходить от
200
Преобразования Лоренца имеют наиболее простой вид в случае, когда сходственные оси
200
Преобразования Лоренца имеют наиболее простой вид в случае, когда сходственные оси
200
200
200
Начало отсчета времени выбирается в тот момент, когда координаты начала 0
200
Начало отсчета времени выбирается в тот момент, когда координаты начала 0
200
y = y′; y′ = y; z = z′; z′ =
200
y = y′; y′ = y; z = z′; z′ =
200
Следствия преобразований Лоренца.
Одновременность событий в разных системах отсчёта.
В системе К в
200
Следствия преобразований Лоренца. Одновременность событий в разных системах отсчёта. В системе К в
200
Но в системе К′ эти события произойдут моменты времени:
Но если события
200
Но в системе К′ эти события произойдут моменты времени: Но если события
200
Промежуток времени между событиями.
Существуют события, вызванные причинно-следственной связью. Например, чтобы
200
Промежуток времени между событиями. Существуют события, вызванные причинно-следственной связью. Например, чтобы
200
Бросок является причиной, а падение камня в воду – следствием.
1) сначала
200
Бросок является причиной, а падение камня в воду – следствием. 1) сначала
200
В связи с этим в СТО, хотя время и преобразуется, но
200
В связи с этим в СТО, хотя время и преобразуется, но
200
Тогда скорость пули
Используя преобразования Лоренца найдем промежуток времени между этими же
200
Тогда скорость пули Используя преобразования Лоренца найдем промежуток времени между этими же
200
где скорости u и ʋ << c.
Так как t2 > t1,
200
где скорости u и ʋ << c. Так как t2 > t1,
200
Поэтому
если событие происходит в одной и той же точке, т. е.
200
Поэтому если событие происходит в одной и той же точке, т. е.
200
т. е. промежуток времени между двумя событиями имеет меньшее значение в
200
т. е. промежуток времени между двумя событиями имеет меньшее значение в
200
Промежуток времени Δt – собственное время тела, в системе, где тело
200
Промежуток времени Δt – собственное время тела, в системе, где тело
200
Эксперименты подтвердили полученный результат.
Например, время жизни покоящихся мюонов τ ≈ 2
200
Эксперименты подтвердили полученный результат. Например, время жизни покоящихся мюонов τ ≈ 2
200
Длина тел в разных системах.
Длина стержня в ИСО равна разности координат
200
Длина тел в разных системах. Длина стержня в ИСО равна разности координат
200
Однако результат изменяется, когда наблюдатель и стержень движутся относительно друг друга.
200
Однако результат изменяется, когда наблюдатель и стержень движутся относительно друг друга.
200
Для вычисления длины стержня используют преобразования Лоренца.
Например, пусть некоторый стержень расположен
200
Для вычисления длины стержня используют преобразования Лоренца. Например, пусть некоторый стержень расположен
200
В ИСО К′, движущейся относительно ИСО К равномерно и прямолинейно со
200
В ИСО К′, движущейся относительно ИСО К равномерно и прямолинейно со
200
Используя преобразования Лоренца, имеем
то есть
200
Используя преобразования Лоренца, имеем
то есть
200
Если координаты концов отрезка в ИСО К′ измерены одновременно
(так как t′2
200
Если координаты концов отрезка в ИСО К′ измерены одновременно (так как t′2
200
Следовательно, длина отрезка в любой ИСО, относительно которой он движется, меньше
200
Следовательно, длина отрезка в любой ИСО, относительно которой он движется, меньше
200
200
200
16. Закон сложения скоростей в СТО. Релятивистский импульс. Энергия релятивистской частицы.
200
16. Закон сложения скоростей в СТО. Релятивистский импульс. Энергия релятивистской частицы.
200
Интервал
Любые события характеризуются точкой, где оно произошло, имеющей координаты х,
200
Интервал Любые события характеризуются точкой, где оно произошло, имеющей координаты х,
200
В обычной механике рассматривают пространственные координаты отдельно от времени и расстояние
200
В обычной механике рассматривают пространственные координаты отдельно от времени и расстояние
200
В релятивистской механике эта величина не является инвариантной.
Приходится учитывать четвёртую величину
200
В релятивистской механике эта величина не является инвариантной. Приходится учитывать четвёртую величину
200
Релятивистский закон сложения скоростей:
где ux – скорость м. т. (тела)
200
Релятивистский закон сложения скоростей: где ux – скорость м. т. (тела)
200
Для скоростей
параллельных осям Y и Z:
200
Для скоростей
параллельных осям Y и Z:
200
Релятивистский импульс в виде
обеспечивает инвариантность закона сохранения импульса по отношению
200
Релятивистский импульс в виде обеспечивает инвариантность закона сохранения импульса по отношению
200
здесь dr – перемещение частицы (материальной точки) в той ИСО, в
200
здесь dr – перемещение частицы (материальной точки) в той ИСО, в
200
Так как,
то
где
200
Так как,
то
где
200
Следовательно, релятивистский импульс частицы
200
Следовательно, релятивистский импульс частицы
200
Уравнение динамики
200
Уравнение динамики
200
Энергия
Энергия покоя
E0 = m0c2,
Энергия релятивистской частицы
m0 – масса покоя.
200
Энергия
Энергия покоя
E0 = m0c2,
Энергия релятивистской частицы
m0 – масса покоя.
200
Кинетическая энергия релятивистской частицы
200
Кинетическая энергия релятивистской частицы
200
Полная энергия
200
Полная энергия
200
Инварианта энергии и импульса
Величина E/c, px, py, pz образует четырёхвектор (вектор
200
Инварианта энергии и импульса Величина E/c, px, py, pz образует четырёхвектор (вектор
200
Рассмотрим неупругое соударение двух тел массой m каждое. Относительно системы К′
200
Рассмотрим неупругое соударение двух тел массой m каждое. Относительно системы К′
200
Система К′ движется относительно системы К со скоростью ʋ0.
В системе К′
В
200
Система К′ движется относительно системы К со скоростью ʋ0. В системе К′ В
200
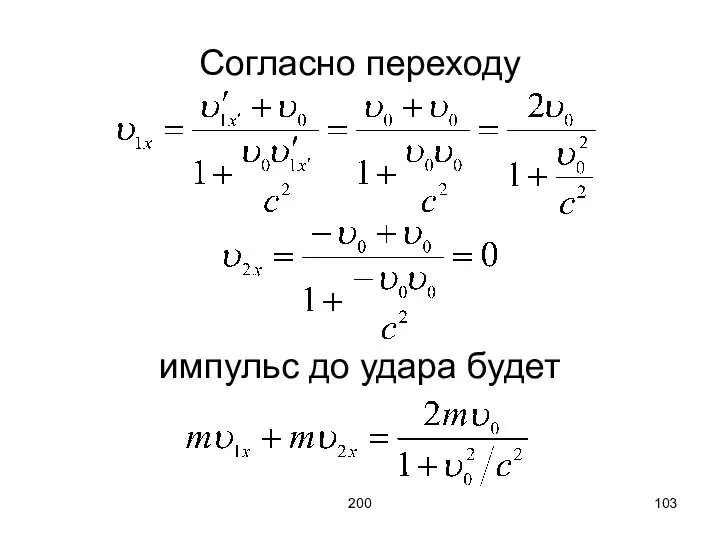
Согласно переходу
импульс до удара будет
200
Согласно переходу
импульс до удара будет
200
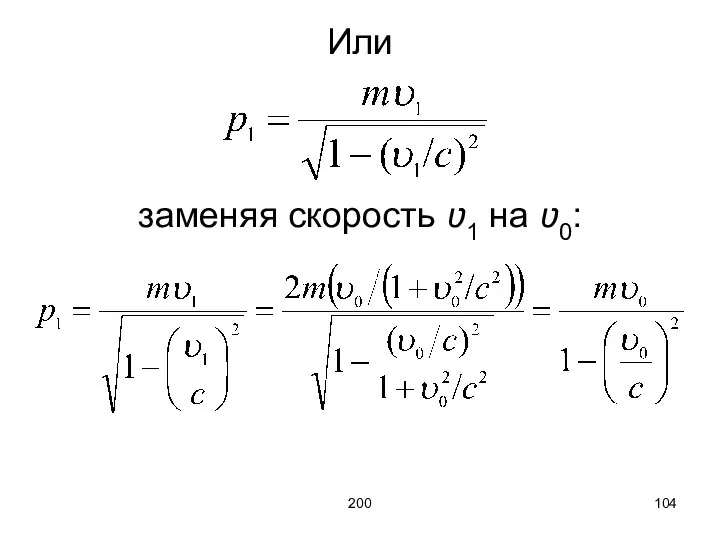
Или
заменяя скорость ʋ1 на ʋ0:
200
Или
заменяя скорость ʋ1 на ʋ0:
200
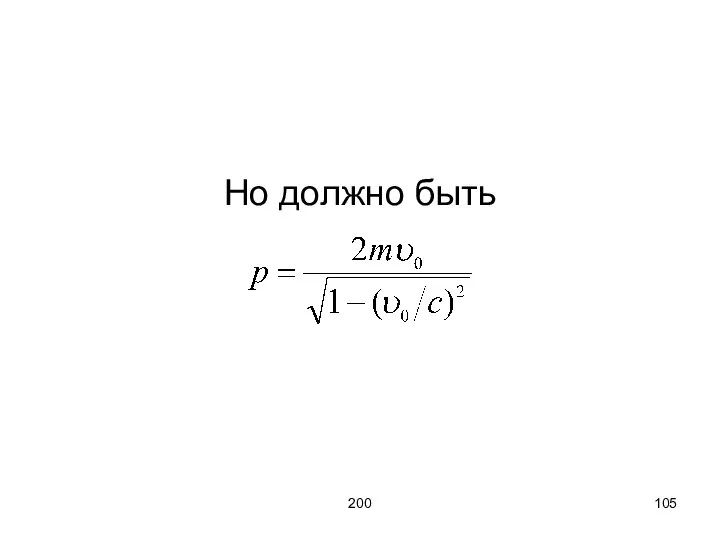
Но должно быть
200
Но должно быть
200
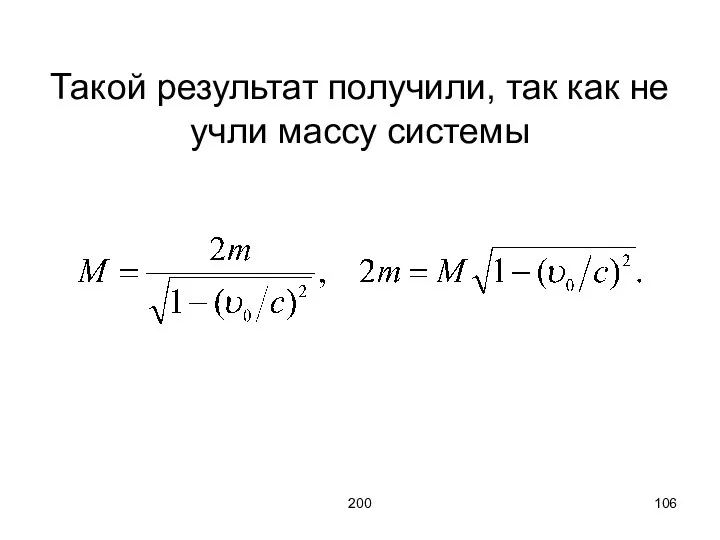
Такой результат получили, так как не учли массу системы
200
Такой результат получили, так как не учли массу системы
200
Это обусловлено тем, что кинетическая энергия частиц превратилась в эквивалентное количество
200
Это обусловлено тем, что кинетическая энергия частиц превратилась в эквивалентное количество
200
200
200
ЛЕКЦИЯ № 6
Элементы механики твёрдого тела.
200
ЛЕКЦИЯ № 6
Элементы механики твёрдого тела.
200
ВОПРОСЫ
17. Условия равновесия твёрдого тела. Мгновенная ось вращения.
18. Кинетическая энергия вращающегося
200
ВОПРОСЫ 17. Условия равновесия твёрдого тела. Мгновенная ось вращения. 18. Кинетическая энергия вращающегося
200
19. Основной закон динамики вращательного движения твёрдого тела. Момент инерции, его
200
19. Основной закон динамики вращательного движения твёрдого тела. Момент инерции, его
200
17. Условия равновесия твёрдого тела. Мгновенная ось вращения.
200
17. Условия равновесия твёрдого тела. Мгновенная ось вращения.

200
В случае описания положения и/или движения материальной точки достаточно 3-х степеней
200
В случае описания положения и/или движения материальной точки достаточно 3-х степеней
200
Для абсолютно твёрдого тела (тело, деформациями которого можно пренебречь) необходимо 6
200
Для абсолютно твёрдого тела (тело, деформациями которого можно пренебречь) необходимо 6
200
Уравнение динамики движения центра масс
Уравнение динамики вращательного движения
200
Уравнение динамики движения центра масс
Уравнение динамики вращательного движения
200
Если Fвнеш и Mвнеш равны нулю, то тело будет находиться в
200
Если Fвнеш и Mвнеш равны нулю, то тело будет находиться в
200
Не всегда можно пользоваться моделью абсолютно твёрдого тела.
Пример: рассмотрим балку на
200
Не всегда можно пользоваться моделью абсолютно твёрдого тела. Пример: рассмотрим балку на
200
F1 F3 F2
P
x
ℓ
Здесь два уравнения и три неизвестных:
200
F1 F3 F2 P x ℓ Здесь два уравнения и три неизвестных:
200
Данная задача оказалась неопределённой, решить её можно, если придать одной из
200
Данная задача оказалась неопределённой, решить её можно, если придать одной из
200
Физики про себя шутят: если им дать задачу о равновесии стола
200
Физики про себя шутят: если им дать задачу о равновесии стола
200
Любое движение твёрдого тела может быть представлено как наложение двух типов
200
Любое движение твёрдого тела может быть представлено как наложение двух типов
200
Элементарное перемещение твёрдого тела при плоском движении всегда можно представить как
200
Элементарное перемещение твёрдого тела при плоском движении всегда можно представить как
200
Пример: катящийся цилиндр. Плоское движение твёрдого тела можно рассматривать как ряд
200
Пример: катящийся цилиндр. Плоское движение твёрдого тела можно рассматривать как ряд
200
ω
dφ
ʋ ʋ
O O/
200
ω
dφ
ʋ ʋ
O O/

200
200
200
18. Кинетическая энергия вращающегося твёрдого тела. Работа момента силы.
200
18. Кинетическая энергия вращающегося твёрдого тела. Работа момента силы.
200
Получим выражение для кинетической энергии вращающегося тела. Рассмотрим вращение тела вокруг
200
Получим выражение для кинетической энергии вращающегося тела. Рассмотрим вращение тела вокруг
200
Z
ω
fi Fi
Ri
mi
ri
O
200
Z
ω
fi Fi
Ri
mi
ri
O
200
Кинетическая энергия элементарной массы mi:
Кинетическая энергия всего тела:
200
Кинетическая энергия элементарной массы mi:
Кинетическая энергия всего тела:
200
Рассмотрим силы, действующие на элементарную массу mi: внешние Fi, внутренние fi
200
Рассмотрим силы, действующие на элементарную массу mi: внешние Fi, внутренние fi
200
С другой стороны, работа внешних сил идёт на приращение кинетической энергии
200
С другой стороны, работа внешних сил идёт на приращение кинетической энергии
200
Так, мяч или обруч, брошенный горизонтально без вращения, раскрутится. Кинетическая энергия
200
Так, мяч или обруч, брошенный горизонтально без вращения, раскрутится. Кинетическая энергия
200
И наоборот, раскрученный обруч, опущенный на горизонтальную опору, приобретёт горизонтальную скорость
200
И наоборот, раскрученный обруч, опущенный на горизонтальную опору, приобретёт горизонтальную скорость
200
Теперь вычислим кинетическую энергию, поступательную и вращательную при плоском движении.
Скорость i-й
200
Теперь вычислим кинетическую энергию, поступательную и вращательную при плоском движении. Скорость i-й
200
Получим выражение для кинетической энергии твёрдого тела:
200
Получим выражение для кинетической энергии твёрдого тела:
200
Отметим следующее:
Ri – расстояние от точки с массой mi до оси
200
Отметим следующее: Ri – расстояние от точки с массой mi до оси
200
здесь Σmi = m – масса всего тела,
если в качестве точки
200
здесь Σmi = m – масса всего тела, если в качестве точки
200
В итоге получили выражение кинетической энергии поступательного и вращательного движения (ось
200
В итоге получили выражение кинетической энергии поступательного и вращательного движения (ось
200
200
200
19. Основной закон динамики вращательного движения твёрдого тела. Момент инерции, его
200
19. Основной закон динамики вращательного движения твёрдого тела. Момент инерции, его
200
Рассмотрим вращение тела вокруг неподвижной оси
В общем случае вектор L не
200
Рассмотрим вращение тела вокруг неподвижной оси В общем случае вектор L не
200
Z
L
ω
O
200
Z
L
ω
O
200
В случае однородного тела, симметричного относительного оси вращения, момент импульса относительно
200
В случае однородного тела, симметричного относительного оси вращения, момент импульса относительно
200
Момент инерции зависит от выбора оси.
Свободная ось – ось, положение которой
200
Момент инерции зависит от выбора оси. Свободная ось – ось, положение которой
200
200
200
Вычислим момент инерции однородного шара. Разобьём его на бесконечно тонкие сферические
200
Вычислим момент инерции однородного шара. Разобьём его на бесконечно тонкие сферические
200
200
200
Момент инерции шара складывается из моментов инерции сферических слоёв:
200
Момент инерции шара складывается из моментов инерции сферических слоёв:
200
Если происходит параллельный перенос оси вращения, то момент инерции увеличивается, согласно
200
Если происходит параллельный перенос оси вращения, то момент инерции увеличивается, согласно
200
Моменты инерции:
момент инерции кольца (обруча)
200
Моменты инерции:
момент инерции кольца (обруча)
200
Момент инерции диска
200
Момент инерции диска
200
Момент инерции шара и сферы
200
Момент инерции шара и сферы
200
Момент инерции стержня
200
Момент инерции стержня
200
200
200
20. Закон сохранения момента импульса изолированной системы. Изотропность пространства и закон
200
20. Закон сохранения момента импульса изолированной системы. Изотропность пространства и закон
143
Из основного уравнения динамики вращательного движения
Можно получить закон сохранения момента импульса
143
Из основного уравнения динамики вращательного движения Можно получить закон сохранения момента импульса
143
Пространство однородно, следовательно, параллельный перенос системы из одного места в другое
143
Пространство однородно, следовательно, параллельный перенос системы из одного места в другое
143
Пространство изотропно, следовательно, поворот замкнутой системы как целого не отражается на
143
Пространство изотропно, следовательно, поворот замкнутой системы как целого не отражается на
200
Как правило, момент инерции не изменяется (I = const), следовательно, в
200
Как правило, момент инерции не изменяется (I = const), следовательно, в
200
Если же момент инерции можно изменять, то угловая скорость тоже изменяется.
200
Если же момент инерции можно изменять, то угловая скорость тоже изменяется.
200
Гироскоп (волчок) – массивное симметричное тело, вращающееся с большой скоростью вокруг
200
Гироскоп (волчок) – массивное симметричное тело, вращающееся с большой скоростью вокруг
200
dL F1
L/ L
dφ
M
F2
Z
Y
X
200
dL F1
L/ L
dφ
M
F2
Z
Y
X
200
Пара сил F1 и F2 (F1 = F2) перпендикулярны плоскости рисунка
200
Пара сил F1 и F2 (F1 = F2) перпендикулярны плоскости рисунка
200
Поскольку момент импульса L был направлен вертикально вверх
(ось Z), а его
200
Поскольку момент импульса L был направлен вертикально вверх (ось Z), а его
200
В самом деле
200
В самом деле
200
Угол поворота и угловая скорость поворота оси вращения:
200
Угол поворота и угловая скорость поворота оси вращения:
200
Момент силы, вызывающий поворот оси гироскопа, угловая скорость поворота и момент
200
Момент силы, вызывающий поворот оси гироскопа, угловая скорость поворота и момент
200
Например, волчок, раскрученный в поле тяжести Земли будет испытывать поворот оси
200
Например, волчок, раскрученный в поле тяжести Земли будет испытывать поворот оси
200
200
200
ЛЕКЦИЯ № 7
Элементы динамики сплошных сред.
200
ЛЕКЦИЯ № 7
Элементы динамики сплошных сред.
200
ВОПРОСЫ
21. Элементы гидродинамики. Идеальная несжимаемая жидкость. Уравнение неразрывности струи. Уравнение Бернулли.
200
ВОПРОСЫ 21. Элементы гидродинамики. Идеальная несжимаемая жидкость. Уравнение неразрывности струи. Уравнение Бернулли.
200
200
200
Основные определения
С точки зрения механики жидкости и газы могут быть определены
200
Основные определения С точки зрения механики жидкости и газы могут быть определены
200
Газы занимают весь предоставленный объём. Жидкость обладает собственным объёмом, который изменяется
200
Газы занимают весь предоставленный объём. Жидкость обладает собственным объёмом, который изменяется
200
Для описания движения жидкости указывают для каждой точки пространства вектор скорости
200
Для описания движения жидкости указывают для каждой точки пространства вектор скорости
200
Совокупность векторов ʋ, заданны для всех точек пространства, образует поле вектора
200
Совокупность векторов ʋ, заданны для всех точек пространства, образует поле вектора
200
200
200
Векторные поля
Градиент – вектор, направленный в сторону наибольшего изменения поля.
Если каждой
200
Векторные поля Градиент – вектор, направленный в сторону наибольшего изменения поля. Если каждой
200
Поток вектора
200
Поток вектора
200
Можно сравнить с потоком жидкости:
Поток вектора «a» через поверхность S
Если вектор
200
Можно сравнить с потоком жидкости: Поток вектора «a» через поверхность S Если вектор
200
Дивергенция (divergentia (лат) - расхождение) – величина, численно равная плотности точек,
200
Дивергенция (divergentia (лат) - расхождение) – величина, численно равная плотности точек,
200
Рассмотрим дивергенцию некоторой точки с точки зрения трёхмерного пространства. Выделим некоторую
200
Рассмотрим дивергенцию некоторой точки с точки зрения трёхмерного пространства. Выделим некоторую
200
Z
Y
X
Δ Z
ΔY
Δ X
200
Z
Y
X
Δ Z
ΔY
Δ X
200
200
200
Теорема Остроградского-Гаусса (Теорема Гаусса):
Поток вектора a сквозь замкнутую поверхность S равен
200
Теорема Остроградского-Гаусса (Теорема Гаусса): Поток вектора a сквозь замкнутую поверхность S равен
200
Циркуляция
Рассмотрим какой-нибудь канал в потоке. Если весь поток заморозить, оставить только
200
Циркуляция Рассмотрим какой-нибудь канал в потоке. Если весь поток заморозить, оставить только
200
200
200
Примеры: поворот стрелы вокруг своей оси при полёте, вертушка в ручье.
200
Примеры: поворот стрелы вокруг своей оси при полёте, вертушка в ручье.
200
Ротор – плотность порождения циркуляции.
200
Ротор – плотность порождения циркуляции.
200
200
200
200
200
Теорема Стокса:
Циркуляция вектора a по произвольному контуру L равна потоку вектора
200
Теорема Стокса: Циркуляция вектора a по произвольному контуру L равна потоку вектора
200
200
200
21. Элементы гидродинамики. Идеальная несжимаемая жидкость. Уравнение неразрывности струи. Уравнение Бернулли.
200
21. Элементы гидродинамики. Идеальная несжимаемая жидкость. Уравнение неразрывности струи. Уравнение Бернулли.
200
Рассмотрим идеальную жидкость (жидкость, в которой внутреннее трение (вязкость) полностью отсутствует).
200
Рассмотрим идеальную жидкость (жидкость, в которой внутреннее трение (вязкость) полностью отсутствует).
200
Рассмотрим бесконечно малый объём жидкости в виде цилиндра, ось цилиндра II
200
Рассмотрим бесконечно малый объём жидкости в виде цилиндра, ось цилиндра II
200
Силы давления на боковую поверхность не учитываем, так как их проекция
200
Силы давления на боковую поверхность не учитываем, так как их проекция
200
Разность в скобках можно заменить дифференциалом:
– частная производная
(y, z, t
200
Разность в скобках можно заменить дифференциалом: – частная производная (y, z, t
200
Таким образом, на единицу объёма будут действовать сила F:
200
Таким образом, на единицу объёма будут действовать сила F:
200
В состоянии равновесия сила F (сила давления) должна уравновешиваться силой f
(сила
200
В состоянии равновесия сила F (сила давления) должна уравновешиваться силой f (сила
200
Основное уравнение гидростатики:
Уравнение Эйлера:
200
Основное уравнение гидростатики:
Уравнение Эйлера:
200
Основное уравнение гидростатики
gradp = f,
здесь p – давление жидкости, f –
200
Основное уравнение гидростатики gradp = f, здесь p – давление жидкости, f –
200
Уравнение Эйлера
здесь dV – дифференциал скорости потока жидкости, dV/dt – ускорение
200
Уравнение Эйлера здесь dV – дифференциал скорости потока жидкости, dV/dt – ускорение
200
Условие неразрывности жидкости
Рассмотрим стационарный поток идеальной несжимаемой жидкости, рассмотрим некоторую трубку
200
Условие неразрывности жидкости Рассмотрим стационарный поток идеальной несжимаемой жидкости, рассмотрим некоторую трубку
200
Поскольку жидкость несжимаема, объём входящий равен объёму выходящему, но поперечное сечение
200
Поскольку жидкость несжимаема, объём входящий равен объёму выходящему, но поперечное сечение
200
линии тока
трубка тока
S1
S2
200
линии тока
трубка тока
S1
S2
200
Уравнение Бернулли
Ещё раз рассмотрим некоторую трубку тока.
В силу неразрывности
ΔV1 = ΔV2
200
Уравнение Бернулли Ещё раз рассмотрим некоторую трубку тока. В силу неразрывности ΔV1 = ΔV2
200
200
200
Так как нет сил трения, то приращение энергии выделенного объёма равно:
и
200
Так как нет сил трения, то приращение энергии выделенного объёма равно: и
200
Приравниваем ΔE и A, делим на ΔV, получаем уравнение Бернулли:
200
Приравниваем ΔE и A, делим на ΔV, получаем уравнение Бернулли:
200
Уравнение Бернулли объясняет разность давления в трубке тока с переменным сечением.
200
Уравнение Бернулли объясняет разность давления в трубке тока с переменным сечением.
200
200
200
200
200
22. Течение вязкой несжимаемой жидкости в трубе. Формула Пуазейля. Ламинарное и
200
22. Течение вязкой несжимаемой жидкости в трубе. Формула Пуазейля. Ламинарное и
200
Рассмотрим две плоские пластины,
S – площадь пластинок,
ℓ – длина пластинок,
d –
200
Рассмотрим две плоские пластины, S – площадь пластинок, ℓ – длина пластинок, d –
108
Z
S ʋ
F
F
108
Z
S ʋ
F
F
108
Сила передаётся за счёт трения между слоями жидкости
(вязкое трение)
η – коэффициент
108
Сила передаётся за счёт трения между слоями жидкости (вязкое трение) η – коэффициент
200
Стационарное течение вязкой жидкости
Ламинарное течение – течение жидкости как бы отдельными
200
Стационарное течение вязкой жидкости Ламинарное течение – течение жидкости как бы отдельными
200
При течении в трубе (радиус трубы R) в центре трубы (r
200
При течении в трубе (радиус трубы R) в центре трубы (r
200
здесь p1 и p2 – давление на входе и выходе трубы,
200
здесь p1 и p2 – давление на входе и выходе трубы,
200
Поток жидкости через трубу за одну секунду (формула Пуазейля)
200
Поток жидкости через трубу за одну секунду (формула Пуазейля)
200
Формула Пуазейля справедлива для ламинарного течения. Если число Рейнольдса меньше определённого
200
Формула Пуазейля справедлива для ламинарного течения. Если число Рейнольдса меньше определённого
 Интенсивность звука в идеальной жидкости
Интенсивность звука в идеальной жидкости Презентация по физике "Основное уравнение МКТ" - скачать
Презентация по физике "Основное уравнение МКТ" - скачать  Аттестационная работа. Бурение нефтяных и газовых скважин. Методика расчета утяжеленных бурильных труб
Аттестационная работа. Бурение нефтяных и газовых скважин. Методика расчета утяжеленных бурильных труб УФ-спектроскопия. Часть 1
УФ-спектроскопия. Часть 1 Презентация по физике "закон Кулона" - скачать
Презентация по физике "закон Кулона" - скачать  Презентация по физике "Использование нетрадиционного источника энергии в работе ветродвигателя" - скачать
Презентация по физике "Использование нетрадиционного источника энергии в работе ветродвигателя" - скачать  Качество изображения астрономических объективов и изображений математически-смоделированного точечного источника
Качество изображения астрономических объективов и изображений математически-смоделированного точечного источника Дисперсія світла
Дисперсія світла Инерция (7 класс) - Презентация по физике
Инерция (7 класс) - Презентация по физике Законы постоянного тока
Законы постоянного тока Второй закон термодинамики. Энтропия. (Лекция 3)
Второй закон термодинамики. Энтропия. (Лекция 3) Александр Степанович Попов – творец «русского» радио
Александр Степанович Попов – творец «русского» радио Презентация к работе «Воздействие музыкального звука разных частот на растения» Автор: Еретина Валентина, 9 «а» класс лицея-инте
Презентация к работе «Воздействие музыкального звука разных частот на растения» Автор: Еретина Валентина, 9 «а» класс лицея-инте МОБІЛЬНИЙ ЗВ’ЯЗОК Основні поняття Статистичні дані Принцип дії Вплив випромінювання Ситуація в Україні
МОБІЛЬНИЙ ЗВ’ЯЗОК Основні поняття Статистичні дані Принцип дії Вплив випромінювання Ситуація в Україні  Колебательный контур. Свободные и вынужденные электромагнитные колебания.
Колебательный контур. Свободные и вынужденные электромагнитные колебания.  Тепловые двигатели. История создания. Устройство. Принцип действия. Коэффициент полезного действия
Тепловые двигатели. История создания. Устройство. Принцип действия. Коэффициент полезного действия Методы измерения плотности материалов
Методы измерения плотности материалов Оптические методы анализа. Введение. Рефрактометрический анализ
Оптические методы анализа. Введение. Рефрактометрический анализ Тема урока: «Давление газа»
Тема урока: «Давление газа» Лекция 21 (4). Корпускулярно-волновой дуализм. Уравнение Шрёдингера
Лекция 21 (4). Корпускулярно-волновой дуализм. Уравнение Шрёдингера Электромагниттік өріс
Электромагниттік өріс CVVT System (Continuously Variable Valve Timing – Постоянно изменяемые фазы газораспределения)
CVVT System (Continuously Variable Valve Timing – Постоянно изменяемые фазы газораспределения) Диагностирование, техническое обслуживание и ремонт ходовой части ГАЗ 3307
Диагностирование, техническое обслуживание и ремонт ходовой части ГАЗ 3307 Электрическая свеча Ябочкова
Электрическая свеча Ябочкова Фізика 9 кл. магнітні явища
Фізика 9 кл. магнітні явища Рентгеновские лучи
Рентгеновские лучи Статистические и термодинамические свойства макросистем
Статистические и термодинамические свойства макросистем Формирование учебно-познавательных компетенций при решении физических задач
Формирование учебно-познавательных компетенций при решении физических задач