- Вращательное движение

Содержание
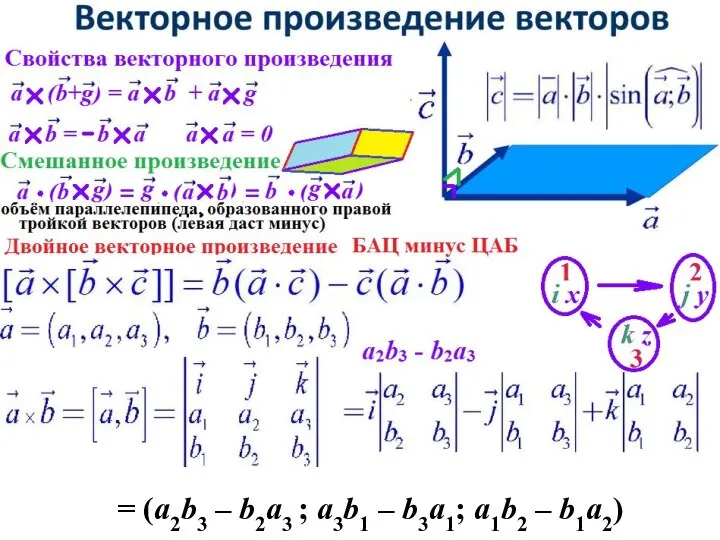
= (a2b3 – b2a3 ; a3b1 – b3a1; a1b2 – b1a2)
= (a2b3 – b2a3 ; a3b1 – b3a1; a1b2 – b1a2)
![Поворот и вращение [cos (ωt)]’ = - ω sin(ωt) [sin (ωt)]’](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/748171/slide-2.jpg)
Поворот и вращение
[cos (ωt)]’ = - ω sin(ωt)
[sin (ωt)]’ =
Поворот и вращение
[cos (ωt)]’ = - ω sin(ωt)
[sin (ωt)]’ =
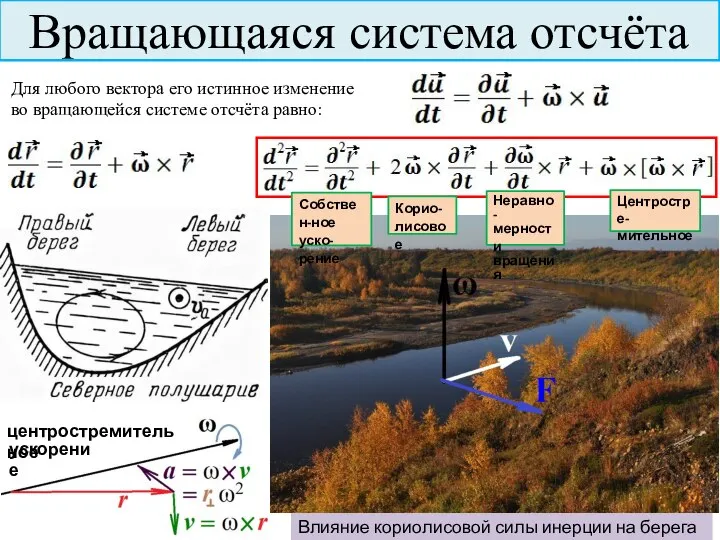
Вращающаяся система отсчёта
Для любого вектора его истинное изменение
во вращающейся системе отсчёта
Вращающаяся система отсчёта
Для любого вектора его истинное изменение
во вращающейся системе отсчёта
 Типы камер сгорания и их сравнительная оценка
Типы камер сгорания и их сравнительная оценка Масс-спектрометрия
Масс-спектрометрия Законы динамики. Уравнения движения
Законы динамики. Уравнения движения Аэродинамические характеристики самолета
Аэродинамические характеристики самолета Описание контроля качества и приёмки детали Переход
Описание контроля качества и приёмки детали Переход Физика в познании вещества, поля, пространства и времени
Физика в познании вещества, поля, пространства и времени Світло і кольори
Світло і кольори Малоканальная цифровая радиорелейная станция «Стрела 0,45»
Малоканальная цифровая радиорелейная станция «Стрела 0,45» Презентация по физике "Сила тока. Единицы силы тока" - скачать
Презентация по физике "Сила тока. Единицы силы тока" - скачать  Может ли магнит потерять свою силу
Может ли магнит потерять свою силу Посвящение в юные физики
Посвящение в юные физики Ядерные реакции под действием нейтронов. (Тема 2.6)
Ядерные реакции под действием нейтронов. (Тема 2.6) Электрический ток в различных средах
Электрический ток в различных средах Электроскоп. Проводники и непроводники. Электрическое поле
Электроскоп. Проводники и непроводники. Электрическое поле Методические рекомендации при проведении эксперимента для подготовки к ОГЭ по физике
Методические рекомендации при проведении эксперимента для подготовки к ОГЭ по физике 11 класс «Электромагнитные волны»
11 класс «Электромагнитные волны» Измерение плотности твердого тела
Измерение плотности твердого тела Механика деформируемого твердого тела. Осевые моменты. Момент инерции. Задачи
Механика деформируемого твердого тела. Осевые моменты. Момент инерции. Задачи Электроемкость. Конденсаторы. Виды соединений конденсаторов
Электроемкость. Конденсаторы. Виды соединений конденсаторов Влияние алюминия на удельную электропроводность нанокомпозитного материала на основе кремний-углеродной матрицы
Влияние алюминия на удельную электропроводность нанокомпозитного материала на основе кремний-углеродной матрицы Загрязнение воздуха отработавшими газами автомобилей
Загрязнение воздуха отработавшими газами автомобилей Кабельные и воздушные линии
Кабельные и воздушные линии Презентация по физике "Электрический ток в электролитах" - скачать
Презентация по физике "Электрический ток в электролитах" - скачать  Применение фотоэффекта в жизни
Применение фотоэффекта в жизни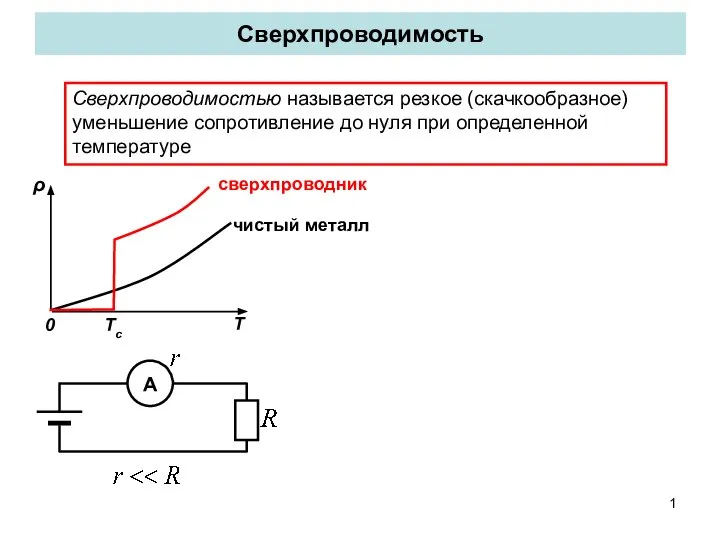 Сверхпроводимость. Криопроводники
Сверхпроводимость. Криопроводники Фонтан Герона
Фонтан Герона Сили тертя. Коефіцієнт тертя ковзання
Сили тертя. Коефіцієнт тертя ковзання Кристаллические и аморфные тела
Кристаллические и аморфные тела