- Алгоритмы удаления скрытых линий и поверхностей

Содержание
- 2. Алгоритмы удаления невидимых линий и поверхностей служат для определения линий ребер, поверхностей, которые видимы или невидимы
- 3. Нормали тетраэдра
- 4. Выделяют три класса алгоритмов удаления невидимых линий или поверхностей: Алгоритмы, работающие в объектном пространстве (3D). Алгоритмы,
- 5. Работают в физической СК, в которой описаны эти объекты. Плюсы: Точные расчеты, ограниченные только точностью вычислений.
- 6. Работают в СК изображения (экрана). Точность вычислений ограничена разрешением экрана. Полученные изображения плохо масштабируются – теряется
- 7. Применяется только для изображения множества выпуклых многогранников, представленных в виде проволочной модели. Не учитываются тени и
- 8. Идея алгоритма: 1. Удаляются из каждого объекта те ребра или грани, которые скрываются самим объектом. 2.
- 9. Для каждого объекта сцены: Вычислить уравнение плоскости для каждой грани объекта. Вычислить проекции граней. Вычислить и
- 10. Выполняется проверка: существуют ли такие отрезки, которые перекрываются другими объектами на экране. Для этого каждый оставшийся
- 11. Работает алгоритм в пространстве изображения. z-буфер - это отдельный буфер глубины, используемый для запоминания координаты z
- 12. Схема работы
- 13. 1. Заполнить буфер кадра фоновым значением интенсивности или цвета. 2. Заполнить z-буфер минимальным значением z. 3.
- 14. Недостатки алгоритма Основной недостаток алгоритма с Z-буфером - большой объем требуемой памяти. Если сцена подвергается видовому
- 15. Преимущества Прост в аппаратной реализации Разнородность использующихся примитивов – не ограничиваемся только полигонами. Нелимитированная возможная сложность
- 16. Алгоритм A-буфера Алгоритм является расширением метода буфера глубины (в названии использована противоположная от Z буква алфавита).
- 17. Описание работы Каждая позиция в А-буфере имеет два поля. - поле глубины: здесь хранится действительное значение
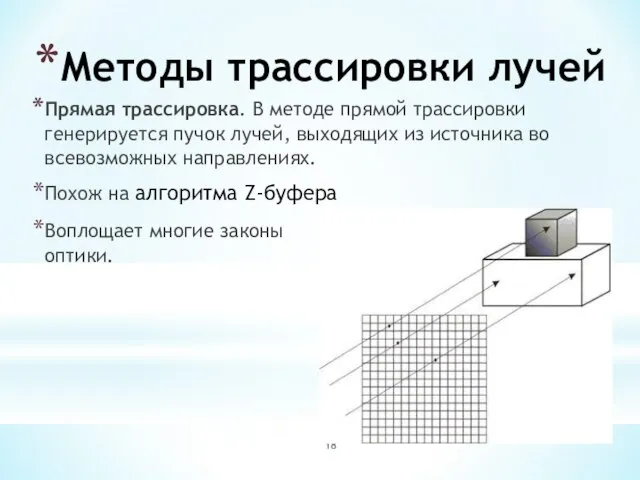
- 18. Методы трассировки лучей Прямая трассировка. В методе прямой трассировки генерируется пучок лучей, выходящих из источника во
- 19. Многоугольники сначала упорядочиваются в направлении от заднего плана к переднему. В случае, когда пары многоугольников не
- 20. Недостатки при некотором расположении граней этот алгоритм вообще не может дать правильного результата при использовании этого
- 21. Работает в пространстве изображения. В пространстве изображения рассматривается окно и решается вопрос о том, пусто ли
- 22. 1. Проекция грани полностью накрывает область (рис. d); 2. Проекция грани пересекает область, но не содержится
- 23. Сравнивая область с проекциями всех граней, можно выделить случаи, когда изображение, получающееся в рассматриваемой области, определяется
- 24. Разбиение картинной плоскости можно производить не только прямыми, параллельными координатным осям, но и по границам проекций
- 26. Скачать презентацию

Алгоритмы удаления невидимых линий и поверхностей служат для определения линий ребер,
Алгоритмы удаления невидимых линий и поверхностей служат для определения линий ребер,

Нормали тетраэдра
Нормали тетраэдра
Выделяют три класса алгоритмов удаления невидимых линий или поверхностей:
Алгоритмы, работающие в
Выделяют три класса алгоритмов удаления невидимых линий или поверхностей:
Алгоритмы, работающие в
Работают в физической СК, в которой описаны эти объекты.
Плюсы:
Точные расчеты,
Работают в физической СК, в которой описаны эти объекты.
Плюсы:
Точные расчеты,
Работают в СК изображения (экрана).
Точность вычислений ограничена разрешением экрана.
Полученные изображения плохо
Работают в СК изображения (экрана).
Точность вычислений ограничена разрешением экрана.
Полученные изображения плохо

Применяется только для изображения множества выпуклых многогранников, представленных в виде проволочной
Применяется только для изображения множества выпуклых многогранников, представленных в виде проволочной
Идея алгоритма:
1. Удаляются из каждого объекта те ребра или грани, которые
Идея алгоритма:
1. Удаляются из каждого объекта те ребра или грани, которые

Для каждого объекта сцены:
Вычислить уравнение плоскости для каждой грани объекта.
Вычислить
Для каждого объекта сцены:
Вычислить уравнение плоскости для каждой грани объекта.
Вычислить

Выполняется проверка: существуют ли такие отрезки, которые перекрываются другими объектами на
Выполняется проверка: существуют ли такие отрезки, которые перекрываются другими объектами на
Работает алгоритм в пространстве изображения.
z-буфер - это отдельный буфер глубины,
Работает алгоритм в пространстве изображения.
z-буфер - это отдельный буфер глубины,
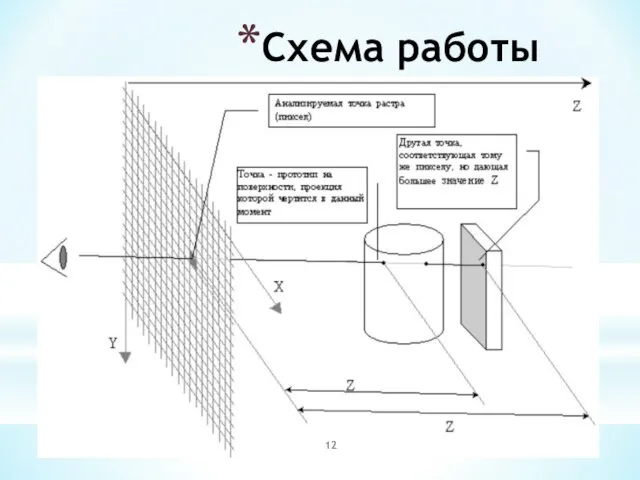
Схема работы
Схема работы

1. Заполнить буфер кадра фоновым значением интенсивности или цвета.
2. Заполнить z-буфер
1. Заполнить буфер кадра фоновым значением интенсивности или цвета.
2. Заполнить z-буфер
Недостатки алгоритма
Основной недостаток алгоритма с Z-буфером - большой объем требуемой памяти.
Недостатки алгоритма
Основной недостаток алгоритма с Z-буфером - большой объем требуемой памяти.

Преимущества
Прост в аппаратной реализации
Разнородность использующихся примитивов – не ограничиваемся только
Преимущества
Прост в аппаратной реализации
Разнородность использующихся примитивов – не ограничиваемся только
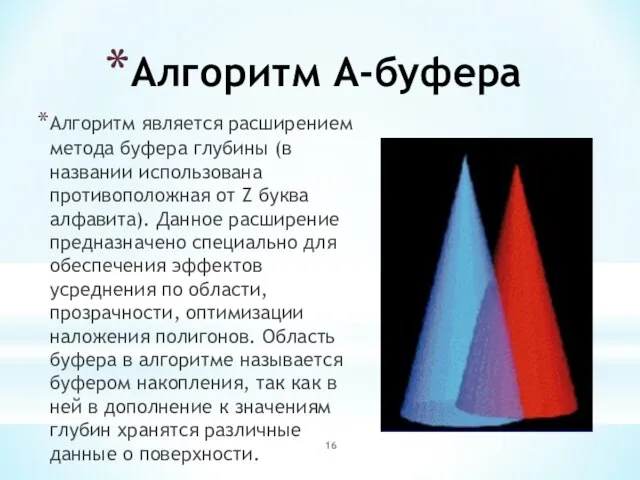
Алгоритм A-буфера
Алгоритм является расширением метода буфера глубины (в названии использована
Алгоритм A-буфера
Алгоритм является расширением метода буфера глубины (в названии использована
Описание работы
Каждая позиция в А-буфере имеет два поля. - поле глубины:
Описание работы
Каждая позиция в А-буфере имеет два поля. - поле глубины:
Методы трассировки лучей
Прямая трассировка. В методе прямой трассировки генерируется пучок лучей,
Методы трассировки лучей
Прямая трассировка. В методе прямой трассировки генерируется пучок лучей,
Многоугольники сначала упорядочиваются в направлении от заднего плана к переднему.
В
Многоугольники сначала упорядочиваются в направлении от заднего плана к переднему.
В

Недостатки
при некотором расположении граней этот алгоритм вообще не может дать правильного
Недостатки
при некотором расположении граней этот алгоритм вообще не может дать правильного

Работает в пространстве изображения.
В пространстве изображения рассматривается окно и решается
Работает в пространстве изображения.
В пространстве изображения рассматривается окно и решается
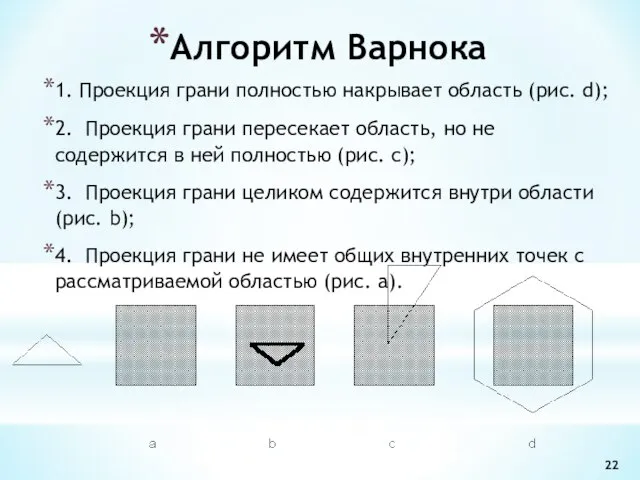
1. Проекция грани полностью накрывает область (рис. d);
2. Проекция грани пересекает
1. Проекция грани полностью накрывает область (рис. d);
2. Проекция грани пересекает

Сравнивая область с проекциями всех граней, можно выделить случаи, когда изображение,
Сравнивая область с проекциями всех граней, можно выделить случаи, когда изображение,

Разбиение картинной плоскости можно производить не только прямыми, параллельными координатным осям,
Разбиение картинной плоскости можно производить не только прямыми, параллельными координатным осям,
 Операторы определения данных
Операторы определения данных Создание сайта с помощью html
Создание сайта с помощью html Представление числовых данных в среде табличного процессора
Представление числовых данных в среде табличного процессора Презентация "Табличные информационные модели (7 класс)" - скачать презентации по Информатике
Презентация "Табличные информационные модели (7 класс)" - скачать презентации по Информатике Вычисление суммы элементов массива. (Урок 43)
Вычисление суммы элементов массива. (Урок 43) Презентация "Математические модели (7 класс)" - скачать презентации по Информатике
Презентация "Математические модели (7 класс)" - скачать презентации по Информатике Моделирование кабинета руководителя организации как объекта инженерно-технической защиты информации. Лекция 45
Моделирование кабинета руководителя организации как объекта инженерно-технической защиты информации. Лекция 45 Указатели и работа с памятью
Указатели и работа с памятью Информация и знания 6 класс - Презентация_
Информация и знания 6 класс - Презентация_ Электронные таблицы Excel 2007
Электронные таблицы Excel 2007 О внедрении информационной системы сопровождения процесса перевода обучающихся с платной основы обучения на бюджетную
О внедрении информационной системы сопровождения процесса перевода обучающихся с платной основы обучения на бюджетную Устройство компьютера 7 класс
Устройство компьютера 7 класс Презентация "Вычислительные таблицы (7 класс)" - скачать презентации по Информатике
Презентация "Вычислительные таблицы (7 класс)" - скачать презентации по Информатике Дизайн интернет-СМИ
Дизайн интернет-СМИ Проектирование компонента сбора статистики о функциональности баз данных
Проектирование компонента сбора статистики о функциональности баз данных Игра Fortnite
Игра Fortnite Обработка исключительных ситуаций
Обработка исключительных ситуаций Архивирование и сжатие файлов
Архивирование и сжатие файлов Історія інформатики
Історія інформатики The transformation of the blog in the publications: analysis blook phenomenon in the domestic and foreign social media
The transformation of the blog in the publications: analysis blook phenomenon in the domestic and foreign social media Steps in Normalization
Steps in Normalization ABBYY Lingvo
ABBYY Lingvo Python. Линейный алгоритм. 9 класс
Python. Линейный алгоритм. 9 класс Advanced Concepts and Long Term Vision
Advanced Concepts and Long Term Vision Инструкция по обновлению навигационного ПО Sonata LFFL Навител 9-9 карты 2019q1
Инструкция по обновлению навигационного ПО Sonata LFFL Навител 9-9 карты 2019q1 Табличний процесор Microsoft Excel. Тема 1: Основи роботи в середовищі Microsoft Excel
Табличний процесор Microsoft Excel. Тема 1: Основи роботи в середовищі Microsoft Excel Основные понятия криптографии
Основные понятия криптографии МУЗЫКАЛЬНЫЙ ОПЕРАТОР PLAY (Среда программирования QBASIC) Тема урока:
МУЗЫКАЛЬНЫЙ ОПЕРАТОР PLAY (Среда программирования QBASIC) Тема урока: