- Динамическое программирование

Содержание
- 2. 1. Основные понятия Динамическое программирование (иначе - динамическое планирование) - это метод нахождения оптимальных решений в
- 3. Естественным шагом в них может быть год, квартал, месяц, декада, неделя, день и т. д. Однако
- 4. В экономической практике встречается несколько типов задач, которые по постановке или способу решения относятся к задачам
- 5. Их решают либо путем составления комплекса взаимосвязанных статических моделей для каждого периода, либо путем составления единой
- 6. Рассмотрим несколько типичных задач, для решения которых естественным является применение метода динамического программирования.
- 7. Задача перспективного планирования. Планируется деятельность группы N промышленных предприятий Пi (i = 1,…, N) на период
- 8. Каждое предприятие за год приносит доход, зависящий от вложенных средств, часть которого отчисляется в фонд предприятий.
- 9. Здесь процесс принятия решения разбивается на Т шагов. Управление им заключается в начальном распределении и последующих
- 10. В свою очередь состояние каждого предприятия хit является вектором, компонентами которого служат трудовые ресурсы, основные фонды,
- 11. Целевой функцией будет суммарная прибыль объединения за Т лет. Если zt — прибыль за t-й год,
- 12. Задача об оптимальном управлении поставками. В различных областях народного хозяйства возникает задача определения момента подачи партии
- 13. Пусть Т - промежуток планирования. Обозначим через νt интенсивность потребления ресурса в t-м интервале. Состояние системы
- 14. Очевидно, что вектор управления есть функция состояния на начало интервала. Из множества возможных управлений требуется выбрать
- 15. 2.Особенности задач динамического программирования 1. Рассматривается система, состояние которой на каждом шаге определяется вектором xt. Дальнейшее
- 16. 2. На каждом шаге выбирается одно решение ut, под действием которого система переходит из предыдущего состояния
- 17. 3. Действие на каждом шаге связано с определенным выигрышем (доходом, прибылью) или потерей (издержками), которые зависят
- 18. 5. Требуется найти такое допустимое управление ut для каждого шага t, чтобы получить экстремальное значение функции
- 19. Любую допустимую последовательность действий для каждого шага, переводящую систему из начального состояния в конечное, называют стратегией
- 21. Скачать презентацию
1. Основные понятия
Динамическое программирование (иначе - динамическое планирование) - это метод
1. Основные понятия
Динамическое программирование (иначе - динамическое планирование) - это метод
Естественным шагом в них может быть год, квартал, месяц, декада, неделя,
Естественным шагом в них может быть год, квартал, месяц, декада, неделя,
В экономической практике встречается несколько типов задач, которые по постановке или
В экономической практике встречается несколько типов задач, которые по постановке или
Их решают либо путем составления комплекса взаимосвязанных статических моделей для каждого
Их решают либо путем составления комплекса взаимосвязанных статических моделей для каждого
Рассмотрим несколько типичных задач, для решения которых естественным является применение метода
Рассмотрим несколько типичных задач, для решения которых естественным является применение метода
Задача перспективного планирования. Планируется деятельность группы N промышленных предприятий Пi (i
Задача перспективного планирования. Планируется деятельность группы N промышленных предприятий Пi (i
Каждое предприятие за год приносит доход, зависящий от вложенных средств, часть
Каждое предприятие за год приносит доход, зависящий от вложенных средств, часть
Здесь процесс принятия решения разбивается на Т шагов. Управление им заключается
Здесь процесс принятия решения разбивается на Т шагов. Управление им заключается
В свою очередь состояние каждого предприятия хit является вектором, компонентами которого
В свою очередь состояние каждого предприятия хit является вектором, компонентами которого
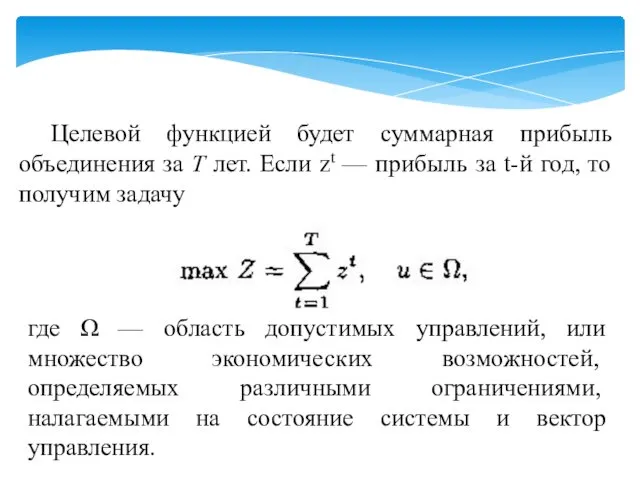
Целевой функцией будет суммарная прибыль объединения за Т лет. Если zt
Целевой функцией будет суммарная прибыль объединения за Т лет. Если zt
Задача об оптимальном управлении поставками. В различных областях народного хозяйства возникает
Задача об оптимальном управлении поставками. В различных областях народного хозяйства возникает
Пусть Т - промежуток планирования. Обозначим через νt интенсивность потребления ресурса
Пусть Т - промежуток планирования. Обозначим через νt интенсивность потребления ресурса
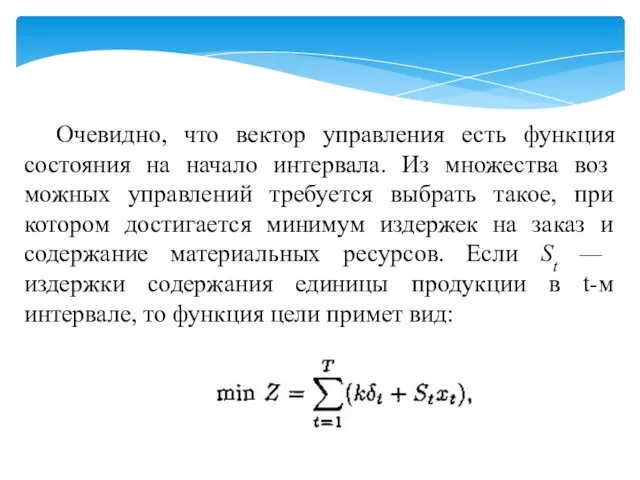
Очевидно, что вектор управления есть функция состояния на начало интервала. Из
Очевидно, что вектор управления есть функция состояния на начало интервала. Из
2.Особенности задач динамического программирования
1. Рассматривается система, состояние которой на каждом шаге
2.Особенности задач динамического программирования
1. Рассматривается система, состояние которой на каждом шаге
2. На каждом шаге выбирается одно решение ut, под действием которого
2. На каждом шаге выбирается одно решение ut, под действием которого
3. Действие на каждом шаге связано с определенным выигрышем (доходом, прибылью)
3. Действие на каждом шаге связано с определенным выигрышем (доходом, прибылью)
5. Требуется найти такое допустимое управление ut для каждого шага t,
5. Требуется найти такое допустимое управление ut для каждого шага t,
Любую допустимую последовательность действий для каждого шага, переводящую систему из начального
Любую допустимую последовательность действий для каждого шага, переводящую систему из начального
 Системное программирование
Системное программирование Разработка информационной системы аэропорт
Разработка информационной системы аэропорт Создание комфортного интерьера комнаты
Создание комфортного интерьера комнаты TLB – Top Level Baseline
TLB – Top Level Baseline Основные понятия объектно-ориентированного подхода
Основные понятия объектно-ориентированного подхода Порядок работы с шифром простой замены на примере рассказа Артура Конан Дойля Пляшущие человечки
Порядок работы с шифром простой замены на примере рассказа Артура Конан Дойля Пляшущие человечки Типы 1 задания ОГЭ по информатики
Типы 1 задания ОГЭ по информатики Открытый стандарт Open MP
Открытый стандарт Open MP Инструкция по игре
Инструкция по игре Excel. Ссылки, диаграммы. Подготовка к ГИА 2011 Заблоцкая И.А. Учитель информатики и ИКТ МАОУ «Лицей № 36»
Excel. Ссылки, диаграммы. Подготовка к ГИА 2011 Заблоцкая И.А. Учитель информатики и ИКТ МАОУ «Лицей № 36»  Инструкция для поисковиков по приложению Оберег
Инструкция для поисковиков по приложению Оберег Оформление страниц CSS
Оформление страниц CSS Наукове дослідження: Контент сучасного журналу в Україні
Наукове дослідження: Контент сучасного журналу в Україні Онлайн или не онлайн – вот в чем вопрос
Онлайн или не онлайн – вот в чем вопрос Великие ученые. Информатика
Великие ученые. Информатика Константы. Оператор if. Оператор switch
Константы. Оператор if. Оператор switch Системные блоки
Системные блоки  Схемотехника логических элементов
Схемотехника логических элементов Презентация "«Двумерные массивы»" - скачать презентации по Информатике
Презентация "«Двумерные массивы»" - скачать презентации по Информатике Информационная культура как средство повышения качества современного урока разработана учителем математики ГОУ СОШ №949 Павлов
Информационная культура как средство повышения качества современного урока разработана учителем математики ГОУ СОШ №949 Павлов Архитектура ЭВМ
Архитектура ЭВМ Обработка массивов
Обработка массивов Математическое выражение
Математическое выражение Автоматическая генерация текста с помощью нейронных сетей
Автоматическая генерация текста с помощью нейронных сетей Услуги в в электронном виде
Услуги в в электронном виде Базы данных в электронных таблицах
Базы данных в электронных таблицах Мем – новый способ общения
Мем – новый способ общения Traffic Engineering. (Лекция 3)
Traffic Engineering. (Лекция 3)