- Основы программирования в среде Robolab 2.9

Содержание
- 2. Команды управления моторами В версии 2.5.4 мощность моторов измеряется от 1 до 5, направление отдельно В
- 3. Объекты данных и их значения В Robolab различается объект данных и его значение Объектом данных может
- 4. Модификаторы Параметры выполнения команд, которые определяют: Порт подключенного устройства Мощность мотора Ожидаемое значение датчика Задаваемое значение
- 5. Выражения в Robolab 2.9 В версии 2.9.4 появился полноценный математический аппарат Типы данных: int, float Переменные
- 6. Помощь Контекстная подсказка (при наведении курсора) Ctrl-H Текстовое описание с внутренней структурой – двойной щелчок по
- 8. Скачать презентацию

Команды управления моторами
В версии 2.5.4 мощность моторов измеряется от 1 до
Команды управления моторами
В версии 2.5.4 мощность моторов измеряется от 1 до
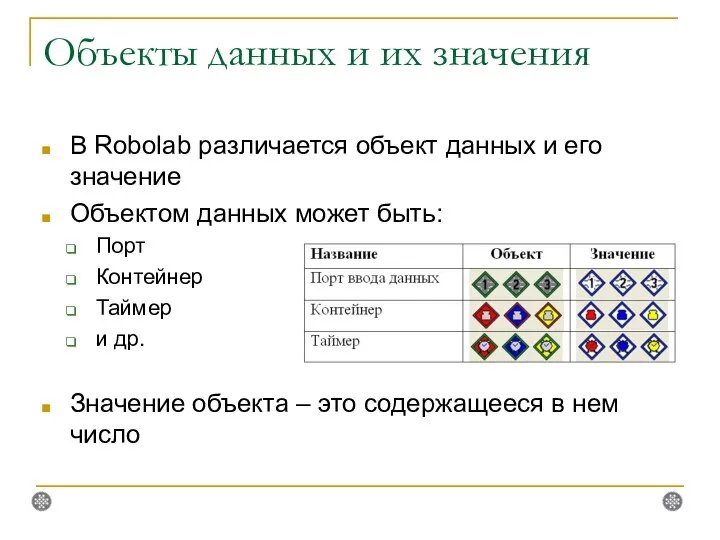
Объекты данных и их значения
В Robolab различается объект данных и его
Объекты данных и их значения
В Robolab различается объект данных и его

Модификаторы
Параметры выполнения команд, которые определяют:
Порт подключенного устройства
Мощность мотора
Ожидаемое значение датчика
Задаваемое значение
Модификаторы
Параметры выполнения команд, которые определяют:
Порт подключенного устройства
Мощность мотора
Ожидаемое значение датчика
Задаваемое значение
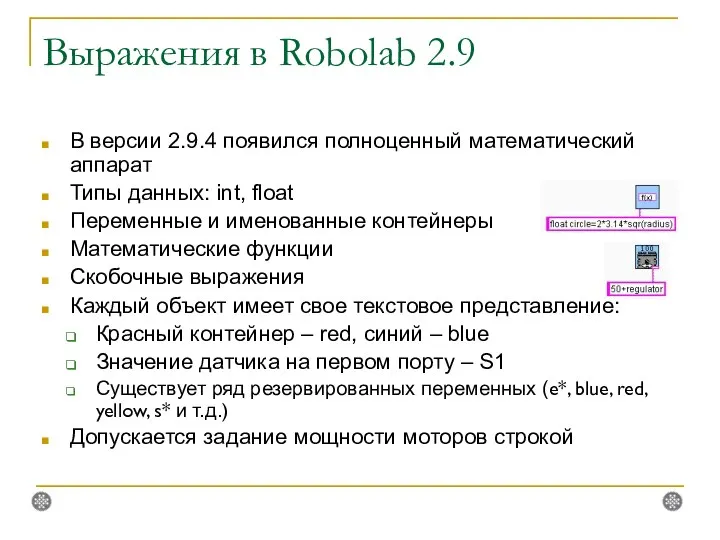
Выражения в Robolab 2.9
В версии 2.9.4 появился полноценный математический аппарат
Типы данных:
Выражения в Robolab 2.9
В версии 2.9.4 появился полноценный математический аппарат
Типы данных:
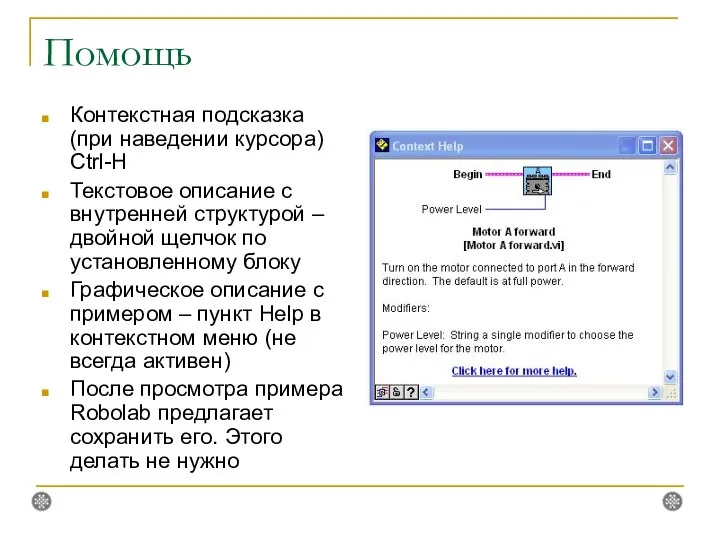
Помощь
Контекстная подсказка (при наведении курсора) Ctrl-H
Текстовое описание с внутренней структурой –
Помощь
Контекстная подсказка (при наведении курсора) Ctrl-H
Текстовое описание с внутренней структурой –
 Урок «Путешествие по островам клавиатуры» Методист МОУ ДПО "РИММЦ" Кунгурского района Панова Екатерина Николаевна Препода
Урок «Путешествие по островам клавиатуры» Методист МОУ ДПО "РИММЦ" Кунгурского района Панова Екатерина Николаевна Препода Приложение к уроку Учитель: Варушкина Ю.А. МОУ Гимназия
Приложение к уроку Учитель: Варушкина Ю.А. МОУ Гимназия  Схема участия в электронных торгах
Схема участия в электронных торгах Презентация "124" - скачать презентации по Информатике
Презентация "124" - скачать презентации по Информатике Sampling in 1D
Sampling in 1D Сжатие информации Алгоритм Хаффмана
Сжатие информации Алгоритм Хаффмана Анализ данных в реляционных БД на примере СУБД MS Access. Создание запросов, изменяющих таблицы. Создание отчетов
Анализ данных в реляционных БД на примере СУБД MS Access. Создание запросов, изменяющих таблицы. Создание отчетов Киберпреступность
Киберпреступность АСУП – основные черты
АСУП – основные черты Презентация "Поколения ЭВМ" - скачать презентации по Информатике
Презентация "Поколения ЭВМ" - скачать презентации по Информатике Электронные ресурсы и детская литература
Электронные ресурсы и детская литература Перестановка и сортировка элементов массива
Перестановка и сортировка элементов массива Строковый тип данных
Строковый тип данных Программирование (Python)
Программирование (Python) Библиотечная профессия
Библиотечная профессия Разработка web-приложений p2p. Обмен данными в распределенных сетях
Разработка web-приложений p2p. Обмен данными в распределенных сетях Правила техники безопасности в походе
Правила техники безопасности в походе Основные понятия баз данных
Основные понятия баз данных Алгоритм. Свойства и формы
Алгоритм. Свойства и формы Электронные носители информации
Электронные носители информации Презентация "Логические основы компьютеров" - скачать презентации по Информатике
Презентация "Логические основы компьютеров" - скачать презентации по Информатике Вытесняющие и не вытесняющие алгоритмы диспетчеризации
Вытесняющие и не вытесняющие алгоритмы диспетчеризации Веб-аналитика: что это такое, зачем она нужна, сервисы веб-аналитики
Веб-аналитика: что это такое, зачем она нужна, сервисы веб-аналитики Файловая система
Файловая система кл информатика Есипенко Р.М
кл информатика Есипенко Р.М Приложение для регистрации обращений BPM-Client
Приложение для регистрации обращений BPM-Client Измерение и кодирование информации Справочные сведения Решение типовых задач
Измерение и кодирование информации Справочные сведения Решение типовых задач Построение базы данных
Построение базы данных