- Построение графиков полярных кривых в Visual Basic

Содержание
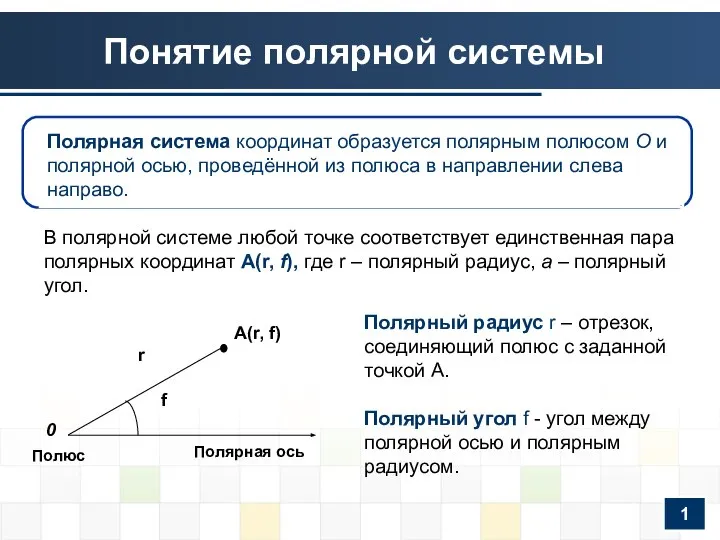
- 2. Понятие полярной системы Полярный радиус r – отрезок, соединяющий полюс с заданной точкой А. Полярный угол
- 3. Переход от полярной системы координат к декартовой Формулы обратного перехода от декартовых координат к полярным: Формулы
- 4. Построение графиков полярных кривых в Visual Basic Задание Создать проект в среде Visual Basic для построения
- 5. Интерфейс проекта 4
- 6. Свойства элементов управления Option1(5) Option1(0) 5
- 7. Свойства элементов управления 6
- 8. Описание переменных Dim z, k As Integer, f, pi, a, r, b, q As Single, i
- 9. Процедура выбора типа кривой Анализируем значение свойства Value каждого переключателя. Private Sub Option1_Click(Index As Integer) ‘в
- 10. Процедура кнопки Пуск Private Sub Command1_Click() ‘шкала Picture1.Scale (-10, 10)-(10, -10) ‘оси координат Picture1.Line (-10, 0)-(10,
- 11. Кардиоида Параметрические уравнения r = a * (1 + Cos(f)) x = r * Cos(f) y
- 12. Построение графика кардиоиды If z = 0 Then a = 4: q = 4: f =
- 13. Построение графика кардиоиды ‘Вывод параметрических уравнений в текстовое поле Text1.Text = Text1.Text & "r = a
- 14. Процедура кнопки Сброс Private Sub Command3_Click() Picture1.Cls Picture1.Line (-10, 0)-(10, 0), QBColor(0) Picture1.Line (0, 10)-(0, -10),
- 15. Логарифмическая спираль Параметрические уравнения a = 0.2 b = 0.15 n = 5 r = a
- 16. Декартов лист Параметрические уравнения a = 4 r = 3 * a * Cos(f) * Sin(f)
- 17. Фигура Лиссажу Параметрические уравнения r = 5 x = r * Cos(3 * f) y =
- 18. K-лепестковая роза Параметрические уравнения При чётных значениях k получается 2*k-лепестковая роза, а при нечётных значениях –
- 19. Эпициклоида Параметрические уравнения x = (a + b) * Cos(f) - a * Cos((a + b)
- 20. 1. Добавьте в проект кнопку Движение (Command4). Реализовать движение объекта (окружности) по траектории окружности радиуса R.
- 21. Задания для самостоятельной работы 2. Добавьте в проект элемент управления ползунок Slider (Проект – Компоненты -
- 22. Задания для самостоятельной работы ‘процедура кнопки Скорость Private Sub Command5_Click() v= Slider1 .Value End Sub ‘переменную
- 24. Скачать презентацию
Понятие полярной системы
Полярный радиус r – отрезок, соединяющий полюс с заданной
Понятие полярной системы
Полярный радиус r – отрезок, соединяющий полюс с заданной
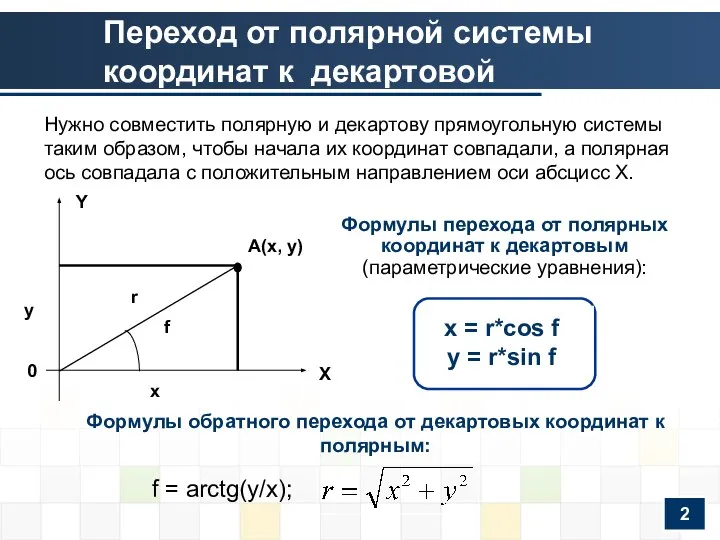
Переход от полярной системы координат к декартовой
Формулы обратного перехода от
Переход от полярной системы координат к декартовой
Формулы обратного перехода от
Построение графиков полярных кривых в Visual Basic
Задание
Создать проект в среде Visual
Построение графиков полярных кривых в Visual Basic
Задание
Создать проект в среде Visual
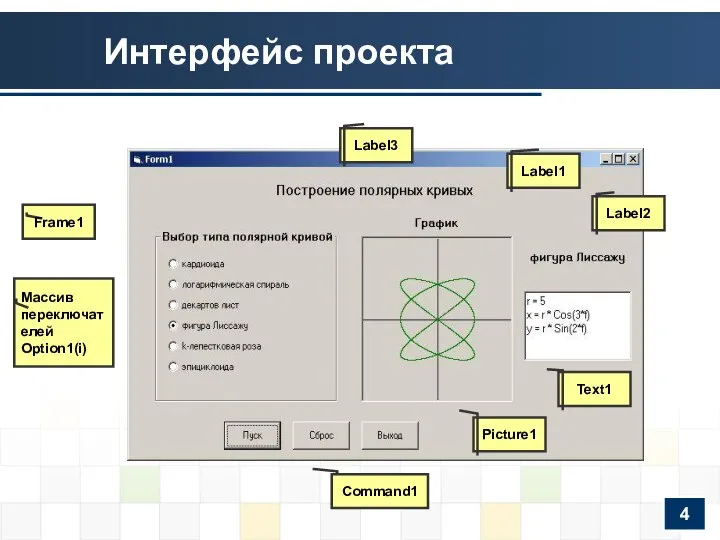
Интерфейс проекта
4
Интерфейс проекта
4
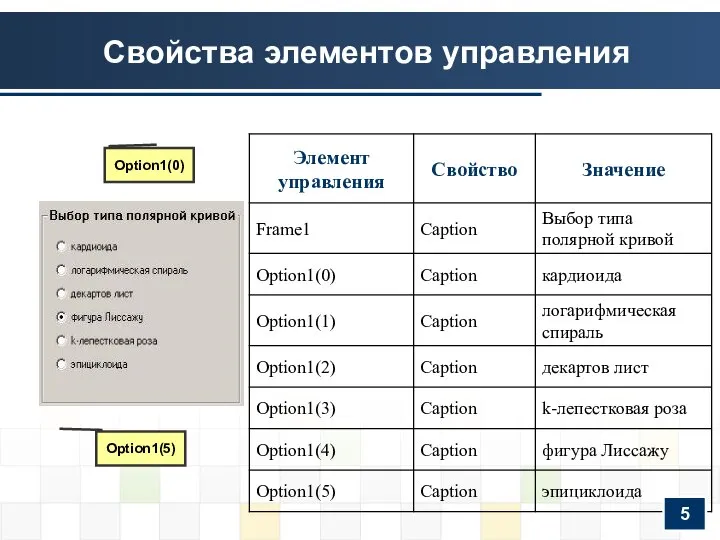
Свойства элементов управления
Option1(5)
Option1(0)
5
Свойства элементов управления
Option1(5)
Option1(0)
5
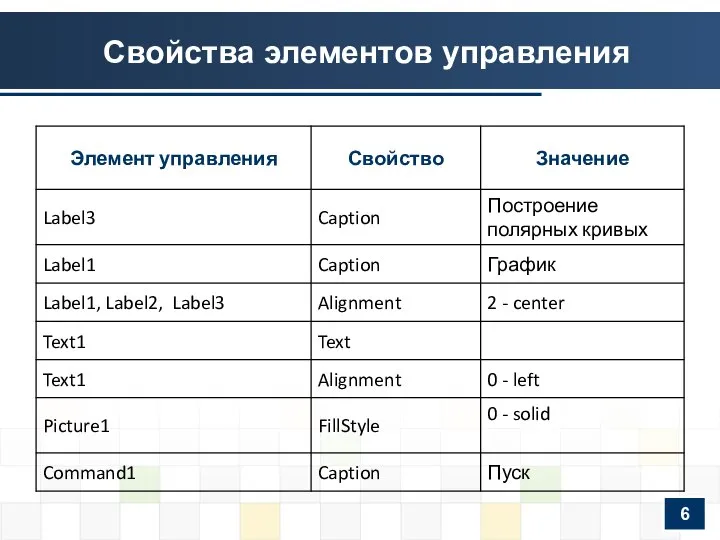
Свойства элементов управления
6
Свойства элементов управления
6
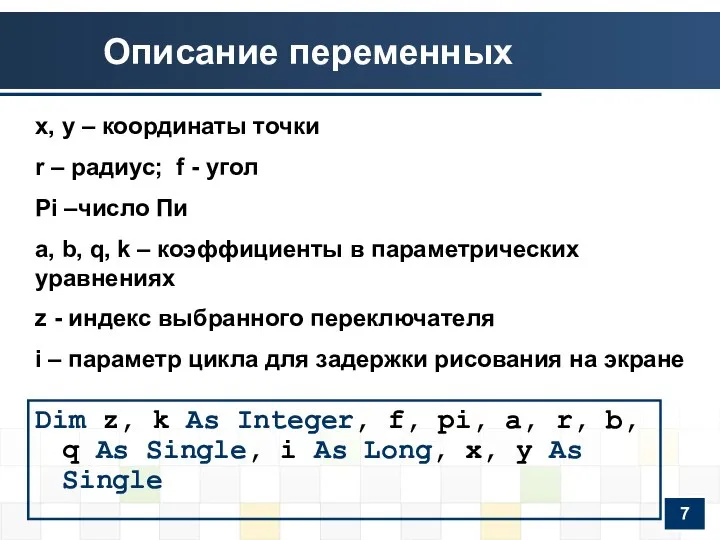
Описание переменных
Dim z, k As Integer, f, pi, a, r, b,
Описание переменных
Dim z, k As Integer, f, pi, a, r, b,
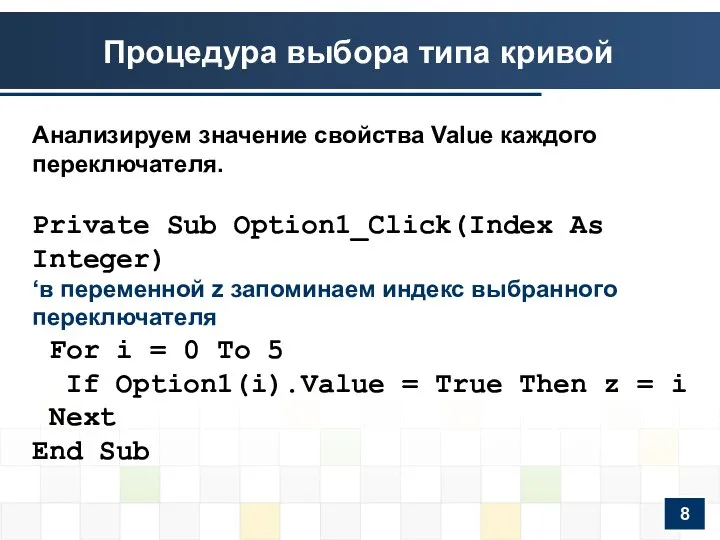
Процедура выбора типа кривой
Анализируем значение свойства Value каждого переключателя.
Private Sub Option1_Click(Index
Процедура выбора типа кривой
Анализируем значение свойства Value каждого переключателя.
Private Sub Option1_Click(Index
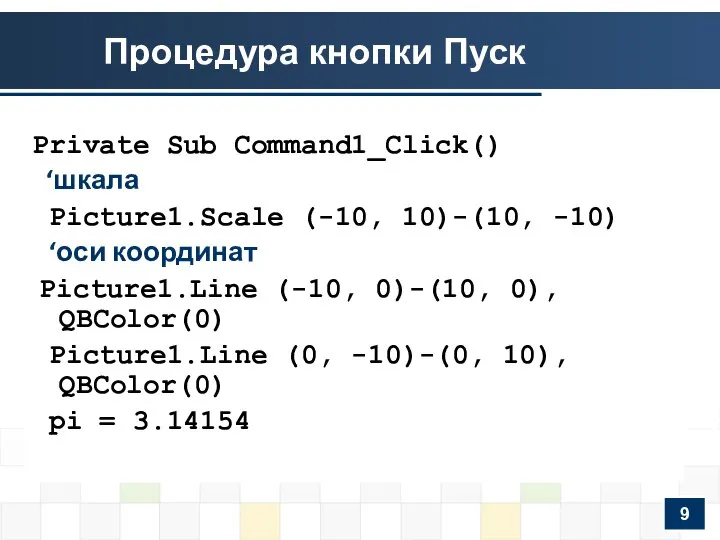
Процедура кнопки Пуск
Private Sub Command1_Click()
‘шкала
Picture1.Scale (-10, 10)-(10, -10)
Процедура кнопки Пуск
Private Sub Command1_Click()
‘шкала
Picture1.Scale (-10, 10)-(10, -10)
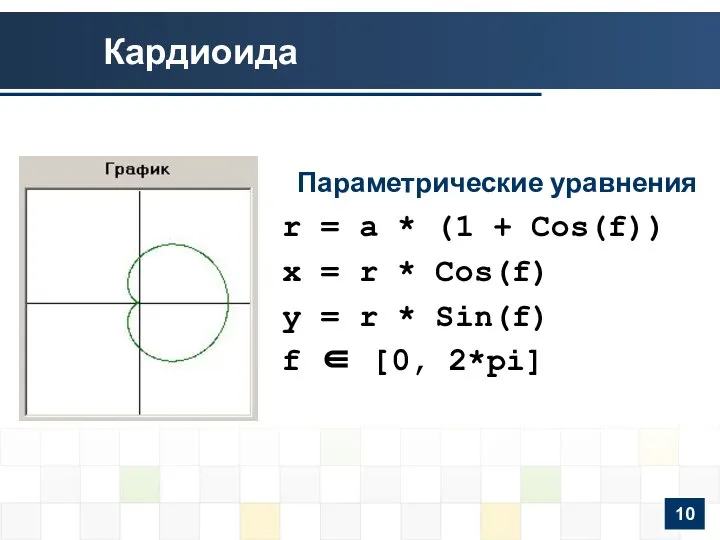
Кардиоида
Параметрические уравнения
r = a * (1 + Cos(f))
x = r *
Кардиоида
Параметрические уравнения
r = a * (1 + Cos(f))
x = r *
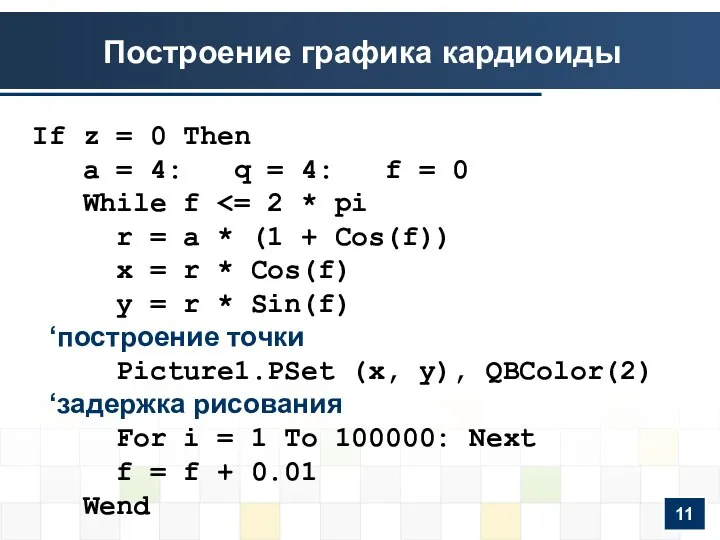
Построение графика кардиоиды
If z = 0 Then
a = 4:
Построение графика кардиоиды
If z = 0 Then
a = 4:
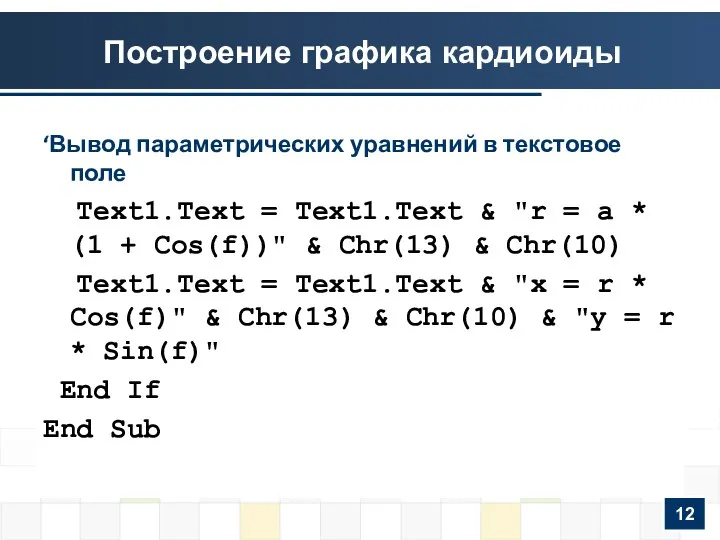
Построение графика кардиоиды
‘Вывод параметрических уравнений в текстовое поле
Text1.Text = Text1.Text
Построение графика кардиоиды
‘Вывод параметрических уравнений в текстовое поле
Text1.Text = Text1.Text
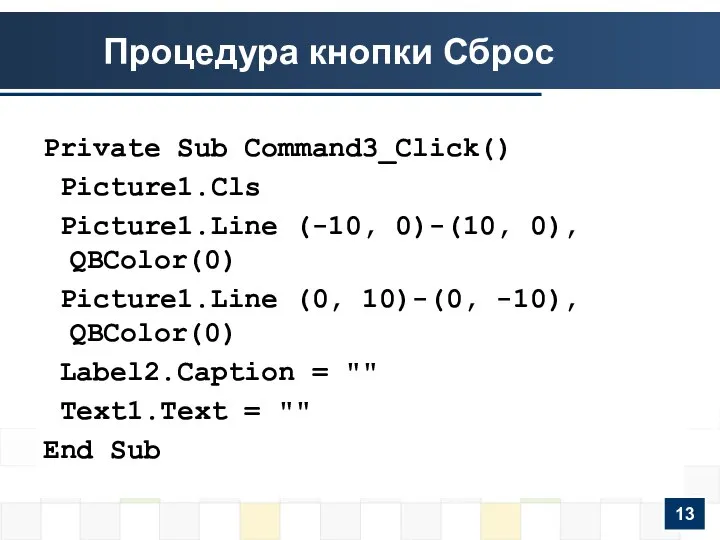
Процедура кнопки Сброс
Private Sub Command3_Click()
Picture1.Cls
Picture1.Line (-10, 0)-(10, 0), QBColor(0)
Процедура кнопки Сброс
Private Sub Command3_Click()
Picture1.Cls
Picture1.Line (-10, 0)-(10, 0), QBColor(0)
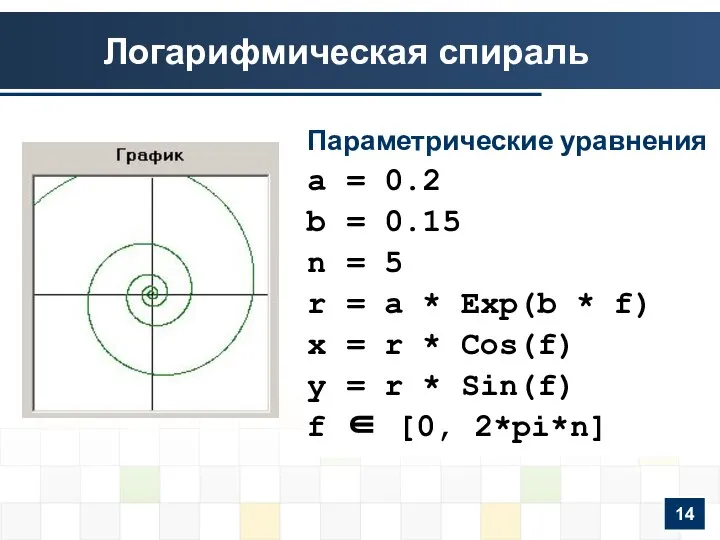
Логарифмическая спираль
Параметрические уравнения
a = 0.2
b = 0.15
n = 5
r = a
Логарифмическая спираль
Параметрические уравнения
a = 0.2
b = 0.15
n = 5
r = a
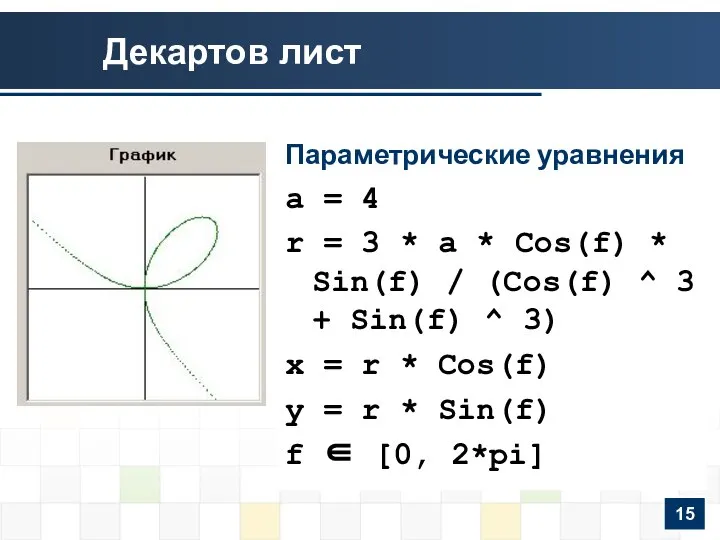
Декартов лист
Параметрические уравнения
a = 4
r = 3 * a *
Декартов лист
Параметрические уравнения
a = 4
r = 3 * a *
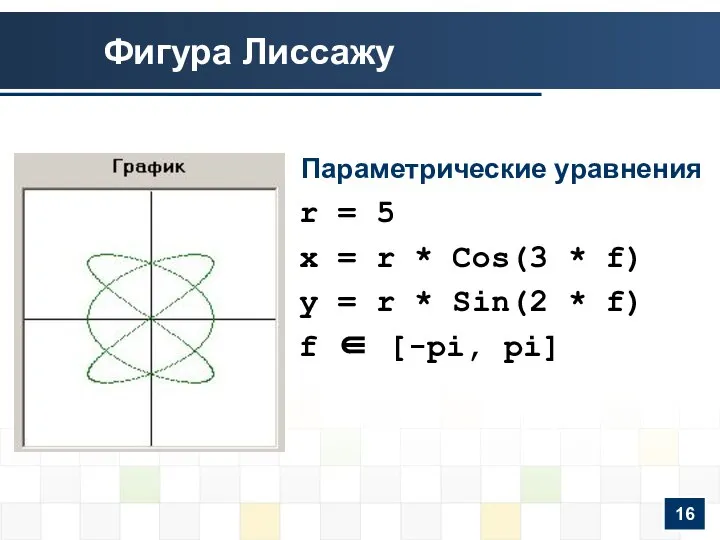
Фигура Лиссажу
Параметрические уравнения
r = 5
x = r * Cos(3 * f)
y
Фигура Лиссажу
Параметрические уравнения
r = 5
x = r * Cos(3 * f)
y
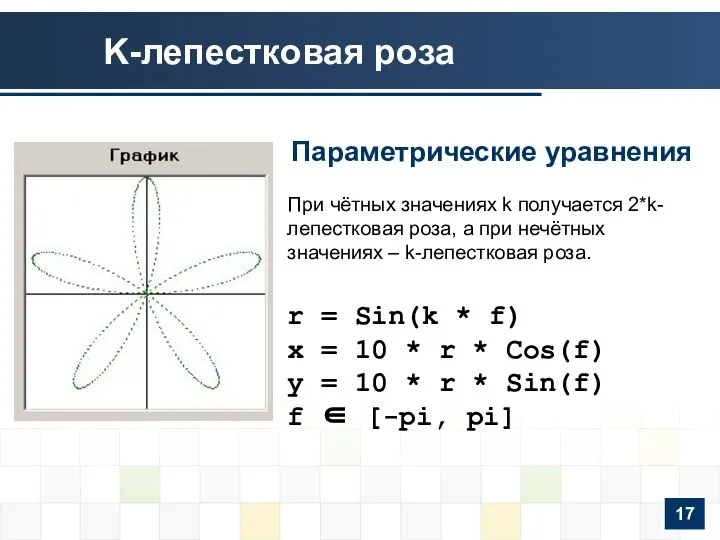
K-лепестковая роза
Параметрические уравнения
При чётных значениях k получается 2*k-лепестковая роза, а
K-лепестковая роза
Параметрические уравнения
При чётных значениях k получается 2*k-лепестковая роза, а
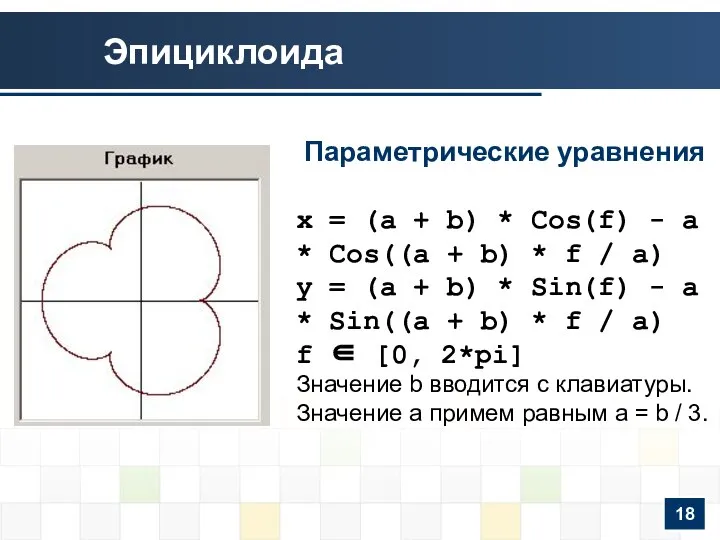
Эпициклоида
Параметрические уравнения
x = (a + b) * Cos(f) - a *
Эпициклоида
Параметрические уравнения
x = (a + b) * Cos(f) - a *
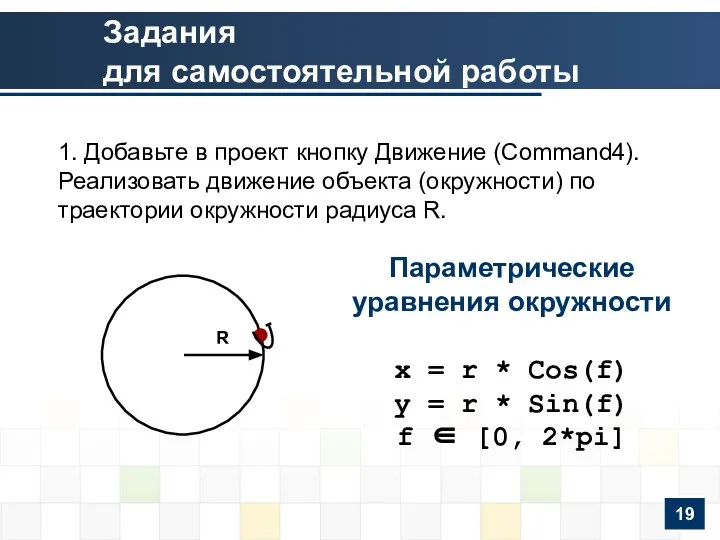
1. Добавьте в проект кнопку Движение (Command4). Реализовать движение объекта (окружности)
1. Добавьте в проект кнопку Движение (Command4). Реализовать движение объекта (окружности)
Задания
для самостоятельной работы
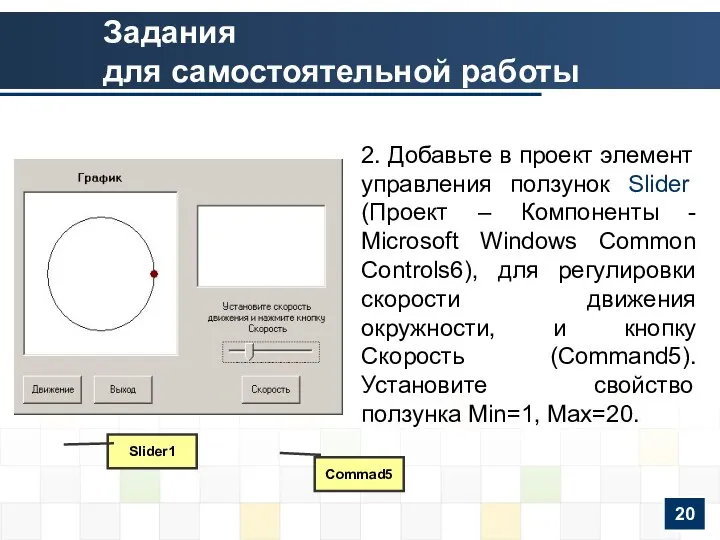
2. Добавьте в проект элемент управления ползунок Slider (Проект
Задания
для самостоятельной работы
2. Добавьте в проект элемент управления ползунок Slider (Проект
Задания
для самостоятельной работы
‘процедура кнопки Скорость
Private Sub Command5_Click()
v= Slider1 .Value
End
Задания
для самостоятельной работы
‘процедура кнопки Скорость
Private Sub Command5_Click()
v= Slider1 .Value
End
 Поиск файлов и папок
Поиск файлов и папок Компьютерные языки разметки
Компьютерные языки разметки Интернет мошенничество и методы противодействия
Интернет мошенничество и методы противодействия Антивирус Касперского. Personal Pro
Антивирус Касперского. Personal Pro Неопубликованные документы
Неопубликованные документы Математическое моделирование
Математическое моделирование Интеграция с государственной автоматизированной системой «Управление»
Интеграция с государственной автоматизированной системой «Управление» Основы моделирования
Основы моделирования  Компьютер. Win7
Компьютер. Win7 Кроссворд по теме «Компьютерные устройства»
Кроссворд по теме «Компьютерные устройства» Лекция 2 Виды алгоритмов. Запись алгоритмов с помощью блок-схем
Лекция 2 Виды алгоритмов. Запись алгоритмов с помощью блок-схем Компьютер как универсальное устройство для работы с информацией
Компьютер как универсальное устройство для работы с информацией Программирование и алгоритмизация. Основы программирования
Программирование и алгоритмизация. Основы программирования Единица измерения. Содержательный и алфавитный подход к измерению информации. Урок №3
Единица измерения. Содержательный и алфавитный подход к измерению информации. Урок №3 Проектирование запросов по заданиям самостоятельной работы (вид конструктора запросов)
Проектирование запросов по заданиям самостоятельной работы (вид конструктора запросов) Улучшенный вариант макросов MoveHim и MoveTo для скачкообразного перемещения объектов в режиме демонстрации
Улучшенный вариант макросов MoveHim и MoveTo для скачкообразного перемещения объектов в режиме демонстрации Текстовый редактор (процессор) Microsoft Word Основные возможности и назначение
Текстовый редактор (процессор) Microsoft Word Основные возможности и назначение  Программное обеспечение компьютера
Программное обеспечение компьютера Презентация "Конструирование из мозаики" - скачать презентации по Информатике
Презентация "Конструирование из мозаики" - скачать презентации по Информатике Test-driven development
Test-driven development Строки как одномерные массивы данных типа char (терминальные строки)
Строки как одномерные массивы данных типа char (терминальные строки) Глобальные информационные сети
Глобальные информационные сети  История возникновения электронной почты. Создание собственного электронного ящика на yandex.ru Кайгородцев Ярослав Александрович
История возникновения электронной почты. Создание собственного электронного ящика на yandex.ru Кайгородцев Ярослав Александрович  Циклы PHP. (Лекция 6)
Циклы PHP. (Лекция 6) Устройство компьютера Знакомство с компьютером
Устройство компьютера Знакомство с компьютером  Создание мобильных приложений с помощью среды программирования MIT App Inventor
Создание мобильных приложений с помощью среды программирования MIT App Inventor Apps on the go
Apps on the go Системное програмное обеспечение
Системное програмное обеспечение