- Презентация "MSC.Dytran - 12" - скачать презентации по Информатике

Содержание
- 2. СОДЕРЖАНИЕ Что такое контакт Контакт типа Master – Slave Контакт типа Single Surface (самоконтакт) Адаптивный контакт
- 3. ЧТО ТАКОЕ КОНТАКТ Контакт – это взаимодействие между узлами и/или элементами лагранжевой конечно-элементной сетки Три типа
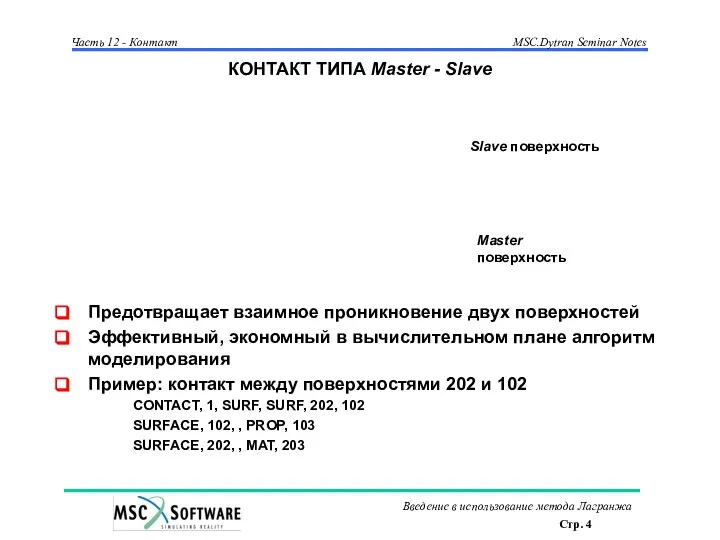
- 4. КОНТАКТ ТИПА Master - Slave Предотвращает взаимное проникновение двух поверхностей Эффективный, экономный в вычислительном плане алгоритм
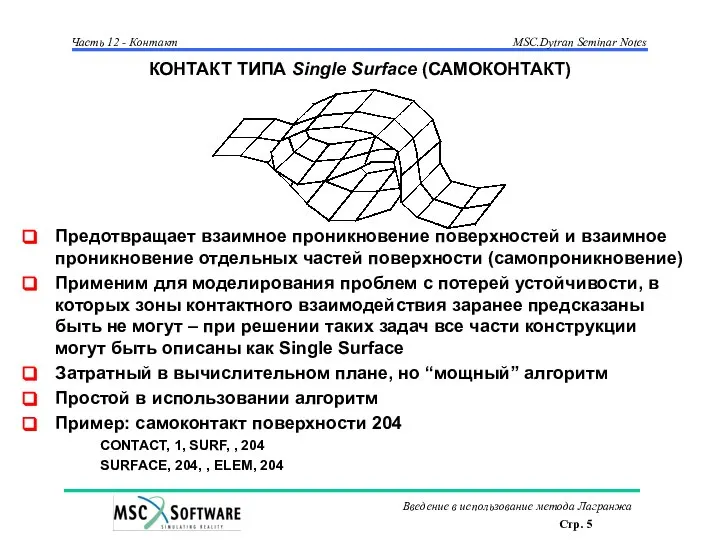
- 5. КОНТАКТ ТИПА Single Surface (САМОКОНТАКТ) Предотвращает взаимное проникновение поверхностей и взаимное проникновение отдельных частей поверхности (самопроникновение)
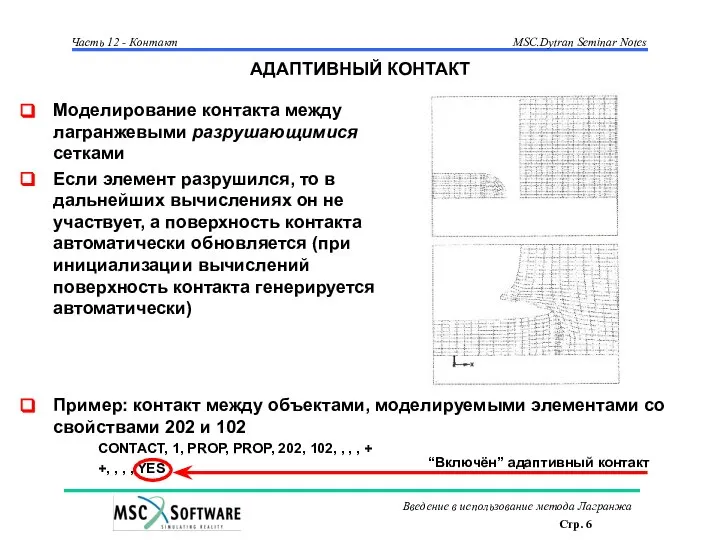
- 6. АДАПТИВНЫЙ КОНТАКТ Пример: контакт между объектами, моделируемыми элементами со свойствами 202 и 102 CONTACT, 1, PROP,
- 7. МЕТОД МОДЕЛИРОВАНИЯ КОНТАКТА Контакт моделируется с использованием метода штрафов Допускается проникновение узлов в “сопредельную” поверхность Силы,
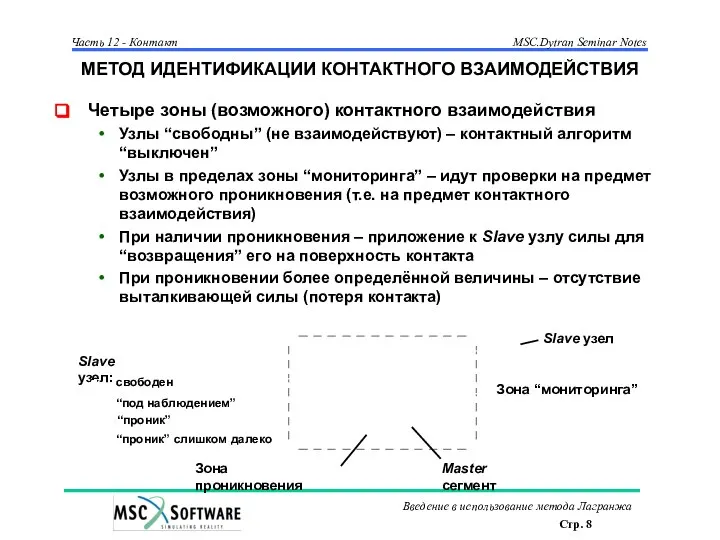
- 8. МЕТОД ИДЕНТИФИКАЦИИ КОНТАКТНОГО ВЗАИМОДЕЙСТВИЯ Четыре зоны (возможного) контактного взаимодействия Узлы “свободны” (не взаимодействуют) – контактный алгоритм
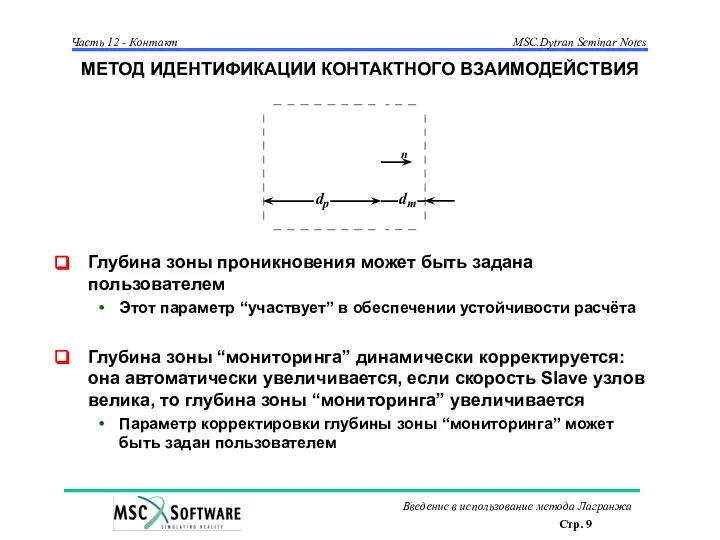
- 9. МЕТОД ИДЕНТИФИКАЦИИ КОНТАКТНОГО ВЗАИМОДЕЙСТВИЯ Глубина зоны проникновения может быть задана пользователем Этот параметр “участвует” в обеспечении
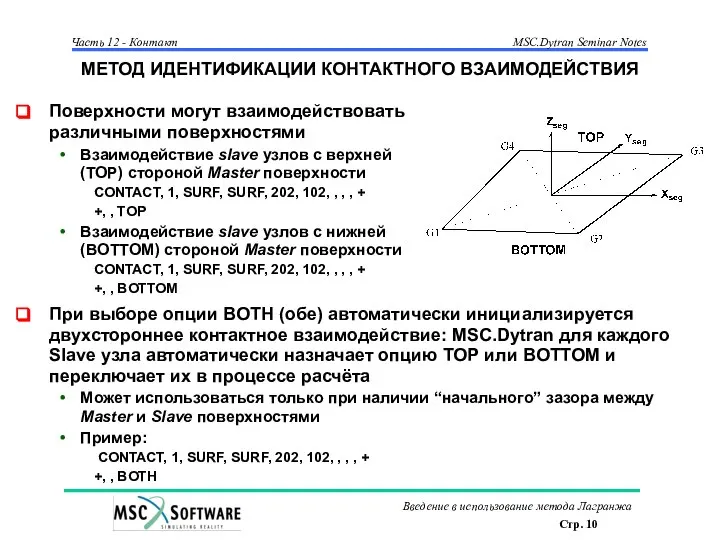
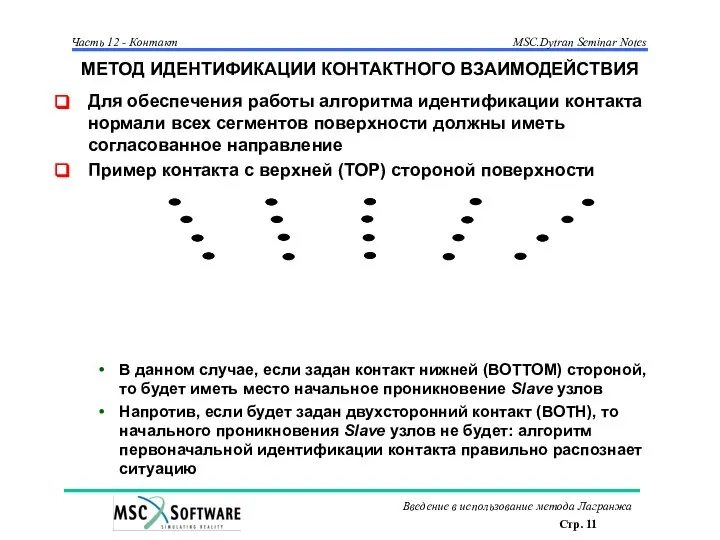
- 10. МЕТОД ИДЕНТИФИКАЦИИ КОНТАКТНОГО ВЗАИМОДЕЙСТВИЯ Поверхности могут взаимодействовать различными поверхностями Взаимодействие slave узлов с верхней (TOP) стороной
- 11. МЕТОД ИДЕНТИФИКАЦИИ КОНТАКТНОГО ВЗАИМОДЕЙСТВИЯ Для обеспечения работы алгоритма идентификации контакта нормали всех сегментов поверхности должны иметь
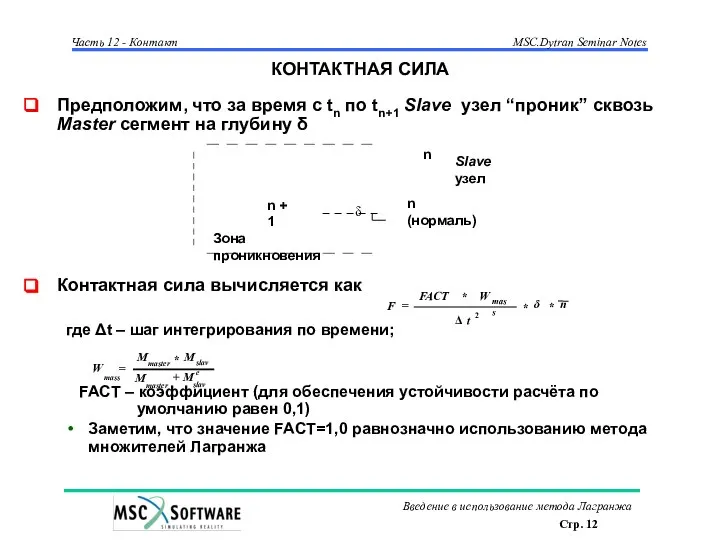
- 12. КОНТАКТНАЯ СИЛА Предположим, что за время с tn по tn+1 Slave узел “проник” сквозь Master сегмент
- 13. ЗАКОН СОХРАНЕНИЯ ИМПУЛЬСА Обеспечение выполнения закона сохранения импульса Вычисленное значение контактной силы прикладывается к Slave узлу
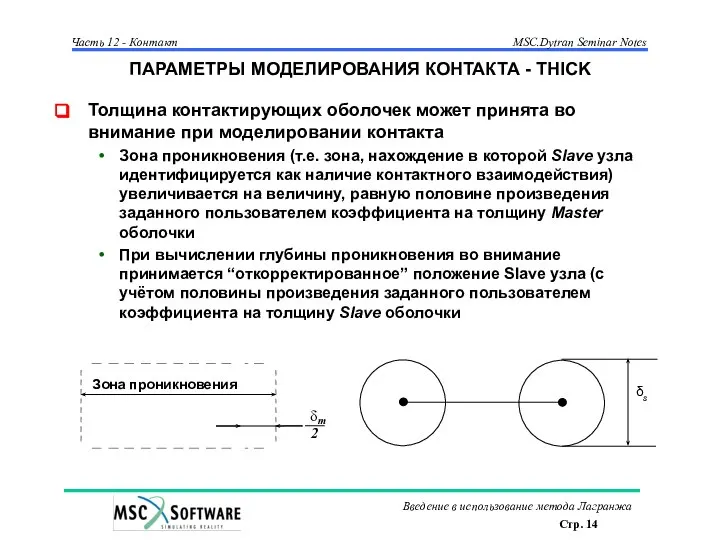
- 14. ПАРАМЕТРЫ МОДЕЛИРОВАНИЯ КОНТАКТА - THICK Толщина контактирующих оболочек может принята во внимание при моделировании контакта Зона
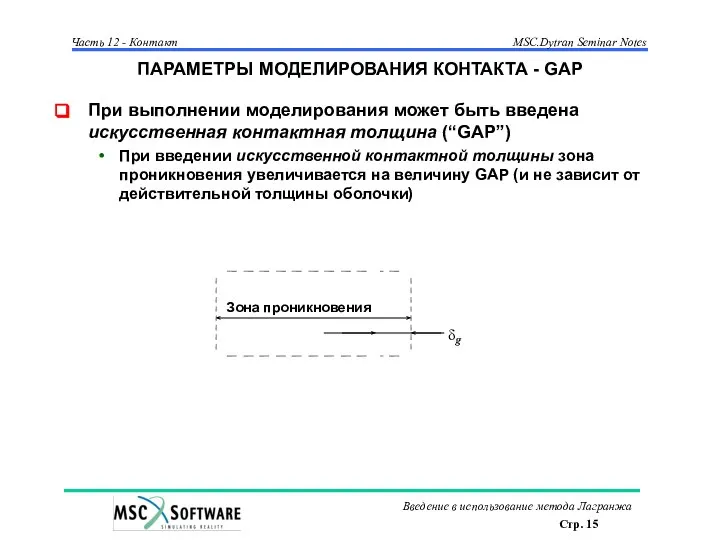
- 15. ПАРАМЕТРЫ МОДЕЛИРОВАНИЯ КОНТАКТА - GAP При выполнении моделирования может быть введена искусственная контактная толщина (“GAP”) При
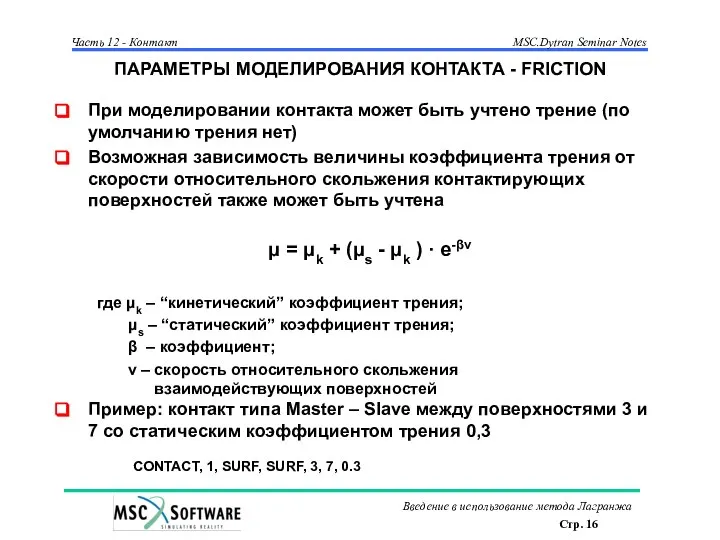
- 16. ПАРАМЕТРЫ МОДЕЛИРОВАНИЯ КОНТАКТА - FRICTION При моделировании контакта может быть учтено трение (по умолчанию трения нет)
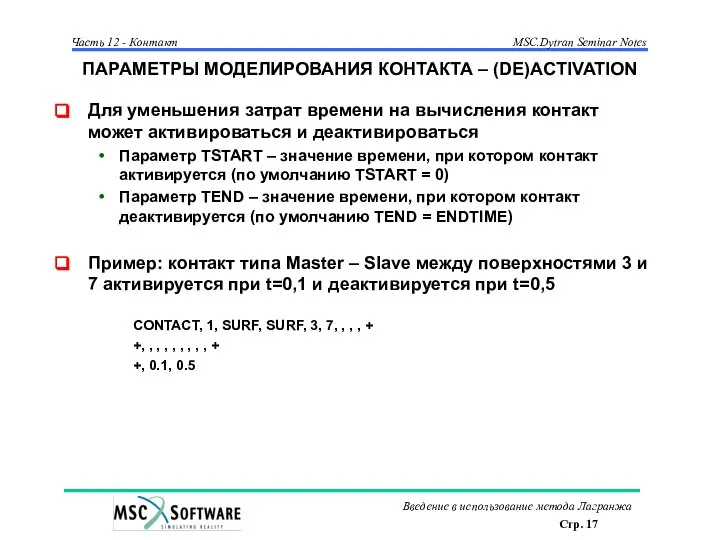
- 17. ПАРАМЕТРЫ МОДЕЛИРОВАНИЯ КОНТАКТА – (DE)ACTIVATION Для уменьшения затрат времени на вычисления контакт может активироваться и деактивироваться
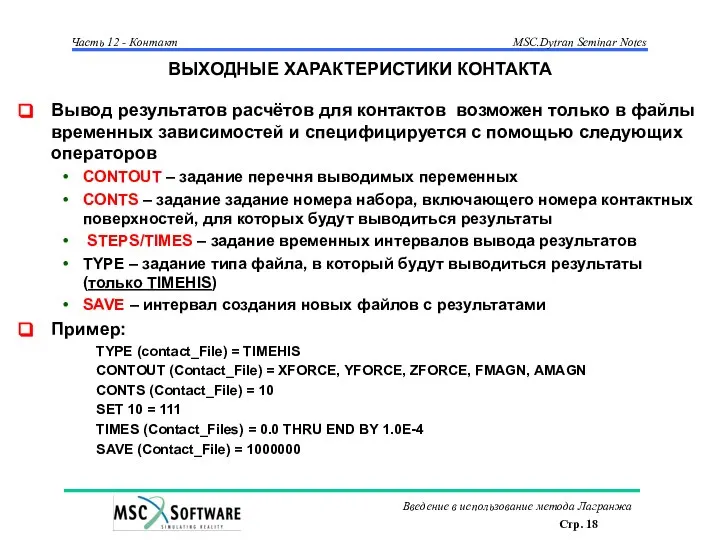
- 18. ВЫХОДНЫЕ ХАРАКТЕРИСТИКИ КОНТАКТА Вывод результатов расчётов для контактов возможен только в файлы временных зависимостей и специфицируется
- 19. ВЕРСИИ КОНТАКТА V2 и V3 – устаревшие V4 – новая версия (рекомендуется к применению в общем
- 20. ПРИМЕНЕНИЕ ОПЦИИ DRAWBEAD Версия контакта DRAWBEAD разработана для использования при моделировании листовой штамповки. Необходимо сформировать список
- 22. Скачать презентацию

СОДЕРЖАНИЕ
Что такое контакт
Контакт типа Master – Slave
Контакт типа Single Surface (самоконтакт)
Адаптивный
СОДЕРЖАНИЕ
Что такое контакт
Контакт типа Master – Slave
Контакт типа Single Surface (самоконтакт)
Адаптивный
ЧТО ТАКОЕ КОНТАКТ
Контакт – это взаимодействие между узлами и/или элементами лагранжевой
ЧТО ТАКОЕ КОНТАКТ
Контакт – это взаимодействие между узлами и/или элементами лагранжевой
КОНТАКТ ТИПА Master - Slave
Предотвращает взаимное проникновение двух поверхностей
Эффективный, экономный в
КОНТАКТ ТИПА Master - Slave
Предотвращает взаимное проникновение двух поверхностей
Эффективный, экономный в
КОНТАКТ ТИПА Single Surface (САМОКОНТАКТ)
Предотвращает взаимное проникновение поверхностей и взаимное проникновение
КОНТАКТ ТИПА Single Surface (САМОКОНТАКТ)
Предотвращает взаимное проникновение поверхностей и взаимное проникновение
АДАПТИВНЫЙ КОНТАКТ
Пример: контакт между объектами, моделируемыми элементами со свойствами 202 и
АДАПТИВНЫЙ КОНТАКТ
Пример: контакт между объектами, моделируемыми элементами со свойствами 202 и
МЕТОД МОДЕЛИРОВАНИЯ КОНТАКТА
Контакт моделируется с использованием метода штрафов
Допускается проникновение узлов в
МЕТОД МОДЕЛИРОВАНИЯ КОНТАКТА
Контакт моделируется с использованием метода штрафов
Допускается проникновение узлов в
МЕТОД ИДЕНТИФИКАЦИИ КОНТАКТНОГО ВЗАИМОДЕЙСТВИЯ
Четыре зоны (возможного) контактного взаимодействия
Узлы “свободны” (не взаимодействуют)
МЕТОД ИДЕНТИФИКАЦИИ КОНТАКТНОГО ВЗАИМОДЕЙСТВИЯ
Четыре зоны (возможного) контактного взаимодействия
Узлы “свободны” (не взаимодействуют)
МЕТОД ИДЕНТИФИКАЦИИ КОНТАКТНОГО ВЗАИМОДЕЙСТВИЯ
Глубина зоны проникновения может быть задана пользователем
Этот параметр
МЕТОД ИДЕНТИФИКАЦИИ КОНТАКТНОГО ВЗАИМОДЕЙСТВИЯ
Глубина зоны проникновения может быть задана пользователем
Этот параметр
МЕТОД ИДЕНТИФИКАЦИИ КОНТАКТНОГО ВЗАИМОДЕЙСТВИЯ
Поверхности могут взаимодействовать различными поверхностями
Взаимодействие slave узлов с
МЕТОД ИДЕНТИФИКАЦИИ КОНТАКТНОГО ВЗАИМОДЕЙСТВИЯ
Поверхности могут взаимодействовать различными поверхностями
Взаимодействие slave узлов с
МЕТОД ИДЕНТИФИКАЦИИ КОНТАКТНОГО ВЗАИМОДЕЙСТВИЯ
Для обеспечения работы алгоритма идентификации контакта нормали всех
МЕТОД ИДЕНТИФИКАЦИИ КОНТАКТНОГО ВЗАИМОДЕЙСТВИЯ
Для обеспечения работы алгоритма идентификации контакта нормали всех
КОНТАКТНАЯ СИЛА
Предположим, что за время с tn по tn+1 Slave узел
КОНТАКТНАЯ СИЛА
Предположим, что за время с tn по tn+1 Slave узел
ЗАКОН СОХРАНЕНИЯ ИМПУЛЬСА
Обеспечение выполнения закона сохранения импульса
Вычисленное значение контактной силы прикладывается
ЗАКОН СОХРАНЕНИЯ ИМПУЛЬСА
Обеспечение выполнения закона сохранения импульса
Вычисленное значение контактной силы прикладывается
ПАРАМЕТРЫ МОДЕЛИРОВАНИЯ КОНТАКТА - THICK
Толщина контактирующих оболочек может принята во внимание
ПАРАМЕТРЫ МОДЕЛИРОВАНИЯ КОНТАКТА - THICK
Толщина контактирующих оболочек может принята во внимание
ПАРАМЕТРЫ МОДЕЛИРОВАНИЯ КОНТАКТА - GAP
При выполнении моделирования может быть введена искусственная
ПАРАМЕТРЫ МОДЕЛИРОВАНИЯ КОНТАКТА - GAP
При выполнении моделирования может быть введена искусственная
ПАРАМЕТРЫ МОДЕЛИРОВАНИЯ КОНТАКТА - FRICTION
При моделировании контакта может быть учтено трение
ПАРАМЕТРЫ МОДЕЛИРОВАНИЯ КОНТАКТА - FRICTION
При моделировании контакта может быть учтено трение
ПАРАМЕТРЫ МОДЕЛИРОВАНИЯ КОНТАКТА – (DE)ACTIVATION
Для уменьшения затрат времени на вычисления контакт
ПАРАМЕТРЫ МОДЕЛИРОВАНИЯ КОНТАКТА – (DE)ACTIVATION
Для уменьшения затрат времени на вычисления контакт
ВЫХОДНЫЕ ХАРАКТЕРИСТИКИ КОНТАКТА
Вывод результатов расчётов для контактов возможен только в файлы
ВЫХОДНЫЕ ХАРАКТЕРИСТИКИ КОНТАКТА
Вывод результатов расчётов для контактов возможен только в файлы
ВЕРСИИ КОНТАКТА
V2 и V3 – устаревшие
V4 – новая версия (рекомендуется к
ВЕРСИИ КОНТАКТА
V2 и V3 – устаревшие
V4 – новая версия (рекомендуется к
ПРИМЕНЕНИЕ ОПЦИИ DRAWBEAD
Версия контакта DRAWBEAD разработана для использования при моделировании листовой
ПРИМЕНЕНИЕ ОПЦИИ DRAWBEAD
Версия контакта DRAWBEAD разработана для использования при моделировании листовой
 Access
Access Мова запитів SQL
Мова запитів SQL Спам. Виды спама
Спам. Виды спама Учусь создавать презентации. (Лекция 6)
Учусь создавать презентации. (Лекция 6) Системные привилегии
Системные привилегии Представление целых чисел в компьютере
Представление целых чисел в компьютере Аттестационная работа. Разработка урока-исследования Системы счисления. (5-6 класс)
Аттестационная работа. Разработка урока-исследования Системы счисления. (5-6 класс) Файлообменная сеть
Файлообменная сеть Графические приемы. Лекция 2
Графические приемы. Лекция 2 Единая электронная регистратура Ямало-Ненецкого автономного округа
Единая электронная регистратура Ямало-Ненецкого автономного округа Топологии компьютерных сетей
Топологии компьютерных сетей Использование информационных технологий
Использование информационных технологий Сетевые технологии
Сетевые технологии Компьютерная графика. Знакомство с графическим редактором Kolour Paint»
Компьютерная графика. Знакомство с графическим редактором Kolour Paint» Алфавитный (объемный) подход к определению количества информации
Алфавитный (объемный) подход к определению количества информации Работа с графическими объектами в текстовом реакторе
Работа с графическими объектами в текстовом реакторе Графический способ записи алгоритмов
Графический способ записи алгоритмов Устройства ввода информации
Устройства ввода информации Для заочников
Для заочников Морские навигационные электронные карты (ЭК)
Морские навигационные электронные карты (ЭК) Cartoon panda PowerPoint templates
Cartoon panda PowerPoint templates Virtual Рos - облачная касса
Virtual Рos - облачная касса Основные конструкции языка программирования в 1С: Предприятие
Основные конструкции языка программирования в 1С: Предприятие Информационная система. База данных
Информационная система. База данных Устройство компьютера. Знакомство с компьютером
Устройство компьютера. Знакомство с компьютером Форматирование текста в Microsoft Word
Форматирование текста в Microsoft Word Рациональная тактика развития. Тактика противодействия
Рациональная тактика развития. Тактика противодействия Мой дневник. Как пользоваться дневником
Мой дневник. Как пользоваться дневником