- Презентация "MSC.Dytran - 13" - скачать презентации по Информатике

Содержание
- 2. СОДЕРЖАНИЕ Типы жёстких тел Жёсткие поверхности Жёсткий материал Нагружение жёстких тел Закрепления жёстких тел
- 3. ТИПЫ ЖЁСТКИХ ТЕЛ В MSC.Dytran можно применить жёсткие тела следующих типов: Жёсткие поверхности произвольной формы Тела,
- 4. ЖЁСТКИЕ ПОВЕРХНОСТИ - RIGID Многогранная поверхность произвольной формы Свойства жёстких поверхностей должны быть заданы пользователем Координаты
- 5. ЖЁСТКИЙ МАТЕРИАЛ - MATRIG Материал интерпретируется как жёсткий элемент Не имеет значения, сколько элементов и/или свойств
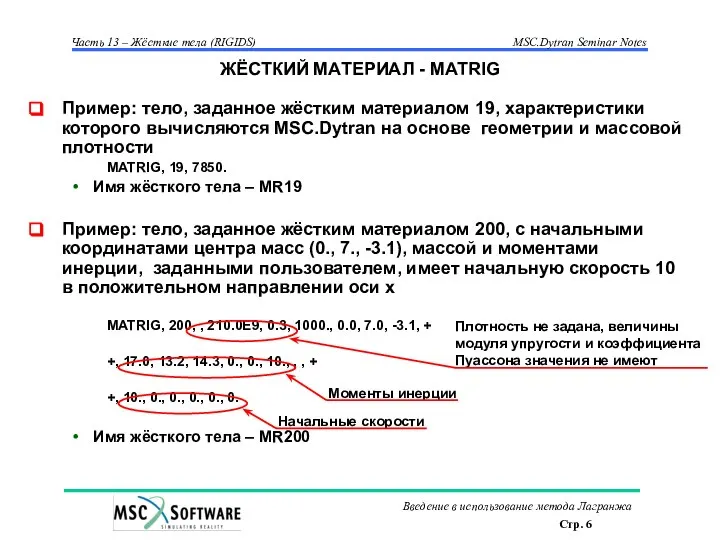
- 6. ЖЁСТКИЙ МАТЕРИАЛ - MATRIG Пример: тело, заданное жёстким материалом 19, характеристики которого вычисляются MSC.Dytran на основе
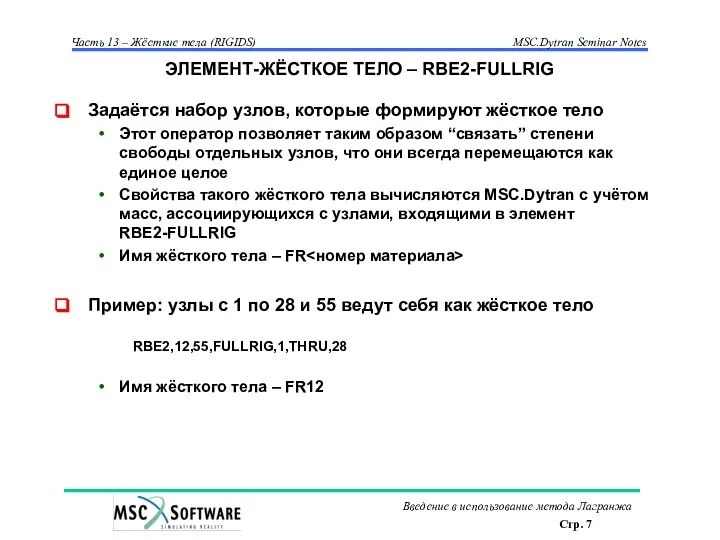
- 7. ЭЛЕМЕНТ-ЖЁСТКОЕ ТЕЛО – RBE2-FULLRIG Задаётся набор узлов, которые формируют жёсткое тело Этот оператор позволяет таким образом
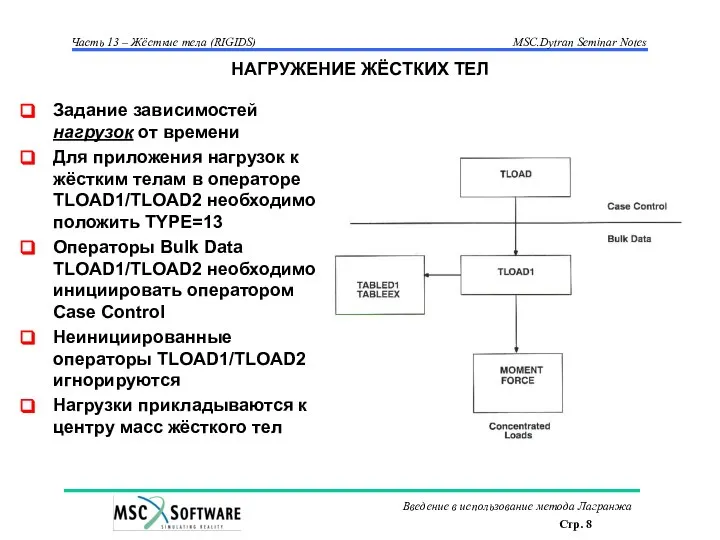
- 8. НАГРУЖЕНИЕ ЖЁСТКИХ ТЕЛ Задание зависимостей нагрузок от времени Для приложения нагрузок к жёстким телам в операторе
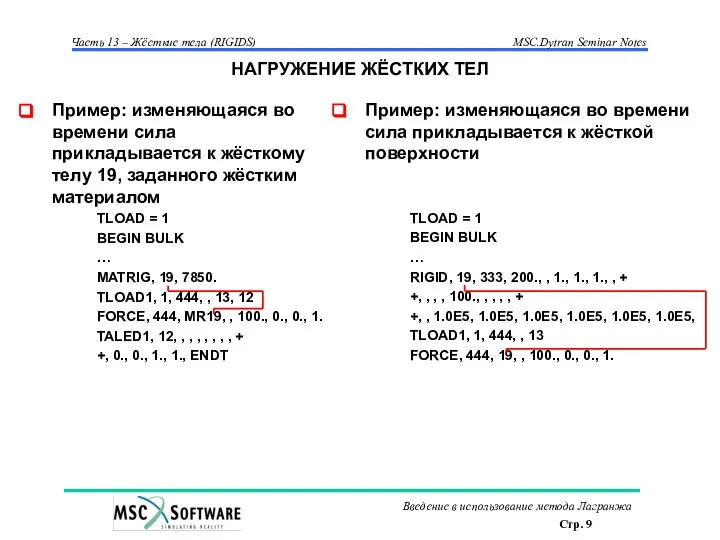
- 9. НАГРУЖЕНИЕ ЖЁСТКИХ ТЕЛ Пример: изменяющаяся во времени сила прикладывается к жёсткому телу 19, заданного жёстким материалом
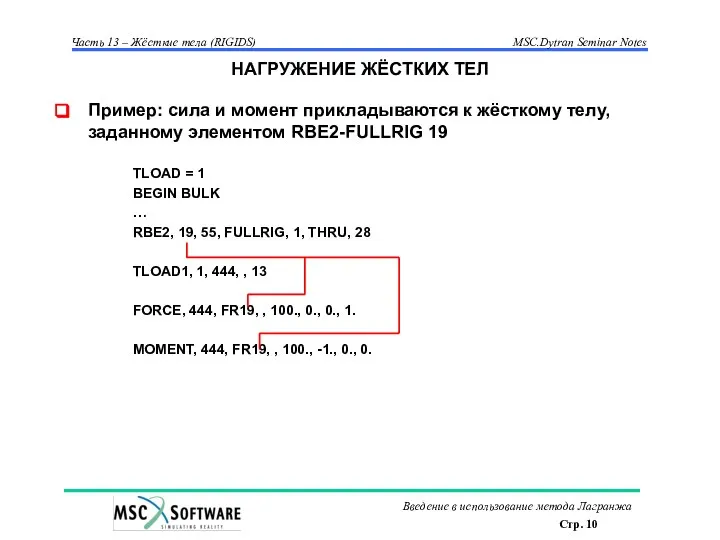
- 10. НАГРУЖЕНИЕ ЖЁСТКИХ ТЕЛ Пример: сила и момент прикладываются к жёсткому телу, заданному элементом RBE2-FULLRIG 19 TLOAD
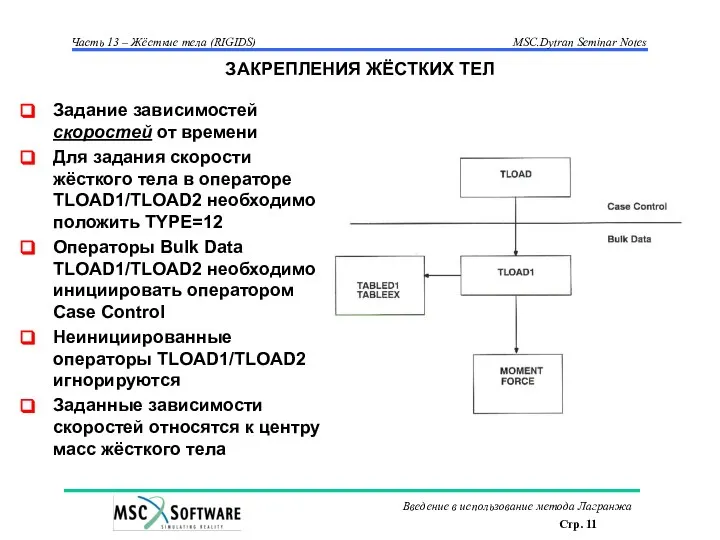
- 11. ЗАКРЕПЛЕНИЯ ЖЁСТКИХ ТЕЛ Задание зависимостей скоростей от времени Для задания скорости жёсткого тела в операторе TLOAD1/TLOAD2
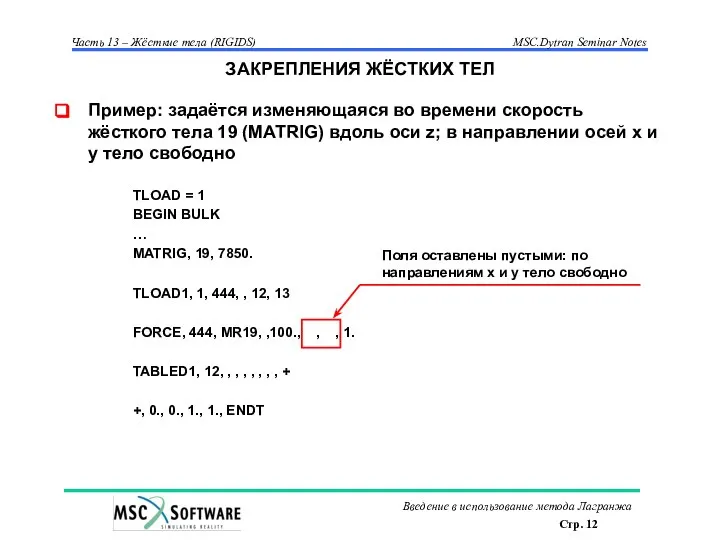
- 12. ЗАКРЕПЛЕНИЯ ЖЁСТКИХ ТЕЛ Пример: задаётся изменяющаяся во времени скорость жёсткого тела 19 (MATRIG) вдоль оси z;
- 14. Скачать презентацию
СОДЕРЖАНИЕ
Типы жёстких тел
Жёсткие поверхности
Жёсткий материал
Нагружение жёстких тел
Закрепления жёстких тел
СОДЕРЖАНИЕ
Типы жёстких тел
Жёсткие поверхности
Жёсткий материал
Нагружение жёстких тел
Закрепления жёстких тел
ТИПЫ ЖЁСТКИХ ТЕЛ
В MSC.Dytran можно применить жёсткие тела следующих типов:
Жёсткие поверхности
ТИПЫ ЖЁСТКИХ ТЕЛ
В MSC.Dytran можно применить жёсткие тела следующих типов:
Жёсткие поверхности
ЖЁСТКИЕ ПОВЕРХНОСТИ - RIGID
Многогранная поверхность произвольной формы
Свойства жёстких поверхностей должны быть
ЖЁСТКИЕ ПОВЕРХНОСТИ - RIGID
Многогранная поверхность произвольной формы
Свойства жёстких поверхностей должны быть
ЖЁСТКИЙ МАТЕРИАЛ - MATRIG
Материал интерпретируется как жёсткий элемент
Не имеет значения, сколько
ЖЁСТКИЙ МАТЕРИАЛ - MATRIG
Материал интерпретируется как жёсткий элемент
Не имеет значения, сколько
ЖЁСТКИЙ МАТЕРИАЛ - MATRIG
Пример: тело, заданное жёстким материалом 19, характеристики которого
ЖЁСТКИЙ МАТЕРИАЛ - MATRIG
Пример: тело, заданное жёстким материалом 19, характеристики которого
ЭЛЕМЕНТ-ЖЁСТКОЕ ТЕЛО – RBE2-FULLRIG
Задаётся набор узлов, которые формируют жёсткое тело
Этот оператор
ЭЛЕМЕНТ-ЖЁСТКОЕ ТЕЛО – RBE2-FULLRIG
Задаётся набор узлов, которые формируют жёсткое тело
Этот оператор
НАГРУЖЕНИЕ ЖЁСТКИХ ТЕЛ
Задание зависимостей нагрузок от времени
Для приложения нагрузок к жёстким
НАГРУЖЕНИЕ ЖЁСТКИХ ТЕЛ
Задание зависимостей нагрузок от времени
Для приложения нагрузок к жёстким
НАГРУЖЕНИЕ ЖЁСТКИХ ТЕЛ
Пример: изменяющаяся во времени сила прикладывается к жёсткому телу
НАГРУЖЕНИЕ ЖЁСТКИХ ТЕЛ
Пример: изменяющаяся во времени сила прикладывается к жёсткому телу
НАГРУЖЕНИЕ ЖЁСТКИХ ТЕЛ
Пример: сила и момент прикладываются к жёсткому телу, заданному
НАГРУЖЕНИЕ ЖЁСТКИХ ТЕЛ
Пример: сила и момент прикладываются к жёсткому телу, заданному
ЗАКРЕПЛЕНИЯ ЖЁСТКИХ ТЕЛ
Задание зависимостей скоростей от времени
Для задания скорости жёсткого тела
ЗАКРЕПЛЕНИЯ ЖЁСТКИХ ТЕЛ
Задание зависимостей скоростей от времени
Для задания скорости жёсткого тела
ЗАКРЕПЛЕНИЯ ЖЁСТКИХ ТЕЛ
Пример: задаётся изменяющаяся во времени скорость жёсткого тела 19
ЗАКРЕПЛЕНИЯ ЖЁСТКИХ ТЕЛ
Пример: задаётся изменяющаяся во времени скорость жёсткого тела 19
 Основные правила создания презентации
Основные правила создания презентации Компьютерная этика
Компьютерная этика Информатика 3-4 класс
Информатика 3-4 класс мультимедиа Microsoft PowerPoint
мультимедиа Microsoft PowerPoint Презентация "решать Новые ''вилы'' от Мин.образования" - скачать презентации по Информатике
Презентация "решать Новые ''вилы'' от Мин.образования" - скачать презентации по Информатике STL Числовые пределы
STL Числовые пределы Векторная графика. Часть 1
Векторная графика. Часть 1 Тема 3. Проекты Access
Тема 3. Проекты Access Самый умный по информатике
Самый умный по информатике AlarusApp
AlarusApp Проект Госуслуги: ваша оценка
Проект Госуслуги: ваша оценка Графики и диаграммы
Графики и диаграммы Одномерные массивы целых чисел. Алгоритмизация и программирование
Одномерные массивы целых чисел. Алгоритмизация и программирование основные элементы окна редактора PowerPoint
основные элементы окна редактора PowerPoint Программное обеспечение. Виды прикладных программ
Программное обеспечение. Виды прикладных программ Алгоритм и его формальное исполнение
Алгоритм и его формальное исполнение Для чего нужна вода Окружающий мир 2 класс
Для чего нужна вода Окружающий мир 2 класс  Další komponenty Gui Návrhový vzor Observer
Další komponenty Gui Návrhový vzor Observer Презентация "Полетно-информационное обслуживание малой авиации" - скачать презентации по Информатике
Презентация "Полетно-информационное обслуживание малой авиации" - скачать презентации по Информатике Программирование сопроцессорного модуля SM-Application преобразователя частоты Unidrive SP с помощью программы SYPT Pro
Программирование сопроцессорного модуля SM-Application преобразователя частоты Unidrive SP с помощью программы SYPT Pro Логика высказываний Алгоритм построения таблиц истинности Автор: Сергеев Евгений Викторович МОУ СОШ №4 г. Миньяра Челябинск
Логика высказываний Алгоритм построения таблиц истинности Автор: Сергеев Евгений Викторович МОУ СОШ №4 г. Миньяра Челябинск Внедрение и сопровождение 1С
Внедрение и сопровождение 1С Музыкальная информатика
Музыкальная информатика Презентация "Macromedia Flash - загадочный мир анимации" - скачать презентации по Информатике
Презентация "Macromedia Flash - загадочный мир анимации" - скачать презентации по Информатике Программа. Программирование на алгоритмическом языке
Программа. Программирование на алгоритмическом языке Программирование в среде Windows
Программирование в среде Windows Проверила: Сарапулова Ольга Валерьевна Выполнила: Санникова Екатерина Владимировна
Проверила: Сарапулова Ольга Валерьевна Выполнила: Санникова Екатерина Владимировна Data Mining
Data Mining