- Программирование робота для соревнования Кегельринг для начинающих

Содержание
- 2. Задача робота: Двигаясь внутри круга, очерченного чёрной линией и не выходя за его пределы более чем
- 3. Требования к роботу Длина – не более 20 см; Ширина – не более 20 см; Высота
- 4. Lego EV3, датчик света подключен к порту 1. Модель робота – 2D модель Для начала настроим
- 5. Для программирования робота, применяются несколько вариантов его поведения: поиск кеглей с помощью датчика расстояния и затем
- 7. Скачать презентацию
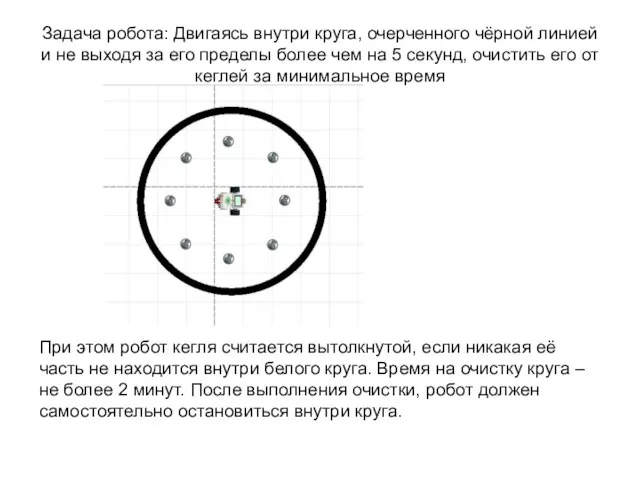
Задача робота: Двигаясь внутри круга, очерченного чёрной линией и не выходя
Задача робота: Двигаясь внутри круга, очерченного чёрной линией и не выходя

Требования к роботу
Длина – не более 20 см;
Ширина – не более
Требования к роботу
Длина – не более 20 см;
Ширина – не более
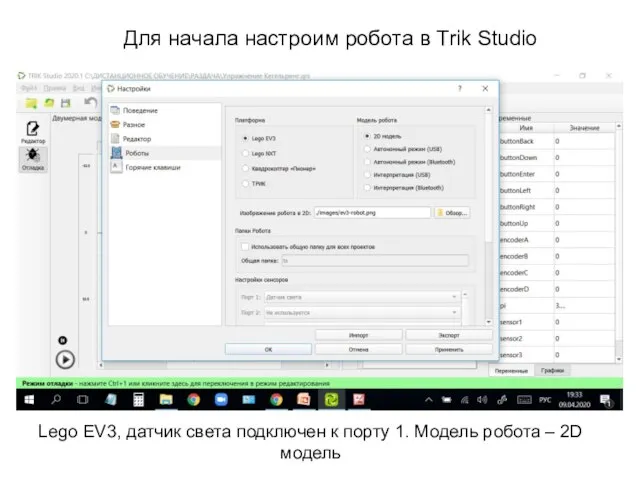
Lego EV3, датчик света подключен к порту 1. Модель робота –
Lego EV3, датчик света подключен к порту 1. Модель робота –
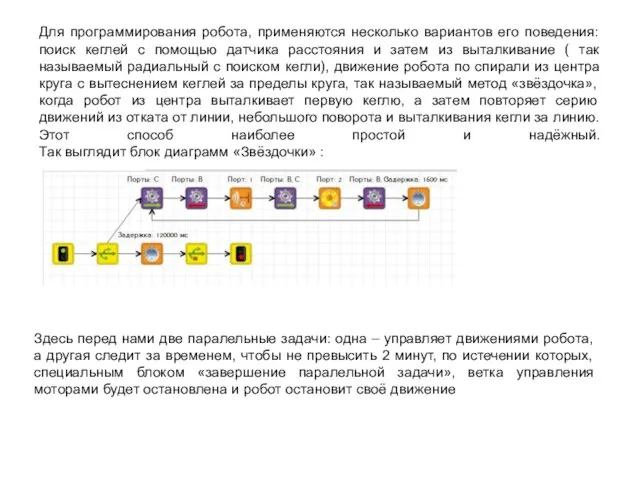
Для программирования робота, применяются несколько вариантов его поведения: поиск кеглей с
Для программирования робота, применяются несколько вариантов его поведения: поиск кеглей с
 Застосування бази даних магазину «Меблі»
Застосування бази даних магазину «Меблі» Приложение для телефона Интерьер нового поколения
Приложение для телефона Интерьер нового поколения Инженерно-технические основы защиты информации
Инженерно-технические основы защиты информации АСОИ склада готовой продукции ОДО Марио
АСОИ склада готовой продукции ОДО Марио Презентация "Руководство по Acronis Disk Director" - скачать презентации по Информатике
Презентация "Руководство по Acronis Disk Director" - скачать презентации по Информатике Этапы выполнения проекта
Этапы выполнения проекта Автоматизация бизнес-процессов
Автоматизация бизнес-процессов Периферийные устройства. Устройство компьютера. (Тема 4.3)
Периферийные устройства. Устройство компьютера. (Тема 4.3) Как не заблудиться на безграничных просторах Интернета
Как не заблудиться на безграничных просторах Интернета Локальные сети
Локальные сети Размещение в HM-Agent
Размещение в HM-Agent Информационные технологии в экономике предприятия
Информационные технологии в экономике предприятия Создание веб-сайта
Создание веб-сайта Дополнение «Альфа-Авто»: Учет рабочего времени, редакция 5
Дополнение «Альфа-Авто»: Учет рабочего времени, редакция 5 Теория автоматов и формальных языков
Теория автоматов и формальных языков Суждение - форма связи понятий
Суждение - форма связи понятий Техника безопасности и санитарные нормы санитарные нормы
Техника безопасности и санитарные нормы санитарные нормы Устройства ввода текстовой и графической информации (сканер)
Устройства ввода текстовой и графической информации (сканер) Сказка о том, откуда возникла наука Информатика
Сказка о том, откуда возникла наука Информатика  Работа рыженко Елены Владимировны, учителя информатики и математики мбоу г. Астрахани «Сош № 64»
Работа рыженко Елены Владимировны, учителя информатики и математики мбоу г. Астрахани «Сош № 64» Запросы с групповыми операциями
Запросы с групповыми операциями Презентация "ВНЕШНЯЯ ПАМЯТЬ, ЕЁ ВИДЫ" - скачать презентации по Информатике
Презентация "ВНЕШНЯЯ ПАМЯТЬ, ЕЁ ВИДЫ" - скачать презентации по Информатике WebWorkers
WebWorkers Системы счисления
Системы счисления Школа подготовки технических администраторов. (Занятие 4)
Школа подготовки технических администраторов. (Занятие 4) Можно ли верить сайтам погоды
Можно ли верить сайтам погоды Преобразование рисунка в графическом редакторе Paint
Преобразование рисунка в графическом редакторе Paint Сравнительный анализ дизайна Интернет-сайтов
Сравнительный анализ дизайна Интернет-сайтов