-
Раздел 7 Анализ переходного процесса

Содержание
- 2. Раздел 7. Анализ переходного процесса ВВЕДЕНИЕ В АНАЛИЗ ПЕРЕХОДНОГО ПРОЦЕССА…..……………………..7 - 4 ПРЯМОЙ МЕТОД АНАЛИЗА………………………………………………………..7 -
- 3. Анализ переходного процесса (продолж.) СТАТИЧЕСКАЯ НАГРУЗКА – ПРЯМОЙ МЕТОД ЗАДАНИЯ..………………….…7 - 28 ЗАМЕЧАНИЯ К СПОСОБУ ЗАДАНИЮ
- 4. Введение в анализ переходного процесса Вычисление отклика на воздействие, зависящее от времени. Воздействие в явной форме
- 5. Прямой метод анализа Уравнение колебаний Отклик вычисляется в дискретные моменты времени с шагом . Для представления
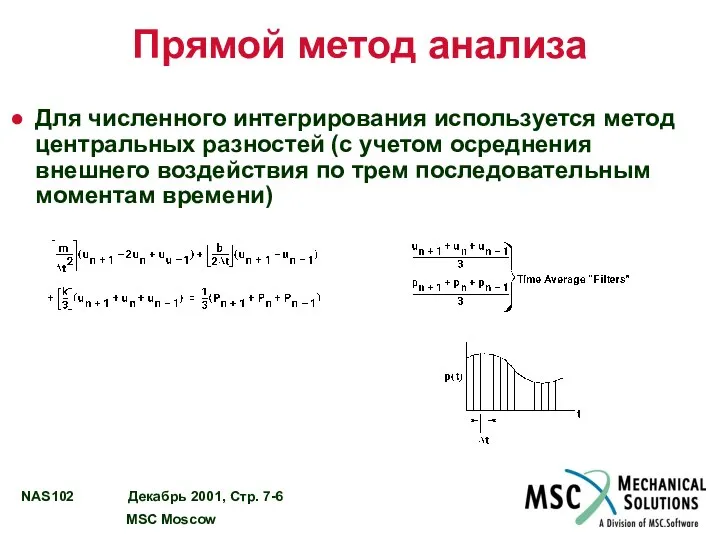
- 6. Прямой метод анализа Для численного интегрирования используется метод центральных разностей (с учетом осреднения внешнего воздействия по
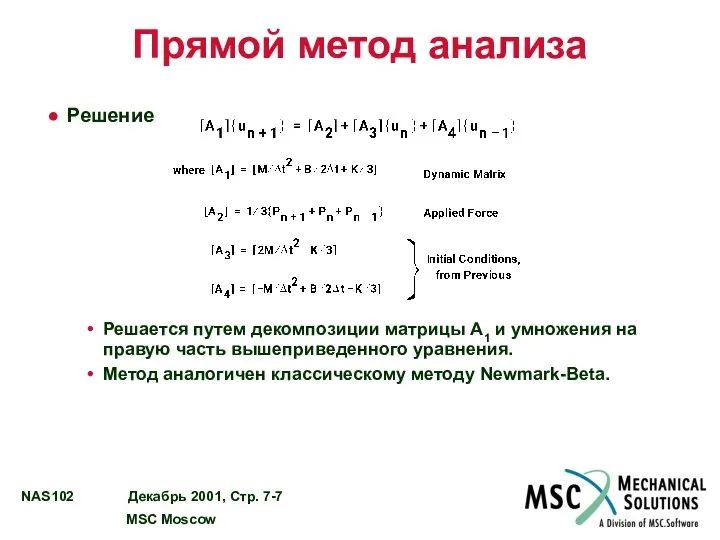
- 7. Прямой метод анализа Решение Решается путем декомпозиции матрицы A1 и умножения на правую часть вышеприведенного уравнения.
- 8. Прямой метод анализа Матрицы M, B и K неизменны во времени. Если Δt неизменно в продолжении
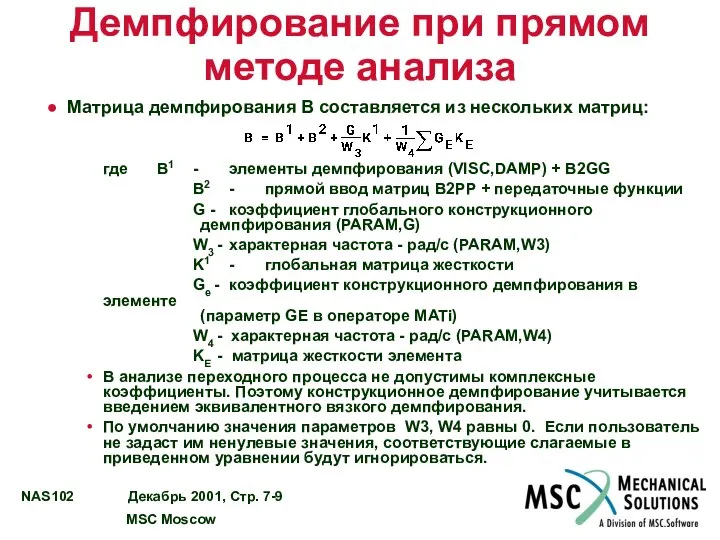
- 9. Демпфирование при прямом методе анализа Матрица демпфирования B составляется из нескольких матриц: где B1 - элементы
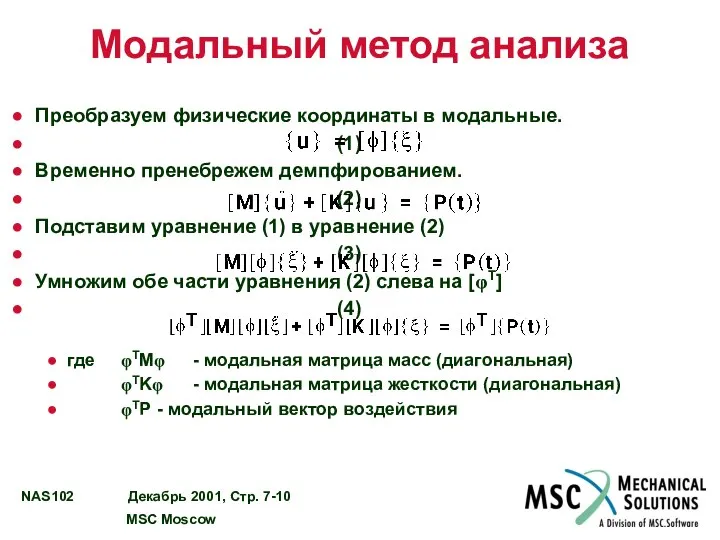
- 10. Модальный метод анализа Преобразуем физические координаты в модальные. (1) Временно пренебрежем демпфированием. (2) Подставим уравнение (1)
- 11. Модальный метод анализа Уравнение (4) может быть записано как для несвязанной системы с одной степенью свободы
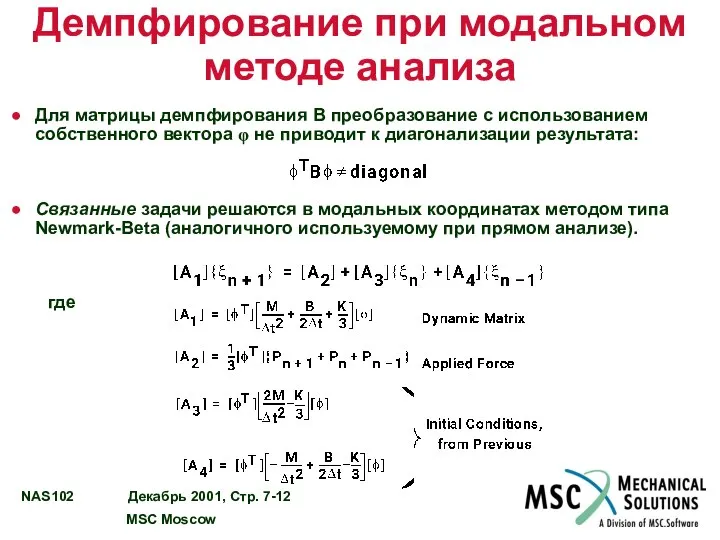
- 12. Демпфирование при модальном методе анализа Для матрицы демпфирования B преобразование с использованием собственного вектора φ не
- 13. Демпфирование при модальном методе анализа При использовании модального демпфирования каждая мода имеет коэффициент демпфирования bi. Уравнения
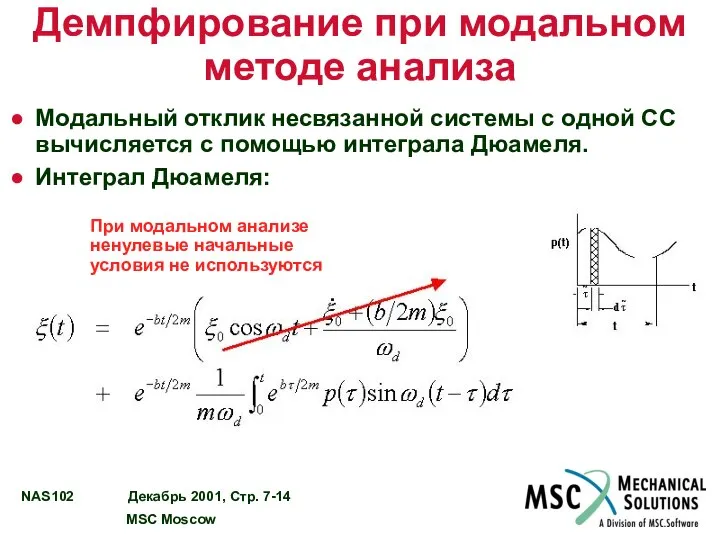
- 14. Демпфирование при модальном методе анализа Модальный отклик несвязанной системы с одной СС вычисляется с помощью интеграла
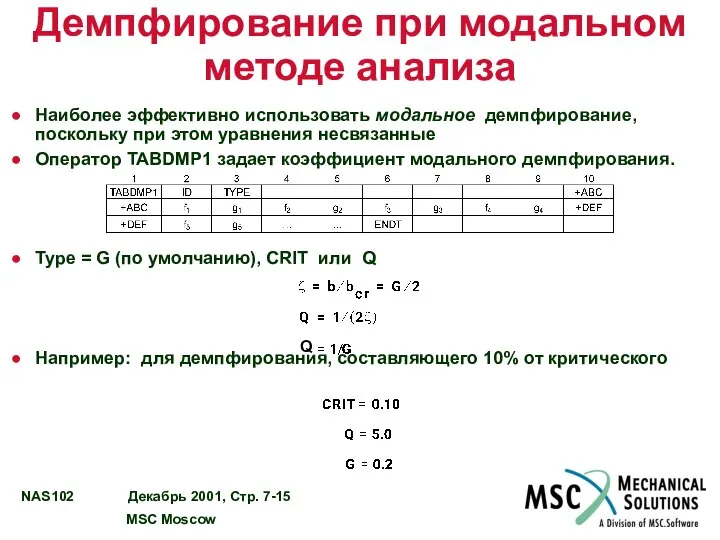
- 15. Демпфирование при модальном методе анализа Наиболее эффективно использовать модальное демпфирование, поскольку при этом уравнения несвязанные Оператор
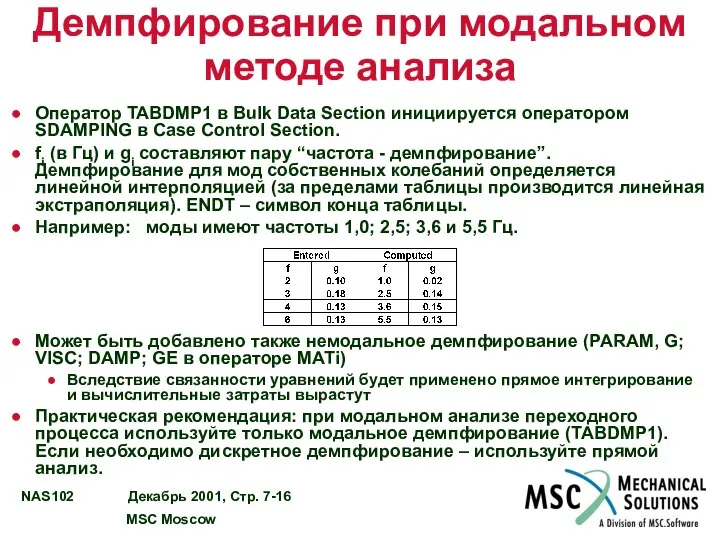
- 16. Демпфирование при модальном методе анализа Оператор TABDMP1 в Bulk Data Section инициируется оператором SDAMPING в Case
- 17. Вычисление результатов при модальном методе анализа Результат расчета в физических координатах вычисляется путем суммирования модальных откликов.
- 18. Управление модами Могут быть необходимыми не все вычисленные моды. Часто только небольшого количество низших мод достаточно
- 19. Задание внешнего воздействия Задание воздействия как функции времени. В MSC.Nastran предусматриваются различные методы: TLOAD1 - “грубая
- 20. Оператор TLOAD1 Задает воздействие в форме: где A - оператор (символ) пространственного распределения воздействия и масштабного
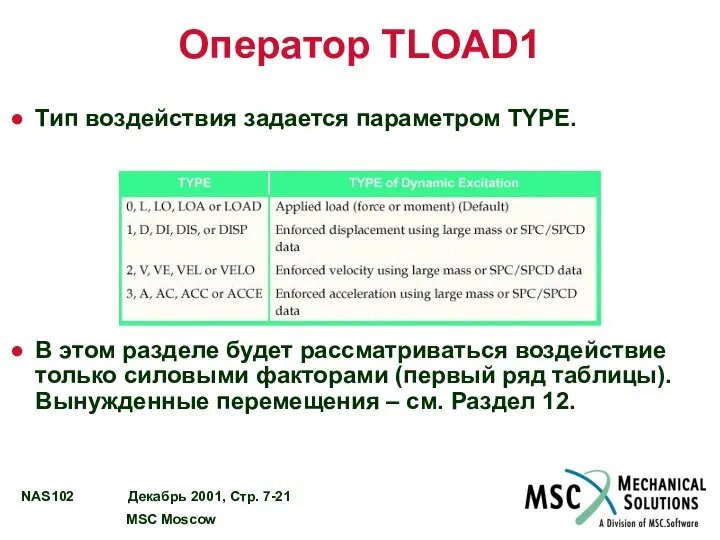
- 21. Оператор TLOAD1 Тип воздействия задается параметром TYPE. В этом разделе будет рассматриваться воздействие только силовыми факторами
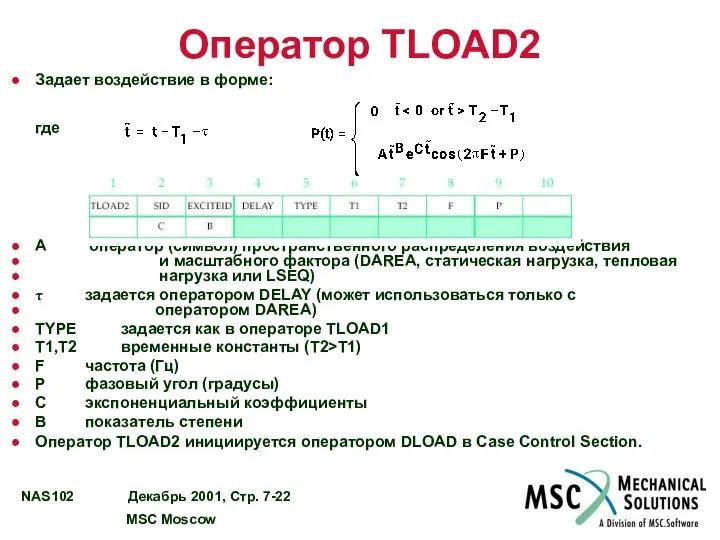
- 22. Оператор TLOAD2 Задает воздействие в форме: где A оператор (символ) пространственного распределения воздействия и масштабного фактора
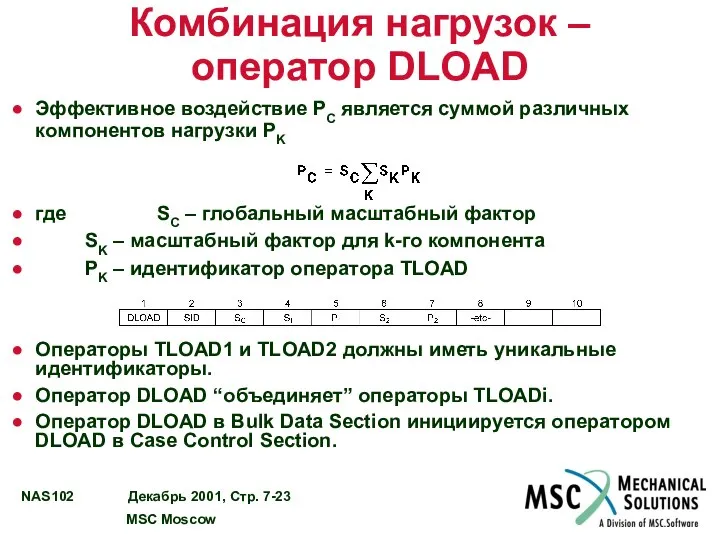
- 23. Комбинация нагрузок – оператор DLOAD Эффективное воздействие PC является суммой различных компонентов нагрузки PK где SC
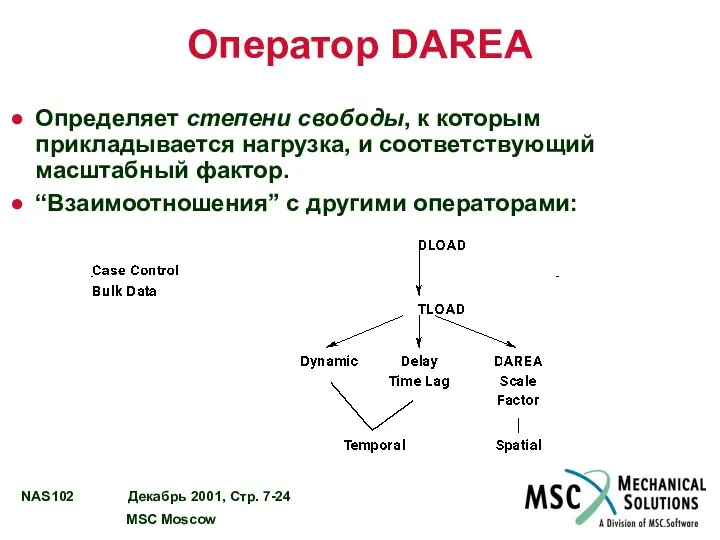
- 24. Оператор DAREA Определяет степени свободы, к которым прикладывается нагрузка, и соответствующий масштабный фактор. “Взаимоотношения” с другими
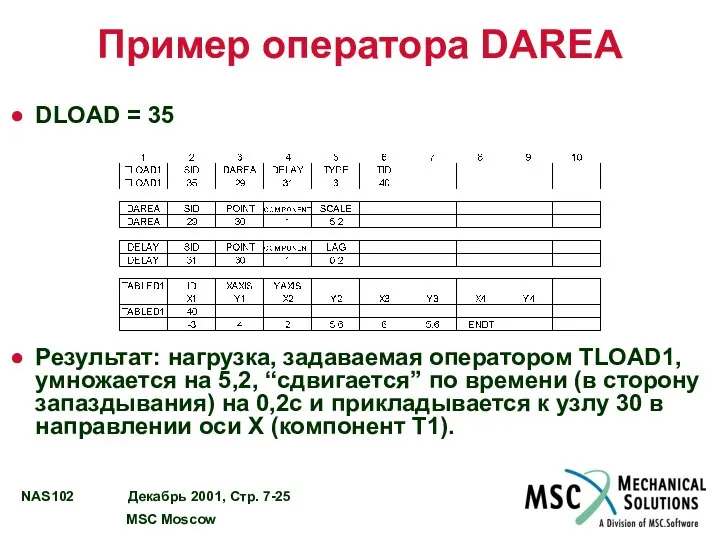
- 25. Пример оператора DAREA DLOAD = 35 Результат: нагрузка, задаваемая оператором TLOAD1, умножается на 5,2, “сдвигается” по
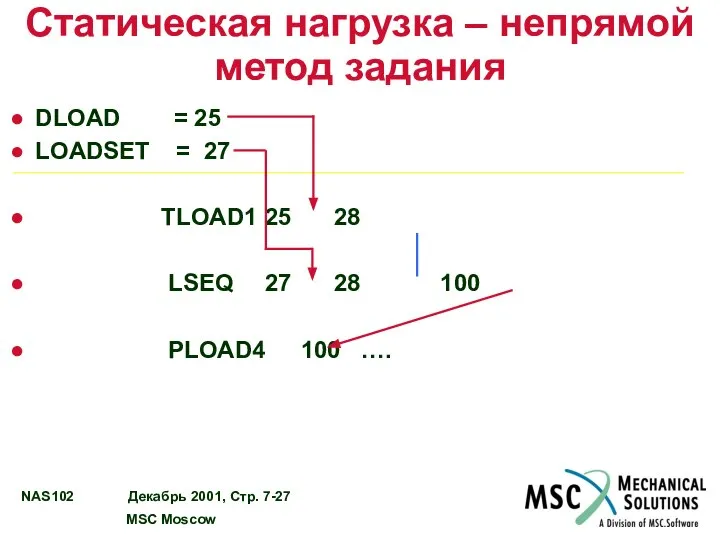
- 26. Статическая нагрузка – непрямой метод задания Задание статических нагрузок, прикладываемых “динамически”. Оператор LSEQ в Bulk Data
- 27. Статическая нагрузка – непрямой метод задания DLOAD = 25 LOADSET = 27 TLOAD1 25 28 LSEQ
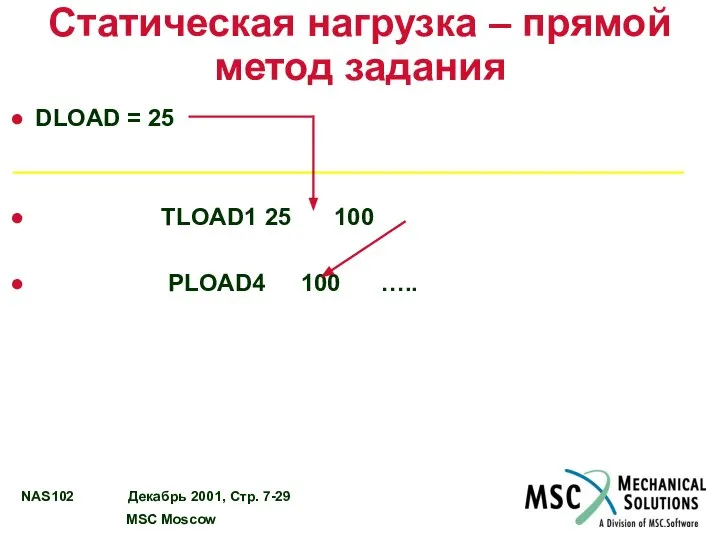
- 28. Статическая нагрузка – прямой метод задания Задание статических нагрузок, прикладываемых “динамически”. Идентификатор непосредственно инициирует статическую нагрузку
- 29. Статическая нагрузка – прямой метод задания DLOAD = 25 TLOAD1 25 100 PLOAD4 100 …..
- 30. Замечания к способу задания внешнего воздействия Учитывайте осреднение нагрузок (1/3). Это сделает нагрузки более плавными и
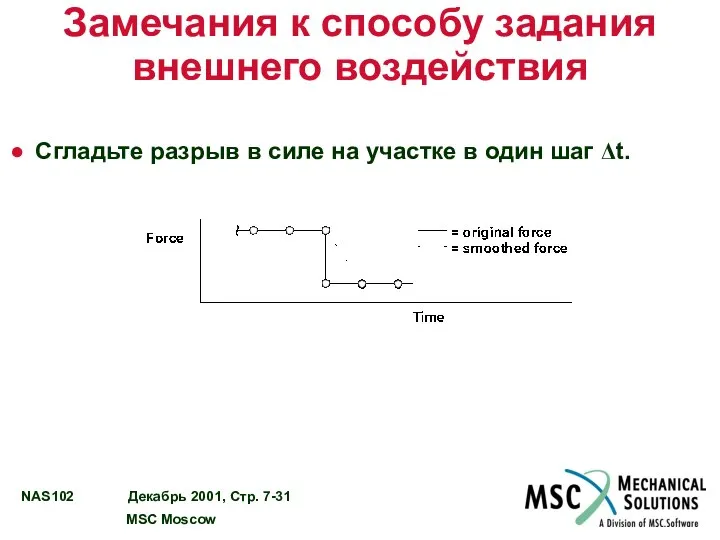
- 31. Замечания к способу задания внешнего воздействия Сгладьте разрыв в силе на участке в один шаг Δt.
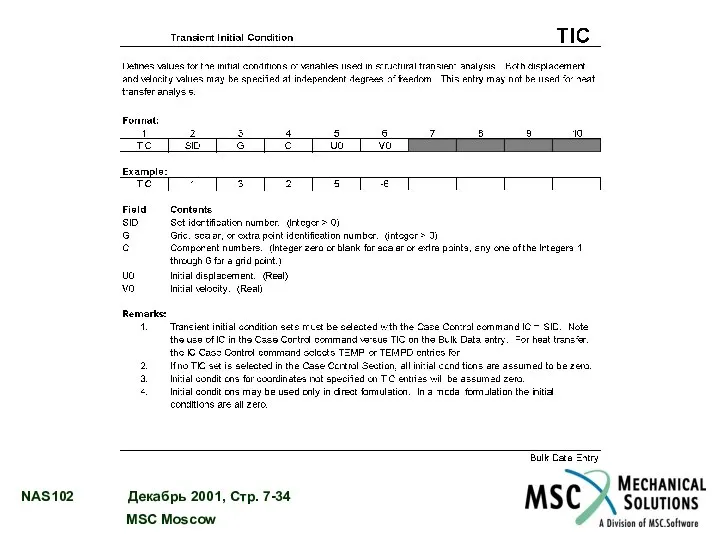
- 32. Начальные условия Начальные значения перемещений и/или скоростей можно учесть при использовании прямого метода анализа переходного процесса
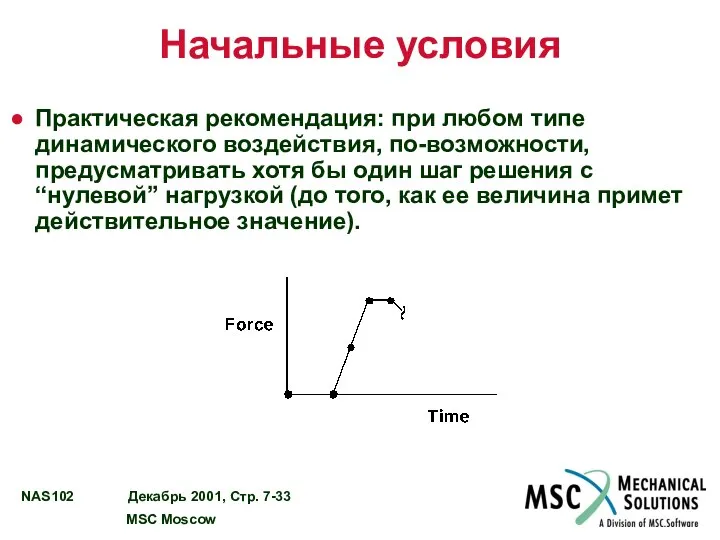
- 33. Начальные условия Практическая рекомендация: при любом типе динамического воздействия, по-возможности, предусматривать хотя бы один шаг решения
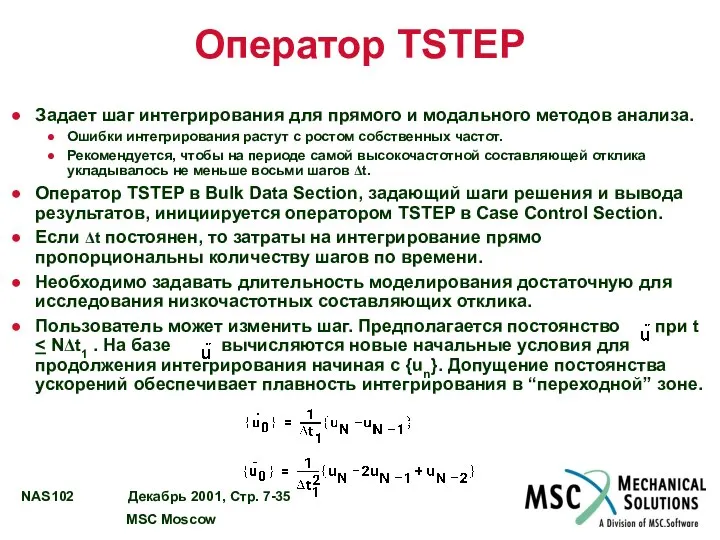
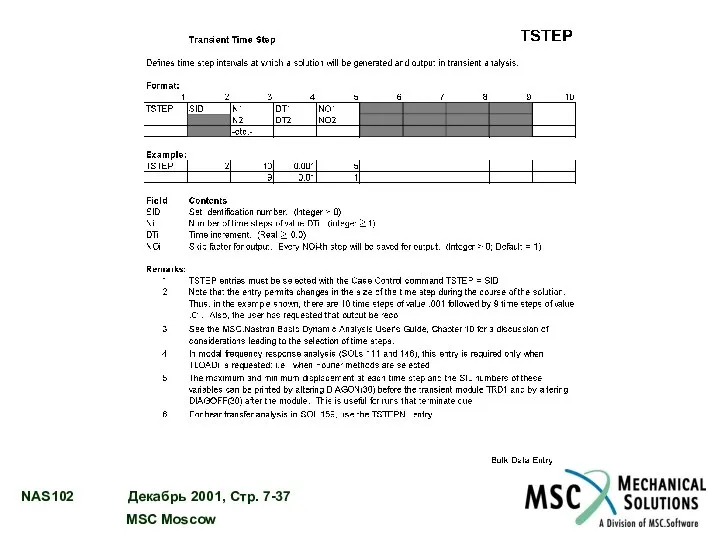
- 35. Оператор TSTEP Задает шаг интегрирования для прямого и модального методов анализа. Ошибки интегрирования растут с ростом
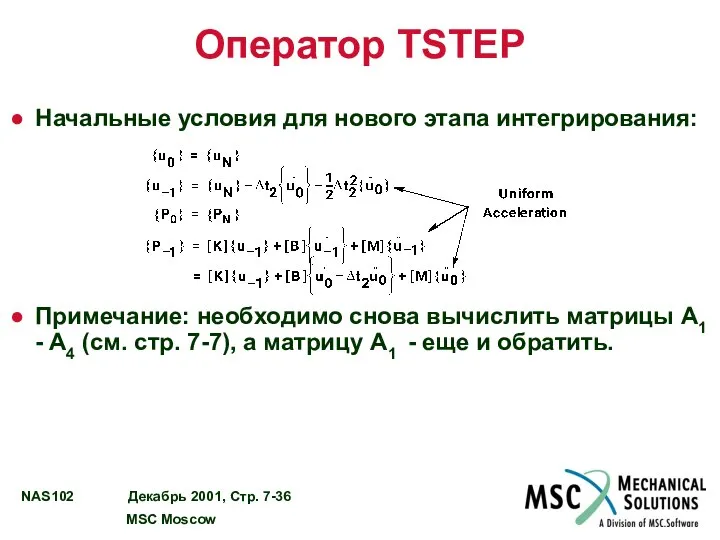
- 36. Оператор TSTEP Начальные условия для нового этапа интегрирования: Примечание: необходимо снова вычислить матрицы A1 - A4
- 38. Предусмотрены три метода вычисления перемещений и напряжений в модальном анализе: модальных перемещений, матричный и модальных ускорений.
- 39. Применение модального и прямого методов анализа
- 40. Управление решением при анализе переходного процесса Executive Control Section SOL Case Control Section DLOAD (требуется при
- 41. Управление решением при анализе переходного процесса Bulk Data Section ASET,OMIT (может применяться при обоих методах) EIGRL
- 42. Виды вычисляемых величин Результаты вычислений для узлов ACCELERATION DISPLACEMENT (или VECTOR) GPSTRESS NLLOAD (вывод значений нелинейных
- 43. Пример №3 Анализ переходного процесса прямым методом
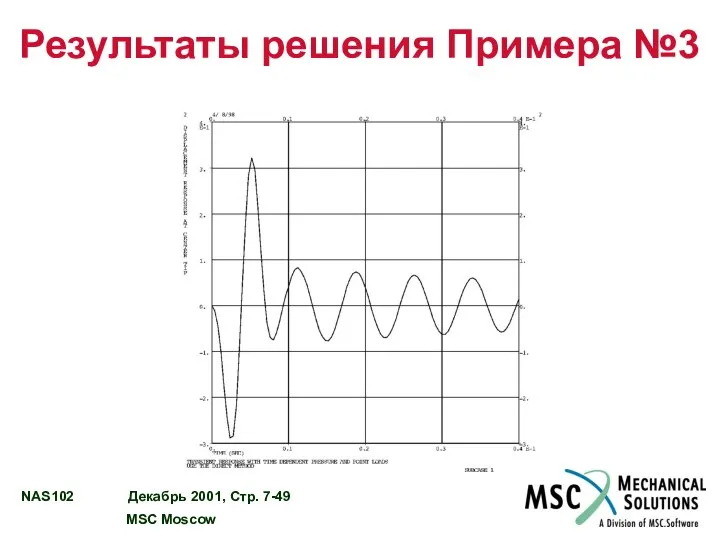
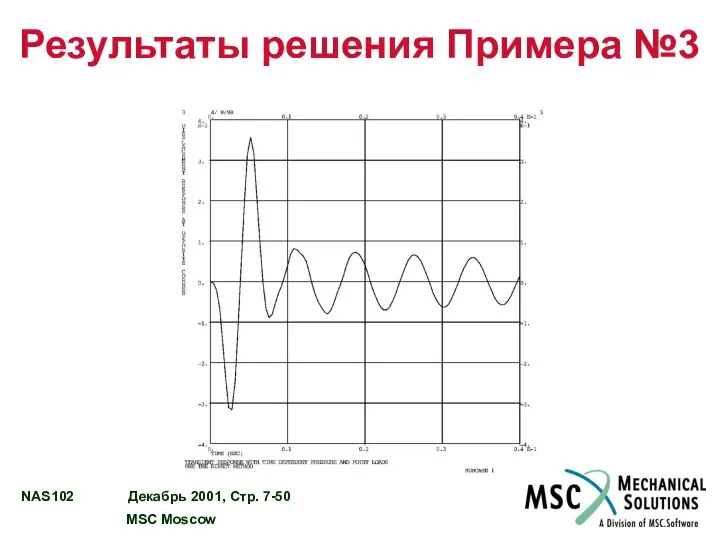
- 44. Пример №3. Анализ переходного процесса прямым методом Используя модель из Примера №1, прямым методом определите колебания
- 45. Входной файл для Примера №3 ID SEMINAR, PROB3 SOL 109 TIME 30 CEND TITLE= TRANSIENT RESOPONSE
- 46. Результаты решения Примера №3 0 SUBCASE 1ML POINT-ID = 11 D I S P L A
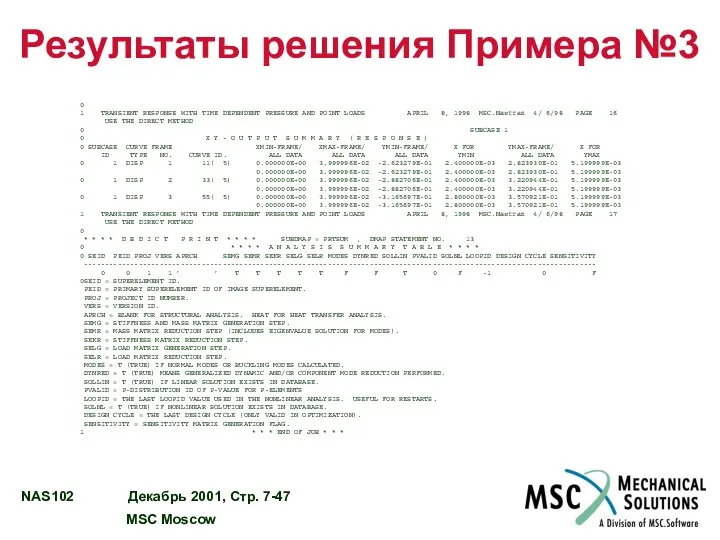
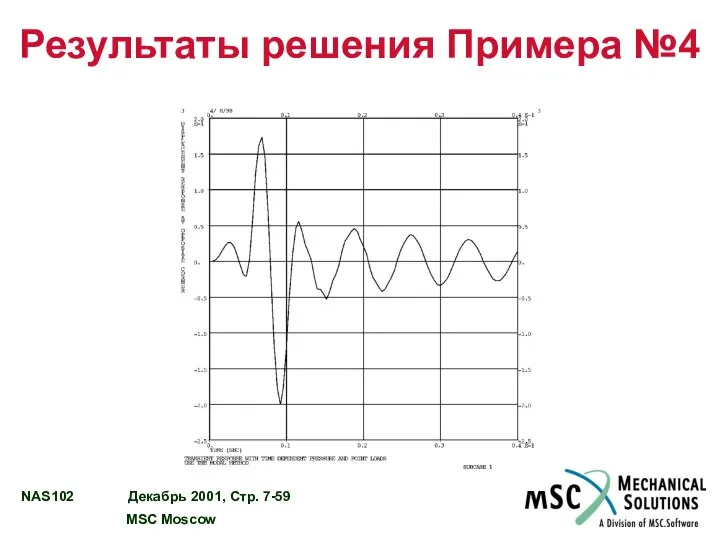
- 47. Результаты решения Примера №3 0 1 TRANSIENT RESPONSE WITH TIME DEPENDENT PRESSURE AND POINT LOADS APRIL
- 48. Результаты решения Примера №3
- 49. Результаты решения Примера №3
- 50. Результаты решения Примера №3
- 51. Пример №4 Анализ переходного процесса модальным методом
- 52. Пример №4. Анализ переходного процесса модальным методом Используя модель из Примера №1, модальным методом определите колебания
- 53. Входной файл для Примера №4 ID SEMINAR, PROB4 SOL 112 TIME 30 CEND TITLE = TRANSIENT
- 54. Входной файл для Примера №4 PLOAD2, 400, 1., 1, THRU, 40 $ $ VARY PRESSURE LOAD
- 55. Результаты решения Примера №4 *** SYSTEM INFORMATION MESSAGE 6916 (DFMSYN) DECOMP ORDERING METHOD CHOSEN: DEFAULT, ORDERING
- 56. Результаты решения Примера №4 POINT-ID = 11 D I S P L A C E M
- 57. Результаты решения Примера №4
- 58. Результаты решения Примера №4
- 59. Результаты решения Примера №4
- 61. Скачать презентацию
Раздел 7. Анализ переходного процесса
ВВЕДЕНИЕ В АНАЛИЗ ПЕРЕХОДНОГО ПРОЦЕССА…..……………………..7 - 4
ПРЯМОЙ
Раздел 7. Анализ переходного процесса
ВВЕДЕНИЕ В АНАЛИЗ ПЕРЕХОДНОГО ПРОЦЕССА…..……………………..7 - 4
ПРЯМОЙ
Анализ переходного процесса (продолж.)
СТАТИЧЕСКАЯ НАГРУЗКА – ПРЯМОЙ МЕТОД ЗАДАНИЯ..………………….…7 - 28
ЗАМЕЧАНИЯ
Анализ переходного процесса (продолж.)
СТАТИЧЕСКАЯ НАГРУЗКА – ПРЯМОЙ МЕТОД ЗАДАНИЯ..………………….…7 - 28
ЗАМЕЧАНИЯ
Введение в анализ переходного процесса
Вычисление отклика на воздействие, зависящее от времени.
Воздействие
Введение в анализ переходного процесса
Вычисление отклика на воздействие, зависящее от времени.
Воздействие
Прямой метод анализа
Уравнение колебаний
Отклик вычисляется в дискретные моменты времени с шагом
Прямой метод анализа
Уравнение колебаний
Отклик вычисляется в дискретные моменты времени с шагом
Прямой метод анализа
Для численного интегрирования используется метод центральных разностей (с учетом
Прямой метод анализа
Для численного интегрирования используется метод центральных разностей (с учетом
Прямой метод анализа
Решение
Решается путем декомпозиции матрицы A1 и умножения на правую
Прямой метод анализа
Решение
Решается путем декомпозиции матрицы A1 и умножения на правую

Прямой метод анализа
Матрицы M, B и K неизменны во времени.
Если Δt
Прямой метод анализа
Матрицы M, B и K неизменны во времени.
Если Δt
Демпфирование при прямом методе анализа
Матрица демпфирования B составляется из нескольких матриц:
где
Демпфирование при прямом методе анализа
Матрица демпфирования B составляется из нескольких матриц:
где
Модальный метод анализа
Преобразуем физические координаты в модальные.
(1)
Временно пренебрежем демпфированием.
(2)
Подставим уравнение
Модальный метод анализа
Преобразуем физические координаты в модальные.
(1)
Временно пренебрежем демпфированием.
(2)
Подставим уравнение
Модальный метод анализа
Уравнение (4) может быть записано как для несвязанной системы
Модальный метод анализа
Уравнение (4) может быть записано как для несвязанной системы
Демпфирование при модальном методе анализа
Для матрицы демпфирования B преобразование с использованием
Демпфирование при модальном методе анализа
Для матрицы демпфирования B преобразование с использованием

Демпфирование при модальном методе анализа
При использовании модального демпфирования каждая мода имеет
Демпфирование при модальном методе анализа
При использовании модального демпфирования каждая мода имеет
Демпфирование при модальном методе анализа
Модальный отклик несвязанной системы с одной СС
Демпфирование при модальном методе анализа
Модальный отклик несвязанной системы с одной СС
Демпфирование при модальном методе анализа
Наиболее эффективно использовать модальное демпфирование, поскольку при
Демпфирование при модальном методе анализа
Наиболее эффективно использовать модальное демпфирование, поскольку при
Демпфирование при модальном методе анализа
Оператор TABDMP1 в Bulk Data Section инициируется
Демпфирование при модальном методе анализа
Оператор TABDMP1 в Bulk Data Section инициируется
Вычисление результатов при модальном методе анализа
Результат расчета в физических координатах вычисляется
Вычисление результатов при модальном методе анализа
Результат расчета в физических координатах вычисляется
Управление модами
Могут быть необходимыми не все вычисленные моды. Часто только небольшого
Управление модами
Могут быть необходимыми не все вычисленные моды. Часто только небольшого

Задание внешнего воздействия
Задание воздействия как функции времени.
В MSC.Nastran предусматриваются различные методы:
TLOAD1 -
Задание внешнего воздействия
Задание воздействия как функции времени.
В MSC.Nastran предусматриваются различные методы:
TLOAD1 -

Оператор TLOAD1
Задает воздействие в форме:
где A - оператор (символ) пространственного
распределения воздействия и
Оператор TLOAD1
Задает воздействие в форме:
где A - оператор (символ) пространственного
распределения воздействия и
Оператор TLOAD1
Тип воздействия задается параметром TYPE.
В этом разделе будет рассматриваться воздействие
Оператор TLOAD1
Тип воздействия задается параметром TYPE.
В этом разделе будет рассматриваться воздействие
Оператор TLOAD2
Задает воздействие в форме:
где
A оператор (символ) пространственного распределения воздействия
Оператор TLOAD2
Задает воздействие в форме:
где
A оператор (символ) пространственного распределения воздействия
Комбинация нагрузок –
оператор DLOAD
Эффективное воздействие PC является суммой различных компонентов нагрузки
Комбинация нагрузок –
оператор DLOAD
Эффективное воздействие PC является суммой различных компонентов нагрузки
Оператор DAREA
Определяет степени свободы, к которым прикладывается нагрузка, и соответствующий масштабный
Оператор DAREA
Определяет степени свободы, к которым прикладывается нагрузка, и соответствующий масштабный
Пример оператора DAREA
DLOAD = 35
Результат: нагрузка, задаваемая оператором TLOAD1, умножается на
Пример оператора DAREA
DLOAD = 35
Результат: нагрузка, задаваемая оператором TLOAD1, умножается на

Статическая нагрузка – непрямой метод задания
Задание статических нагрузок, прикладываемых “динамически”.
Оператор LSEQ
Статическая нагрузка – непрямой метод задания
Задание статических нагрузок, прикладываемых “динамически”.
Оператор LSEQ
Статическая нагрузка – непрямой метод задания
DLOAD = 25
LOADSET = 27
TLOAD1 25
Статическая нагрузка – непрямой метод задания
DLOAD = 25
LOADSET = 27
TLOAD1 25

Статическая нагрузка – прямой метод задания
Задание статических нагрузок, прикладываемых “динамически”.
Идентификатор непосредственно
Статическая нагрузка – прямой метод задания
Задание статических нагрузок, прикладываемых “динамически”.
Идентификатор непосредственно
Статическая нагрузка – прямой метод задания
DLOAD = 25
TLOAD1 25 100
PLOAD4 100 …..
Статическая нагрузка – прямой метод задания
DLOAD = 25
TLOAD1 25 100
PLOAD4 100 …..

Замечания к способу задания внешнего воздействия
Учитывайте осреднение нагрузок (1/3). Это сделает
Замечания к способу задания внешнего воздействия
Учитывайте осреднение нагрузок (1/3). Это сделает
Замечания к способу задания внешнего воздействия
Сгладьте разрыв в силе на участке
Замечания к способу задания внешнего воздействия
Сгладьте разрыв в силе на участке

Начальные условия
Начальные значения перемещений и/или скоростей можно учесть при использовании прямого
Начальные условия
Начальные значения перемещений и/или скоростей можно учесть при использовании прямого
Начальные условия
Практическая рекомендация: при любом типе динамического воздействия, по-возможности, предусматривать хотя
Начальные условия
Практическая рекомендация: при любом типе динамического воздействия, по-возможности, предусматривать хотя
Оператор TSTEP
Задает шаг интегрирования для прямого и модального методов анализа.
Ошибки интегрирования
Оператор TSTEP
Задает шаг интегрирования для прямого и модального методов анализа.
Ошибки интегрирования
Оператор TSTEP
Начальные условия для нового этапа интегрирования:
Примечание: необходимо снова вычислить матрицы
Оператор TSTEP
Начальные условия для нового этапа интегрирования:
Примечание: необходимо снова вычислить матрицы
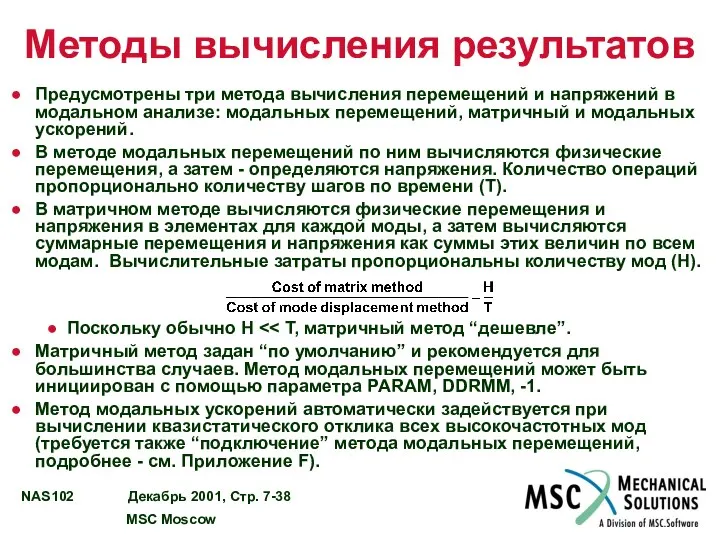
Предусмотрены три метода вычисления перемещений и напряжений в модальном анализе: модальных
Предусмотрены три метода вычисления перемещений и напряжений в модальном анализе: модальных
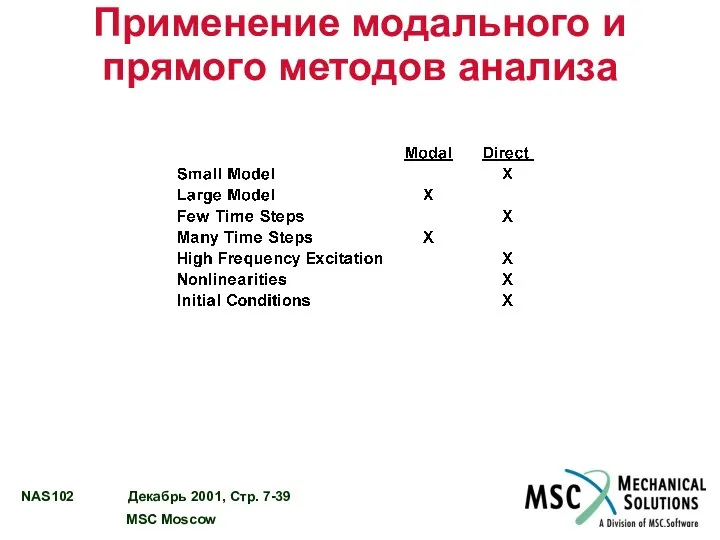
Применение модального и прямого методов анализа
Применение модального и прямого методов анализа
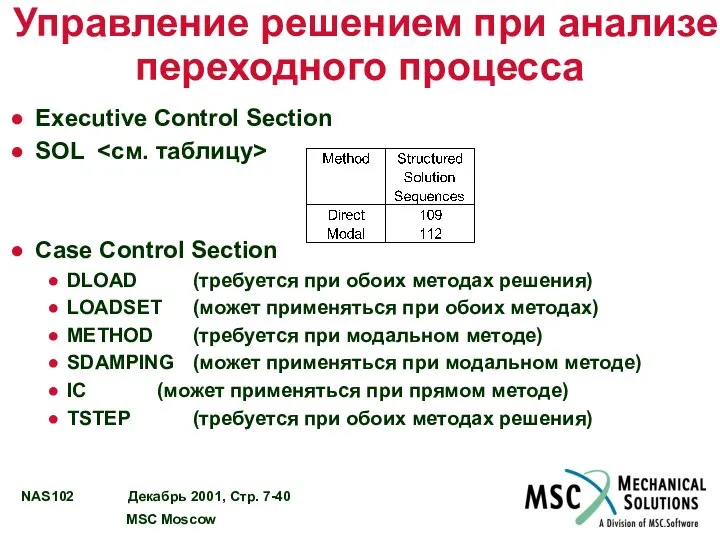
Управление решением при анализе переходного процесса
Executive Control Section
SOL <см. таблицу>
Case Control
Управление решением при анализе переходного процесса
Executive Control Section
SOL <см. таблицу>
Case Control
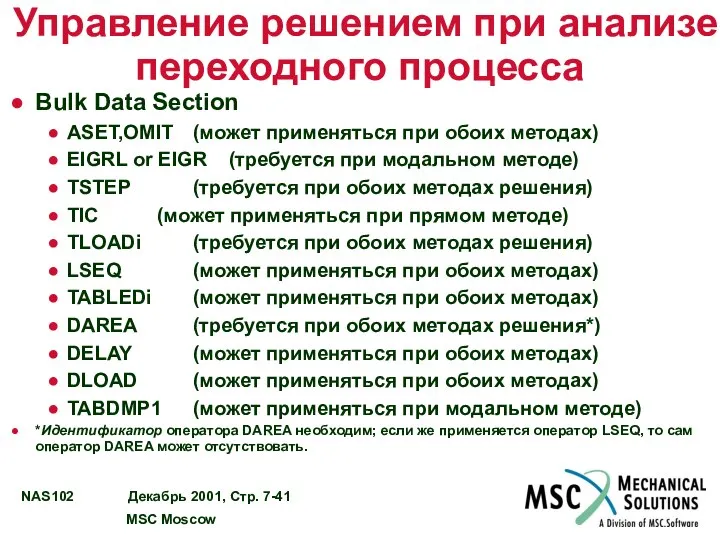
Управление решением при анализе переходного процесса
Bulk Data Section
ASET,OMIT (может применяться при обоих
Управление решением при анализе переходного процесса
Bulk Data Section
ASET,OMIT (может применяться при обоих
Виды вычисляемых величин
Результаты вычислений для узлов
ACCELERATION
DISPLACEMENT (или VECTOR)
GPSTRESS
NLLOAD (вывод значений нелинейных
Виды вычисляемых величин
Результаты вычислений для узлов
ACCELERATION
DISPLACEMENT (или VECTOR)
GPSTRESS
NLLOAD (вывод значений нелинейных
Пример №3
Анализ переходного процесса прямым методом
Пример №3
Анализ переходного процесса прямым методом
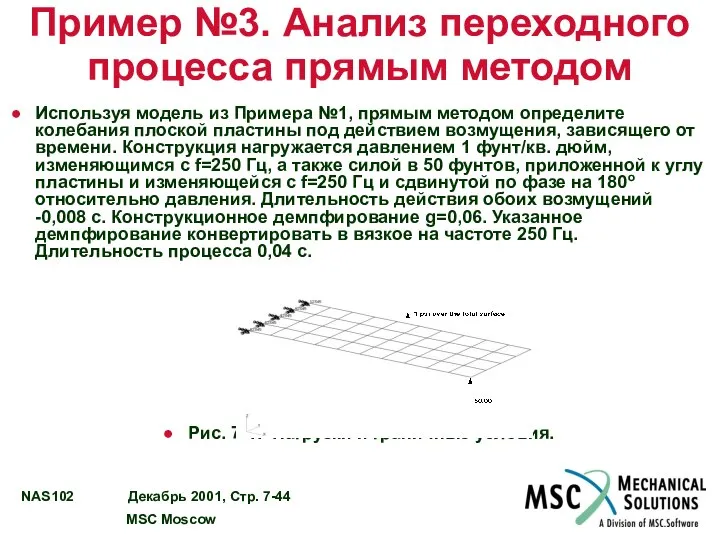
Пример №3. Анализ переходного процесса прямым методом
Используя модель из Примера №1,
Пример №3. Анализ переходного процесса прямым методом
Используя модель из Примера №1,
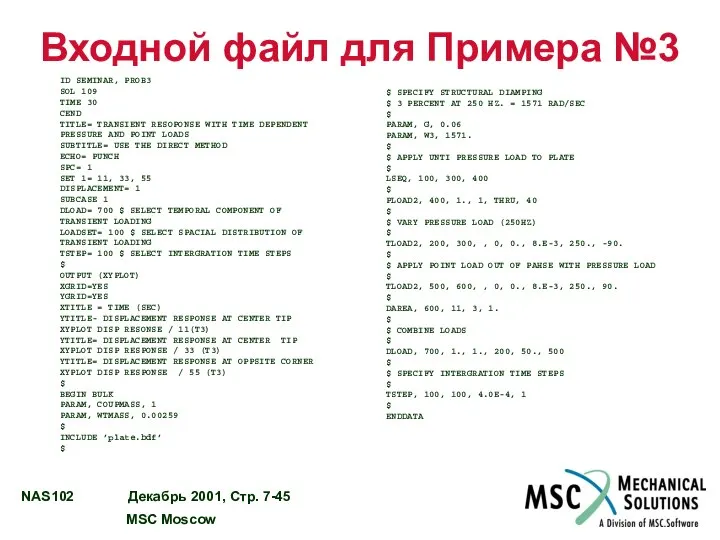
Входной файл для Примера №3
ID SEMINAR, PROB3
SOL 109
TIME 30
CEND
TITLE= TRANSIENT RESOPONSE
Входной файл для Примера №3
ID SEMINAR, PROB3
SOL 109
TIME 30
CEND
TITLE= TRANSIENT RESOPONSE

Результаты решения Примера №3
0 SUBCASE 1ML
POINT-ID = 11
D
Результаты решения Примера №3
0 SUBCASE 1ML
POINT-ID = 11
D
Результаты решения Примера №3
0
1 TRANSIENT RESPONSE WITH TIME DEPENDENT PRESSURE
Результаты решения Примера №3
0
1 TRANSIENT RESPONSE WITH TIME DEPENDENT PRESSURE

Результаты решения Примера №3
Результаты решения Примера №3
Результаты решения Примера №3
Результаты решения Примера №3
Результаты решения Примера №3
Результаты решения Примера №3
Пример №4
Анализ переходного процесса модальным методом
Пример №4
Анализ переходного процесса модальным методом

Пример №4. Анализ переходного процесса модальным методом
Используя модель из Примера №1,
Пример №4. Анализ переходного процесса модальным методом
Используя модель из Примера №1,
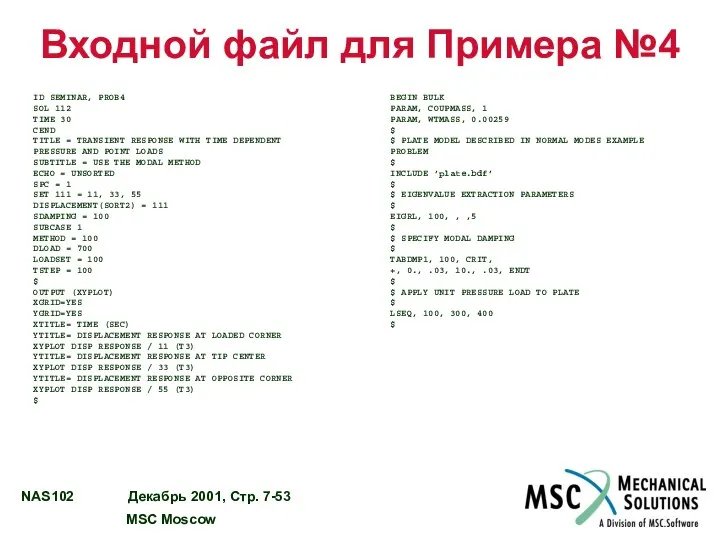
Входной файл для Примера №4
ID SEMINAR, PROB4
SOL 112
TIME 30
CEND
TITLE = TRANSIENT
Входной файл для Примера №4
ID SEMINAR, PROB4
SOL 112
TIME 30
CEND
TITLE = TRANSIENT
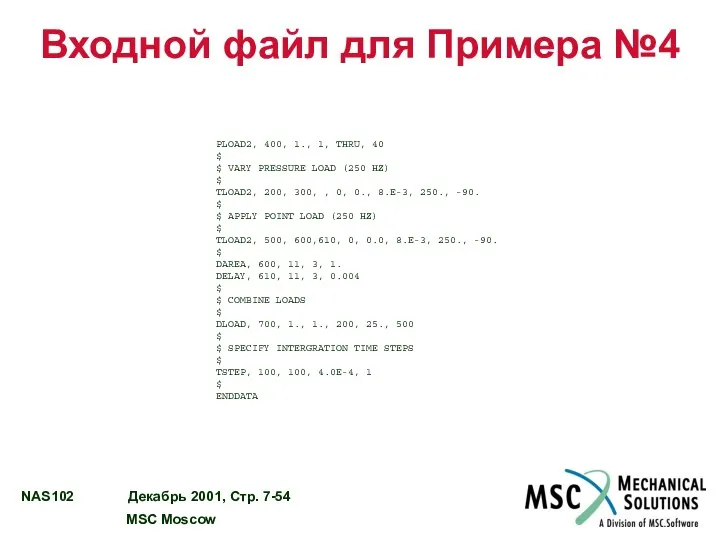
Входной файл для Примера №4
PLOAD2, 400, 1., 1, THRU, 40
$
$ VARY
Входной файл для Примера №4
PLOAD2, 400, 1., 1, THRU, 40
$
$ VARY
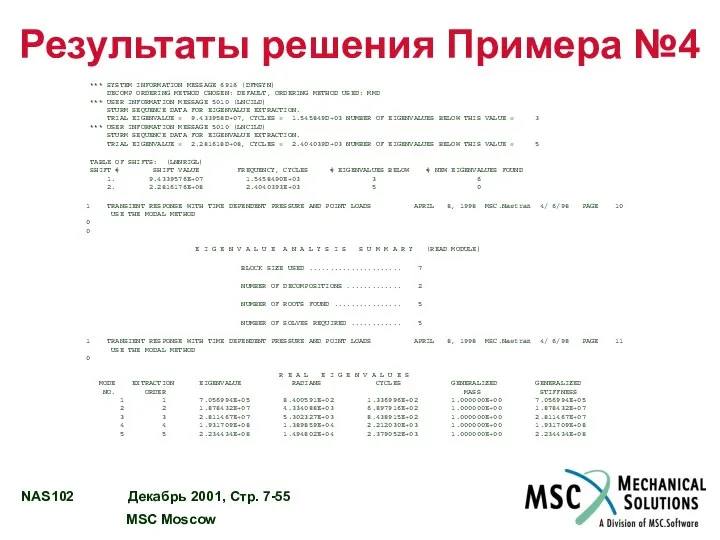
Результаты решения Примера №4
*** SYSTEM INFORMATION MESSAGE 6916 (DFMSYN)
DECOMP
Результаты решения Примера №4
*** SYSTEM INFORMATION MESSAGE 6916 (DFMSYN) DECOMP

Результаты решения Примера №4
POINT-ID = 11
D I S P
Результаты решения Примера №4
POINT-ID = 11 D I S P
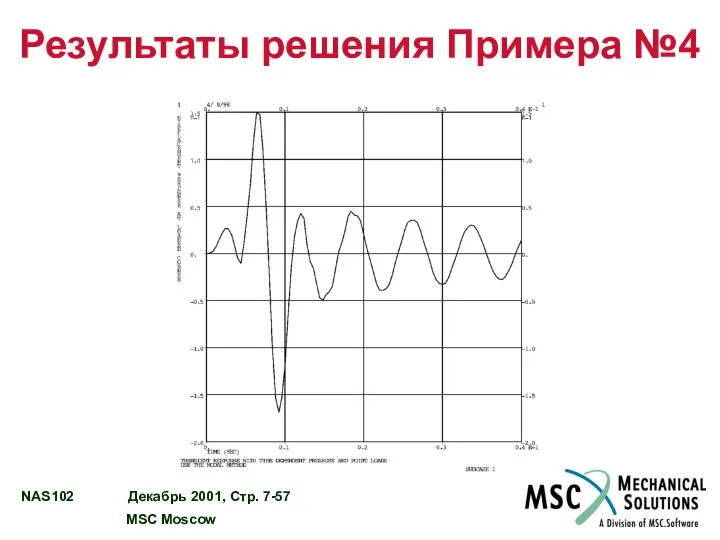
Результаты решения Примера №4
Результаты решения Примера №4

Результаты решения Примера №4
Результаты решения Примера №4
Результаты решения Примера №4
Результаты решения Примера №4
 Моя профессия – оператор ЭВМ
Моя профессия – оператор ЭВМ Технология обработки графической информации в векторной графике
Технология обработки графической информации в векторной графике Microsoft® Office Access 2007. Быстрое освоение программы
Microsoft® Office Access 2007. Быстрое освоение программы Алгоритмы и исполнители основы алгоритмизации
Алгоритмы и исполнители основы алгоритмизации GIF2
GIF2 Мастер-класс Как создать буктрейлер?
Мастер-класс Как создать буктрейлер? Переменные и типы данных. Лекция 2
Переменные и типы данных. Лекция 2 Перевод стихотворений в смайл
Перевод стихотворений в смайл Графика Pascal. Модуль GraphABC
Графика Pascal. Модуль GraphABC WinApi. Основные типы данных
WinApi. Основные типы данных Кадры для цифровой промышленности. Создание законченных проектно-конструкторских решений
Кадры для цифровой промышленности. Создание законченных проектно-конструкторских решений Структуры данных. Система непересекающихся множеств
Структуры данных. Система непересекающихся множеств Строки. Функции для работы со строками. Строки, как параметры функций. (Лекция 12)
Строки. Функции для работы со строками. Строки, как параметры функций. (Лекция 12) Предоставление доступа к документам компьютера локальной сети
Предоставление доступа к документам компьютера локальной сети Первые ОС для персональных компьютеров
Первые ОС для персональных компьютеров Расшифровка сокращений в детализации и Мобильной детализации
Расшифровка сокращений в детализации и Мобильной детализации Designing Security for Microsoft® Networks
Designing Security for Microsoft® Networks Базовый курс SQL. Хранимые процедуры
Базовый курс SQL. Хранимые процедуры Складання та виконання алгоритмів з повторенням у середовищі Scratch. Практична робота №3. 7 клас
Складання та виконання алгоритмів з повторенням у середовищі Scratch. Практична робота №3. 7 клас Значение САПР
Значение САПР КОМПЬЮТЕРНЫЕ ВИРУСЫ И ЗАЩИТА ОТ НИХ Выполнили ученицы 10 класса «Б» Степанова Алёна и Толстова Мария Учитель Мухатдинова Г.Н.
КОМПЬЮТЕРНЫЕ ВИРУСЫ И ЗАЩИТА ОТ НИХ Выполнили ученицы 10 класса «Б» Степанова Алёна и Толстова Мария Учитель Мухатдинова Г.Н. Язык программирования JAVA. 1 занятие Hello!
Язык программирования JAVA. 1 занятие Hello! Обеспечение АИС
Обеспечение АИС Формы. Виды форм. Назначение и источники форм
Формы. Виды форм. Назначение и источники форм Презентация на тему Компьютер как источник переменного электромагнитного поля.
Презентация на тему Компьютер как источник переменного электромагнитного поля.  Операции с матрицами в MatLab 7
Операции с матрицами в MatLab 7 Основы алгоритмизации и программирования
Основы алгоритмизации и программирования Компьютерные вирусы: методы распространения, профилактика заражения
Компьютерные вирусы: методы распространения, профилактика заражения