Разработка программного комплекса с предиктивной коррекцией ошибок управления (на примере ООО Центр инновационных разработок)
- Разработка программного комплекса с предиктивной коррекцией ошибок управления (на примере ООО Центр инновационных разработок)

Содержание
- 2. Введение
- 3. Постановка задачи Разработать встроенное приложение для управления универсальной роботизированной платформой-носителем с предиктивной системой коррекции ошибок управления
- 4. Требования к разработке Реализовать аппаратную часть платформы-носителя Реализовать SDK для сторонних разработчиков внешних модулей Реализовать возможность
- 5. Проектирование и реализация
- 6. Проектирование
- 7. Проектирование
- 8. Протокол передачи команд движения
- 9. Схема архитектуры программы
- 10. Функциональная схема
- 11. Аппаратная схема
- 12. Разработка: парсинг входных данных
- 13. Разработка: MPU
- 14. Разработка: фильтры
- 15. Тестирование и отладка
- 16. Тестирование и отладка
- 17. Демонстрация
- 19. Выводы Преимущества: Быстрая реакция на команды управления; Интуитивное управление, позволяющее работать в визуальном режиме; Подробная телеметрия
- 21. Благодарности ООО «Инноцентр ВАО» ВИТ «ЭРА» Технический Университет Дрездена
- 23. Скачать презентацию
Введение
Введение
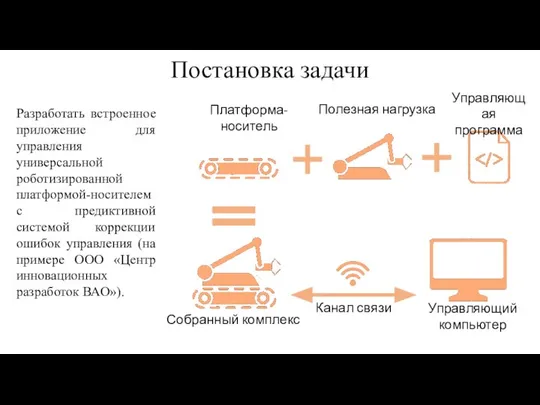
Постановка задачи
Разработать встроенное приложение для управления универсальной роботизированной платформой-носителем с предиктивной
Постановка задачи
Разработать встроенное приложение для управления универсальной роботизированной платформой-носителем с предиктивной

Требования к разработке
Реализовать аппаратную часть платформы-носителя
Реализовать SDK для сторонних разработчиков внешних
Требования к разработке
Реализовать аппаратную часть платформы-носителя
Реализовать SDK для сторонних разработчиков внешних
Проектирование и реализация
Проектирование и реализация
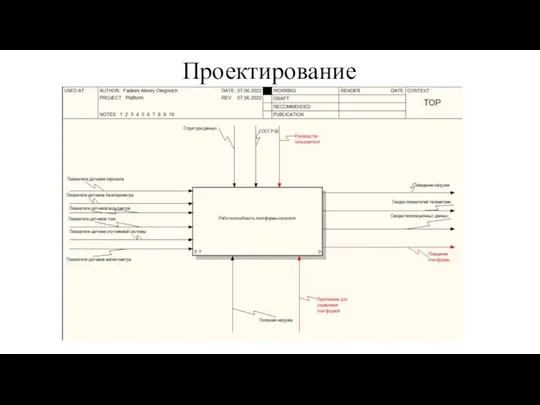
Проектирование
Проектирование
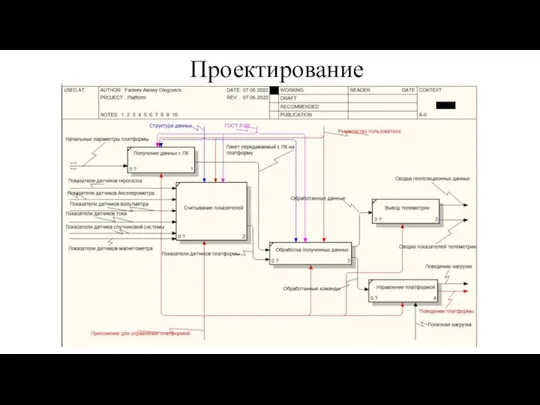
Проектирование
Проектирование

Протокол передачи команд движения
Протокол передачи команд движения
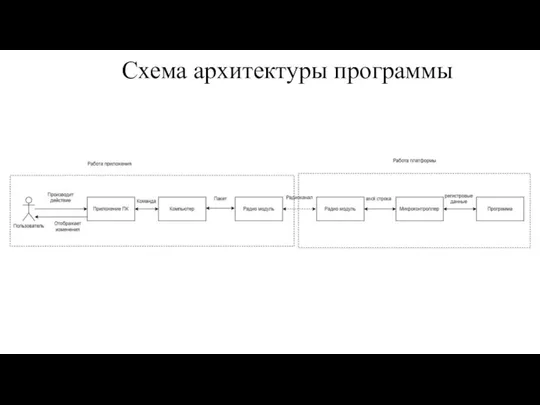
Схема архитектуры программы
Схема архитектуры программы
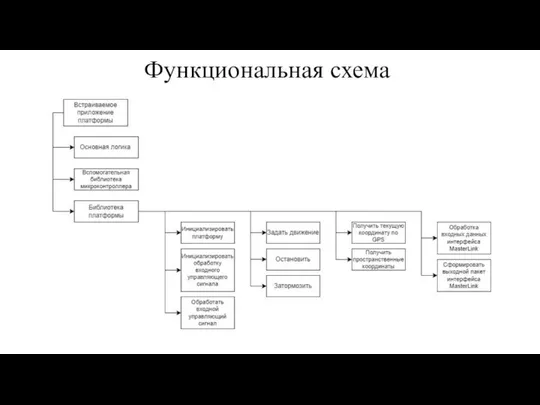
Функциональная схема
Функциональная схема

Аппаратная схема
Аппаратная схема
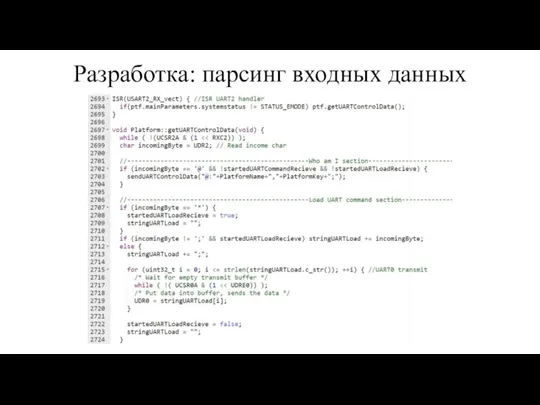
Разработка: парсинг входных данных
Разработка: парсинг входных данных
Разработка: MPU
Разработка: MPU
Разработка: фильтры
Разработка: фильтры

Тестирование и отладка
Тестирование и отладка

Тестирование и отладка
Тестирование и отладка
Демонстрация
Демонстрация


Выводы
Преимущества:
Быстрая реакция на команды управления;
Интуитивное управление, позволяющее работать в
Выводы
Преимущества:
Быстрая реакция на команды управления;
Интуитивное управление, позволяющее работать в

Благодарности
ООО «Инноцентр ВАО»
ВИТ «ЭРА»
Технический Университет
Дрездена
Благодарности
ООО «Инноцентр ВАО»
ВИТ «ЭРА»
Технический Университет
Дрездена
 Требования к оформлению текста проектной (учебно - исследовательской) работы учащегося
Требования к оформлению текста проектной (учебно - исследовательской) работы учащегося Mind Map For PowerPoint
Mind Map For PowerPoint Презентация "Облачные вычисления" - скачать презентации по Информатике
Презентация "Облачные вычисления" - скачать презентации по Информатике SMО и SMM-технологии в работе PR-щика
SMО и SMM-технологии в работе PR-щика Компьютерная графика. Обработка графической информации
Компьютерная графика. Обработка графической информации Закрашивание замкнутой области и рисование прямоугольника
Закрашивание замкнутой области и рисование прямоугольника Практическая работа №25 (1). Создание конфигурации ИС предприятия
Практическая работа №25 (1). Создание конфигурации ИС предприятия Проверочная работа 5 класс Информация. Информатика. Компьютер
Проверочная работа 5 класс Информация. Информатика. Компьютер  Законы управления при использовании информационных систем управления
Законы управления при использовании информационных систем управления Возможности электронных таблиц. Лекция 6
Возможности электронных таблиц. Лекция 6 Практическое использование XML Ростислав Титов Группа е-бизнеса отдела ИТ ЦЕРН – Женева, Швейцария
Практическое использование XML Ростислав Титов Группа е-бизнеса отдела ИТ ЦЕРН – Женева, Швейцария  Презентация "MSC.Mvision Workshop 1" - скачать презентации по Информатике
Презентация "MSC.Mvision Workshop 1" - скачать презентации по Информатике Санау системасы. БДЭ информатика
Санау системасы. БДЭ информатика Профессиональная работа с клавиатурой
Профессиональная работа с клавиатурой Информация, виды информации и способы ее представления. 9 класс
Информация, виды информации и способы ее представления. 9 класс Базы данных Подготовка к ГИА Задания В12
Базы данных Подготовка к ГИА Задания В12 Компьютерная графика. Обработка графической информации
Компьютерная графика. Обработка графической информации Frontazas
Frontazas Презентация по информатике на тему: «Хранение информации»
Презентация по информатике на тему: «Хранение информации»  BGF information
BGF information Информационная и художественная природа телевизионного изображения (урок 2, 8 класс)
Информационная и художественная природа телевизионного изображения (урок 2, 8 класс) YOUTUBE
YOUTUBE Моделирование бизнес-процессов
Моделирование бизнес-процессов Элементы алгебры логики. Математические основы информатики
Элементы алгебры логики. Математические основы информатики Разработка стратегии развития информационных технологий
Разработка стратегии развития информационных технологий  Презентация "Решение неравенств в электронных таблицах Excel" - скачать презентации по Информатике
Презентация "Решение неравенств в электронных таблицах Excel" - скачать презентации по Информатике СЭД directum установка и настройка
СЭД directum установка и настройка Публикационная активность факультетов и институтов
Публикационная активность факультетов и институтов