- Составление программы движения робота по окружности на языке VPL

Содержание
- 2. Постановка задачи Одним из первых бытовых роботов был робот-пылесос Roomba, разработанный в 2002 году компанией iRoomba.
- 3. Вопросы для повторения Назовите базовые активности языка VPL. Опишите структуру активности Data (данные). Посредством чего активности
- 4. Какие активности нужны? Data – для ввода данных (радиус окружности и скорость робота). Join – для
- 5. В каком случае робот едет по окружности? Если напряжение, подаваемое на одно колесо робота равно напряжению
- 6. Создание сервиса, рассчитывающего напряжение Поместим на диаграмму активность Назовем ее TurningRadius Дважды щелкнем на иконке активности,
- 7. Схема сервиса
- 8. Описание входных и выходных данных для сервиса Вернемся в окно диаграммы. Опишем входные данные для сервиса
- 9. Подключение робота-симулятора iRobotCreate В свойствах сервиса GeneticDifferentialDrive выберем симулятор робота iRobotCreate.
- 10. Тестирование программы Запустите программу и понаблюдайте за движением робота. Поэкспериментируйте с программой: увеличьте радиус движения и
- 11. Заключительное задание Напишите мини-эссе от имени двух роботов: iRoomboCreate и Lego Nxt Tribot о том, как
- 13. Скачать презентацию
Постановка задачи
Одним из первых бытовых роботов был робот-пылесос Roomba, разработанный в
Постановка задачи
Одним из первых бытовых роботов был робот-пылесос Roomba, разработанный в
Вопросы для повторения
Назовите базовые активности языка VPL.
Опишите структуру активности Data (данные).
Посредством
Вопросы для повторения
Назовите базовые активности языка VPL.
Опишите структуру активности Data (данные).
Посредством
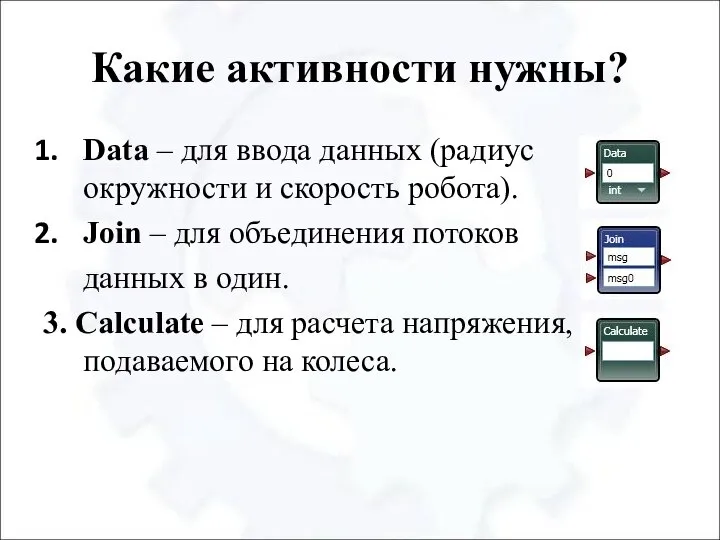
Какие активности нужны?
Data – для ввода данных (радиус окружности и скорость
Какие активности нужны?
Data – для ввода данных (радиус окружности и скорость
В каком случае робот едет
по окружности?
Если напряжение, подаваемое на одно
В каком случае робот едет
по окружности?
Если напряжение, подаваемое на одно
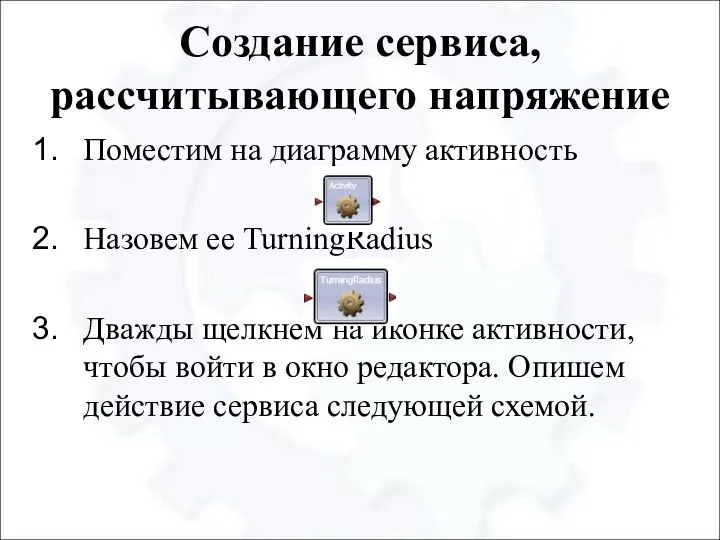
Создание сервиса, рассчитывающего напряжение
Поместим на диаграмму активность
Назовем ее TurningRadius
Дважды щелкнем
Создание сервиса, рассчитывающего напряжение
Поместим на диаграмму активность
Назовем ее TurningRadius
Дважды щелкнем

Схема сервиса
Схема сервиса
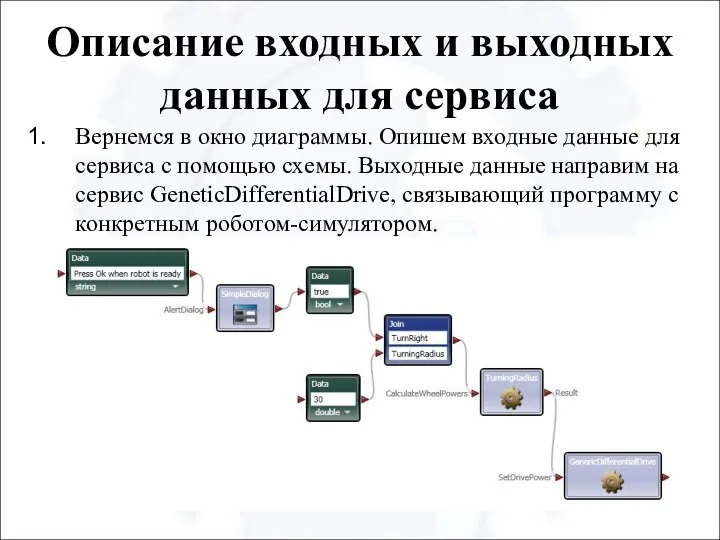
Описание входных и выходных данных для сервиса
Вернемся в окно диаграммы. Опишем
Описание входных и выходных данных для сервиса
Вернемся в окно диаграммы. Опишем
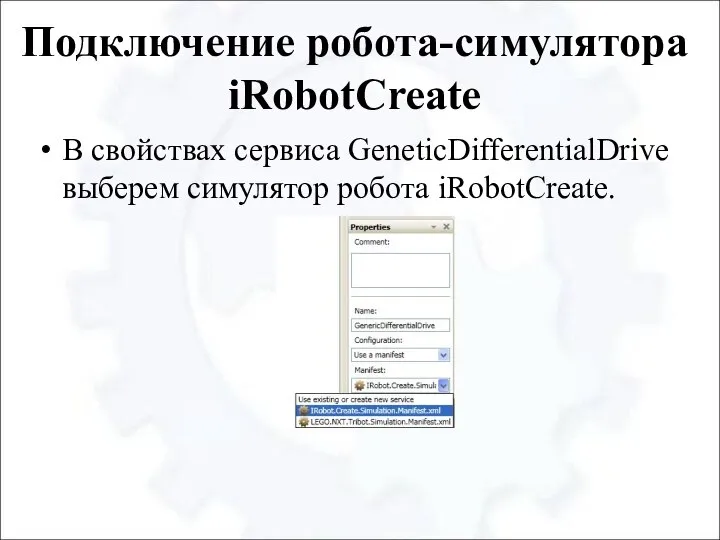
Подключение робота-симулятора iRobotCreate
В свойствах сервиса GeneticDifferentialDrive выберем симулятор робота iRobotCreate.
Подключение робота-симулятора iRobotCreate
В свойствах сервиса GeneticDifferentialDrive выберем симулятор робота iRobotCreate.
Тестирование программы
Запустите программу и понаблюдайте за движением робота.
Поэкспериментируйте с программой: увеличьте
Тестирование программы
Запустите программу и понаблюдайте за движением робота.
Поэкспериментируйте с программой: увеличьте
Заключительное задание
Напишите мини-эссе от имени двух роботов: iRoomboCreate и Lego Nxt
Заключительное задание
Напишите мини-эссе от имени двух роботов: iRoomboCreate и Lego Nxt
 Информация и её кодирование. Способы измерения информации
Информация и её кодирование. Способы измерения информации Работа судебных участков мировых судей с сервисами ГАС Правосудие
Работа судебных участков мировых судей с сервисами ГАС Правосудие Презентация "Обнаружение атак - 6" - скачать презентации по Информатике
Презентация "Обнаружение атак - 6" - скачать презентации по Информатике Средства вычислительной техники
Средства вычислительной техники Аттестационная работа. Выполнение исследовательской работы по информатике в области исследования безопасности в интернет
Аттестационная работа. Выполнение исследовательской работы по информатике в области исследования безопасности в интернет Принципы построения информационных систем в таможенной логистике
Принципы построения информационных систем в таможенной логистике Путешествие по клавишам
Путешествие по клавишам Ао Компания ТрансТелеКом. Коммутация
Ао Компания ТрансТелеКом. Коммутация Процессы программной инженерии. Реализация и изменение процессов (Часть 1)
Процессы программной инженерии. Реализация и изменение процессов (Часть 1) АСУП / ERP Автоматизированные системы управления предприятием
АСУП / ERP Автоматизированные системы управления предприятием Базы данных
Базы данных Схема транспортного предпроцессинга для НСПК
Схема транспортного предпроцессинга для НСПК SmileStudio. First Walck. Игра
SmileStudio. First Walck. Игра Аттестационная работа. Организация проектной и исследовательской деятельности на уроках информатики
Аттестационная работа. Организация проектной и исследовательской деятельности на уроках информатики Сегментація мереж з використанням комутаторів
Сегментація мереж з використанням комутаторів Что такое биоинформатика? Банк SwissProt С.А.Спирин 7, 8,10 февраля 2006 г., ФББ МГУ
Что такое биоинформатика? Банк SwissProt С.А.Спирин 7, 8,10 февраля 2006 г., ФББ МГУ  Файли. Прийоми роботи з файлами
Файли. Прийоми роботи з файлами Презентация "Что такое ВКонтакте?" - скачать презентации по Информатике
Презентация "Что такое ВКонтакте?" - скачать презентации по Информатике HTML и CSS. Metatags. (Лекция 6)
HTML и CSS. Metatags. (Лекция 6) База данных
База данных Вивчаємо інформатику. 10 клас
Вивчаємо інформатику. 10 клас Презентация на тему Работа со шрифтами
Презентация на тему Работа со шрифтами  Для клана Миллениум
Для клана Миллениум Групповая деятельность на уроках информатики
Групповая деятельность на уроках информатики Технология создания телесюжета
Технология создания телесюжета Логические операции. Построение таблиц истинности
Логические операции. Построение таблиц истинности Программное обеспечение персонального компьютера. Операционная система
Программное обеспечение персонального компьютера. Операционная система Технические и программные средства реализации информационных процессов
Технические и программные средства реализации информационных процессов