- Калибровка камер

Содержание
- 2. Определение Калибровка камеры — это задача получения внутренних и внешних параметров камеры по имеющимся фотографиям или
- 3. Дисторсии Нулевая дисторсия Положительная дисторсия “подушка” Отрицательная дисторсия “бочка” distortio — искривление, коэффициент линейного увеличения изменяется
- 4. Радиальные искажения возникают в результате формы объектива Тангенциальные искажения возникают как результат сборки камеры в целом.
- 5. Радиальные искажения Линзы реальных камер часто искажают расположении пикселей вблизи краев фотоприёмника. Это выпуклое явление появляется
- 6. Тангенциальные искажения возникают в результате производственных дефектов, возникающих от не точно параллельно установленных линз к плоскости
- 7. Существует ещё множество других видов искажений, которые возникают в системах визуализации, но они, как правило, имеют
- 8. OpenCV предоставляет несколько алгоритмов для вычисления внутренних параметров. Калибровка выполняется при помощи функции cvCalibrateCamera2(). В данной
- 9. Для каждого кадра, содержащего определенный объект, существует возможность описать позу данного объекта по отношению к системе
- 10. Что может быть калибровочным объектом Калибровочным объектом в OpenCV является плоская сетка с чередующимися черными и
- 11. Калибровка «Шахматной доской» в opencv Изображение шахматной доски (или изображение человека, держащего шахматную доску) можно использовать
- 12. Субпиксельные углы Углы, возвращаемые cvFindChessboardCorners() являются приблизительными. На практике это означает, что положения точны только в
- 13. Гомография В компьютерном зрении плоская гомография определяется как проективное отображение из одной плоскости в другую. Таким
- 14. Математика преобразований
- 15. Количество неизвестных Вращение 3 угла Перемещение 3 смещения Это нормально, т.к. известно, что плоский объект (например,
- 16. Теперь пусть имеется N углов и K изображений шахматной доски (в различных позициях). Как много представлений
- 17. Ну и как считать? Матрица гомографии H связывает положения точек плоскости исходного изображения с точками плоскости
- 18. А как параметры камеры вычислить? Функция калибровки После получения углов от нескольких изображений можно вызывать функцию
- 19. Не все так просто Для того, чтобы воспользоваться алгоритмом в cvCalibrateCamera2(). необходимо Воспользоваться функцией cvUndistort2(), которая
- 20. Стереокалибровка и стереозрение 1. Математически удаляются радиальные и тангенциальные искажения объектива . На выходе будет получено
- 21. Как можно получить глубину?
- 22. Горизонтально ровно и фронтально параллельно
- 23. Эпиполярная геометрия 2 камеры обскуры Керновые точки – центр проекции изображения другой камеры Керновая плоскость: p
- 24. Зачем предыдущий слайд? Каждая трехмерная точка представлений камер располагается на эпиполярной плоскости, которая пересекает каждое изображение
- 25. Еще 2 матрицы Существенная Е - перемещение и смещение камер в пространстве Фундаментальная F - как
- 26. Как в OpenCV Аалогично с калибровкой одной камеры предоставляем изображения шахматной доски, снятые правой и левой
- 28. Карты глубины трехмерного перепроецирования cvReprojectImageTo3D()
- 29. Фотограмметрическая калибровка Калибровка камер производится наблюдением за калибровочным объектом, геометрия которого в 3D пространстве известна с
- 30. по снимкам пространственного тест-объекта
- 31. Установка калибровочных маркеров
- 32. Съемка стенда
- 33. по снимкам плоского тест-объекта Определение параметров фотограмметрической калибровки по полученным таким образом снимкам производится в результате
- 34. Самокалибровка Не использует калибровочных объектов. Использует движение камеры в статической сцене. Если изображения будут браться от
- 35. Технология, представленная Zhengyou Zhang требует только камеру для наблюдения за плоским объектом, показанным с нескольких сторон
- 36. Объективом с переменным фокусным расстоянием Способ предложила Марина Колесник в своей статье «Техника калибровки для объективов
- 37. Калибровка с помощью нейронных сетей и генетических алгоритмов вход – искаженные изображения выход – выпрямленные на
- 39. Скачать презентацию
Определение
Калибровка камеры — это задача получения внутренних и внешних параметров камеры по
Определение
Калибровка камеры — это задача получения внутренних и внешних параметров камеры по
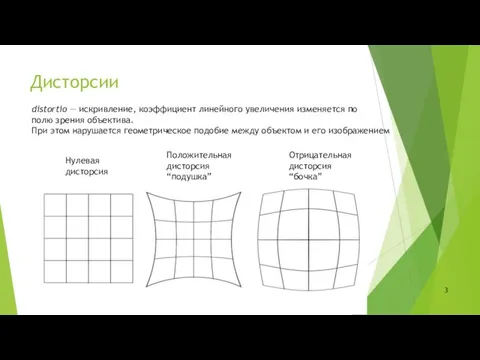
Дисторсии
Нулевая дисторсия
Положительная
дисторсия
“подушка”
Отрицательная
дисторсия
“бочка”
distortio — искривление, коэффициент линейного увеличения изменяется по
Дисторсии
Нулевая дисторсия
Положительная
дисторсия
“подушка”
Отрицательная
дисторсия
“бочка”
distortio — искривление, коэффициент линейного увеличения изменяется по

Радиальные искажения возникают в результате формы объектива
Тангенциальные искажения возникают как результат сборки камеры в целом.
Радиальные искажения возникают в результате формы объектива
Тангенциальные искажения возникают как результат сборки камеры в целом.
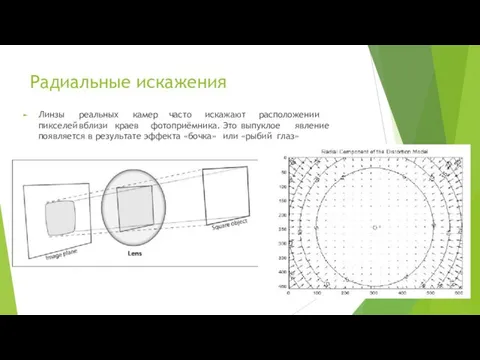
Радиальные искажения
Линзы реальных камер часто искажают расположении пикселей вблизи краев фотоприёмника. Это выпуклое явление появляется в результате эффекта «бочка» или «рыбий глаз»
Радиальные искажения
Линзы реальных камер часто искажают расположении пикселей вблизи краев фотоприёмника. Это выпуклое явление появляется в результате эффекта «бочка» или «рыбий глаз»
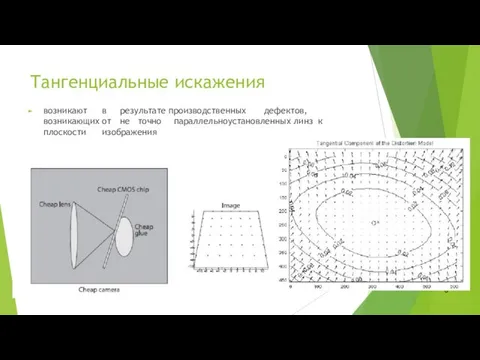
Тангенциальные искажения
возникают в результате производственных дефектов, возникающих от не точно параллельно установленных линз к плоскости изображения
Тангенциальные искажения
возникают в результате производственных дефектов, возникающих от не точно параллельно установленных линз к плоскости изображения

Существует ещё множество других видов искажений, которые возникают в системах визуализации, но они, как правило, имеют малый эффект по сравнению с радиальным и тангенциальным искажениями. С вязи с эти данные (другие) искажения далее рассматриваться не будут.
Существует ещё множество других видов искажений, которые возникают в системах визуализации, но они, как правило, имеют малый эффект по сравнению с радиальным и тангенциальным искажениями. С вязи с эти данные (другие) искажения далее рассматриваться не будут.
OpenCV предоставляет несколько алгоритмов для вычисления внутренних параметров. Калибровка выполняется при помощи функции cvCalibrateCamera2().
В данной функции метод калибровки предоставленной камеры заключается в формировании структуры, содержащей множество индивидуальных и идентифицируемых точек. При рассмотрении данной структуры под разными углами можно в последующем вычислить (относительное) положение и ориентацию камеры во время каждого получаемого кадра, а также внутренние параметры камеры. Для получения набора представлений, необходимо поворачивать и смещать объект, поэтому вначале необходимо рассмотреть эти процессы более подробно.
OpenCV предоставляет несколько алгоритмов для вычисления внутренних параметров. Калибровка выполняется при помощи функции cvCalibrateCamera2().
В данной функции метод калибровки предоставленной камеры заключается в формировании структуры, содержащей множество индивидуальных и идентифицируемых точек. При рассмотрении данной структуры под разными углами можно в последующем вычислить (относительное) положение и ориентацию камеры во время каждого получаемого кадра, а также внутренние параметры камеры. Для получения набора представлений, необходимо поворачивать и смещать объект, поэтому вначале необходимо рассмотреть эти процессы более подробно.
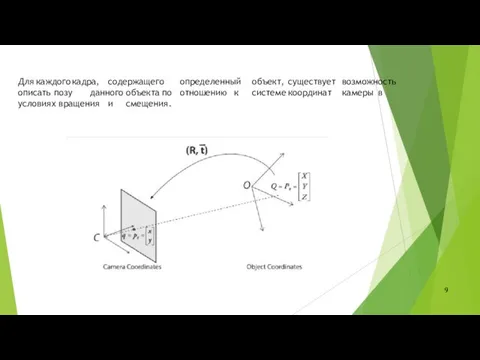
Для каждого кадра, содержащего определенный объект, существует возможность
описать позу данного объекта по отношению к системе координат камеры в условиях вращения и смещения.
Для каждого кадра, содержащего определенный объект, существует возможность
описать позу данного объекта по отношению к системе координат камеры в условиях вращения и смещения.
Что может быть калибровочным объектом
Калибровочным объектом в OpenCV является плоская сетка с чередующимися черными и белыми квадратами, которую обычно называют "шахматной доской" (хотя и не обязательно иметь восемь квадратов или даже равное количество квадратов в каждом из направлений).
В принципе, любой достаточно характерный объект может быть использован в качестве калибровочного объекта, однако, практичней всего использовать такой шаблон, как шахматная доска.
Что может быть калибровочным объектом
Калибровочным объектом в OpenCV является плоская сетка с чередующимися черными и белыми квадратами, которую обычно называют "шахматной доской" (хотя и не обязательно иметь восемь квадратов или даже равное количество квадратов в каждом из направлений).
В принципе, любой достаточно характерный объект может быть использован в качестве калибровочного объекта, однако, практичней всего использовать такой шаблон, как шахматная доска.

Калибровка «Шахматной доской» в opencv
Изображение шахматной доски (или изображение человека, держащего шахматную доску) можно использовать в функции
Калибровка «Шахматной доской» в opencv
Изображение шахматной доски (или изображение человека, держащего шахматную доску) можно использовать в функции
Субпиксельные углы
Углы, возвращаемые cvFindChessboardCorners() являются приблизительными. На практике это означает, что положения точны только в пределах устройства обработки изображения, т.е. с точностью до пикселя. Функция разделения должна быть использована для вычисления точного расположения углов (после
Субпиксельные углы
Углы, возвращаемые cvFindChessboardCorners() являются приблизительными. На практике это означает, что положения точны только в пределах устройства обработки изображения, т.е. с точностью до пикселя. Функция разделения должна быть использована для вычисления точного расположения углов (после
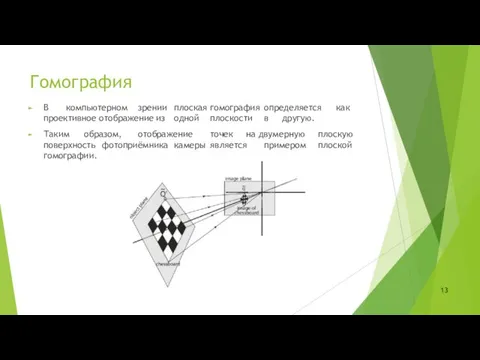
Гомография
В компьютерном зрении плоская гомография определяется как проективное отображение из одной плоскости в другую.
Таким образом, отображение точек на двумерную плоскую поверхность фотоприёмника камеры является примером плоской гомографии.
Гомография
В компьютерном зрении плоская гомография определяется как проективное отображение из одной плоскости в другую.
Таким образом, отображение точек на двумерную плоскую поверхность фотоприёмника камеры является примером плоской гомографии.

Математика преобразований
Математика преобразований
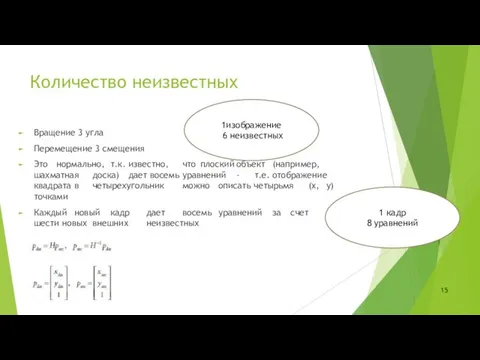
Количество неизвестных
Вращение 3 угла
Перемещение 3 смещения
Это нормально, т.к. известно, что плоский объект (например, шахматная доска) дает восемь уравнений - т.е. отображение квадрата в четырехугольник можно описать четырьмя (x, y) точками
Каждый новый кадр дает восемь уравнений за счет шести новых внешних неизвестных
1изображение
Количество неизвестных
Вращение 3 угла
Перемещение 3 смещения
Это нормально, т.к. известно, что плоский объект (например, шахматная доска) дает восемь уравнений - т.е. отображение квадрата в четырехугольник можно описать четырьмя (x, y) точками
Каждый новый кадр дает восемь уравнений за счет шести новых внешних неизвестных
1изображение

Теперь пусть имеется N углов и K изображений шахматной доски (в различных позициях). Как много представлений и углов необходимо иметь для преодоления ограничений всех ранее представленных параметров?
K изображений шахматной доски обеспечивает 2NK ограничений (коэффициент 2 используется в связи с тем, что каждая точка изображения имеет две координаты (x, y)
Не принимая во внимание параметры искажения, имеется 4 внутренних параметра и 6K внешних параметра (т.к. необходимо найти 6 параметров положения шахматной доски для каждого представления K)
Для решения также необходимо, чтобы 2NK ≥ 6K + 4 (или, что эквивалентно (N – 3)K ≥
Теперь пусть имеется N углов и K изображений шахматной доски (в различных позициях). Как много представлений и углов необходимо иметь для преодоления ограничений всех ранее представленных параметров?
K изображений шахматной доски обеспечивает 2NK ограничений (коэффициент 2 используется в связи с тем, что каждая точка изображения имеет две координаты (x, y)
Не принимая во внимание параметры искажения, имеется 4 внутренних параметра и 6K внешних параметра (т.к. необходимо найти 6 параметров положения шахматной доски для каждого представления K)
Для решения также необходимо, чтобы 2NK ≥ 6K + 4 (или, что эквивалентно (N – 3)K ≥
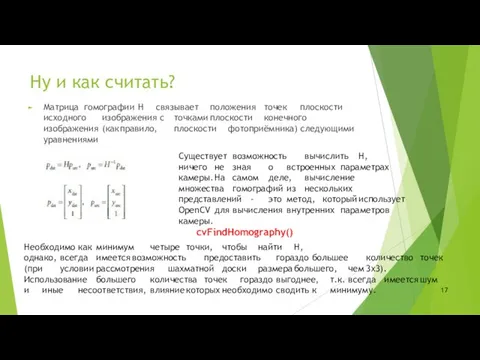
Ну и как считать?
Матрица гомографии H связывает положения точек плоскости исходного изображения с точками плоскости конечного изображения (как правило, плоскости фотоприёмника) следующими уравнениями
Существует возможность вычислить H,
ничего не зная о встроенных параметрах камеры. На самом деле, вычисление
множества гомографий из нескольких представлений - это метод, который использует
OpenCV для вычисления внутренних параметров
Ну и как считать?
Матрица гомографии H связывает положения точек плоскости исходного изображения с точками плоскости конечного изображения (как правило, плоскости фотоприёмника) следующими уравнениями
Существует возможность вычислить H,
ничего не зная о встроенных параметрах камеры. На самом деле, вычисление
множества гомографий из нескольких представлений - это метод, который использует
OpenCV для вычисления внутренних параметров
А как параметры камеры вычислить?
Функция калибровки
После получения углов от нескольких изображений можно вызывать функцию cvCalibrateCamera2(). Эта функция производит математические вычисления и предоставляет необходимую информацию.
В частности, в результате будет получена
матрица внутренних параметров камеры,
коэффициенты искажения,
вектор вращения и
А как параметры камеры вычислить?
Функция калибровки
После получения углов от нескольких изображений можно вызывать функцию cvCalibrateCamera2(). Эта функция производит математические вычисления и предоставляет необходимую информацию.
В частности, в результате будет получена
матрица внутренних параметров камеры,
коэффициенты искажения,
вектор вращения и
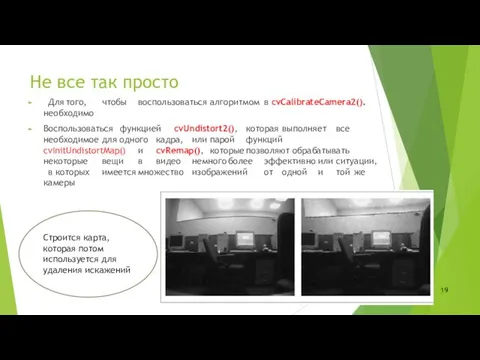
Не все так просто
Для того, чтобы воспользоваться алгоритмом в cvCalibrateCamera2(). необходимо
Воспользоваться функцией cvUndistort2(), которая выполняет все необходимое для одного кадра, или парой функций cvInitUndistortMap() и cvRemap(), которые позволяют обрабатывать некоторые вещи в видео немного более эффективно или ситуации, в которых имеется множество изображений от одной и той же камеры
Строится карта, которая
Не все так просто
Для того, чтобы воспользоваться алгоритмом в cvCalibrateCamera2(). необходимо
Воспользоваться функцией cvUndistort2(), которая выполняет все необходимое для одного кадра, или парой функций cvInitUndistortMap() и cvRemap(), которые позволяют обрабатывать некоторые вещи в видео немного более эффективно или ситуации, в которых имеется множество изображений от одной и той же камеры
Строится карта, которая
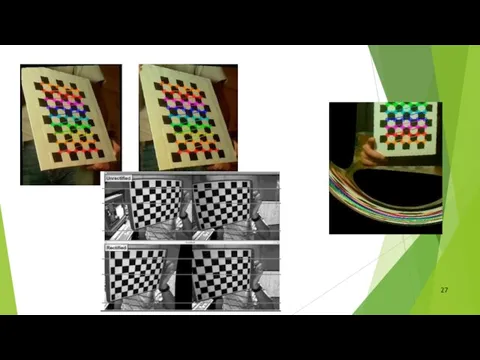
Стереокалибровка и стереозрение
1. Математически удаляются радиальные и тангенциальные искажения объектива . На выходе будет получено неискаженное изображение.
2. Настраиваются углы и расстояния между камерами, так называемый процесс уточнения. На выходе будут получены выровненные по строкам
3. Ищутся особенности на представлениях левой и правой камер (процесс сопоставления). На выходе будет получена карта несоответствий, где различия будут соответствовать различиям в x-координате плоскости изображения для одного и того же рассматриваемого
Стереокалибровка и стереозрение
1. Математически удаляются радиальные и тангенциальные искажения объектива . На выходе будет получено неискаженное изображение.
2. Настраиваются углы и расстояния между камерами, так называемый процесс уточнения. На выходе будут получены выровненные по строкам
3. Ищутся особенности на представлениях левой и правой камер (процесс сопоставления). На выходе будет получена карта несоответствий, где различия будут соответствовать различиям в x-координате плоскости изображения для одного и того же рассматриваемого

Как можно получить глубину?
Как можно получить глубину?
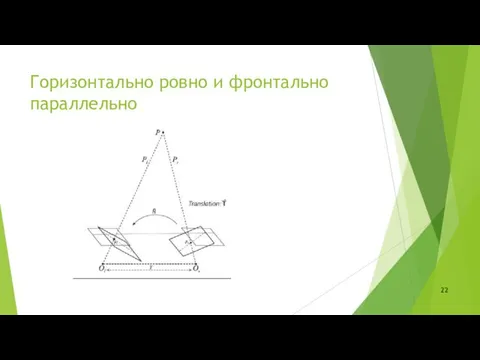
Горизонтально ровно и фронтально параллельно
Горизонтально ровно и фронтально параллельно
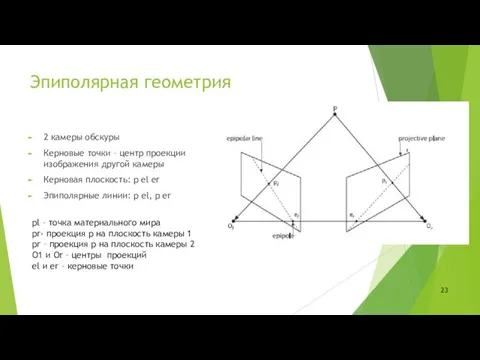
Эпиполярная геометрия
2 камеры обскуры
Керновые точки – центр проекции изображения другой камеры
Керновая
Эпиполярная геометрия
2 камеры обскуры
Керновые точки – центр проекции изображения другой камеры
Керновая
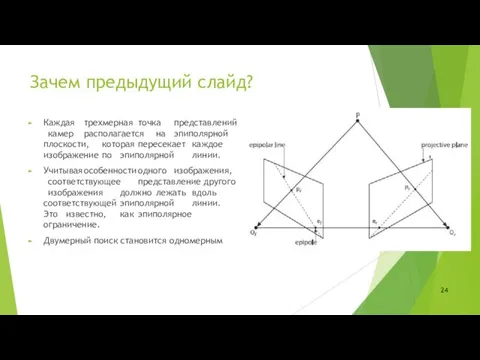
Зачем предыдущий слайд?
Каждая трехмерная точка представлений камер располагается на эпиполярной плоскости, которая пересекает каждое изображение по эпиполярной линии.
Учитывая особенности одного изображения, соответствующее представление другого изображения должно лежать вдоль соответствующей эпиполярной линии. Это известно, как эпиполярное ограничение.
Двумерный поиск становится одномерным
Зачем предыдущий слайд?
Каждая трехмерная точка представлений камер располагается на эпиполярной плоскости, которая пересекает каждое изображение по эпиполярной линии.
Учитывая особенности одного изображения, соответствующее представление другого изображения должно лежать вдоль соответствующей эпиполярной линии. Это известно, как эпиполярное ограничение.
Двумерный поиск становится одномерным

Еще 2 матрицы
Существенная Е - перемещение и смещение камер в пространстве
Фундаментальная
Еще 2 матрицы
Существенная Е - перемещение и смещение камер в пространстве
Фундаментальная
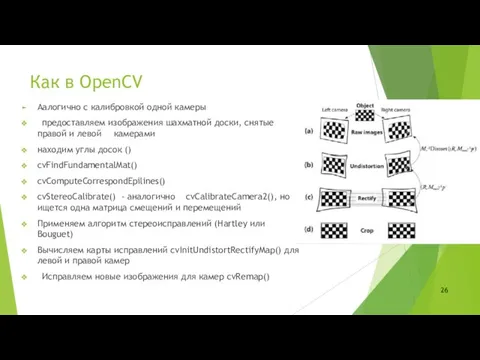
Как в OpenCV
Аалогично с калибровкой одной камеры
предоставляем изображения шахматной доски, снятые
Как в OpenCV
Аалогично с калибровкой одной камеры
предоставляем изображения шахматной доски, снятые

Карты глубины трехмерного перепроецирования
cvReprojectImageTo3D()
Карты глубины трехмерного перепроецирования
cvReprojectImageTo3D()
Фотограмметрическая калибровка
Калибровка камер производится наблюдением за калибровочным объектом, геометрия которого в
Фотограмметрическая калибровка
Калибровка камер производится наблюдением за калибровочным объектом, геометрия которого в

по снимкам пространственного тест-объекта
по снимкам пространственного тест-объекта

Установка калибровочных маркеров
Установка калибровочных маркеров
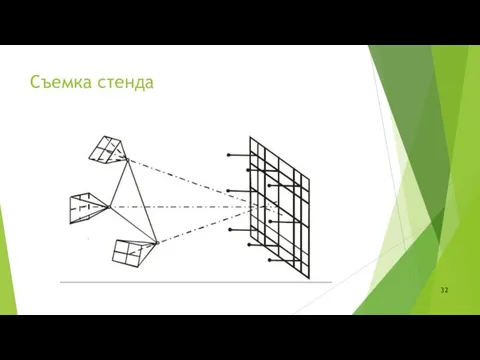
Съемка стенда
Съемка стенда
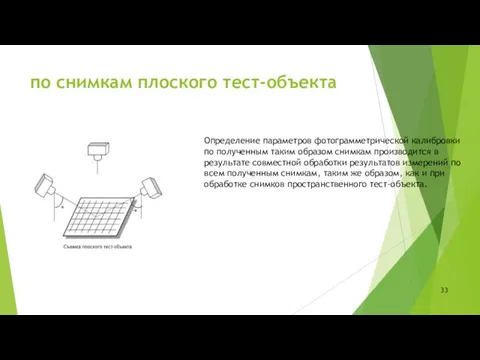
по снимкам плоского тест-объекта
Определение параметров фотограмметрической калибровки по полученным таким образом
по снимкам плоского тест-объекта
Определение параметров фотограмметрической калибровки по полученным таким образом

Самокалибровка
Не использует калибровочных объектов.
Использует движение камеры в статической сцене. Если
Самокалибровка
Не использует калибровочных объектов.
Использует движение камеры в статической сцене. Если
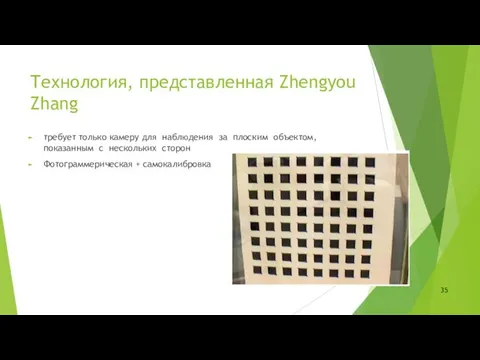
Технология, представленная Zhengyou Zhang
требует только камеру для наблюдения за плоским объектом,
Технология, представленная Zhengyou Zhang
требует только камеру для наблюдения за плоским объектом,
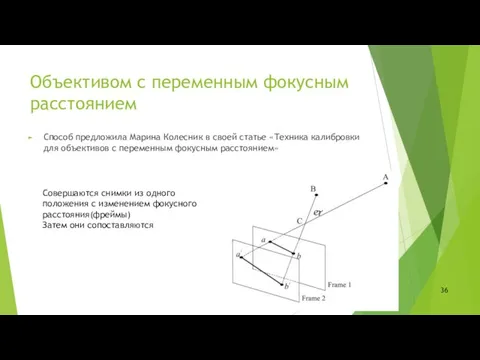
Объективом с переменным фокусным расстоянием
Способ предложила Марина Колесник в своей статье
Объективом с переменным фокусным расстоянием
Способ предложила Марина Колесник в своей статье

Калибровка с помощью нейронных сетей и генетических алгоритмов
вход – искаженные изображения
выход
Калибровка с помощью нейронных сетей и генетических алгоритмов
вход – искаженные изображения
выход
 Письмо маме
Письмо маме Соединение деталей из проволоки различными способами
Соединение деталей из проволоки различными способами Образователь ные заезды молодых деятелей культуры
Образователь ные заезды молодых деятелей культуры Остин Клеон. Газетная/зачеркнутая поэзия, или игра Blackout
Остин Клеон. Газетная/зачеркнутая поэзия, или игра Blackout Русский народный костюм
Русский народный костюм Сатирические образы человека
Сатирические образы человека Кĕсле (гусли)
Кĕсле (гусли) Ақпанның сегізі. Опера театрына барамын
Ақпанның сегізі. Опера театрына барамын Композиция на конкурс Обобщение
Композиция на конкурс Обобщение Vestimentatia traditionala a ucrainenilor
Vestimentatia traditionala a ucrainenilor Исскуство 16-17 вв. Италия и Франция
Исскуство 16-17 вв. Италия и Франция Широкая масленица
Широкая масленица Народные художественные ремесла ( работа с берестой)
Народные художественные ремесла ( работа с берестой) Подмосковные вечера, или посиделки в тапочках
Подмосковные вечера, или посиделки в тапочках С Россией в сердце
С Россией в сердце Вечный двигатель (Перпетуум мобиле)
Вечный двигатель (Перпетуум мобиле) Волшебники парижской моды
Волшебники парижской моды Крестьянский дом как отражение уклада крестьянской жизни и памятник архитектуры. (5 класс)
Крестьянский дом как отражение уклада крестьянской жизни и памятник архитектуры. (5 класс) Тульский самовар
Тульский самовар Орнамент
Орнамент Новосибирский театр музыкальной комедии
Новосибирский театр музыкальной комедии Синтетическое искусство
Синтетическое искусство Декоративно-прикладное искусство и народные промыслы. Содружество традиций
Декоративно-прикладное искусство и народные промыслы. Содружество традиций История прихватки
История прихватки Народная кукла Рождественский Ангел. Мастер класс с пошаговым фото
Народная кукла Рождественский Ангел. Мастер класс с пошаговым фото Қазақ халқының салт-дәстүрлері арқылы қыздарды тәрбиелеу
Қазақ халқының салт-дәстүрлері арқылы қыздарды тәрбиелеу Праздник масленица
Праздник масленица Чеканка
Чеканка