- Дифференциальные уравнения

Содержание
- 3. Описание линейных динамических систем дифференциальными уравнениями
- 4. Преобразование Лапласа f (t) - оригинал F (p) - изображение f(t) ÷ F(p)
- 5. Преобразование Лапласа Если f(t) ÷ F(p) то f'(t) ÷ pF(p) – f(0) f''(t) ÷ p2 F(p)
- 6. Найти изображения следующих оригиналов: E(t) sin(ωt) cos(ωt)
- 7. Решение линейных дифференциальных уравнений с помощью преобразования Лапласа
- 8. Найти передаточные функции по следующей системе уравнений
- 9. Определение процесса регулирования g(t)=E(t)
- 10. Определение процесса регулирования X(p)=W(p)G(p)
- 11. Определение процесса регулирования
- 12. Определение процесса регулирования
- 13. Определение процесса регулирования
- 14. Преобразование Лапласа Пример 5. Найти выходную величин y(t) системы, описываемой уравнением если g(t)=Gм*sin(ωt) y(0)=y0
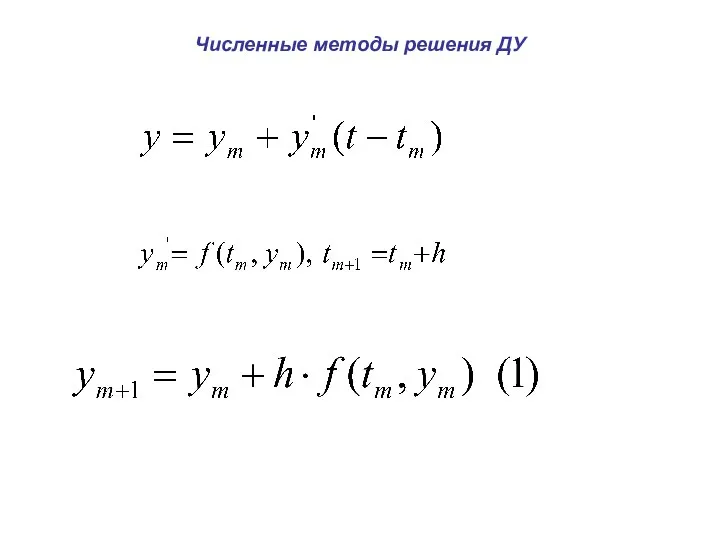
- 15. Численные методы решения дифференциальных уравненрий
- 16. Численные методы решения ДУ
- 17. Численные методы решения ДУ
- 18. Численные методы решения ДУ
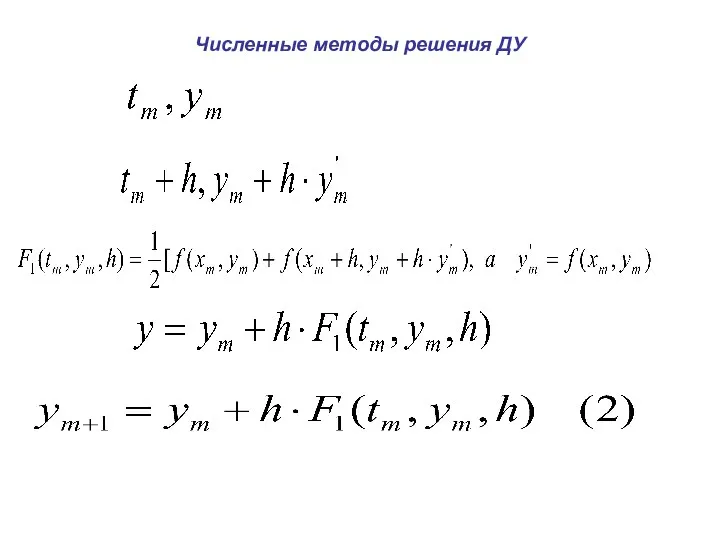
- 19. Численные методы решения ДУ
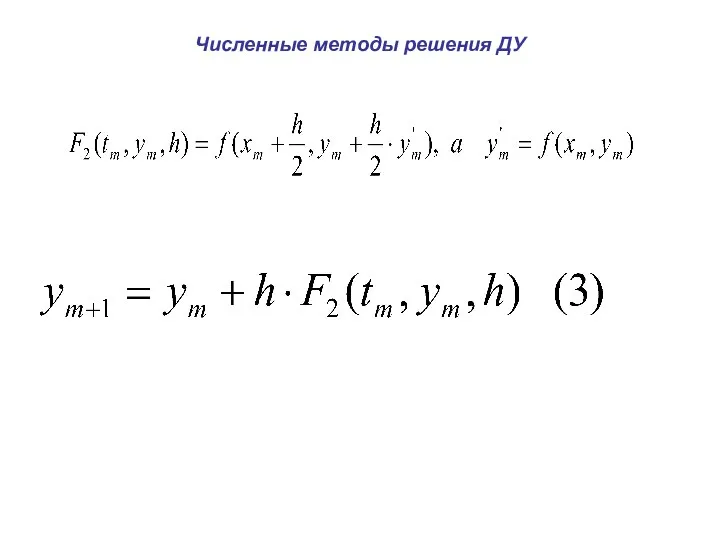
- 20. Численные методы решения ДУ
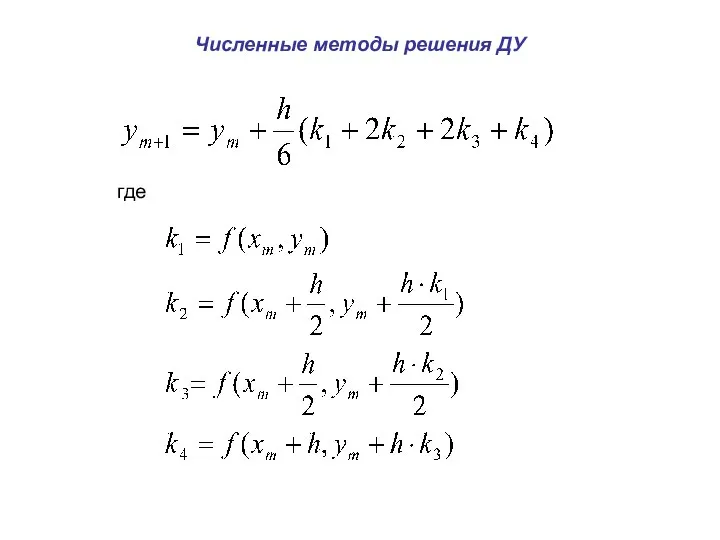
- 21. Численные методы решения ДУ где
- 22. Численные методы решения ДУ
- 23. Численные методы решения ДУ [0,2]; h=0.5
- 24. Численные методы решения ДУ
- 25. Численные методы решения ДУ
- 27. Скачать презентацию
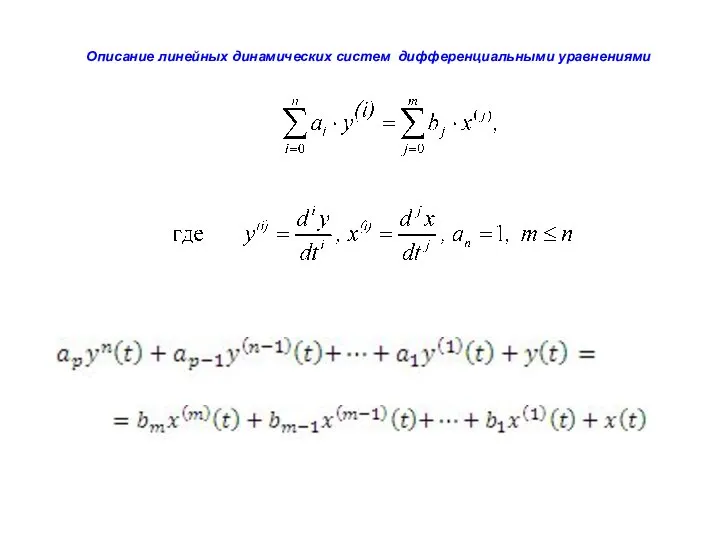
Описание линейных динамических систем дифференциальными уравнениями
Описание линейных динамических систем дифференциальными уравнениями
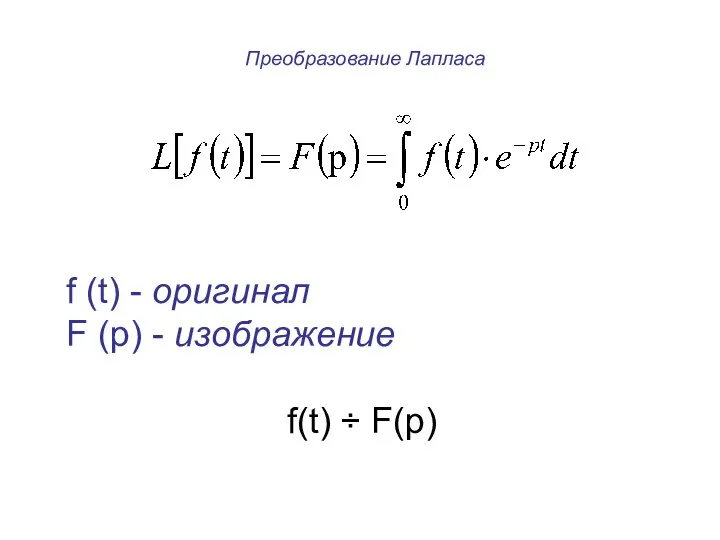
Преобразование Лапласа
f (t) - оригинал
F (p) - изображение
f(t) ÷ F(p)
Преобразование Лапласа
f (t) - оригинал
F (p) - изображение
f(t) ÷ F(p)
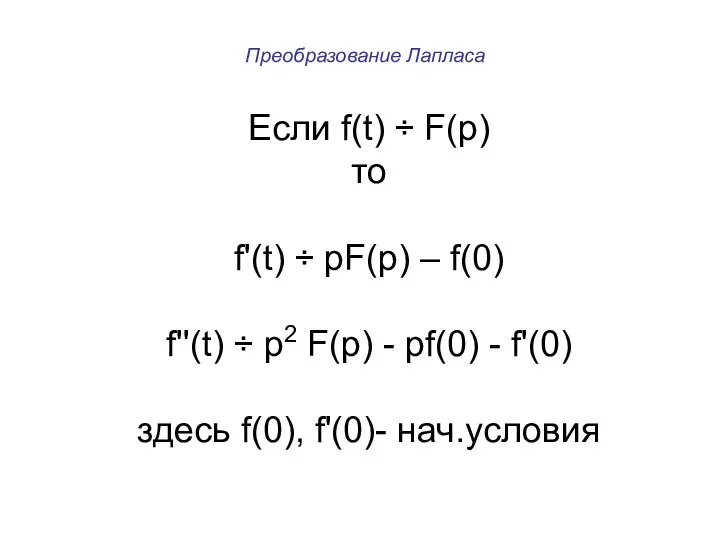
Преобразование Лапласа
Если f(t) ÷ F(p)
то
f'(t) ÷ pF(p) – f(0)
f''(t) ÷
Преобразование Лапласа
Если f(t) ÷ F(p)
то
f'(t) ÷ pF(p) – f(0)
f''(t) ÷
Найти изображения следующих оригиналов:
E(t)
sin(ωt)
cos(ωt)
Найти изображения следующих оригиналов:
E(t)
sin(ωt)
cos(ωt)
Решение линейных дифференциальных уравнений с помощью преобразования Лапласа
Решение линейных дифференциальных уравнений с помощью преобразования Лапласа
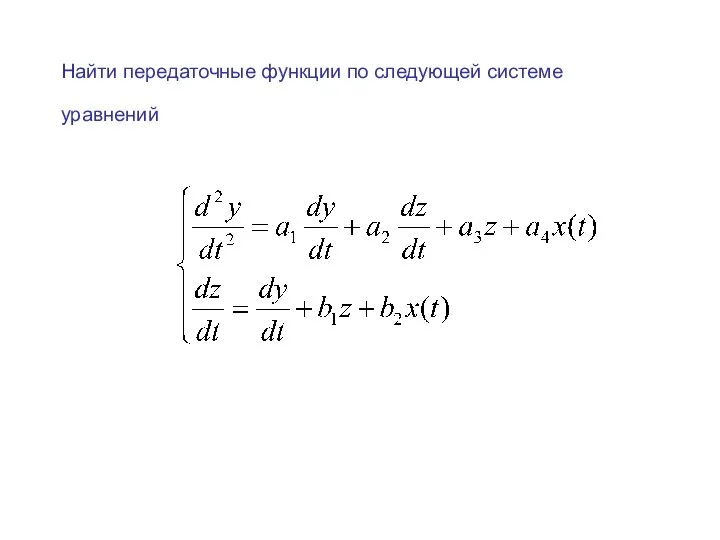
Найти передаточные функции по следующей системе уравнений
Найти передаточные функции по следующей системе уравнений
Определение процесса регулирования
g(t)=E(t)
Определение процесса регулирования
g(t)=E(t)
Определение процесса регулирования
X(p)=W(p)G(p)
Определение процесса регулирования
X(p)=W(p)G(p)
Определение процесса регулирования
Определение процесса регулирования
Определение процесса регулирования
Определение процесса регулирования
Определение процесса регулирования
Определение процесса регулирования
Преобразование Лапласа
Пример 5. Найти выходную величин y(t) системы,
описываемой уравнением
если
Преобразование Лапласа
Пример 5. Найти выходную величин y(t) системы,
описываемой уравнением
если
Численные методы решения
дифференциальных уравненрий
Численные методы решения
дифференциальных уравненрий
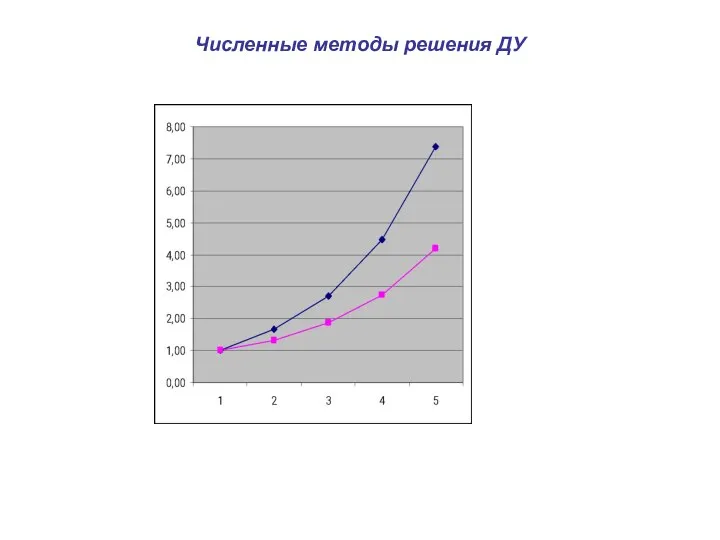
Численные методы решения ДУ
Численные методы решения ДУ
Численные методы решения ДУ
Численные методы решения ДУ
Численные методы решения ДУ
Численные методы решения ДУ
Численные методы решения ДУ
Численные методы решения ДУ
Численные методы решения ДУ
Численные методы решения ДУ
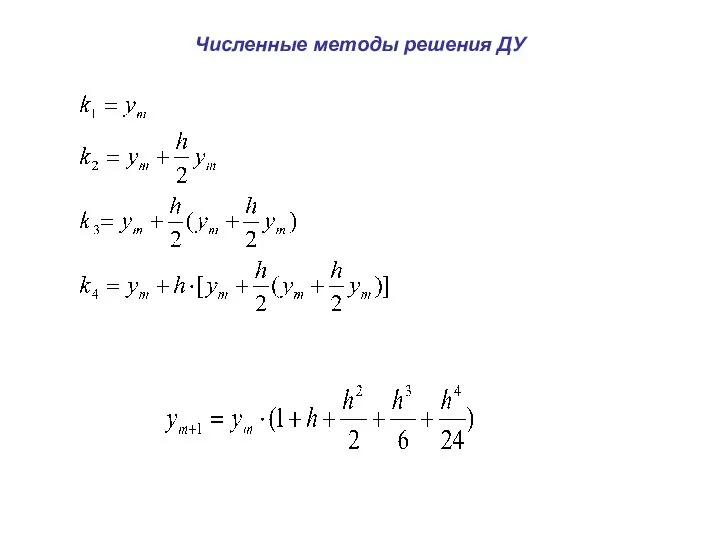
Численные методы решения ДУ
где
Численные методы решения ДУ
где
Численные методы решения ДУ
Численные методы решения ДУ
![Численные методы решения ДУ [0,2]; h=0.5](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/1463380/slide-22.jpg)
Численные методы решения ДУ
[0,2]; h=0.5
Численные методы решения ДУ
[0,2]; h=0.5
Численные методы решения ДУ
Численные методы решения ДУ
Численные методы решения ДУ
Численные методы решения ДУ
 Скачать презентацию Устный счет
Скачать презентацию Устный счет Презентация на тему ЗАДАНИЯ С РАЗВЕРНУТЫМ ОТВЕТОМ ПОВЫШЕННОГО УРОВНЯ СЛОЖНОСТИ С5. Подготовка к ЕГЭ.
Презентация на тему ЗАДАНИЯ С РАЗВЕРНУТЫМ ОТВЕТОМ ПОВЫШЕННОГО УРОВНЯ СЛОЖНОСТИ С5. Подготовка к ЕГЭ.  Корень уравнения
Корень уравнения Аттестационная работа. Образовательная программа внеурочной деятельности Решение олимпиадных задач по математике
Аттестационная работа. Образовательная программа внеурочной деятельности Решение олимпиадных задач по математике Калькуляционная карточка. Тесто заварное
Калькуляционная карточка. Тесто заварное Перпендикулярность прямой и плоскости
Перпендикулярность прямой и плоскости Методы минимизации функции многих переменных. Лекция 10
Методы минимизации функции многих переменных. Лекция 10 Теория множеств. Решение задач. Декартово произведение. (Лекция 6)
Теория множеств. Решение задач. Декартово произведение. (Лекция 6) ЕГЭ 2017. Задачи №3 и №6
ЕГЭ 2017. Задачи №3 и №6 Метод Гаусса решения систем линейных уравнений
Метод Гаусса решения систем линейных уравнений  Четырехугольники
Четырехугольники Изображение пространственных фигур на плоскости
Изображение пространственных фигур на плоскости Types of vectors
Types of vectors Логарифмы. Проект
Логарифмы. Проект Презентация по математике "География и геометрия моего города" - скачать
Презентация по математике "География и геометрия моего города" - скачать  Решение задач по планиметрии
Решение задач по планиметрии Математическая статистика. Предмет и задачи
Математическая статистика. Предмет и задачи Взаимное расположение прямых и плоскосте в пространстве
Взаимное расположение прямых и плоскосте в пространстве История числовых знаков. Чувашские числовые знаки
История числовых знаков. Чувашские числовые знаки Вычисление производных
Вычисление производных Признаки параллельности прямых. Задачи
Признаки параллельности прямых. Задачи Аттестационная работа. Исследование разных способов и подходов решения задач по теории вероятности
Аттестационная работа. Исследование разных способов и подходов решения задач по теории вероятности Таблица умножения - достойна уважения
Таблица умножения - достойна уважения  Показательные уравнения
Показательные уравнения Медианы, биссектрисы и высоты треугольника
Медианы, биссектрисы и высоты треугольника Что такое периметр?
Что такое периметр? Теорема Виета
Теорема Виета Цифра 3. Число три
Цифра 3. Число три