- Геометрические преобразования

Содержание
- 2. Геометрические преобразования − взаимно однозначные отображения прямой, плоскости или пространства на себя. Обычно рассматривают такие совокупности
- 3. Пропедевтика изучения темы: знакомство с симметрией в курсе математики 1-6 классов. Симметрия в искусстве. Понятие движения.
- 4. С реальными преобразованиями предметов мы имеем дело постоянно: изображая пространственные фигуры, мы преобразуем эти фигуры в
- 5. Сравнив эти два определения, видим их полную аналогию. Но в определении функции речь идет о сопоставлении
- 6. Точка Х называется неподвижной точкой преобразования f, если f(X)=X. Например, при проектировании фигуры М на прямую
- 7. Пусть Φ1 =f(Φ) и Φ2 = g(Φ1) . В итоге фигура Φ переводится в фигуру Φ2
- 8. Преобразования могут быть очень разнообразны: есть преобразования, которые изменяют форму фигуры. Есть преобразования, которые, хоть и
- 9. Движение в геометрии − преобразования пространства, сохраняющие свойства фигур (размеры, форму и др. ). Понятие движения
- 10. Движение называют собственным или несобственным в зависимости от того, сохраняет ли оно или меняет ориентацию, Всякое
- 11. Поворот плоскости вокруг центра O на угол α. Обозначение: или Свойство поворотов: (n - целое). Композиция
- 12. Центральная симметрия (относительно точки O) на плоскости. Определение и обозначение: Композиция центральных симметрий: (1) с общим
- 13. Осевая симметрия (симметрия относительно прямой l) на плоскости. Обозначение: Sl , l − ось симметрии Композиция
- 14. Параллельный перенос на вектор . Обозначение: Координатные формулы параллельного переноса на вектор , если А(0,0), В(а,
- 15. Выясним более подробно связь того движения, которое определяется в геометрии, с реальным движением тел. Представим себе
- 16. В геометрическом понятии движения удерживают только сопоставление одного положения тела с другим, вовсе отвлекаясь от процесса
- 17. Симметрия (от греческого -συμμετρία- означает соразмерность) - это пропорциональность или гармония в расположении одинаковых предметов какой-либо
- 18. Симметрия очень широко распространена в природе и в творениях человека. В творениях человека симметрия больше всего
- 19. Подобие с коэффициентом k. Обозначение: Определение: если k>0 и Х1 = F k(X) и Y1 =
- 20. Подобные фигуры Обозначение: (фигура Φ1 подобна фигуре Φ2 с коэффициентом k). Свойства подобных фигур: 1) рефлексивность:
- 21. Зеркальная симметрия. Зафиксируем некоторую плоскость α. Симметрией относительно плоскости α называется преобразование фигуры, которое каждой ее
- 22. Параллельное проектирование. Рассмотрим в пространстве некоторую прямую р, пересекающую плоскость α. Через каждую точку Х пространства
- 24. Скачать презентацию
Геометрические преобразования − взаимно однозначные отображения прямой, плоскости или пространства
Геометрические преобразования − взаимно однозначные отображения прямой, плоскости или пространства
Пропедевтика изучения темы: знакомство с симметрией в курсе математики 1-6
Пропедевтика изучения темы: знакомство с симметрией в курсе математики 1-6
С реальными преобразованиями предметов мы имеем дело постоянно: изображая пространственные
С реальными преобразованиями предметов мы имеем дело постоянно: изображая пространственные

Сравнив эти два определения, видим их полную аналогию. Но в
Сравнив эти два определения, видим их полную аналогию. Но в
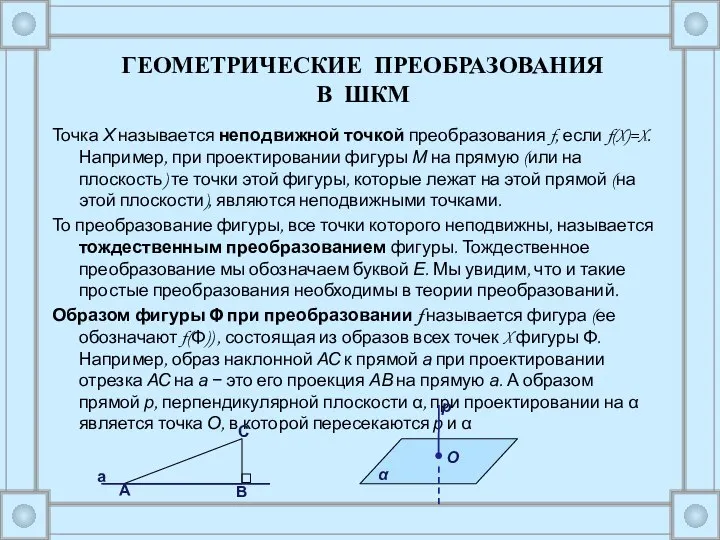
Точка Х называется неподвижной точкой преобразования f, если f(X)=X. Например,
Точка Х называется неподвижной точкой преобразования f, если f(X)=X. Например,
Пусть Φ1 =f(Φ) и Φ2 = g(Φ1) . В итоге
Пусть Φ1 =f(Φ) и Φ2 = g(Φ1) . В итоге
Преобразования могут быть очень разнообразны: есть преобразования, которые изменяют форму
Преобразования могут быть очень разнообразны: есть преобразования, которые изменяют форму
Движение в геометрии − преобразования пространства, сохраняющие свойства фигур (размеры,
Движение в геометрии − преобразования пространства, сохраняющие свойства фигур (размеры,
Движение называют собственным или несобственным в зависимости от того, сохраняет
Движение называют собственным или несобственным в зависимости от того, сохраняет
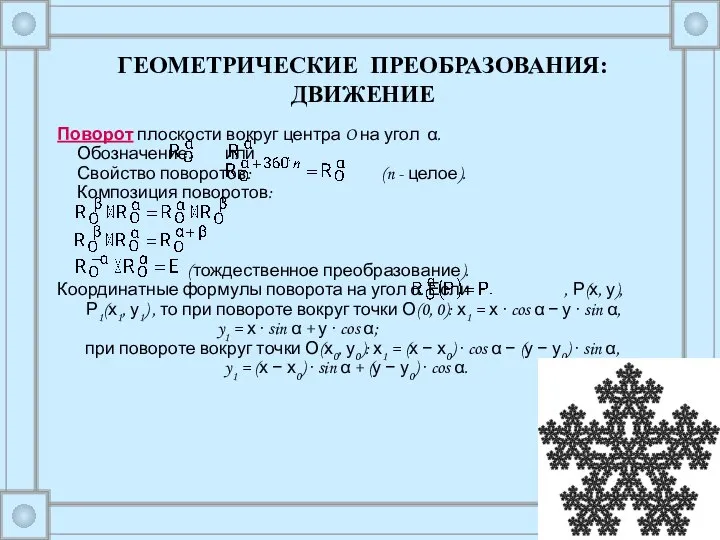
Поворот плоскости вокруг центра O на угол α.
Обозначение:
Поворот плоскости вокруг центра O на угол α.
Обозначение:
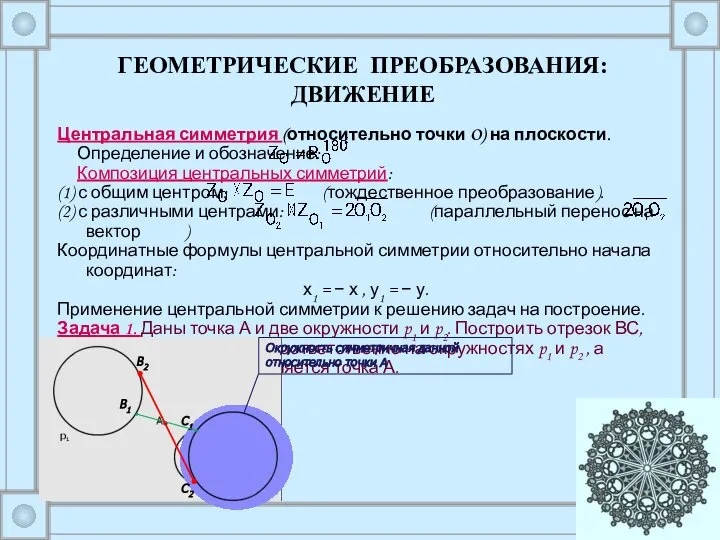
Центральная симметрия (относительно точки O) на плоскости.
Определение и
Центральная симметрия (относительно точки O) на плоскости.
Определение и
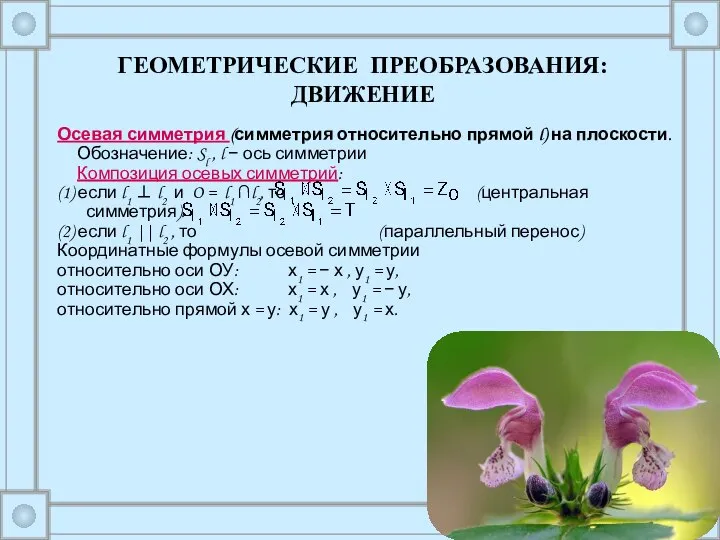
Осевая симметрия (симметрия относительно прямой l) на плоскости.
Обозначение:
Осевая симметрия (симметрия относительно прямой l) на плоскости.
Обозначение:

Параллельный перенос на вектор .
Обозначение:
Координатные формулы параллельного переноса
Параллельный перенос на вектор .
Обозначение:
Координатные формулы параллельного переноса
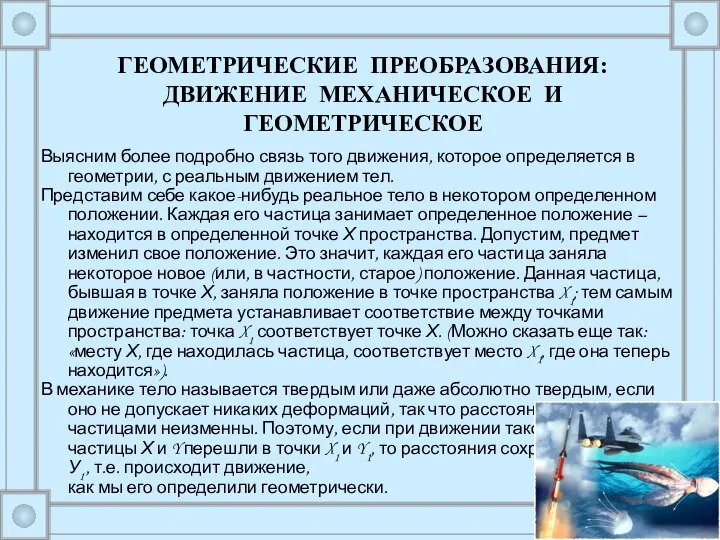
Выясним более подробно связь того движения, которое определяется в геометрии,
Выясним более подробно связь того движения, которое определяется в геометрии,
В геометрическом понятии движения удерживают только сопоставление одного положения тела
В геометрическом понятии движения удерживают только сопоставление одного положения тела
Симметрия (от греческого -συμμετρία- означает соразмерность) - это пропорциональность или
Симметрия (от греческого -συμμετρία- означает соразмерность) - это пропорциональность или

Симметрия очень широко распространена в природе и в творениях человека.
Симметрия очень широко распространена в природе и в творениях человека.
Подобие с коэффициентом k.
Обозначение:
Определение: если k>0
Подобие с коэффициентом k.
Обозначение:
Определение: если k>0

Подобные фигуры
Обозначение: (фигура Φ1 подобна фигуре Φ2 с
Подобные фигуры
Обозначение: (фигура Φ1 подобна фигуре Φ2 с
Зеркальная симметрия. Зафиксируем некоторую плоскость α.
Симметрией относительно плоскости α
Зеркальная симметрия. Зафиксируем некоторую плоскость α.
Симметрией относительно плоскости α
Параллельное проектирование. Рассмотрим в пространстве некоторую прямую р, пересекающую плоскость
Параллельное проектирование. Рассмотрим в пространстве некоторую прямую р, пересекающую плоскость
 Число и цифра 3
Число и цифра 3 Моделирование устойчивого развития экономических систем
Моделирование устойчивого развития экономических систем Определители 2,3,n порядка. Тема 1
Определители 2,3,n порядка. Тема 1 Четыре замечательные точки треугольника
Четыре замечательные точки треугольника Математическая модель
Математическая модель Как учились математике дети в прошлые времена Предметное исследование Гулк Екатерины Ученицы 5 аш класса Гимназии №41 Имени Э.
Как учились математике дети в прошлые времена Предметное исследование Гулк Екатерины Ученицы 5 аш класса Гимназии №41 Имени Э.  Случайная величина
Случайная величина Решение тригонометрических уравнений
Решение тригонометрических уравнений ЕГО ВЕЛИЧЕСТВО
ЕГО ВЕЛИЧЕСТВО  Точки и прямые
Точки и прямые Возрастание убывание функции Степенная функция Учитель математики Голубкова Елена Юрьевна ГБОУ школа №135 Выборгского района
Возрастание убывание функции Степенная функция Учитель математики Голубкова Елена Юрьевна ГБОУ школа №135 Выборгского района  Исполнители: Лазарев Данил, Обухов Ярослав, ученики 5 «А» класса. Руководители: Батрудинова Л.Г., учитель математики, Мищенк
Исполнители: Лазарев Данил, Обухов Ярослав, ученики 5 «А» класса. Руководители: Батрудинова Л.Г., учитель математики, Мищенк Логарифмическая линия в ЕГЭ - 2011
Логарифмическая линия в ЕГЭ - 2011  Аттестационная работа. Программа внеурочной деятельности учащихся 7 кл. научно-познавательного направления «Модульное оригами»
Аттестационная работа. Программа внеурочной деятельности учащихся 7 кл. научно-познавательного направления «Модульное оригами» Математика и другие науки Учитель математики ГБОУ СОШ №1413 г. Москвы Шумилова Юлия Евгеньевна
Математика и другие науки Учитель математики ГБОУ СОШ №1413 г. Москвы Шумилова Юлия Евгеньевна  Параллельные прямые в архитектуре
Параллельные прямые в архитектуре Производная функции
Производная функции Деление и бриод
Деление и бриод Многочлены. Обобщающий урок - путешествие
Многочлены. Обобщающий урок - путешествие Разложение многочленов на множители с помощью комбинаций различных приёмов
Разложение многочленов на множители с помощью комбинаций различных приёмов Шесть вопросов по планиметрии
Шесть вопросов по планиметрии Решение заданий по материалам ЕГЭ 2012 года. Математика (часть 3)
Решение заданий по материалам ЕГЭ 2012 года. Математика (часть 3) Понятие угла. Радианная мера угла
Понятие угла. Радианная мера угла Сложение обыкновенных дробей. Графический диктант 4. 5 класс
Сложение обыкновенных дробей. Графический диктант 4. 5 класс Параллельность прямых в пространстве
Параллельность прямых в пространстве Математические методы в историческом исследовании. (Лекция 1)
Математические методы в историческом исследовании. (Лекция 1) Перпендикулярность прямой и плоскости (10 класс)
Перпендикулярность прямой и плоскости (10 класс) Презентация на тему Решение задач на разностное и кратное сложение чисел
Презентация на тему Решение задач на разностное и кратное сложение чисел