- The Gilbert-Johnson-Keerthi (GJK) Algorithm

Содержание
- 2. Talk outline What is the GJK algorithm Terminology “Simplified” version of the algorithm One object is
- 3. GJK solves proximity queries Given two convex polyhedra Computes distance d Can also return closest pair
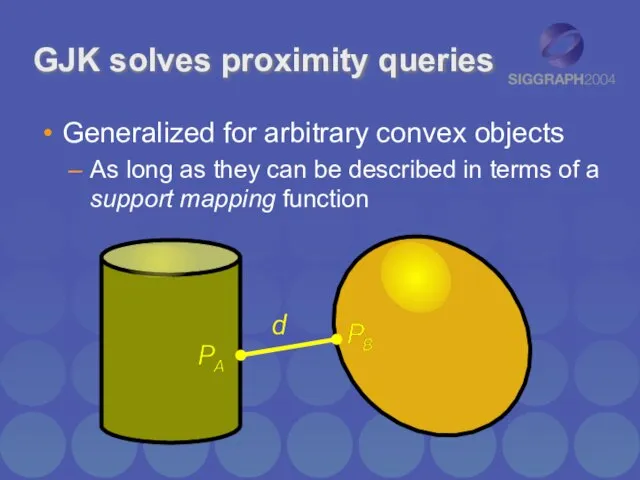
- 4. GJK solves proximity queries Generalized for arbitrary convex objects As long as they can be described
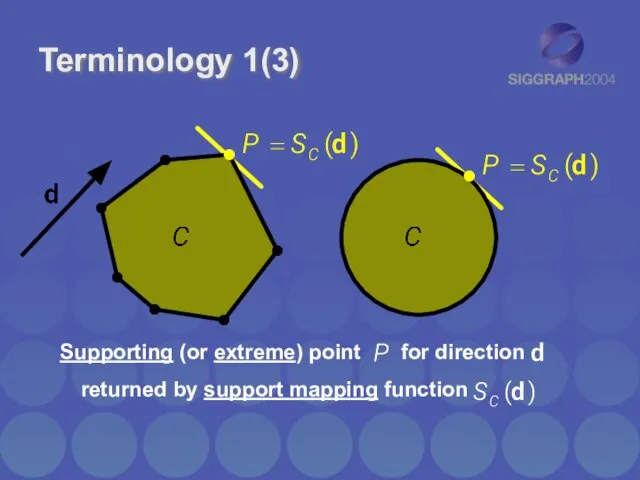
- 5. Terminology 1(3) Supporting (or extreme) point for direction returned by support mapping function
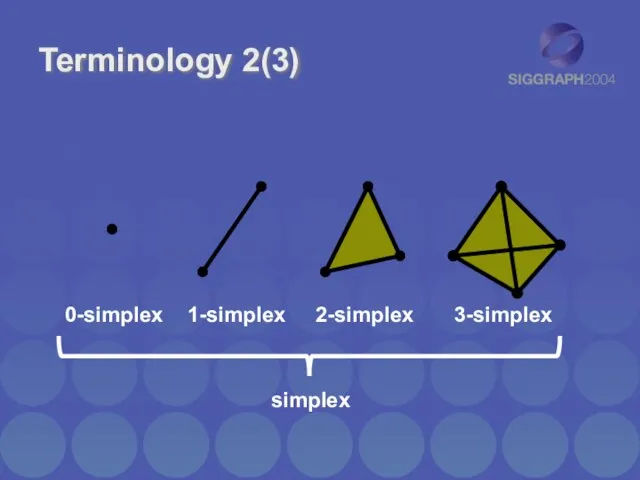
- 6. Terminology 2(3) 0-simplex 1-simplex 2-simplex 3-simplex simplex
- 7. Terminology 3(3) Point set C Convex hull, CH(C)
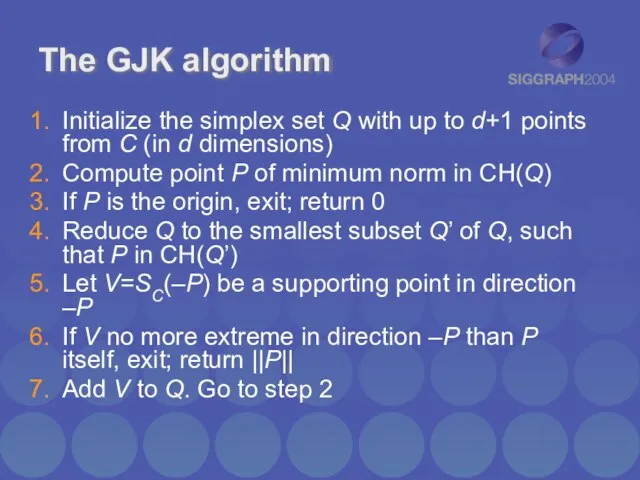
- 8. The GJK algorithm Initialize the simplex set Q with up to d+1 points from C (in
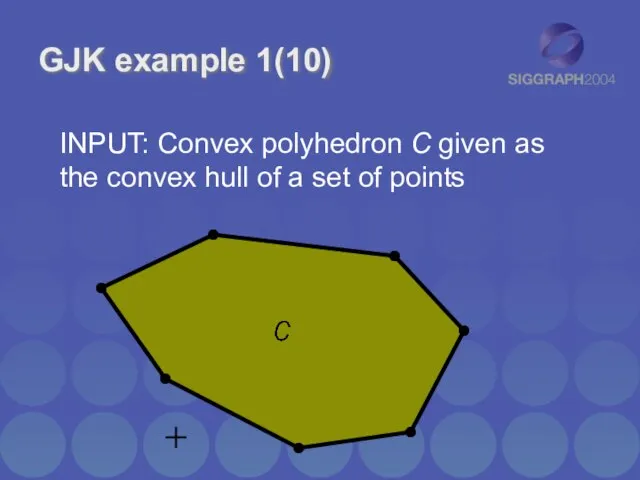
- 9. GJK example 1(10) INPUT: Convex polyhedron C given as the convex hull of a set of
- 10. Initialize the simplex set Q with up to d+1 points from C (in d dimensions) GJK
- 11. GJK example 3(10) Compute point P of minimum norm in CH(Q)
- 12. GJK example 4(10) If P is the origin, exit; return 0 Reduce Q to the smallest
- 13. GJK example 5(10) Let V=SC(–P) be a supporting point in direction –P
- 14. GJK example 6(10) If V no more extreme in direction –P than P itself, exit; return
- 15. GJK example 7(10) Compute point P of minimum norm in CH(Q)
- 16. GJK example 8(10) If P is the origin, exit; return 0 Reduce Q to the smallest
- 17. GJK example 9(10) Let V=SC(–P) be a supporting point in direction –P
- 18. GJK example 10(10) DONE! If V no more extreme in direction –P than P itself, exit;
- 19. Distance subalgorithm 1(2) Approach #1: Solve algebraically Used in original GJK paper Johnson’s distance subalgorithm Searches
- 20. Distance subalgorithm 2(2) Approach #2: Solve geometrically Mathematically equivalent But more intuitive Therefore easier to make
- 21. Closest point on triangle ClosestPointOnTriangleToPoint() Finds point on triangle closest to a given point
- 22. Closest point on triangle Separate cases based on which feature Voronoi region point lies in
- 23. Closest point on triangle
- 24. Closest point on triangle
- 25. GJK for two objects What about two polyhedra, A and B? Reduce problem into the one
- 26. Minkowski sum & difference Minkowski sum The sweeping of one convex object with another Defined as:
- 27. Minkowski sum & difference Minkowski difference, defined as: Can write distance between two objects as: A
- 28. The generalization A and B intersecting iff A–B contains the origin! Distance between A and B
- 29. GJK for moving objects
- 30. Transform the problem…
- 31. …into moving vs stationary
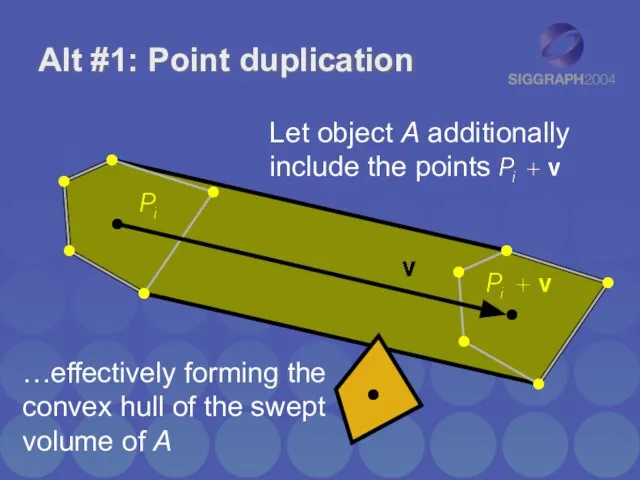
- 32. Alt #1: Point duplication Let object A additionally include the points …effectively forming the convex hull
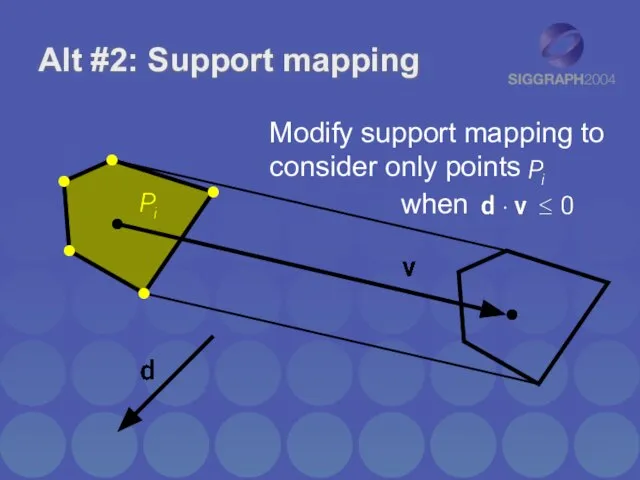
- 33. Alt #2: Support mapping Modify support mapping to consider only points when
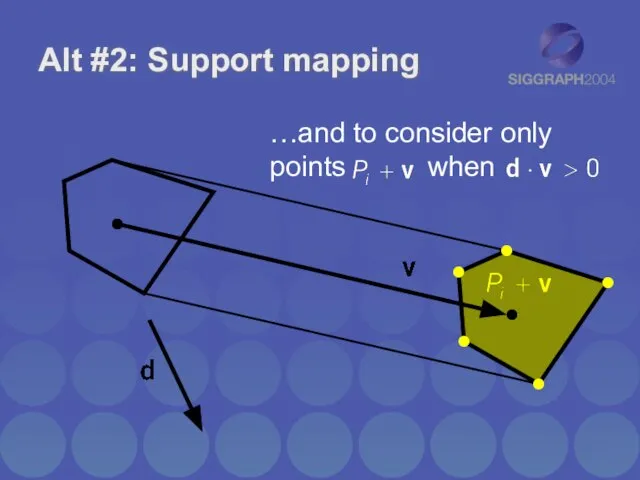
- 34. Alt #2: Support mapping …and to consider only points when
- 35. GJK for moving objects Presented solution Gives only Boolean interference detection result Interval halving over v
- 37. Скачать презентацию
Talk outline
What is the GJK algorithm
Terminology
“Simplified” version of the algorithm
One object
Talk outline
What is the GJK algorithm
Terminology
“Simplified” version of the algorithm
One object

GJK solves proximity queries
Given two convex polyhedra
Computes distance d
Can also return
GJK solves proximity queries
Given two convex polyhedra
Computes distance d
Can also return
GJK solves proximity queries
Generalized for arbitrary convex objects
As long as they
GJK solves proximity queries
Generalized for arbitrary convex objects
As long as they
Terminology 1(3)
Supporting (or extreme) point
for direction
returned by support mapping function
Terminology 1(3)
Supporting (or extreme) point
for direction
returned by support mapping function
Terminology 2(3)
0-simplex
1-simplex
2-simplex
3-simplex
simplex
Terminology 2(3)
0-simplex
1-simplex
2-simplex
3-simplex
simplex
Terminology 3(3)
Point set C
Convex hull, CH(C)
Terminology 3(3)
Point set C
Convex hull, CH(C)
The GJK algorithm
Initialize the simplex set Q with up to d+1
The GJK algorithm
Initialize the simplex set Q with up to d+1
GJK example 1(10)
INPUT: Convex polyhedron C given as the convex hull
GJK example 1(10)
INPUT: Convex polyhedron C given as the convex hull
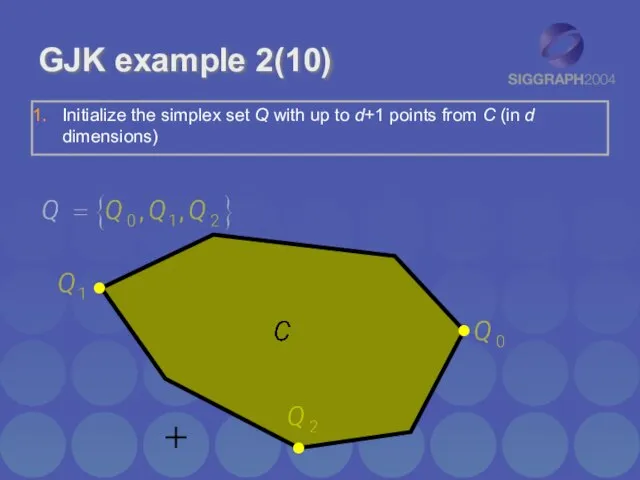
Initialize the simplex set Q with up to d+1 points from
Initialize the simplex set Q with up to d+1 points from
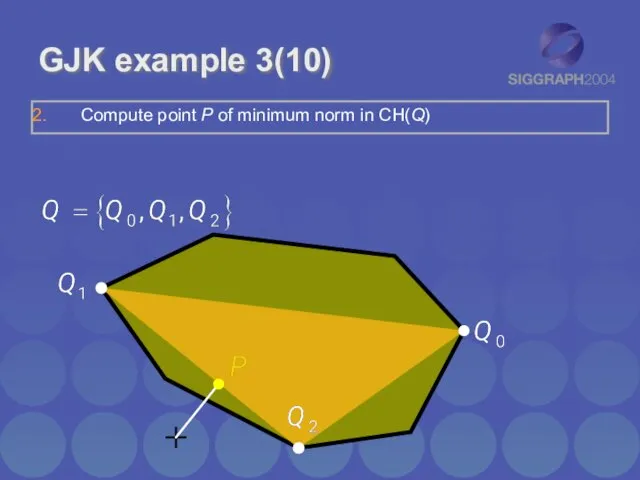
GJK example 3(10)
Compute point P of minimum norm in CH(Q)
GJK example 3(10)
Compute point P of minimum norm in CH(Q)
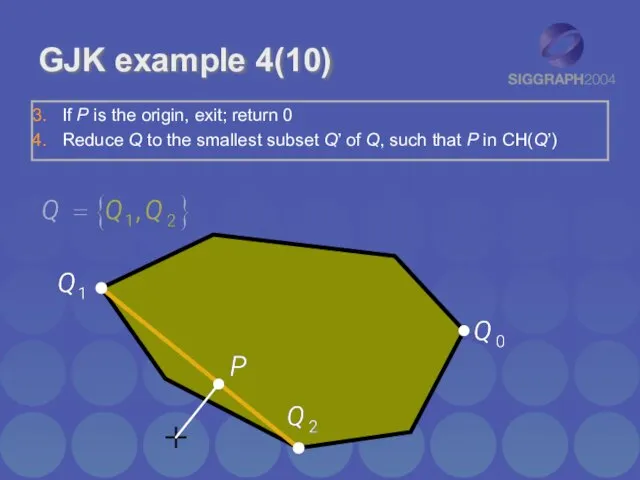
GJK example 4(10)
If P is the origin, exit; return 0
Reduce Q
GJK example 4(10)
If P is the origin, exit; return 0
Reduce Q

GJK example 5(10)
Let V=SC(–P) be a supporting point in direction –P
GJK example 5(10)
Let V=SC(–P) be a supporting point in direction –P

GJK example 6(10)
If V no more extreme in direction –P than
GJK example 6(10)
If V no more extreme in direction –P than
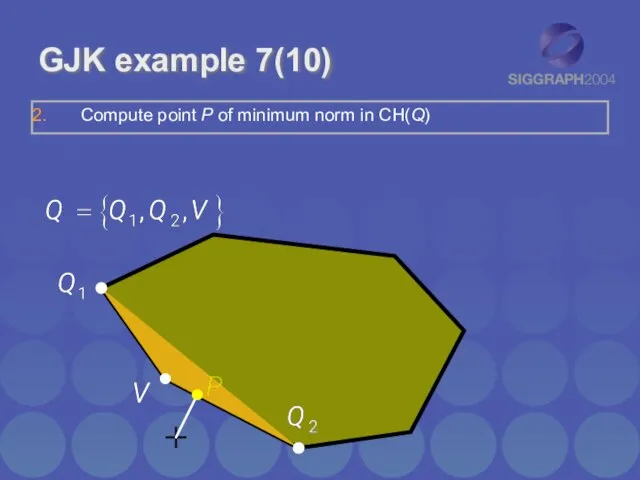
GJK example 7(10)
Compute point P of minimum norm in CH(Q)
GJK example 7(10)
Compute point P of minimum norm in CH(Q)
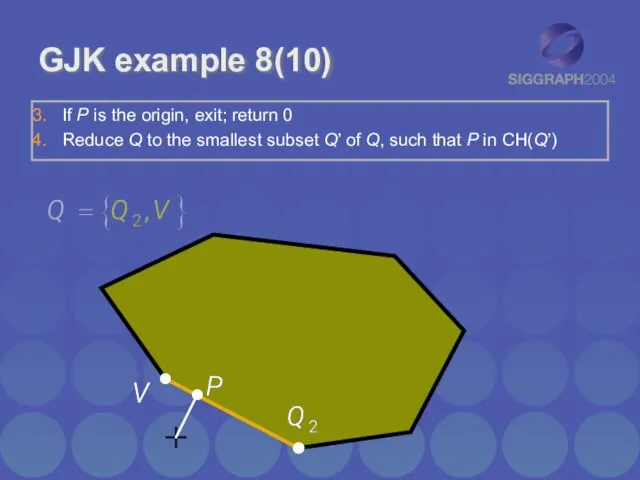
GJK example 8(10)
If P is the origin, exit; return 0
Reduce Q
GJK example 8(10)
If P is the origin, exit; return 0
Reduce Q

GJK example 9(10)
Let V=SC(–P) be a supporting point in direction –P
GJK example 9(10)
Let V=SC(–P) be a supporting point in direction –P
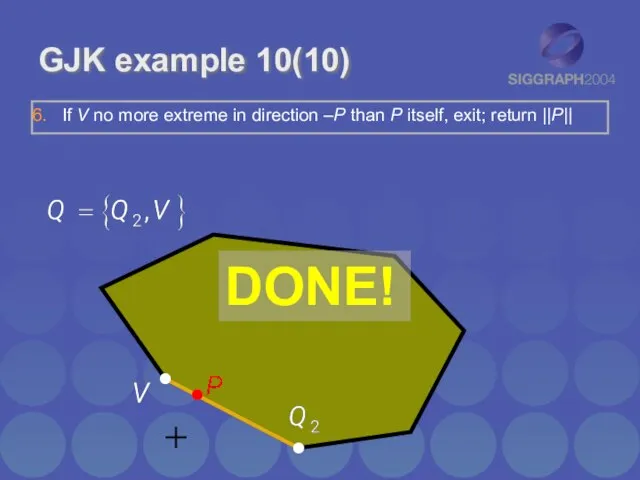
GJK example 10(10)
DONE!
If V no more extreme in direction –P than
GJK example 10(10)
DONE!
If V no more extreme in direction –P than
Distance subalgorithm 1(2)
Approach #1: Solve algebraically
Used in original GJK paper
Johnson’s distance
Distance subalgorithm 1(2)
Approach #1: Solve algebraically
Used in original GJK paper
Johnson’s distance
Distance subalgorithm 2(2)
Approach #2: Solve geometrically
Mathematically equivalent
But more intuitive
Therefore easier to
Distance subalgorithm 2(2)
Approach #2: Solve geometrically
Mathematically equivalent
But more intuitive
Therefore easier to
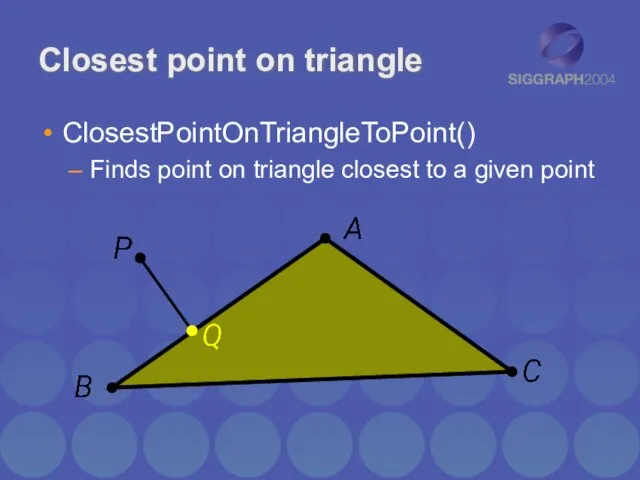
Closest point on triangle
ClosestPointOnTriangleToPoint()
Finds point on triangle closest to a given
Closest point on triangle
ClosestPointOnTriangleToPoint()
Finds point on triangle closest to a given
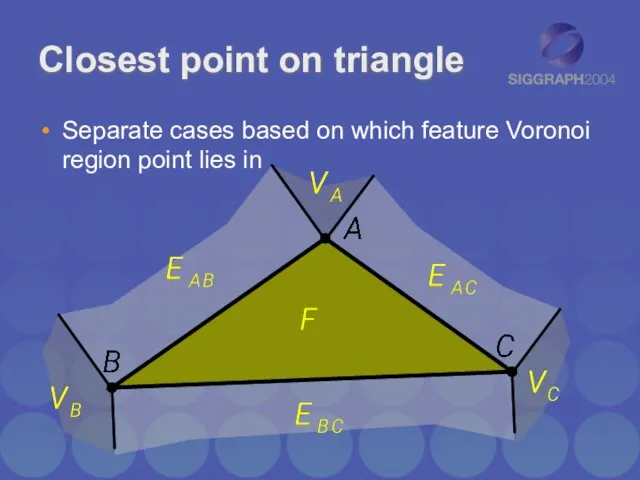
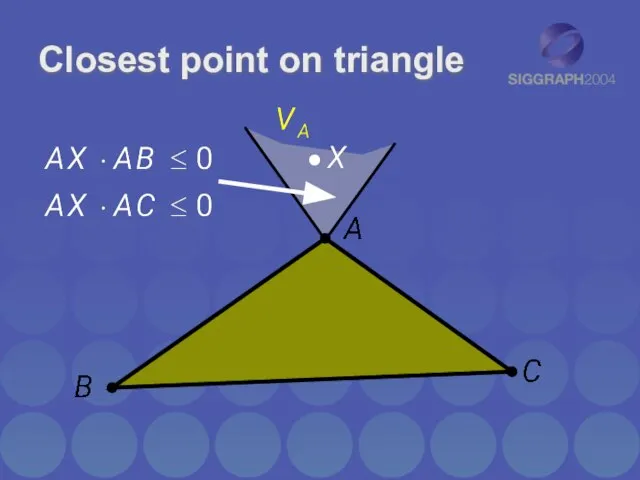
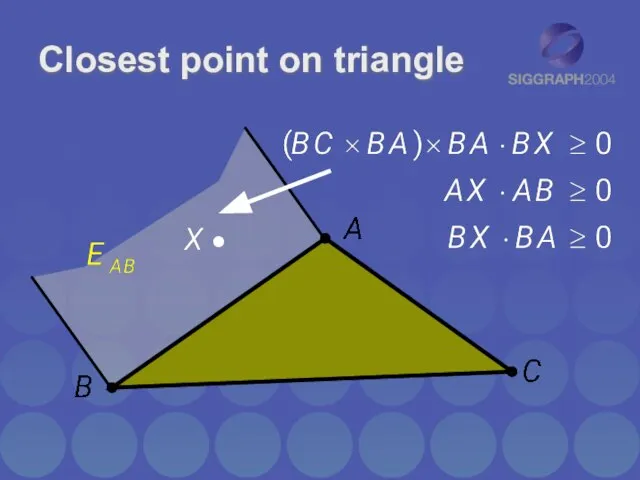
Closest point on triangle
Separate cases based on which feature Voronoi region
Closest point on triangle
Separate cases based on which feature Voronoi region
Closest point on triangle
Closest point on triangle
Closest point on triangle
Closest point on triangle
GJK for two objects
What about two polyhedra, A and B?
Reduce problem
GJK for two objects
What about two polyhedra, A and B?
Reduce problem
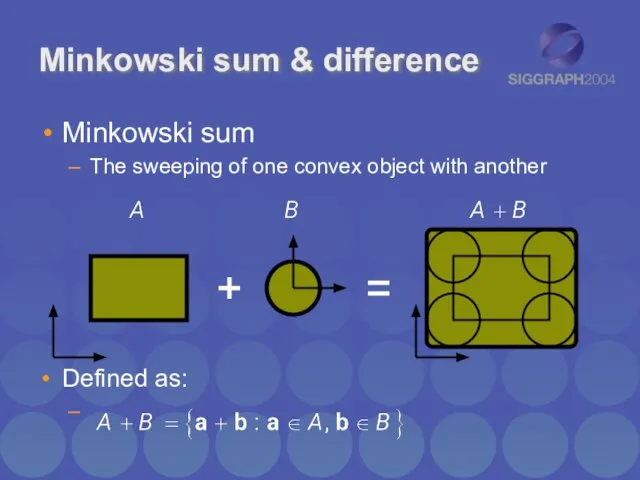
Minkowski sum & difference
Minkowski sum
The sweeping of one convex object with
Minkowski sum & difference
Minkowski sum
The sweeping of one convex object with
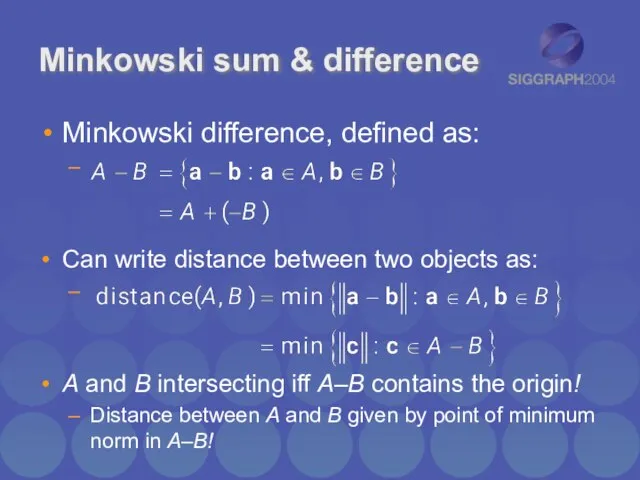
Minkowski sum & difference
Minkowski difference, defined as:
Can write distance between two
Minkowski sum & difference
Minkowski difference, defined as:
Can write distance between two
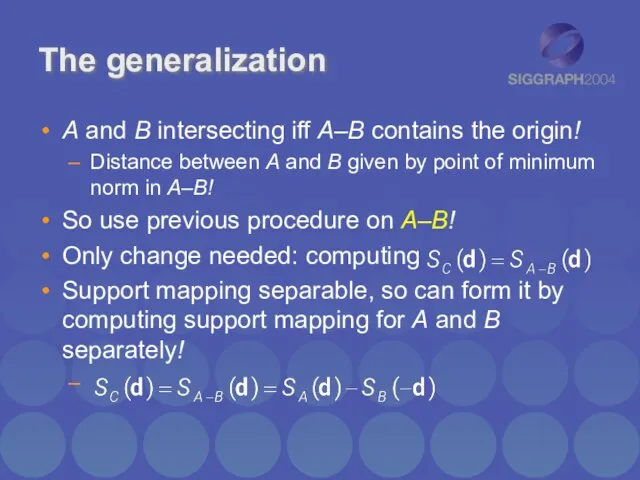
The generalization
A and B intersecting iff A–B contains the origin!
Distance between
The generalization
A and B intersecting iff A–B contains the origin!
Distance between
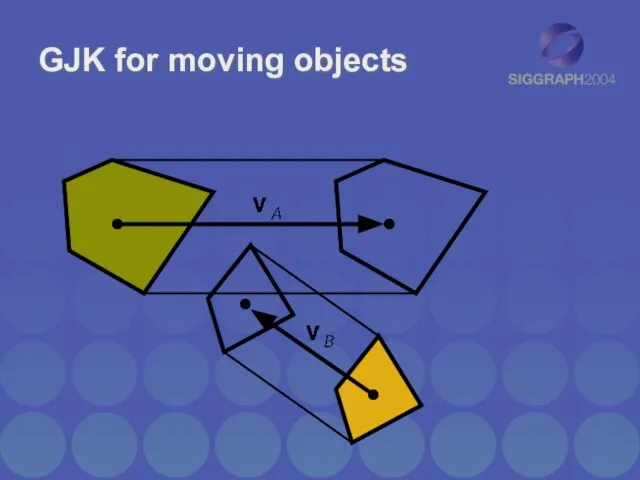
GJK for moving objects
GJK for moving objects
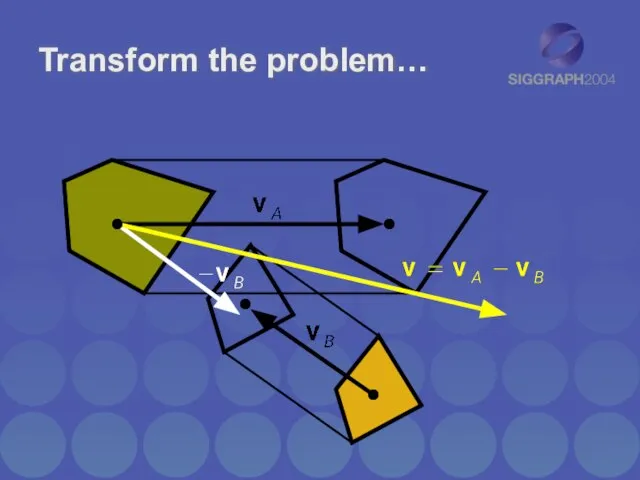
Transform the problem…
Transform the problem…
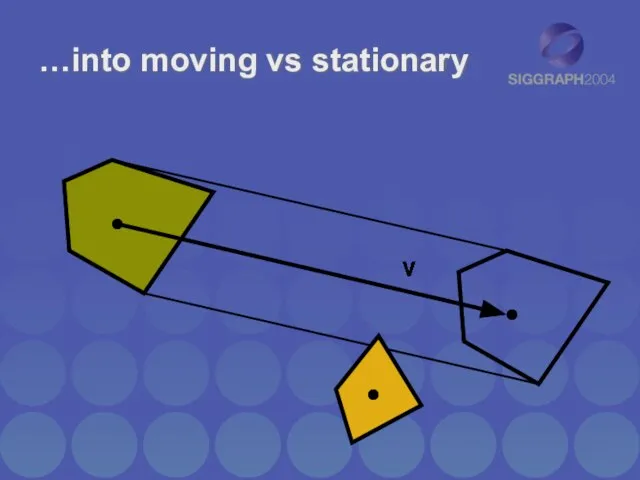
…into moving vs stationary
…into moving vs stationary
Alt #1: Point duplication
Let object A additionally include the points
…effectively forming
Alt #1: Point duplication
Let object A additionally include the points
…effectively forming
Alt #2: Support mapping
Modify support mapping to consider only points
when
Alt #2: Support mapping
Modify support mapping to consider only points
when
Alt #2: Support mapping
…and to consider only points
when
Alt #2: Support mapping
…and to consider only points
when

GJK for moving objects
Presented solution
Gives only Boolean interference detection result
Interval halving
GJK for moving objects
Presented solution
Gives only Boolean interference detection result
Interval halving
 Математическое описание ЭЭС при исследовании электромеханических переходных процессов
Математическое описание ЭЭС при исследовании электромеханических переходных процессов Функция y=sin x, её свойства и график
Функция y=sin x, её свойства и график Презентация на тему Выполните задание дроби
Презентация на тему Выполните задание дроби Презентация по математике "Математические ребусы" - скачать бесплатно
Презентация по математике "Математические ребусы" - скачать бесплатно Пирамида. Усеченная пирамида
Пирамида. Усеченная пирамида Анаграмма. Великолепная семерка
Анаграмма. Великолепная семерка Сложение и вычитание векторов
Сложение и вычитание векторов Свойства сложения и умножения. 5 класс
Свойства сложения и умножения. 5 класс ГИА 2014. Модуль Геометрия №10
ГИА 2014. Модуль Геометрия №10 Муниципальное бюджетное общеобразовательное учреждение «Дрезненская гимназия» ШУТКА ГЕНИЕВ: ФЛЕКСАГОН Выполнила: Маркина Диа
Муниципальное бюджетное общеобразовательное учреждение «Дрезненская гимназия» ШУТКА ГЕНИЕВ: ФЛЕКСАГОН Выполнила: Маркина Диа Decision trees. Деревья решений
Decision trees. Деревья решений Формула Ньютона-Лейбница
Формула Ньютона-Лейбница 7 класста алгебра курсы буенча кабатлау дәресе
7 класста алгебра курсы буенча кабатлау дәресе Подготовка к ЕГЭ (профильный уровень). Задания 5
Подготовка к ЕГЭ (профильный уровень). Задания 5 Четырехугольники
Четырехугольники Планиметрия. Задачи на доказательство
Планиметрия. Задачи на доказательство Показательная и логарифмическая функции
Показательная и логарифмическая функции Смешанные числа 5. класс
Смешанные числа 5. класс Векторы и координаты. Решение задач. Основные понятия комбинаторики
Векторы и координаты. Решение задач. Основные понятия комбинаторики Призма
Призма Дискретная математика. Основные понятия теории множеств. (Лекция 1.1)
Дискретная математика. Основные понятия теории множеств. (Лекция 1.1) Математикалық ұғымдарды
Математикалық ұғымдарды Числовые и буквенные выражения. Математика 5 класс
Числовые и буквенные выражения. Математика 5 класс Возведение степени в степень
Возведение степени в степень Задания по математике (5 класс, часть 1)
Задания по математике (5 класс, часть 1) Задачи на проценты. ЕГЭ
Задачи на проценты. ЕГЭ Обработка данных. Задачи локального и глобального интерполирования
Обработка данных. Задачи локального и глобального интерполирования Физические величины
Физические величины