- Диагностирование динамических систем авиационного оборудования по критерию

Содержание
Структура алгоритма (6.4)-(6.9) позволяет организовать поканальный контроль динамической системы. При
Структура алгоритма (6.4)-(6.9) позволяет организовать поканальный контроль динамической системы. При
С учетом допуска поканальный контроль динамических систем АО по критерию
С учетом допуска поканальный контроль динамических систем АО по критерию
 Автоматическое управление торможением на участке Саратов I – Трофимовский I
Автоматическое управление торможением на участке Саратов I – Трофимовский I Экономические основы производства. Накладные расходы
Экономические основы производства. Накладные расходы Электрооборудование токарных сtahкob
Электрооборудование токарных сtahкob Интерактивная познавательная игра Рождественский калейдоскоп
Интерактивная познавательная игра Рождественский калейдоскоп Царство животные
Царство животные алгебраических выражений
алгебраических выражений 20140616_impressionizm
20140616_impressionizm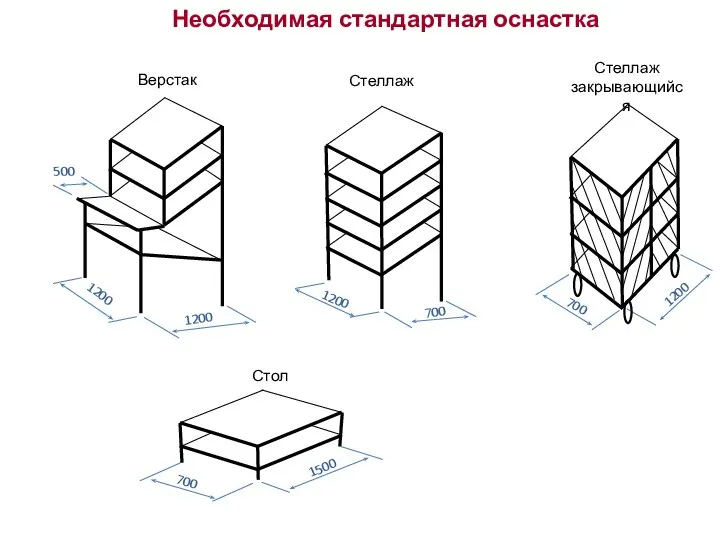 Необходимая стандартная оснастка
Необходимая стандартная оснастка either-or-neither-nor-not-only-but-also-both-and-grammar-guides
either-or-neither-nor-not-only-but-also-both-and-grammar-guides Понятие о технологии деревянного строительства
Понятие о технологии деревянного строительства объявление
объявление Дебитометрические исследования скважин. (Лекция 3)
Дебитометрические исследования скважин. (Лекция 3) День святых жён - мироносиц
День святых жён - мироносиц Производство стали
Производство стали Оснащение для малярных работ
Оснащение для малярных работ Классификация, устройство и характерные неисправности поршневых компрессоров
Классификация, устройство и характерные неисправности поршневых компрессоров Ночная сорочка. Проект по технологии. (7 класс)
Ночная сорочка. Проект по технологии. (7 класс) Общие понятия о зданиях и сооружениях требования, предъявляемые к зданиям (тема 4.1)
Общие понятия о зданиях и сооружениях требования, предъявляемые к зданиям (тема 4.1) В некотором царстве
В некотором царстве Таинство Венчания
Таинство Венчания Конкурс Семейные реликвии в моей семье
Конкурс Семейные реликвии в моей семье ImmiAccount enhancements
ImmiAccount enhancements Энергосберегающие мероприятия. Подтема 4. Классификация мероприятий по энергоэффективности
Энергосберегающие мероприятия. Подтема 4. Классификация мероприятий по энергоэффективности 20111108_zagadki_o_lete_chast_2
20111108_zagadki_o_lete_chast_2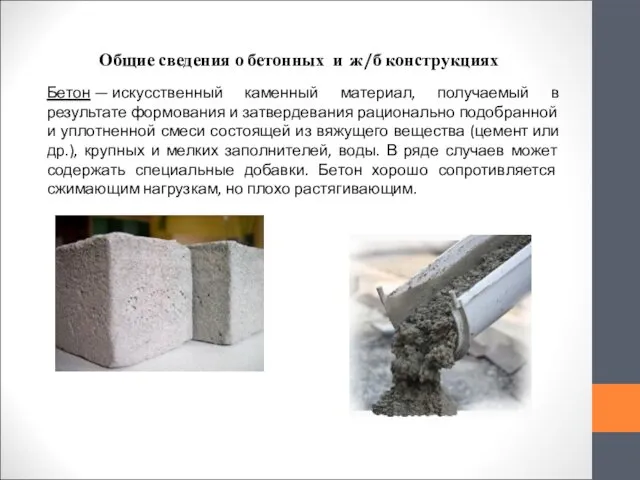 Общие сведения о бетонных и железобетонных конструкциях
Общие сведения о бетонных и железобетонных конструкциях Весело карандаш учитель лисица
Весело карандаш учитель лисица Псих срс Аутизм
Псих срс Аутизм Почетные граждане и знаменитые люди п. Уразова
Почетные граждане и знаменитые люди п. Уразова