- Электрические машины автоматических устройств

Содержание
- 2. Классификация электрических микромашин Условно электрическими микромашинами называют машины мощностью до 600 Вт. По назначению 1. ЭММ
- 5. Функциональные устройства – машины, которые преобразуют электрическую или механическую величину в определённую функциональную зависимость (sin, cos
- 6. Продольный разрез АД с полым немагнитным ротором 1 - Полый алюминиевый стакан – ротор с валом
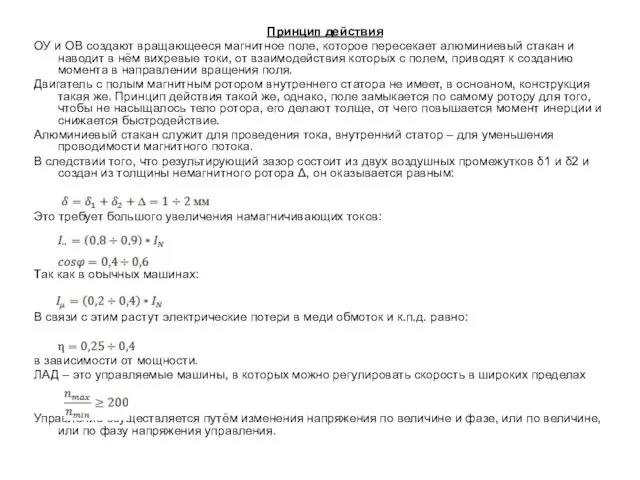
- 7. Принцип действия ОУ и ОВ создают вращающееся магнитное поле, которое пересекает алюминиевый стакан и наводит в
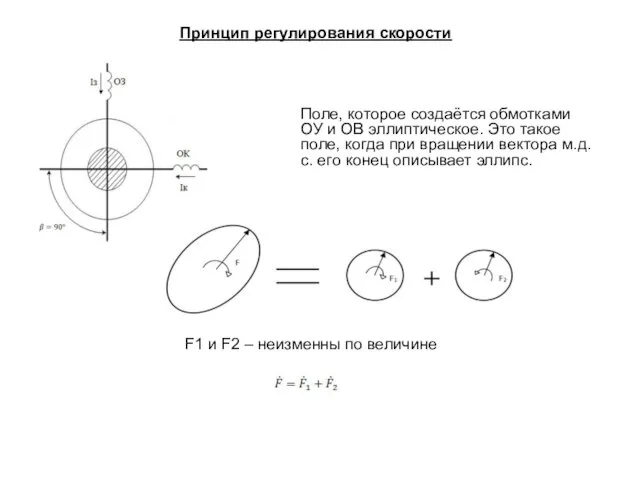
- 8. Принцип регулирования скорости Поле, которое создаётся обмотками ОУ и ОВ эллиптическое. Это такое поле, когда при
- 9. Направление вращения результирующего поля зависит от соотношения прямого и обратного поля. Оба вращающихся поля, рассматриваемых отдельно,
- 11. Скачать презентацию
Классификация электрических микромашин
Условно электрическими микромашинами называют машины мощностью до 600 Вт.
По
Классификация электрических микромашин
Условно электрическими микромашинами называют машины мощностью до 600 Вт.
По

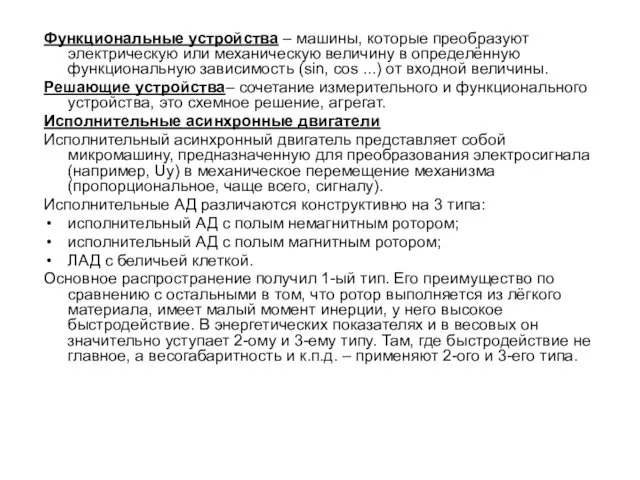
Функциональные устройства – машины, которые преобразуют электрическую или механическую величину в
Функциональные устройства – машины, которые преобразуют электрическую или механическую величину в
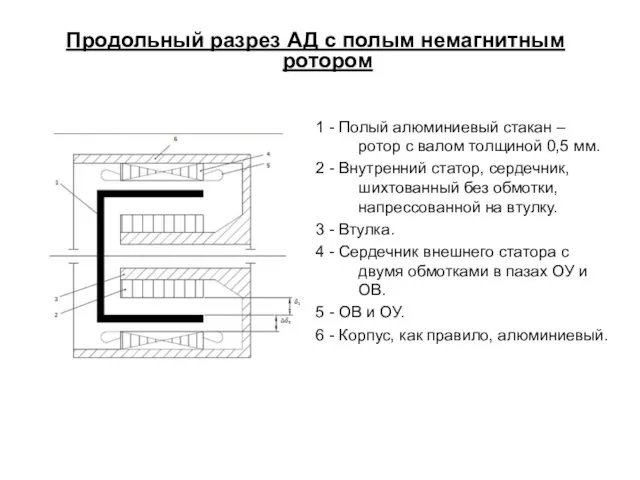
Продольный разрез АД с полым немагнитным ротором
1 - Полый алюминиевый стакан
Продольный разрез АД с полым немагнитным ротором
1 - Полый алюминиевый стакан
Принцип действия
ОУ и ОВ создают вращающееся магнитное поле, которое пересекает алюминиевый
Принцип действия
ОУ и ОВ создают вращающееся магнитное поле, которое пересекает алюминиевый
Принцип регулирования скорости
Поле, которое создаётся обмотками ОУ и ОВ эллиптическое. Это
Принцип регулирования скорости
Поле, которое создаётся обмотками ОУ и ОВ эллиптическое. Это
Направление вращения результирующего поля зависит от соотношения прямого и обратного поля.
Направление вращения результирующего поля зависит от соотношения прямого и обратного поля.
 20141021_prezentatsiyav_mire_prirody
20141021_prezentatsiyav_mire_prirody Команда Знатоки родного края
Команда Знатоки родного края КНИГИ ДЕКАБРЬ
КНИГИ ДЕКАБРЬ Лэпбук на тему: Говорим по татарскиТатарча сөйләшәбез
Лэпбук на тему: Говорим по татарскиТатарча сөйләшәбез Совершенствование транспортной системы города Москва
Совершенствование транспортной системы города Москва Бытовые электроприборы
Бытовые электроприборы Сдержанность в речи
Сдержанность в речи Охрана труда оператора автозаправочной станции
Охрана труда оператора автозаправочной станции Медиакорпорация News Corporation (США): история и настоящее
Медиакорпорация News Corporation (США): история и настоящее Оценка влияния различных механик акций на продажи на маркетплейсе
Оценка влияния различных механик акций на продажи на маркетплейсе 20120424_recenziya
20120424_recenziya Дослідження процесу очищення яблучного соку в енергозбережних технологіях
Дослідження процесу очищення яблучного соку в енергозбережних технологіях Ne_otnimayte_solntse_u_detey
Ne_otnimayte_solntse_u_detey Новые формы культурно-досуговой деятельности в условиях самоизоляции и карантина
Новые формы культурно-досуговой деятельности в условиях самоизоляции и карантина Пути повышения коррозионной стойкости трубопровода в районе Крайнего Севера
Пути повышения коррозионной стойкости трубопровода в районе Крайнего Севера Конструирование воротников
Конструирование воротников Строительные материалы. Керамические материалы и изделия
Строительные материалы. Керамические материалы и изделия Stunde 1
Stunde 1 Мало- много, один – много, столько же
Мало- много, один – много, столько же Каменный уголь
Каменный уголь Фантазии из муки, соли и воды!
Фантазии из муки, соли и воды! blok._primenenie_prostykh_mekhanizmov
blok._primenenie_prostykh_mekhanizmov Крым - наш край родной
Крым - наш край родной МИД И NB11 (1)
МИД И NB11 (1) Сдк п. Тоновка приглашает всех на веселое новогоднее шоу И снова здравствуйте
Сдк п. Тоновка приглашает всех на веселое новогоднее шоу И снова здравствуйте Материалы для дистанционной поддержки учащихся по дополнительной программе
Материалы для дистанционной поддержки учащихся по дополнительной программе Проект Эльба
Проект Эльба Большой театр
Большой театр