- Электропривод и автоматизация оборудования лесного комплекса

Содержание
- 2. ЗАДАНИЕ № 1 Исходные данные задания: - тип производственной установки – поточно-транспортная система (ПТС); - подвид
- 3. Пример расчёта параметров и построение механической характеристики двигателя 5А200L4 МКР = mКР × MH = 2,8
- 4. 1.2 Построение механической характеристики выбранного ЭП (электродвигателя) Механическая характеристика двигателя – это зависимость частоты вращения ротора
- 5. Расчёт параметров и построение механической характеристики двигателя n n2 MН n1 MКР M, Н×м MП sКР
- 6. 1.3 Разработать электрическую принципиальную релейную схему управления (ЭПРСУ) трёхфазным реверсивным асинхронным электроприводом с короткозамкнутым ротором (АД
- 7. Точки подачи груза Точка доставки груза Точка доставки груза ПУ № 1 СТРУКТУРНО-КОНСТРУКТИВНАЯ СХЕМА ПРОИЗВОДСТВЕННОЙ УСТАНОВКИ
- 9. Скачать презентацию
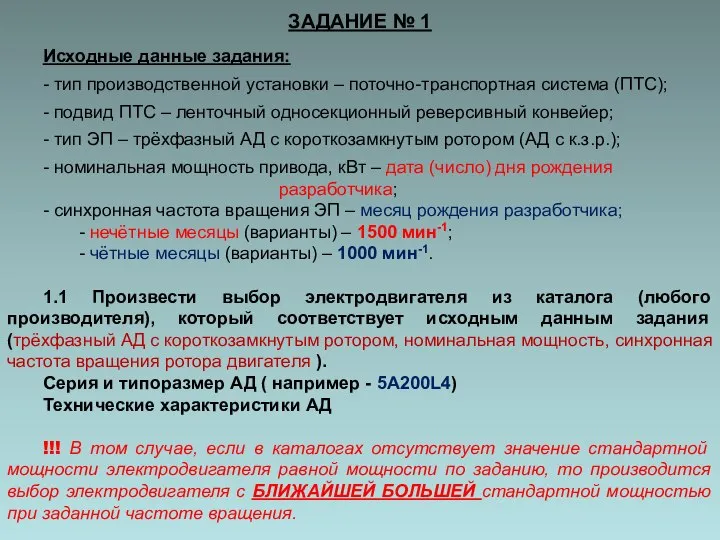
ЗАДАНИЕ № 1
Исходные данные задания:
- тип производственной установки – поточно-транспортная система
ЗАДАНИЕ № 1
Исходные данные задания:
- тип производственной установки – поточно-транспортная система
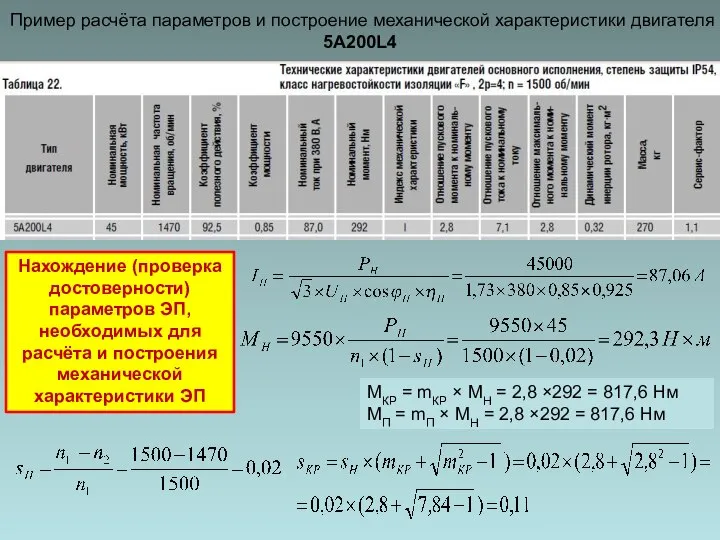
Пример расчёта параметров и построение механической характеристики двигателя 5А200L4
МКР = mКР
Пример расчёта параметров и построение механической характеристики двигателя 5А200L4
МКР = mКР
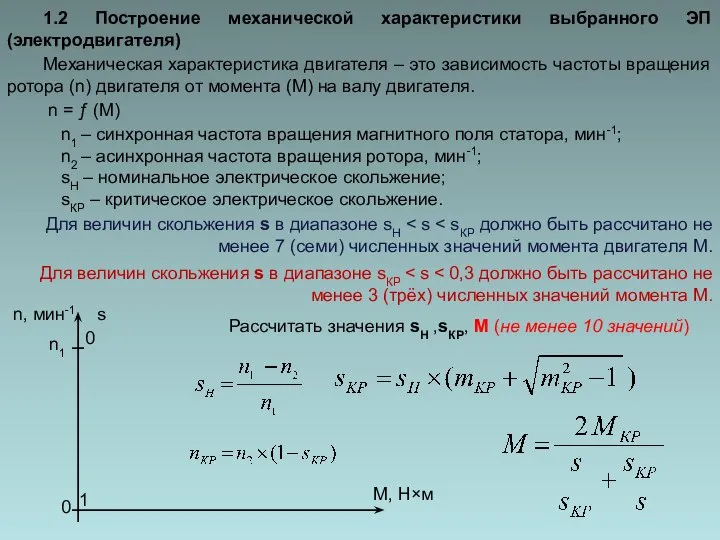
1.2 Построение механической характеристики выбранного ЭП (электродвигателя)
Механическая характеристика двигателя – это
1.2 Построение механической характеристики выбранного ЭП (электродвигателя)
Механическая характеристика двигателя – это
Расчёт параметров и построение механической характеристики двигателя
n
n2
MН
n1
MКР
M, Н×м
MП
sКР
sH
s
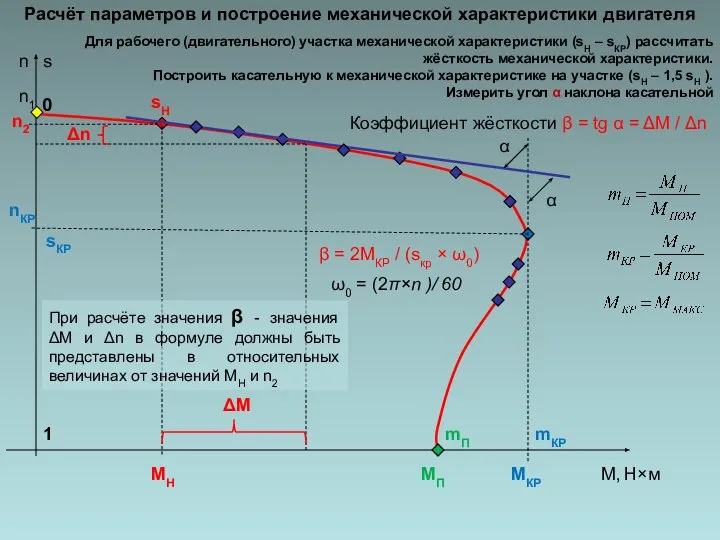
Для рабочего (двигательного) участка
Расчёт параметров и построение механической характеристики двигателя
n
n2
MН
n1
MКР
M, Н×м
MП
sКР
sH
s
Для рабочего (двигательного) участка
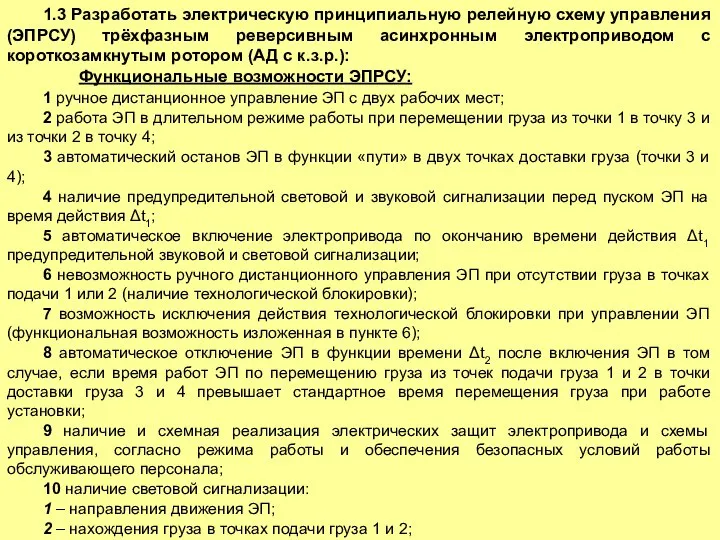
1.3 Разработать электрическую принципиальную релейную схему управления (ЭПРСУ) трёхфазным реверсивным асинхронным
1.3 Разработать электрическую принципиальную релейную схему управления (ЭПРСУ) трёхфазным реверсивным асинхронным
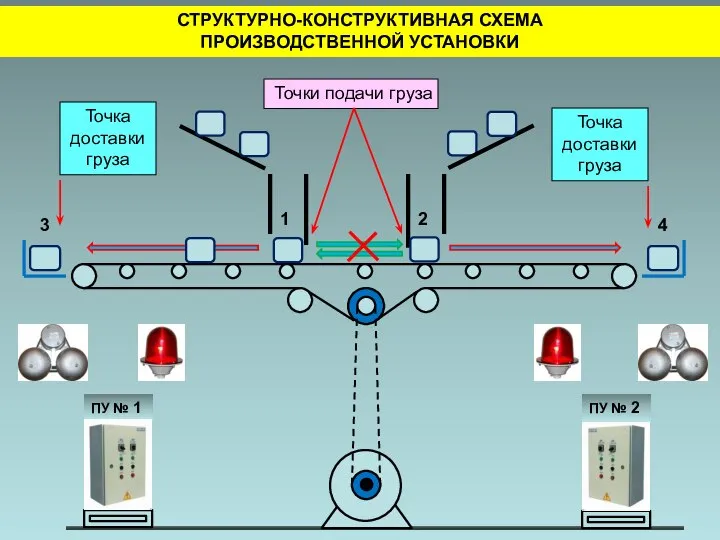
Точки подачи груза
Точка
доставки
груза
Точка
доставки
груза
ПУ № 1
СТРУКТУРНО-КОНСТРУКТИВНАЯ СХЕМА
ПРОИЗВОДСТВЕННОЙ УСТАНОВКИ
3
4
1
2
ПУ № 2
Точки подачи груза
Точка
доставки
груза
Точка
доставки
груза
ПУ № 1
СТРУКТУРНО-КОНСТРУКТИВНАЯ СХЕМА
ПРОИЗВОДСТВЕННОЙ УСТАНОВКИ
3
4
1
2
ПУ № 2
 20140316_trud_i_tvorchestvo
20140316_trud_i_tvorchestvo 20120305_10._povtori_chistogovorki
20120305_10._povtori_chistogovorki Разработка автоматической системы регулирования интервалов движения на железнодорожном перегоне
Разработка автоматической системы регулирования интервалов движения на железнодорожном перегоне Устройство патрона, выключателя
Устройство патрона, выключателя volkova_ebnacproekty_i_reshaem_vmeste_2022
volkova_ebnacproekty_i_reshaem_vmeste_2022 Презентация ЖК “Лефортово Парк”
Презентация ЖК “Лефортово Парк” 20170522_prezentatsiya_vesna_1
20170522_prezentatsiya_vesna_1 Рубский и скопцы
Рубский и скопцы Решение БП на 4 неделю августа
Решение БП на 4 неделю августа Улучшение эффективных показателей автомобилей в АО Гордормостстрой при эксплуатации в условиях г. Киров
Улучшение эффективных показателей автомобилей в АО Гордормостстрой при эксплуатации в условиях г. Киров Организация деятельности структурного подразделения машиностроительного предприятия по изготовлению детали Вал
Организация деятельности структурного подразделения машиностроительного предприятия по изготовлению детали Вал Техническое оснащение и технология работы грузовой станции
Техническое оснащение и технология работы грузовой станции Теплотехнический контроль и сигнализация основных параметров ЦВД турбины К-200-130
Теплотехнический контроль и сигнализация основных параметров ЦВД турбины К-200-130 Биосистема, объекты и методы в биотехнологии
Биосистема, объекты и методы в биотехнологии Запорізький Автомобільний Завод
Запорізький Автомобільний Завод 1881-1894 гг. – правление Александра III в России
1881-1894 гг. – правление Александра III в России Порівняння закладів
Порівняння закладів Тестовые задания для подготовки к ЕГЭ по теме Формы естественного отбора
Тестовые задания для подготовки к ЕГЭ по теме Формы естественного отбора 20130308_obrazovatelnoe_puteshestvie
20130308_obrazovatelnoe_puteshestvie Limitation periods
Limitation periods f6c-35c89872
f6c-35c89872 Святые земли Русской
Святые земли Русской Я, мы, Гитлер: 3 состояния
Я, мы, Гитлер: 3 состояния Мой гардероб. Павел Золотарев
Мой гардероб. Павел Золотарев Отделение непрерывной разливки в составе конвертерного цеха с производительностью 8,5 млн тонн стали в год
Отделение непрерывной разливки в составе конвертерного цеха с производительностью 8,5 млн тонн стали в год Elephone Products 2015
Elephone Products 2015 20130510_kategoriya_geroicheskogo_v_literature_grazhdanskoy_voyny
20130510_kategoriya_geroicheskogo_v_literature_grazhdanskoy_voyny Дизайн проект на тему Растительность на кухне
Дизайн проект на тему Растительность на кухне