- Мультироторные системы

Содержание
- 2. Строение мультикоптера Мультикоптер - это летательный аппарат с произвольным количеством несущих винтов, вращающихся диагонально в противоположных
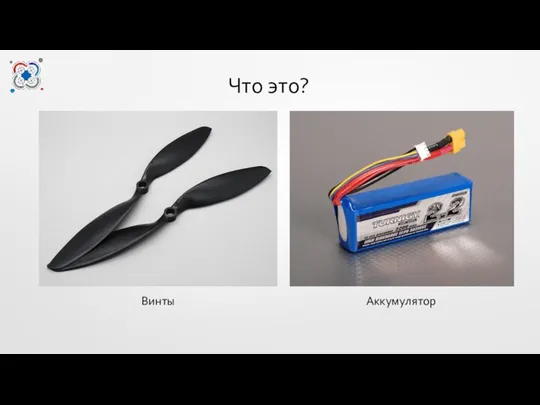
- 3. Что это? Винты Аккумулятор
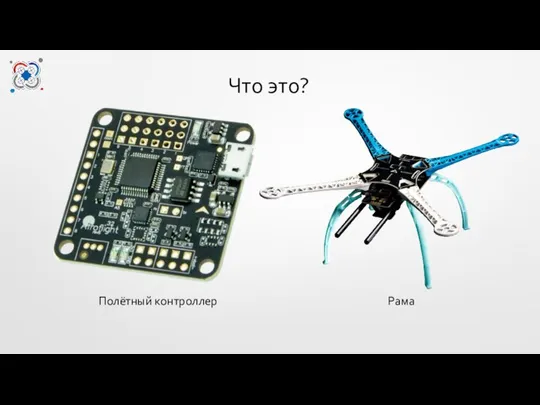
- 4. Что это? Полётный контроллер Рама
- 5. Что это? Пульт радиоуправления Мотор
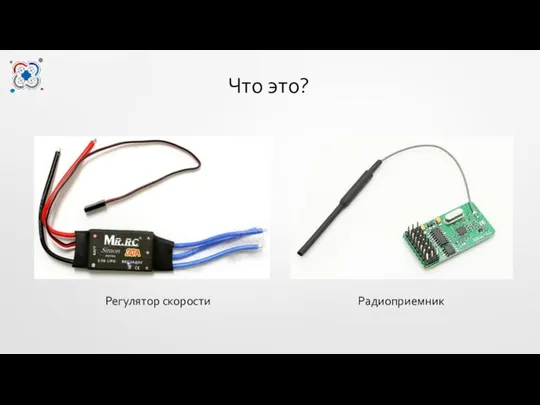
- 6. Что это? Регулятор скорости Радиоприемник
- 7. Конфигурации мультикоптера Конфигурации: 1. Трикоптер 3. Квадрокоптер 2. Гексокоптер 4. Октокоптер Самый простой из них в
- 8. Классическая конструкция квадрокоптера Классический квадрокоптер представляет собой крестообразную раму, на концах лучей которой вертикально закреплены моторы.
- 9. Принципы полёта Синхронно регулируя обороты моторов, можно заставить квадрокоптер подниматься вверх, зависать или опускаться. Если изменить
- 10. Принципы полёта Вращающиеся винты создают реактивный крутящийся момент, который старается развернуть квадрокоптер в сторону, противоположную вращению
- 11. Достоинства квадрокоптеров Простота конструкции и низкая стоимость ущерба при аварии. Квадрокоптеры держатся в воздухе только за
- 12. Недостатки квадрокоптеров Полное отсутствие летучести Квадрокоптер хорошо летает, только пока полностью исправен. Высокий порог знаний Понимание
- 14. Скачать презентацию

Строение мультикоптера
Мультикоптер - это летательный аппарат с произвольным количеством несущих винтов,
Строение мультикоптера
Мультикоптер - это летательный аппарат с произвольным количеством несущих винтов,
Что это?
Винты
Аккумулятор
Что это?
Винты
Аккумулятор
Что это?
Полётный контроллер
Рама
Что это?
Полётный контроллер
Рама

Что это?
Пульт радиоуправления
Мотор
Что это?
Пульт радиоуправления
Мотор
Что это?
Регулятор скорости
Радиоприемник
Что это?
Регулятор скорости
Радиоприемник
Конфигурации мультикоптера
Конфигурации:
1. Трикоптер 3. Квадрокоптер
2. Гексокоптер 4. Октокоптер
Самый простой из них в сборке
Конфигурации мультикоптера
Конфигурации:
1. Трикоптер 3. Квадрокоптер
2. Гексокоптер 4. Октокоптер
Самый простой из них в сборке
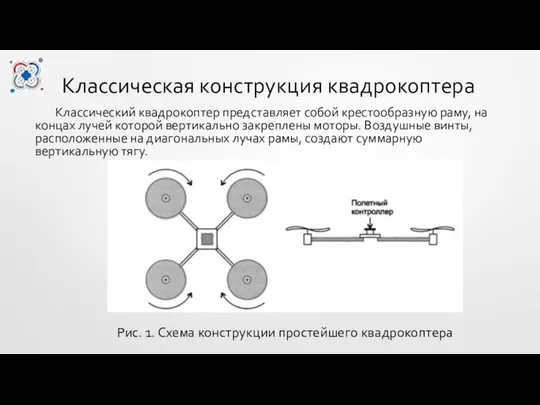
Классическая конструкция квадрокоптера
Классический квадрокоптер представляет собой крестообразную раму, на концах лучей
Классическая конструкция квадрокоптера
Классический квадрокоптер представляет собой крестообразную раму, на концах лучей
Принципы полёта
Синхронно регулируя обороты моторов, можно заставить квадрокоптер подниматься вверх, зависать
Принципы полёта
Синхронно регулируя обороты моторов, можно заставить квадрокоптер подниматься вверх, зависать
Принципы полёта
Вращающиеся винты создают реактивный крутящийся момент, который старается развернуть квадрокоптер
Принципы полёта
Вращающиеся винты создают реактивный крутящийся момент, который старается развернуть квадрокоптер
Достоинства квадрокоптеров
Простота конструкции и низкая стоимость ущерба при аварии.
Квадрокоптеры держатся в
Достоинства квадрокоптеров
Простота конструкции и низкая стоимость ущерба при аварии.
Квадрокоптеры держатся в
Недостатки квадрокоптеров
Полное отсутствие летучести
Квадрокоптер хорошо летает, только пока полностью исправен.
Высокий порог
Недостатки квадрокоптеров
Полное отсутствие летучести
Квадрокоптер хорошо летает, только пока полностью исправен.
Высокий порог
 Афиша на А 3 (для редактирования)
Афиша на А 3 (для редактирования) Пожаро – и взрывоопасные объекты
Пожаро – и взрывоопасные объекты Виды СОЖ
Виды СОЖ Лексическая тема Семья
Лексическая тема Семья easter-game_6_teacher_switcher
easter-game_6_teacher_switcher Отчет по ПДП
Отчет по ПДП 20130113_prezentaciya_k_pedsovetu
20130113_prezentaciya_k_pedsovetu Вариант 1_Представление замысла проекта
Вариант 1_Представление замысла проекта Природа и архитектура. Организация архитектурно-ландшафтного пространства
Природа и архитектура. Организация архитектурно-ландшафтного пространства Презентация без названия
Презентация без названия Электрооборудование промышленности и электроснабжение. Электроустановки для сварки. Электрическая дуга. (Тема 1.5)
Электрооборудование промышленности и электроснабжение. Электроустановки для сварки. Электрическая дуга. (Тема 1.5) Культурные практики в проектной деятельности дошкольников
Культурные практики в проектной деятельности дошкольников Самой лучшей бабушке в мире
Самой лучшей бабушке в мире Презентация_к_выступлению_на_педсовете
Презентация_к_выступлению_на_педсовете Развитие электроники. Диоды
Развитие электроники. Диоды Отчет по производственно-технологической практике. принципы технического контроля параметров рентгенодиагностических аппаратов
Отчет по производственно-технологической практике. принципы технического контроля параметров рентгенодиагностических аппаратов Как выжить при ядерной катастрофе
Как выжить при ядерной катастрофе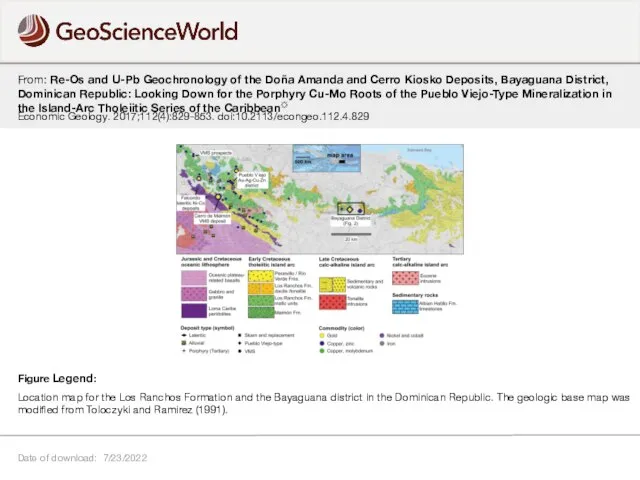 Figure (1)
Figure (1) 20130409_zimuyushchie_pticy
20130409_zimuyushchie_pticy СУ при гостевой комнате
СУ при гостевой комнате Электромонтажные и проектные работы. Лаборатория электроизмерений АВС-электро
Электромонтажные и проектные работы. Лаборатория электроизмерений АВС-электро Динамика изменения дальности транспортирования. Кейс-метод
Динамика изменения дальности транспортирования. Кейс-метод ООО БСЭС-Иркутск
ООО БСЭС-Иркутск Я и мой клан в Blackfire
Я и мой клан в Blackfire ТУР 2 Жизнь в цвете
ТУР 2 Жизнь в цвете Отчёт бюро геодезии ОАО Прокатмонтаж
Отчёт бюро геодезии ОАО Прокатмонтаж Итоговая аттестация по истории: проблемы и перспективы
Итоговая аттестация по истории: проблемы и перспективы Музыкальные ребусы 1
Музыкальные ребусы 1