- MUSU_2020_l1-l9

Содержание
- 2. Лекция 1 Элементы дискретных систем
- 3. Общие сведения о микропроцессорных системах управления Из всех методов, используемых для цифровой обработки сигналов, наиболее важным
- 4. Дискретизация Цифро-аналоговый преобразователь (ЦАП) и схема сглаживания (СС) служат для преобразования последовательности чисел в выходной аналоговый
- 5. Рис.2.1. Классическая а) и магистральная б) структуры цифровых систем.
- 6. Потребляемая мощность Основными параметрами цифровых систем являются мощность потребляемая от источников питания, и производительность. Потребляемая мощность
- 7. Производительность универсальных ЭВМ Для сложения или вычитания двоичных чисел («короткие» операции) требуется обычно 4-5 тактов машинного
- 8. Как показатель качества системы часто используют отношение (скорость/мощность), которое определяет научно-технический уровень ее структурной, схемотехнической и
- 9. Важнейшей характеристикой системы является также ее надежность, определяемая временем безотказной работы То [ч] или средней частотой
- 10. Для больших цифровых систем, например высокопроизводительных вычислительных комплексов, характерен переход к распределенной структуре. При этом каждое
- 11. Особым классом являются мультипроцессорные системы, процессорная часть которых состоит из нескольких процессоров. Такая структура обеспечивает повышение
- 12. . Мини- и микро-ЭВМ обычно имеют магистральную структуру (рис. 2.1, б), при которой обмен информацией между
- 13. Классификация и основные параметры цифровых микросхем Современная технология позволяет изготавливать микросхемы, содержащие десятки тысяч логических элементов.
- 14. Логическая схема измерения (а) и их переходные характеристики (б).
- 15. Элементы транзисторно-транзисторной логики (ТТЛ) . Типовая передаточная характеристика и зависимости напряжений на базах транзисторов То, Т1
- 16. Топология одного из используемых вариантов МЭТ Многоэмиттерный транзистор а) топология; б) эквивалентная схема.
- 17. Переходные процессы в элементе ТТЛ с простым инвертором. Процесс переключения элемента состоит из нескольких этапов: -Спад
- 18. Элемент И-НЕ ТТЛ со сложным инвертором. Типовая передаточная характеристика и зависимости Uб0, Uб1,
- 19. Элемент И- ИЛИ-НЕ ТТЛ
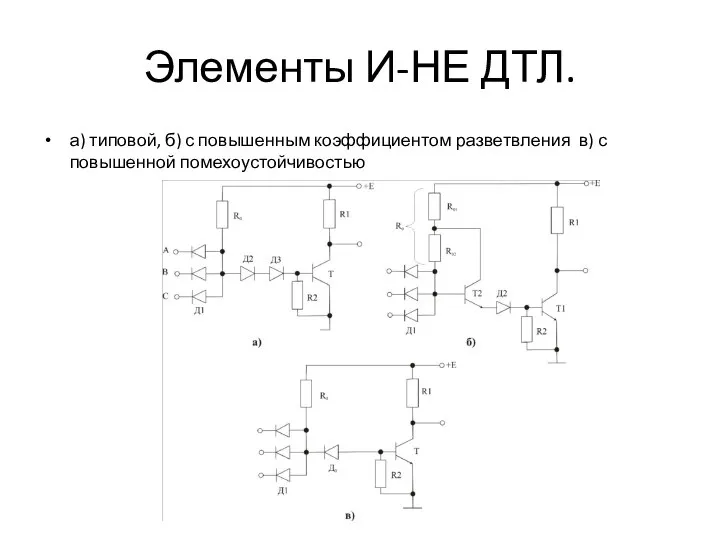
- 20. Элементы И-НЕ ДТЛ. а) типовой, б) с повышенным коэффициентом разветвления в) с повышенной помехоустойчивостью
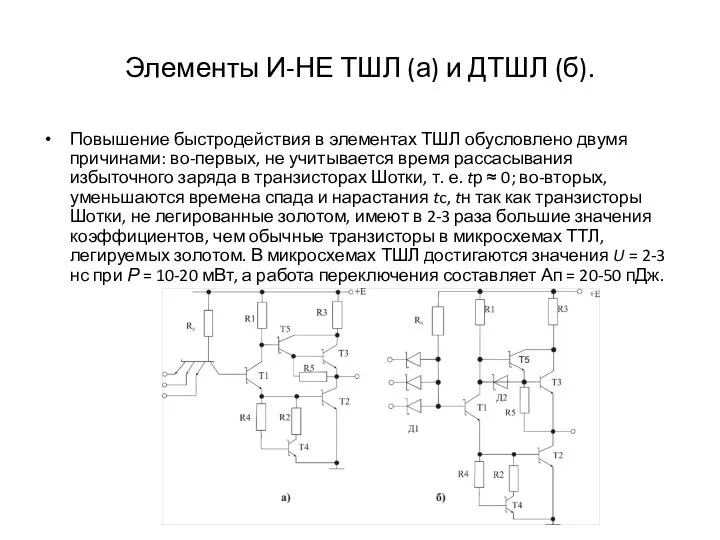
- 21. Элементы И-НЕ ТШЛ (а) и ДТШЛ (б). Повышение быстродействия в элементах ТШЛ обусловлено двумя причинами: во-первых,
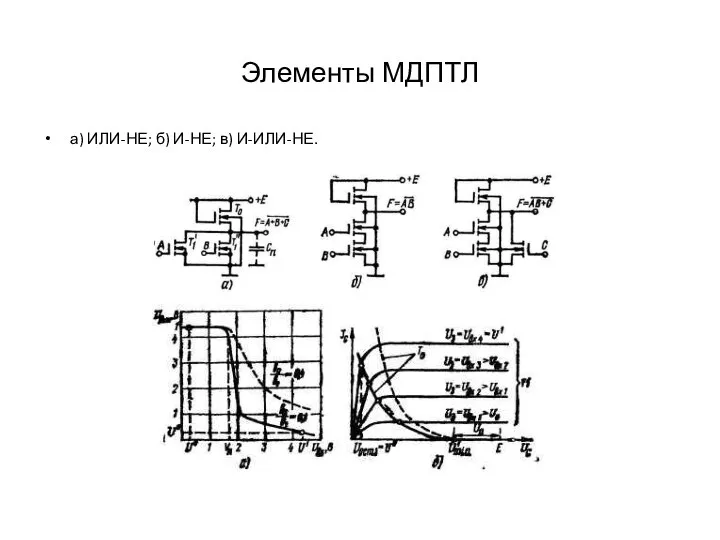
- 22. Элементы МДПТЛ а) ИЛИ-НЕ; б) И-НЕ; в) И-ИЛИ-НЕ.
- 23. Лекция 2 Непрерывные (аналоговые) или цифровые СУ ? Какое решение выбрать?
- 24. Произведения всех действительно даровитых голов отличаются от остальных характером решительности и определённости, и вытекающими из них
- 25. Проведем сравнение непрерывных и дискретных систем управления по трем группам критериев: Проведем сравнение непрерывных и дискретных
- 26. Сравнение по общетехническим характеристикам Масса и габариты; Энергопотребление; Надежность.
- 27. Сравнение по технико-экономическим параметрам Стоимость разработки и изготовления; Стоимость модернизации (изменение алгоритма управления).
- 28. Сравнение с точки зрения процесса управления Точность : Система имеет астатизм 1-го порядка, следовательно, установившаяся ошибка
- 29. Перерегулирования нет, уменьшая постоянную времени Т мы можем добиться уменьшения времени переходного процесса. Теперь рассмотрим вариант
- 30. Дискретная организация блока управления Будем считать, что в течение периода
- 31. Рассмотрим произвольно взятый интервал времени Можем записать следующие соотношения: Для произвольного момента времени: где определяется начальными
- 32. Для ,
- 33. Таким образом, мы видим, что в цифровой системе устойчивость, точность и качество управления зависят от параметров
- 34. На основании этого можно сделать вывод, что при использовании линейных алгоритмов управления, цифровая система всегда хуже
- 35. Параметры сравнения Непрерывная система Дискретная система Масса и габариты Приблизительно одинаковы Энергопотребление Хуже Лучше Надежность Хуже
- 36. Зависимость эффективности непрерывной и дискретной реализации блока управления от сложности реализуемого алгоритма Из графика видно, что
- 37. Выводы Для дискретной системы усложнение алгоритма приводит лишь к изменению программы, что не влияет ни на
- 38. Вывод: Дискретная система управления имеет два основных преимущества по сравнению с непрерывной системой: Простота модернизации (изменения
- 40. Лекция 3 Микропроцессорные системы управления Структура. Требования. Типы МК.
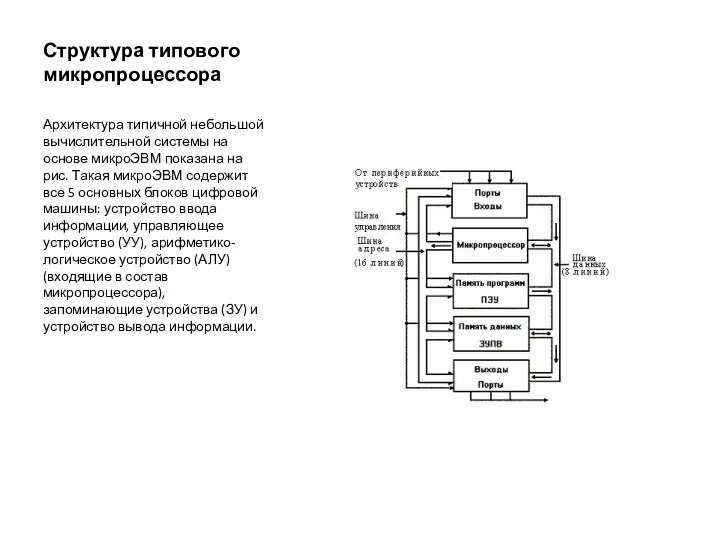
- 41. Структура типового микропроцессора Архитектура типичной небольшой вычислительной системы на основе микроЭВМ показана на рис. Такая микроЭВМ
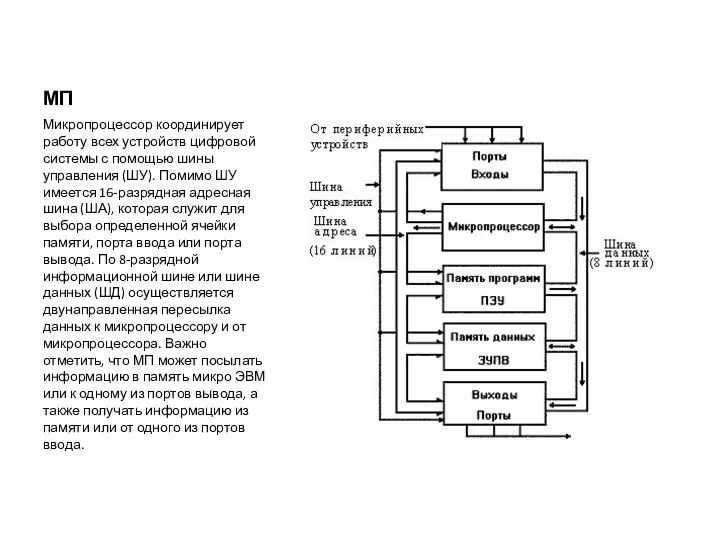
- 42. МП Микропроцессор координирует работу всех устройств цифровой системы с помощью шины управления (ШУ). Помимо ШУ имеется
- 43. Управляющие блоки низкая стоимость, высокая надежность, высокая степень миниатюризации, малое энергопотребление, работоспособность в жестких условиях эксплуатации;
- 44. Классификация микропроцессорных систем Архитектура микропроцессора Микроархитектура микропроцессора - это аппаратная организация и логическая структура микропроцессора, регистры,
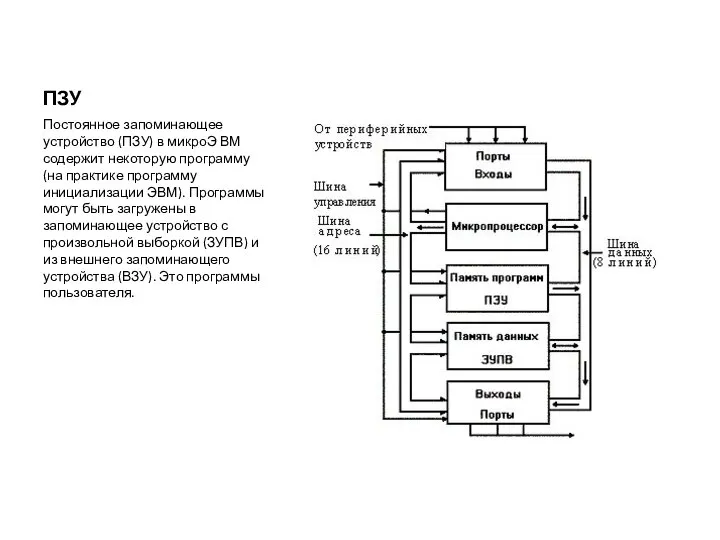
- 45. ПЗУ Постоянное запоминающее устройство (ПЗУ) в микроЭ ВМ содержит некоторую программу (на практике программу инициализации ЭВМ).
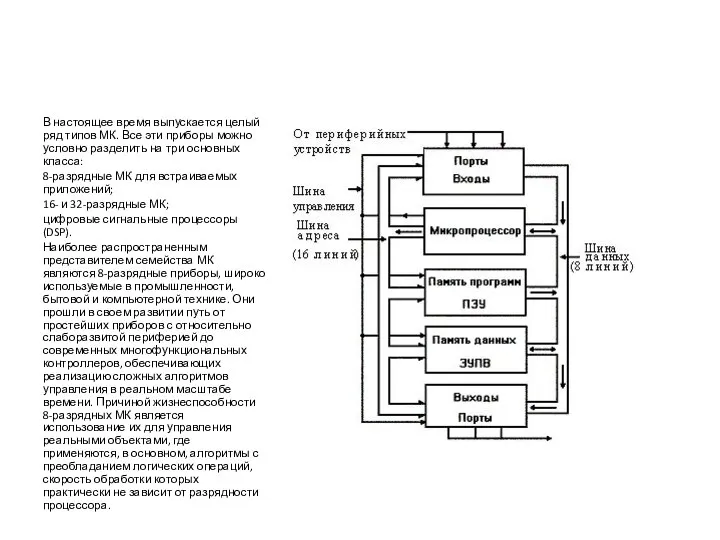
- 46. В настоящее время выпускается целый ряд типов МК. Все эти приборы можно условно разделить на три
- 47. Логическая структура микропроцессора Логическая структура микропроцессора, т. е. конфигурация составляющих микропроцессор логических схем и связей между
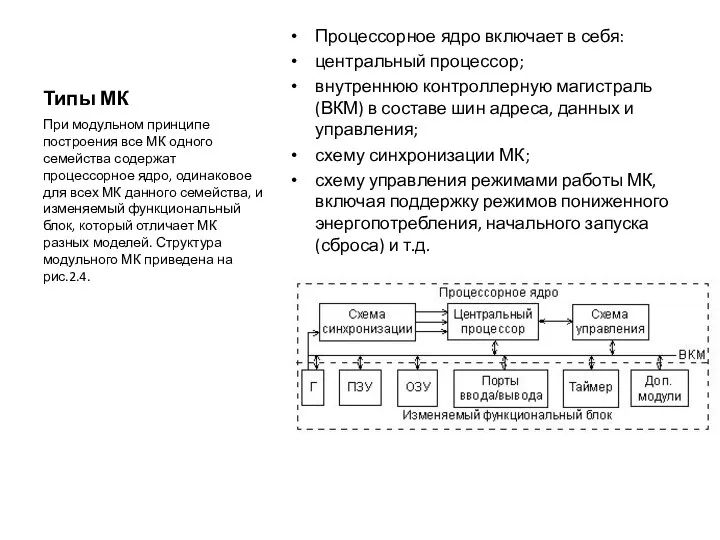
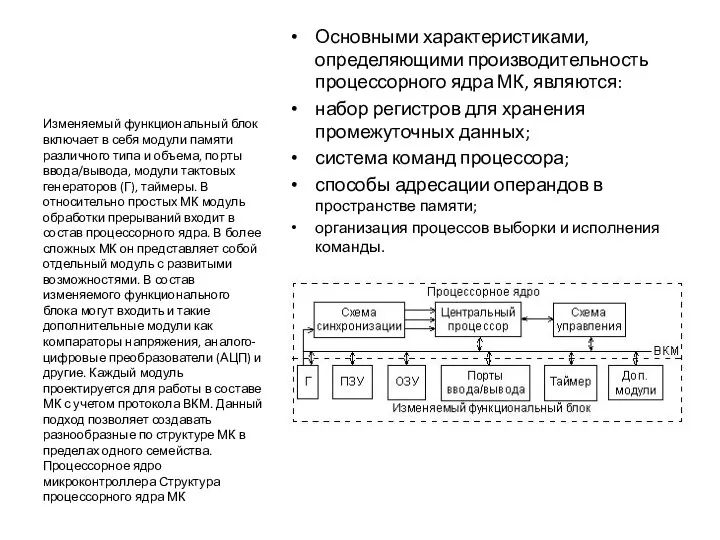
- 48. Типы МК модульная организация, при которой на базе одного процессорного ядра (центрального процессора) проектируется ряд (линейка)
- 49. Типы МК Процессорное ядро включает в себя: центральный процессор; внутреннюю контроллерную магистраль (ВКМ) в составе шин
- 50. Основными характеристиками, определяющими производительность процессорного ядра МК, являются: набор регистров для хранения промежуточных данных; система команд
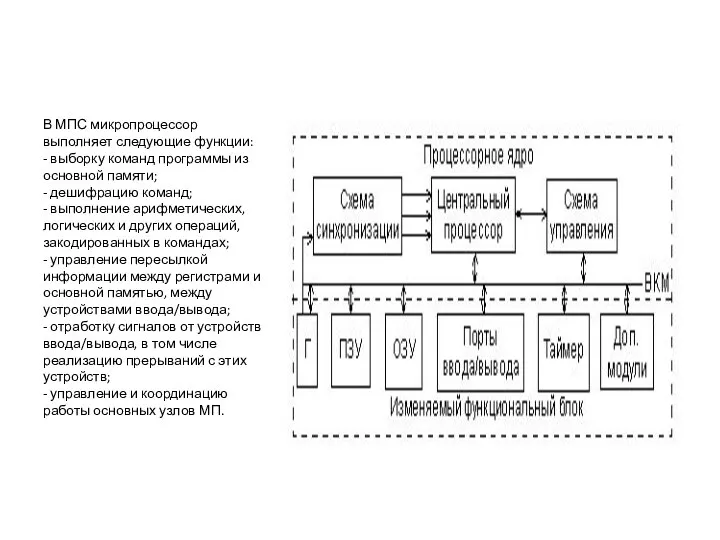
- 51. В МПС микропроцессор выполняет следующие функции: - выборку команд программы из основной памяти; - дешифрацию команд;
- 52. Архитектура CISC-процессоры выполняют большой набор команд с развитыми возможностями адресации, давая разработчику возможность выбрать наиболее подходящую
- 53. Аритектура В процессорах с RISC-архитектурой набор исполняемых команд сокращен до минимума. Для реализации более сложных операций
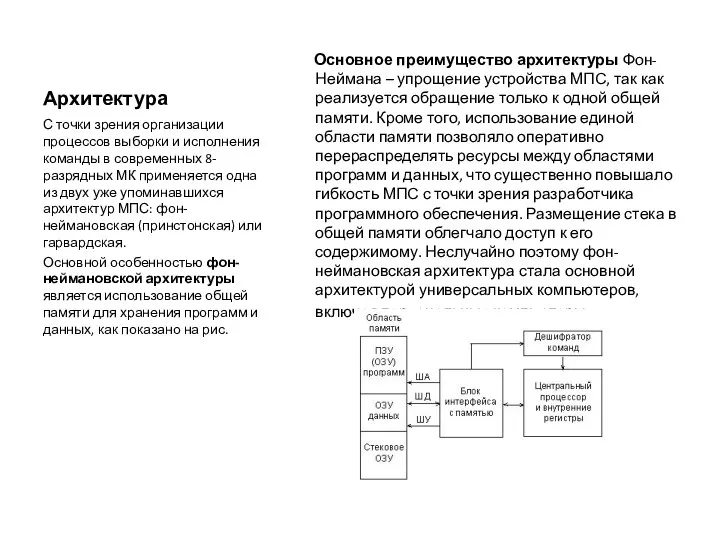
- 54. Архитектура Основное преимущество архитектуры Фон-Неймана – упрощение устройства МПС, так как реализуется обращение только к одной
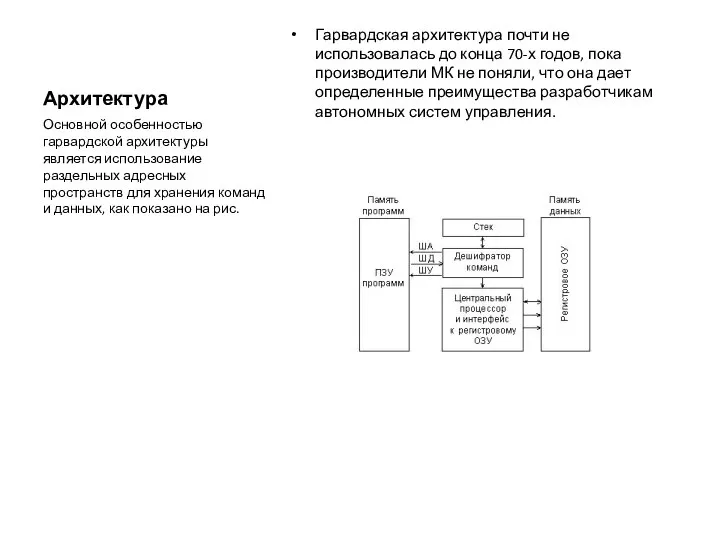
- 55. Архитектура Гарвардская архитектура почти не использовалась до конца 70-х годов, пока производители МК не поняли, что
- 56. Архитектура По опыту использования МПС для управления различными объектами, для реализации большинства алгоритмов управления такие преимущества
- 57. Архитектура Большинство производителей современных 8-разрядных МК используют гарвардскую архитектуру. Однако гарвардская архитектура является недостаточно гибкой для
- 58. Классификация команд.
- 59. Типы архитектур Определяя в качестве основной характеристики МП разрядность, выделяют следующие типы МП архитектуры: - с
- 60. Принципиальная электрическая схема модуля MCU42-3.
- 61. Принципиальная электрическая схема модуля OUT1-X.
- 62. Принципиальная электрическая схема модуля OUT9-1.Х.
- 63. Лекция 4 Современные микроконтроллеры
- 64. Знакомство с АРМ В состав МК входят следующие периферийные устройства: 43 линии ввода-вывода общего назначения, объединенные
- 65. Отладочная плата 1986EvBrd_64 Отладочная плата 1986EvBrd_64, выпускаемая фирмой «Миландр», предназначена для ознакомления с возможностями микроконтроллера К1986ВЕ92QI
- 66. Программатор Для загрузки программ, написанных с помощью персонального компьютера, во Flash-память МК, а также для их
- 67. Отображение информации Среда программирования Keil μVision Интегрированная среда программирования Keil μVision MDK-ARM предназначена для написания и
- 68. Программная модель внешнего устройства
- 69. Форматы передачи данных Существуют два способа передачи слов информации по линиям данных: параллельный, когда одновременно пересылаются
- 70. Ошибка из-за рассинхронизации генераторов передатчика и приемника
- 71. Параллельная передача данных В простом контроллере ВУ, обеспечивающем побайтную передачу данных на внешнее устройство в шине
- 72. Блок-схема простого контроллера ВУ, обеспечивающего побайтный прием данных из ВУ, приведена на рис. В этом контроллере
- 73. Синхронный последовательный интерфейс Простой контроллер для синхронной передачи данных в ВУ по последовательной линии связи (последовательный
- 74. Асинхронный последовательный интерфейс Организация асинхронного последовательного обмена данными с внешним устройством осложняется тем, что на передающей
- 75. Контроллер последовательного асинхронного приема Уровень логической единицы поступает по линии "Данные" в контроллер для асинхронного приема
- 76. Способы обмена информацией в микропроцессорной системе В ЭВМ применяются три режима ввода/вывода: программно-управляемый ВВ (называемый также
- 77. Организация прерываний в микроЭВМ Одной из разновидностей программно-управляемого обмена данными с ВУ в микроЭВМ является обмен
- 78. Структура единой программы обработки прерываний и ее связь с основной программой Организация прерываний с программным опросом
- 79. Формирование векторов прерывания в контроллере ВУ В контроллере используются регистр вектора прерывания и схема совпадения И3.
- 80. Реализация приоритетов ВУ в микроЭВМ с векторной системой прерываний с интерфейсным вектором (ППР (вх.) - "Предоставление
- 81. Организация прямого доступа к памяти Одним из способов обмена данными с ВУ является обмен в режиме
- 82. Память в микропроцессорной системе Ячейка статического ОЗУ. Запоминающая ячейка динамического ОЗУ. Для функционирования компьютерной системы необходимо
- 83. Микросхемы ОЗУ (К573РУ9) и ППЗУ (К573РФ5) в составе микропроцессорной системы. Пример взаимодействия программируемых ИМС параллельного порта
- 84. Буферная память В вычислительных системах используются подсистемы с различным быстродействием, и, в частности, с различной скоростью
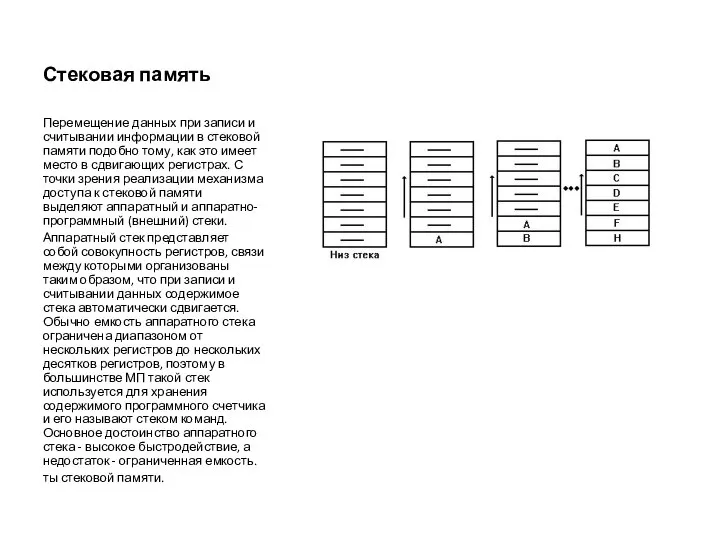
- 85. Стековая память Перемещение данных при записи и считывании информации в стековой памяти подобно тому, как это
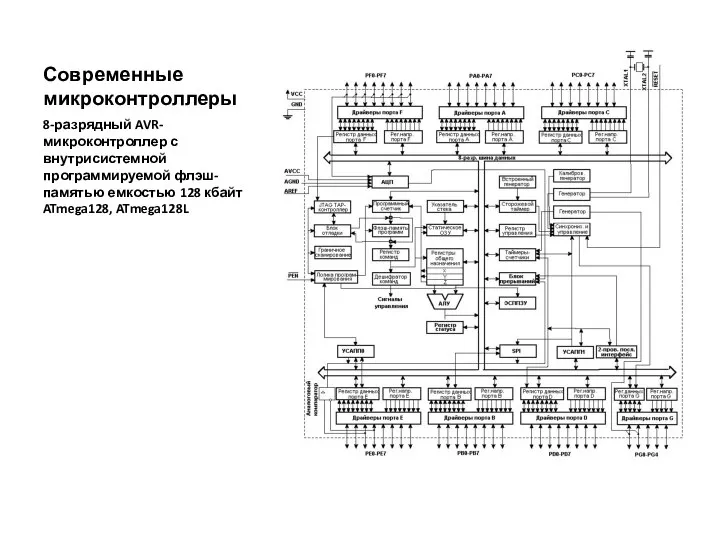
- 86. Современные микроконтроллеры 8-разрядный AVR-микроконтроллер с внутрисистемной программируемой флэш-памятью емкостью 128 кбайт ATmega128, ATmega128L
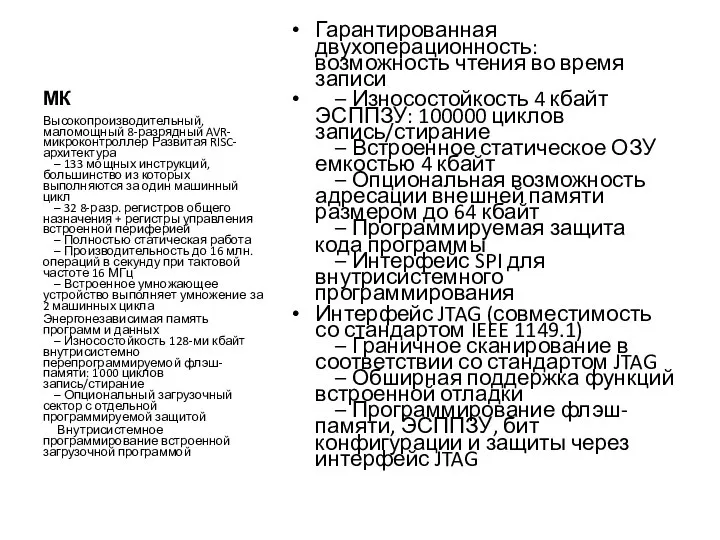
- 87. МК Гарантированная двухоперационность: возможность чтения во время записи – Износостойкость 4 кбайт ЭСППЗУ: 100000 циклов запись/стирание
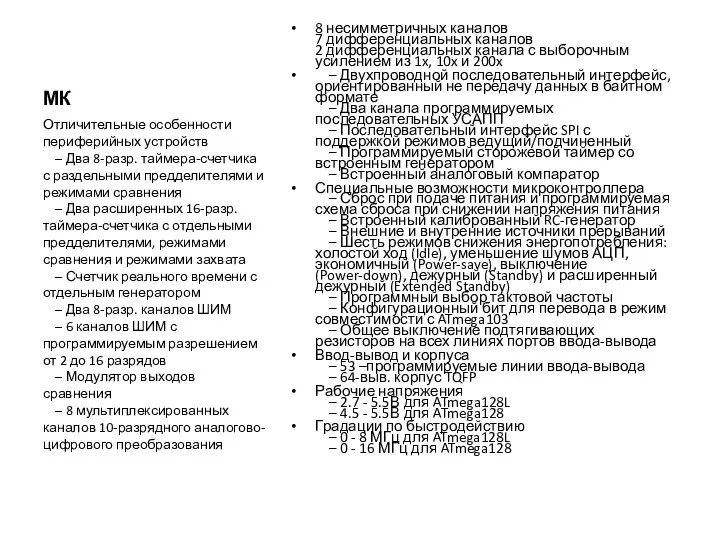
- 88. МК 8 несимметричных каналов 7 дифференциальных каналов 2 дифференциальных канала с выборочным усилением из 1x, 10x
- 89. Краткий обзор архитектуры В целях достижения максимальной производительности и параллелелизма у AVR-микроконтроллеров используется Гарвардская архитектура с
- 90. АЛУ – арифметико-логическое устройство Высокопроизводительное АЛУ AVR-микроконтроллеров работает в непосредственной связи со всеми 32 универсальными рабочими
- 91. Статическое ОЗУ памяти данных ATmega128 поддерживает две различные конфигурации статического ОЗУ памяти данных ). Конфигурация Встроенное
- 92. Адресация 32 рабочих регистров общего назначения, 64 регистра ввода-вывода и 4096 байт внутреннего статического ОЗУ данных
- 93. Временная диаграмма доступа к памяти
- 94. Интерфейс внешней памяти Характеристики интерфейса внешней памяти позволяет его использовать не только для подключения к внешнему
- 95. Порты ввода-вывода Все порты ввода-вывода (ПВВ) AVR-микроконтроллеров работают по принципу чтение-модификация-запись при использовании их в качестве
- 96. Организация универсального цифрового ввода-вывода Для каждого порта ввода-вывода в памяти ввода-вывода зарезервировано три ячейки: одна под
- 97. Лекция 5 Функциональные узлы МК. Устройства аналогового ввода –вывода.
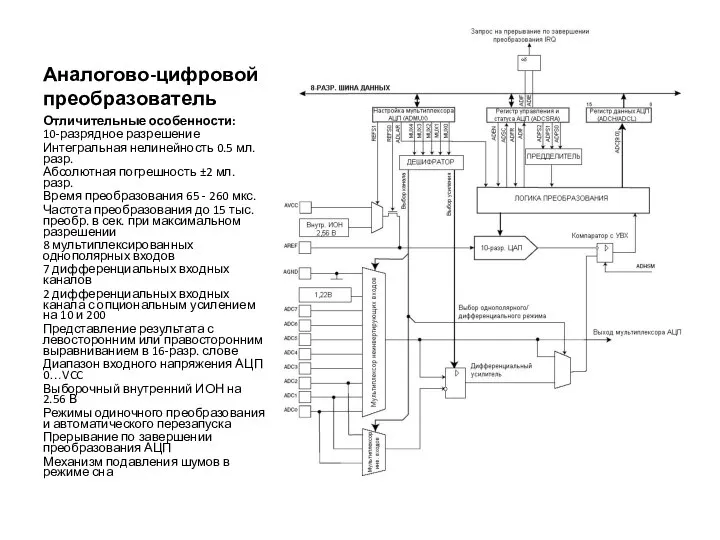
- 98. Аналогово-цифровой преобразователь Отличительные особенности: 10-разрядное разрешение Интегральная нелинейность 0.5 мл. разр. Абсолютная погрешность ±2 мл. разр.
- 99. АЦП АЦП имеет отдельный вывод питания AVCC (аналоговое питание). AVCC не должен отличаться более чем на
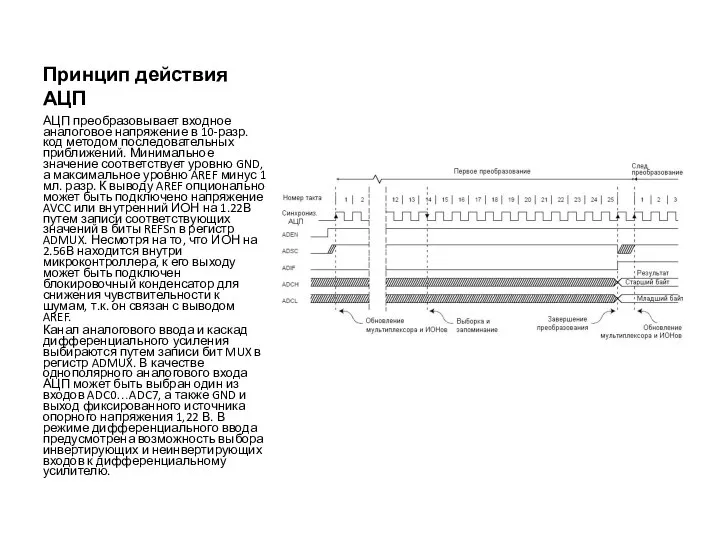
- 100. Принцип действия АЦП АЦП преобразовывает входное аналоговое напряжение в 10-разр. код методом последовательных приближений. Минимальное значение
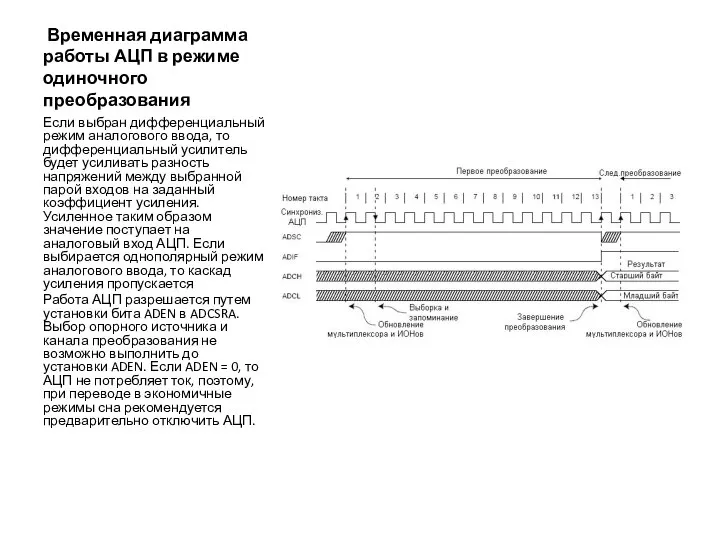
- 101. Временная диаграмма работы АЦП в режиме одиночного преобразования Если выбран дифференциальный режим аналогового ввода, то дифференциальный
- 102. Временная диаграмма работы АЦП в режиме автоматического перезапуска АЦП генерирует 10-разрядный результат, который помещается в пару
- 103. Погрешность смещения
- 104. Погрешность усиления
- 105. Интегральная нелинейность (ИНЛ)
- 106. Дифференциальная нелинейность (ДНЛ)
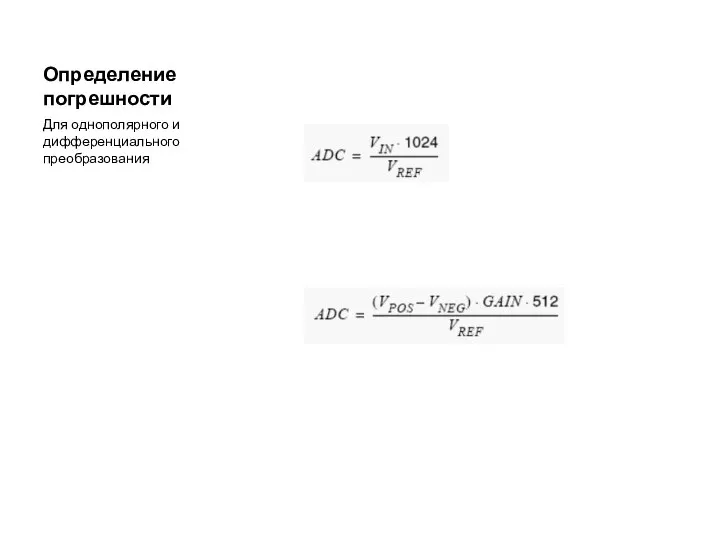
- 107. Определение погрешности Для однополярного и дифференциального преобразования
- 108. Функция преобразования АЦП при измерении дифференциального сигнала
- 109. Внешние прерывания Внешние прерывания осуществляются через выводы INT7:0. Обратите внимание, что после разрешения внешние прерывания будут
- 110. 16-разрядные таймеры-счетчики 1 и 3 Основные отличительные особенности: 16-разрядные счетчики (в т.ч. возможность организации 16-разр. ШИМ)
- 111. Регистры Регистр таймера-счетчика (TCNTn), регистры порогов сравнения (OCRnA/B/C), a также регистр захвата (ICRn) являются 16-разрядными регистрами.
- 112. Временная диаграмма таймера-счетчика с предделением на 8
- 113. Лекция 6 ПРОЕКТИРОВАНИЕ МИКРОПРОЦЕССОРНЫХ СИСТЕМ. УРОВНИ ПРЕДСТАВЛЕНИЯ МИКРОПРОЦЕССОРНОЙ СИСТЕМЫ
- 114. ПРОЕКТИРОВАНИЕ МИКРОПРОЦЕССОРНЫХ СИСТЕМ УРОВНИ ПРЕДСТАВЛЕНИЯ МИКРОПРОЦЕССОРНОЙ СИСТЕМЫ Микропроцессорная система может быть описана, например, на одном из
- 115. Отладка О правильности функционирования микропроцессорной системы на уровне "черного ящика" с полностью неизвестной внутренней структурой можно
- 116. Диагностика неисправности Точность, с которой тот или иной тест локализует неисправности, называется его разрешающей способностью. Требуемая
- 117. Функции средств отладки Средства отладки должны: 1) управлять поведением системы или/и ее модели на различных уровнях
- 118. Этапы проектирования микропроцессорных систем При проектировании многопроцессорных микропроцессорных систем, содержащих несколько типов микропроцессорных наборов, необходимо решать
- 119. Технология разработки микропроцессорных контроллеров В качестве основного метода разработки микропроцессорных систем фирмой Intel в 70-х годах
- 120. Технология МК В настоящее время средства моделирования в схемных эмуляторах, которые мы называем имитирующим процессором, в
- 121. Технология МК Требования начинают цикл проектирования микропроцессорного контроллера. Особенностью именно микропроцессорных контроллеров является то, что возможности
- 122. Технология МК Критерием выбора является максимальное увеличение программы и уменьшение аппаратуры при обеспечении заданных показателей быстродействия
- 123. Технология МК На этапе разработки структуры микропроцессорного контроллера окончательно определяется состав имеющихся и подлежащих разработке аппаратных
- 124. Квазипараллельные процессы в микропроцессорных системах управления Часть типовых операций управления, необходимых для связи с реальными объектами,
- 125. Лекция7 Персональные компьютеры и программируемые логические контроллеры в системах управления
- 126. История развития средств автоматизации С развитием средств автоматизации возникают новые требования к способам хранения, отображения и
- 127. Первыми средствами автоматизации, которые исполняли логические операции, связанные с управлением были релейные схемы. Эти схемы использовали
- 128. ПК или ПЛК Персональные компьютеры класса PC всегда служили для построения высших уровней в иерархии систем
- 129. Со временем персональные компьютеры получили возможность реализации управляющих функций в реальном времени, по-прежнему обладая высоким уровнем
- 130. С другой стороны, на рынке появились программируемые контроллеры со встроенными функциями, характерными для персональных компьютеров, поддерживающие
- 131. Метод работы системы управления очень важен. А также то, каким образом выполняются отдельные задачи управления. Стандартные
- 132. Персональные компьютеры с запущенным ядром реального времени или операционной системой реального времени могут обеспечить тот же
- 133. Выполнение задач управления в реальном времени означает, что их выполнение гарантировано через определенные промежутки времени, именуемое
- 134. Благодаря всему этому персональный компьютер становится более прочным, его устойчивость к внешним факторам приближается к программируемым
- 135. С точки зрения пользователя очень важно, чтобы стоимость сервисного обслуживания системы управления была как можно ниже
- 136. Дополнительным пунктом является минимизация трудозатрат на выполнение сервисного обслуживания и запас нужного количества запасных частей по
- 137. Интеграция аппаратных компонентов Сейчас инженеры обращают внимание на диапазон выбора опций в рамках видов аппаратных компонентов
- 138. Интерфейс оператора является обязательным элементом большинства приложений для систем управления. Компьютеры имеют интерфейс исходя из принципа
- 139. Безопасность приложений Ранее вопрос безопасности системы файлов, a тем самым приложения и данных процесса, хранящихся в
- 140. Отсутствует антивирусное программное обеспечение для программируемых контроллеров, которое бы их защищало. Хотя персональные компьютеры больше подвержены
- 141. Программируемые контроллеры давно используются в автоматизации машин. Помимо обмена данными с исполнительными устройствами и/или датчиками (концевыми
- 142. Главным различием между программируемыми контроллерами и компьютерами PC является способ выполнения программы управления. В простых программируемых
- 143. Современные системы управления, как основанные на ПЛК, так и на PC, часто оснащаются операционными системами реального
- 144. Различия в способе выполнения задач требуют разного подхода к созданию приложений управления. Пользователи часто ограничиваются только
- 145. Для персональных компьютеров типичными языками программирования являются C/C++/.net. Примечание редакции: Компьютерные системы управления, в которых функции
- 146. Стоимость решения Выбор платформы системы управления должен зависеть от разрабатываемого приложения. В зависимости от того, что
- 147. Если система управления требует сложных вычислений, обслуживания крупной сети исполнительных устройств и/или датчиков, обработки большого объема
- 148. Возможности расширения системы управления зависят о того, можно ли добавлять периферийное оборудование, увеличивать вычислительную мощность или
- 149. Программируемые контроллеры с самого начала проектировались для работы в сложных промышленных условиях. В случае компьютеров их
- 150. Многие инженеры знают языки программирования программируемых контроллеров, описанные в стандарте IEC 61131-3. В этих языках имеется
- 151. В настоящее время на рынке появилось много инструментов, благодаря которым научные знания из области теории управления
- 152. Лекция 8 PC или ПЛК: Сравнение опций управления
- 153. PC или ПЛК: Сравнение опций управления Проблема выбора между программируемым логическим контроллером (ПЛК) и промышленным компьютером
- 154. Одним из ключевых решений, принимаемых обычно на начальной стадии проектирования любого оборудования, является выбор типа системы
- 155. Количество решений для систем управления с использованием компьютерных технологий постоянно растет. Тем самым стирается некогда четкая
- 156. Программируемые контроллеры первоначально являлись более удобной, гибкой и надежной альтернативой для шкафов управления с контакторами и
- 157. Со временем обычные программируемые контроллеры эволюционировали в направлении более гибких решений с точки зрения функциональности. Современные
- 158. Любая машина, способная автоматически выполнять некоторые операции, имеет в своем составе управляющий контроллер - модуль, обеспечивающий
- 159. Несомненно, появление первых ПЛК сделало прорыв в сфере автоматизации и послужило революционным скачком по степени внедрения
- 160. В современных ПЛК широко используются аналоговые входы и выходы. Аналоговый или непрерывный сигнал отражает уровень напряжения
- 161. Физическое представление ПЛК. Физически, типичный ПЛК представляет собой блок, имеющий определенный набор выходов и входов, для
- 162. Программируемый логический контроллер Шнайдер Электрик Modicon M340.
- 163. Для классификации огромного разнообразия существующих в настоящее время контроллеров рассмотрим их существенные различия. Основным показателем ПЛК
- 164. По расположению модулей ввода-вывода ПЛК бывают: - моноблочными, в которых устройство ввода-вывода не может быть удаленно
- 165. Часто перечисленные конструктивные типы контроллеров комбинируются, например моноблочный контроллер может иметь несколько съемных плат; моноблочный и
- 166. По области применения контроллеры делятся на следующие типы: - универсальные общепромышленные; - для управления роботами; -
- 167. По способу программирования контроллеры бывают: - программируемые с лицевой панели контроллера; - программируемые переносным программатором; -
- 168. Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей
- 169. Типичный ПЛК представляет собой блок, имеющий определенный набор выходов и входов, для подключения датчиков и исполнительных
- 170. Режимы работы ПЛК. Разрабатывая системы управления, важной характеристикой, которую должен учитывать конструктор, это возможность системы работать
- 171. Для ПЛК существенное значение имеет не только быстродействие самой системы, но и время проектирования, внедрения и
- 172. Специфика применения ПЛК обусловливает необходимость одновременного решения нескольких задач. Прикладная программа может быть реализована в виде
- 173. В некоторых случаях ограничением служит не время реакции на событие, а обязательность его фиксации, например работа
- 174. Интеграция ПЛК в систему управления предприятием. Контроллеры традиционно работают в нижнем звене автоматизированных систем управления предприятием
- 175. Далеко не всегда удается создать полностью автоматическую систему. Часто общее руководство со стороны квалифицированного человека —
- 176. Создание систем диспетчерского управления является отдельным видом бизнеса. Разделение производства ПЛК, средств программирования и диспетчерских систем
- 177. Все это «многоэтажное» объяснение призвано подчеркнуть еще одно немаловажное преимущество ПЛК — средства системной интеграции являются
- 178. Лекция 9 Стандарты МЭК. Языки программирования ПЛК
- 179. Стандарт МЭК. Предпосылки создания. При производстве совместимой продукции (подчиненной требованиям открытого стандарта) фирма производитель может сконцентрироваться
- 180. Создание МЭК. Международная электротехническая комиссия (МЭК, англ. International Electrotechnical Commission, IEC)— международная некоммерческая организация по стандартизации
- 181. В 1979 году в рамках Международной Электротехнической Комиссии (МЭК) была создана специальная группа технических экспертов по
- 182. Простота программирования. Инженер, спроектировавший машину, должен иметь возможность самостоятельно написать программу управления. Никто лучше его не
- 183. Очень часто технологи описывают процесс примерно так: «слегка перемешать, подогреть и довести до готовности». С аппаратными
- 184. Внедрение стандарта дало фундамент для создания единой школы подготовки специалистов. Человек, прошедший обучение по программе, включающей
- 185. Языки МЭК. Стандарт МЭК 61131-3 устанавливает пять языков программирования ПЛК, три графических и два текстовых: LD,
- 186. Язык IL имеет все недостатки, которые присущи другим низкоуровневым языкам программирования: сложность и высокую трудоемкость программирования,
- 187. Язык ST. Язык ST (Structured Text, Структурированный Текст) представляет собой язык высокого уровня, имеющий черты языков
- 188. Пример листинга программы на языке ST. IF Voltage>220 THEN Current:=Current - 10; (*ЕслиV>220 В, то уменьшить
- 189. ЯзыкLD. Графический язык релейной логики впервые появился в виде электрических схем, которые состояли из контактов и
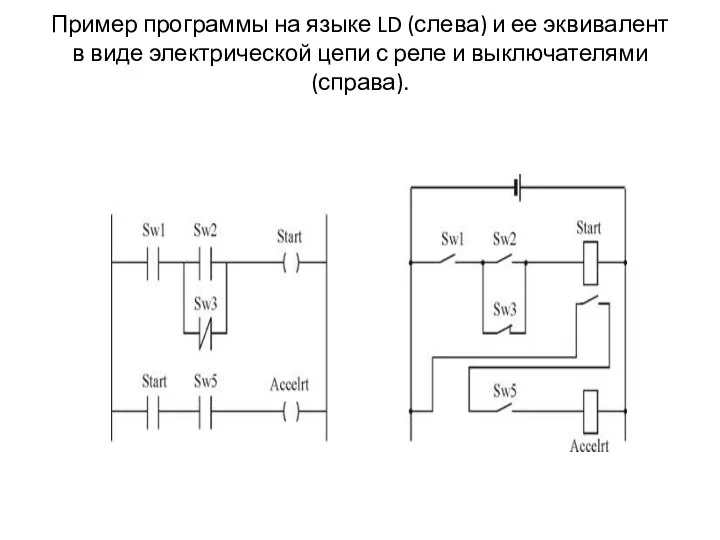
- 190. Пример программы на языке LD (слева) и ее эквивалент в виде электрической цепи с реле и
- 191. Язык FBD. FBD является графическим языком и наиболее удобен для программирования процессов прохождения сигналов через функциональные
- 192. Типичным применением языка FBD является описание "жесткой логики" и замкнутых контуров систем управления. Язык функциональных блоков
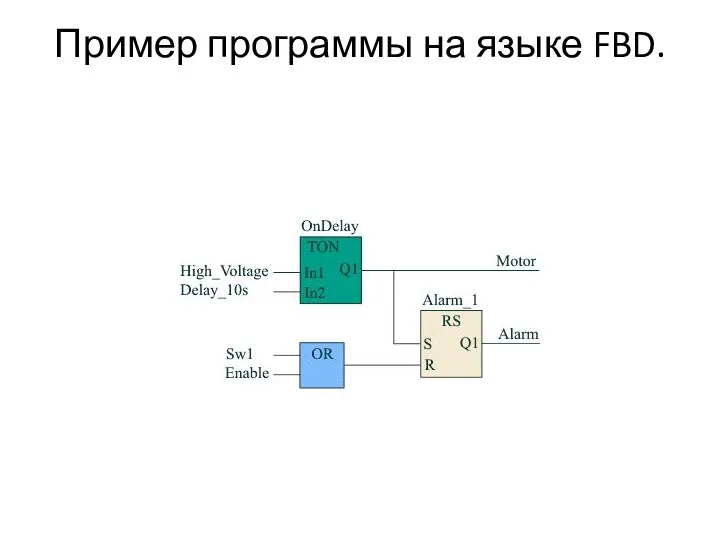
- 193. Пример программы на языке FBD.
- 194. Язык SFC. SFC называют языком программирования, хотя по сути это не язык, а вспомогательное средство для
- 195. Язык SFC предназначен для описания системы управления на самом верхнем уровне абстракции, например, в терминах "Старт",
- 196. На рис. 2.3 показан фрагмент программы на языке SFC. Программа состоит из шагов и условий переходов.
- 197. Пример программы на языке SFC.
- 198. Программное обеспечение для программирования ПЛК. Существует множество комплексов для разработки программного обеспечения. Фирмы, выпускающие промышленные контроллеры,
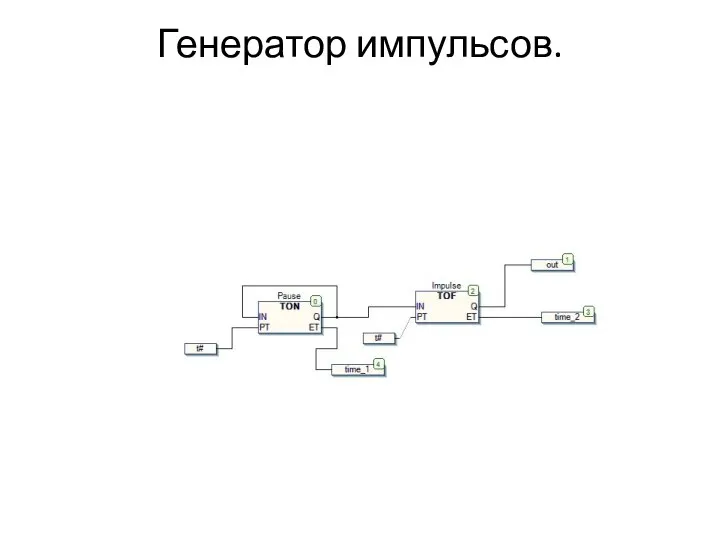
- 199. В CODESYS для программирования доступны все пять определяемых стандартом МЭК 61131-3 языков: В дополнение к FBD
- 200. Генератор импульсов.
- 201. В CODESYS реализован ряд других расширений спецификации стандарта IEC 61131-3. Самым существенным из них является поддержка
- 202. CODESYS версии V3 построен на базе так называемой платформы автоматизации: CODESYS AutomationPlatform. Она позволяет изготовителям оборудования
- 203. Инструмент CODESYS ApplicationComposer позволяет перейти от программирования практических приложений к их быстрому составлению. Пользователь составляет собственную
- 204. TwinCAT. Пакет программного обеспечения Beckhoff TwinCAT превращает любой совместимый ПК в мульти задачную PLC- систему управления
- 205. TwinCAT состоит из run-time системы управления в режиме реального времени, среды программирования, диагностики и конфигурирования системы.
- 206. IL (Язык линейных инструкций), LD (Релейные диаграммы), FBD/CFC (Функциональные блоковые диаграммы), SFC (Последовательные функциональные схемы) ST
- 207. Программирование осуществляется: - локально - через TCP/IP - через промышленные шины (BXxxxx и BCxxxx).. NC (numericalcontrol)
- 208. TwinCAT NC I (интерполяция) - ЧПУ система для линейно-круговой интерполированной траектории перемещения группы осей, каждая из
- 210. Скачать презентацию
Лекция 1
Элементы дискретных систем
Лекция 1
Элементы дискретных систем
Общие сведения о микропроцессорных системах управления
Из всех методов, используемых для цифровой
Общие сведения о микропроцессорных системах управления
Из всех методов, используемых для цифровой
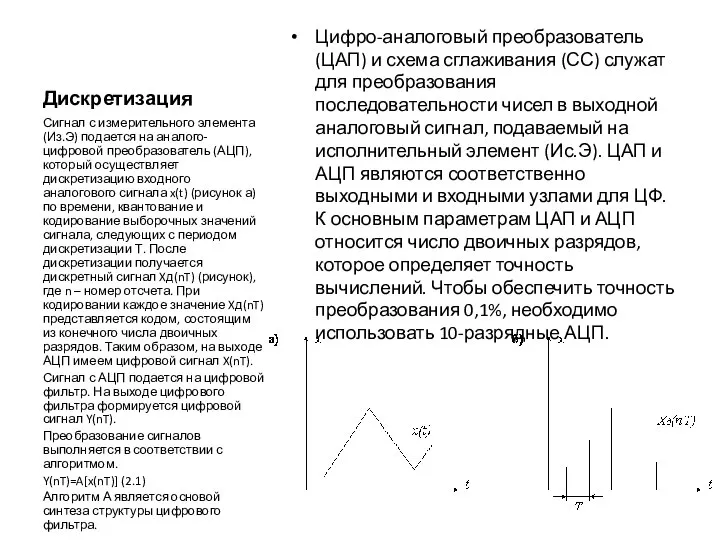
Дискретизация
Цифро-аналоговый преобразователь (ЦАП) и схема сглаживания (СС) служат для преобразования последовательности
Дискретизация
Цифро-аналоговый преобразователь (ЦАП) и схема сглаживания (СС) служат для преобразования последовательности
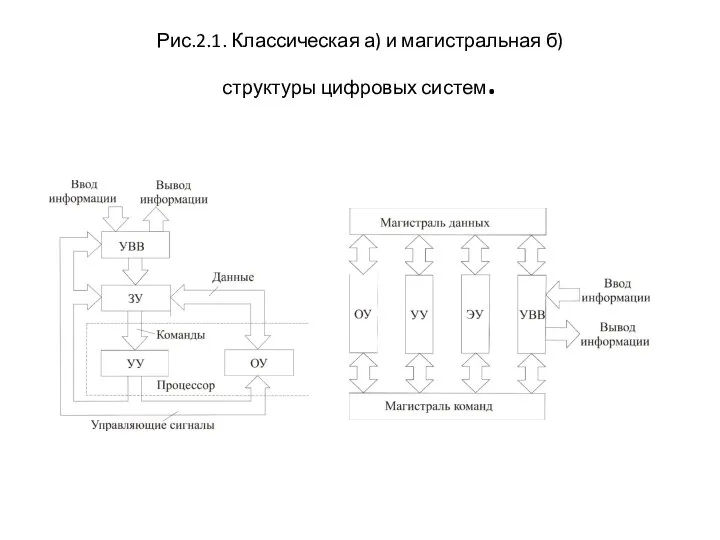
Рис.2.1. Классическая а) и магистральная б)
структуры цифровых систем.
Рис.2.1. Классическая а) и магистральная б)
структуры цифровых систем.
Потребляемая мощность
Основными параметрами цифровых систем являются мощность потребляемая от источников питания,
Потребляемая мощность
Основными параметрами цифровых систем являются мощность потребляемая от источников питания,
Производительность универсальных ЭВМ
Для сложения или вычитания двоичных чисел («короткие» операции)
Производительность универсальных ЭВМ
Для сложения или вычитания двоичных чисел («короткие» операции)
Как показатель качества системы часто используют отношение (скорость/мощность), которое определяет научно-технический
Как показатель качества системы часто используют отношение (скорость/мощность), которое определяет научно-технический
Важнейшей характеристикой системы является также ее надежность, определяемая временем безотказной работы
Важнейшей характеристикой системы является также ее надежность, определяемая временем безотказной работы
Для больших цифровых систем, например высокопроизводительных вычислительных комплексов, характерен переход к
Для больших цифровых систем, например высокопроизводительных вычислительных комплексов, характерен переход к
Особым классом являются мультипроцессорные системы, процессорная часть которых состоит из нескольких
Особым классом являются мультипроцессорные системы, процессорная часть которых состоит из нескольких
. Мини- и микро-ЭВМ обычно имеют магистральную структуру (рис. 2.1, б),
. Мини- и микро-ЭВМ обычно имеют магистральную структуру (рис. 2.1, б),
Классификация и основные параметры цифровых микросхем
Современная технология позволяет изготавливать микросхемы,
Классификация и основные параметры цифровых микросхем
Современная технология позволяет изготавливать микросхемы,
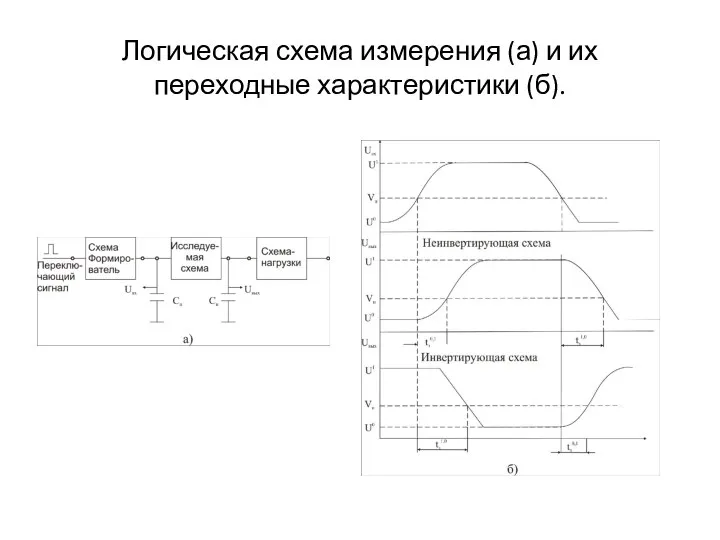
Логическая схема измерения (а) и их переходные характеристики (б).
Логическая схема измерения (а) и их переходные характеристики (б).
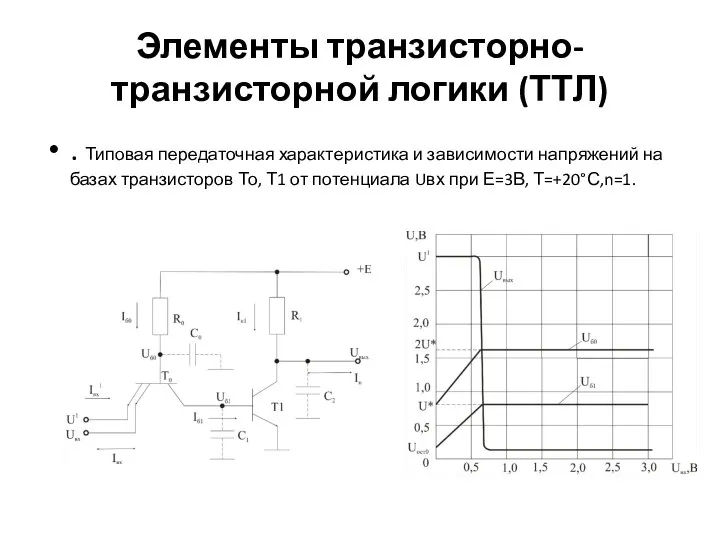
Элементы транзисторно-транзисторной логики (ТТЛ)
. Типовая передаточная характеристика и зависимости напряжений на
Элементы транзисторно-транзисторной логики (ТТЛ)
. Типовая передаточная характеристика и зависимости напряжений на
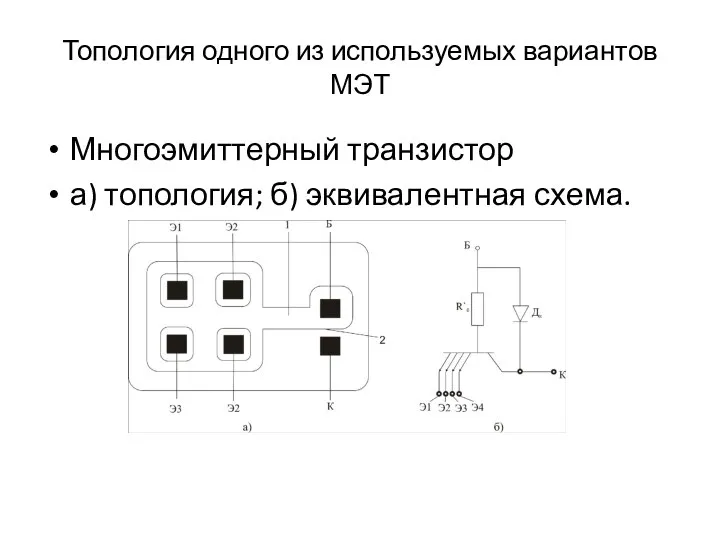
Топология одного из используемых вариантов МЭТ
Многоэмиттерный транзистор
а) топология; б) эквивалентная
Топология одного из используемых вариантов МЭТ
Многоэмиттерный транзистор
а) топология; б) эквивалентная

Переходные процессы в элементе ТТЛ с простым инвертором.
Процесс переключения элемента
Переходные процессы в элементе ТТЛ с простым инвертором.
Процесс переключения элемента
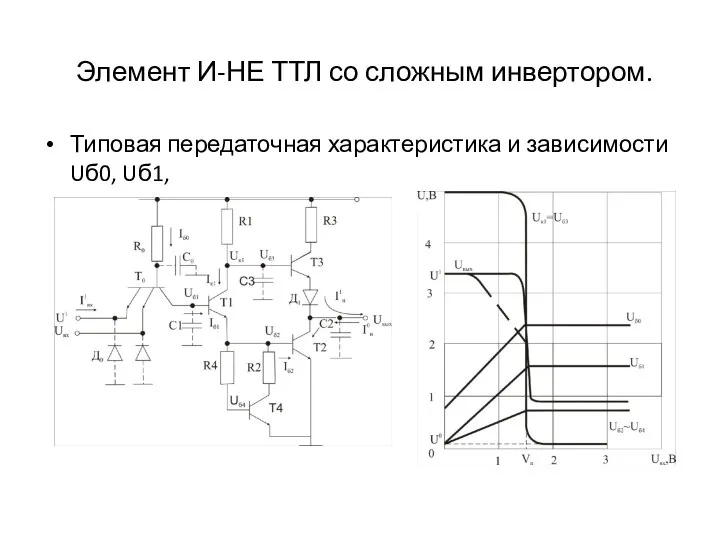
Элемент И-НЕ ТТЛ со сложным инвертором.
Типовая передаточная характеристика и зависимости
Элемент И-НЕ ТТЛ со сложным инвертором.
Типовая передаточная характеристика и зависимости
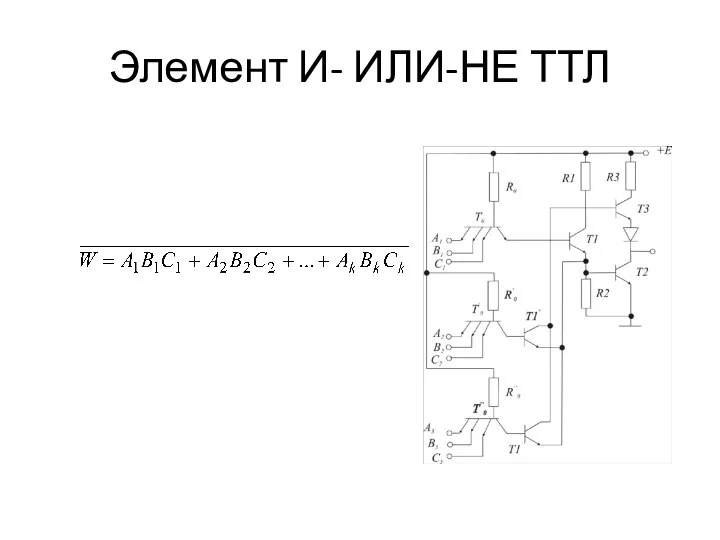
Элемент И- ИЛИ-НЕ ТТЛ
Элемент И- ИЛИ-НЕ ТТЛ
Элементы И-НЕ ДТЛ.
а) типовой, б) с повышенным коэффициентом разветвления в) с
Элементы И-НЕ ДТЛ.
а) типовой, б) с повышенным коэффициентом разветвления в) с
Элементы И-НЕ ТШЛ (а) и ДТШЛ (б).
Повышение быстродействия в элементах ТШЛ
Элементы И-НЕ ТШЛ (а) и ДТШЛ (б).
Повышение быстродействия в элементах ТШЛ
Элементы МДПТЛ
а) ИЛИ-НЕ; б) И-НЕ; в) И-ИЛИ-НЕ.
Элементы МДПТЛ
а) ИЛИ-НЕ; б) И-НЕ; в) И-ИЛИ-НЕ.
Лекция 2
Непрерывные (аналоговые) или цифровые СУ ?
Какое решение выбрать?
Лекция 2
Непрерывные (аналоговые) или цифровые СУ ?
Какое решение выбрать?
Произведения всех действительно даровитых голов отличаются
от остальных характером решительности и определённости,
Произведения всех действительно даровитых голов отличаются
от остальных характером решительности и определённости,
Проведем сравнение непрерывных и дискретных систем управления по трем группам критериев:
Проведем
Проведем сравнение непрерывных и дискретных систем управления по трем группам критериев:
Проведем
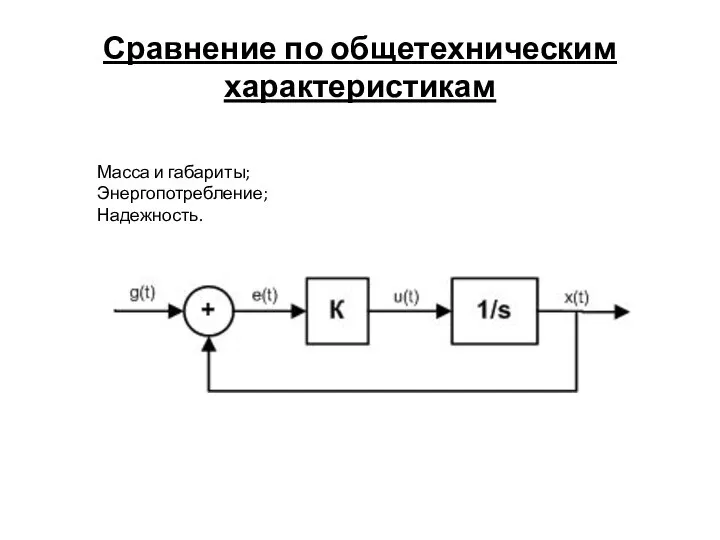
Сравнение по общетехническим характеристикам
Масса и габариты;
Энергопотребление;
Надежность.
Сравнение по общетехническим характеристикам
Масса и габариты;
Энергопотребление;
Надежность.
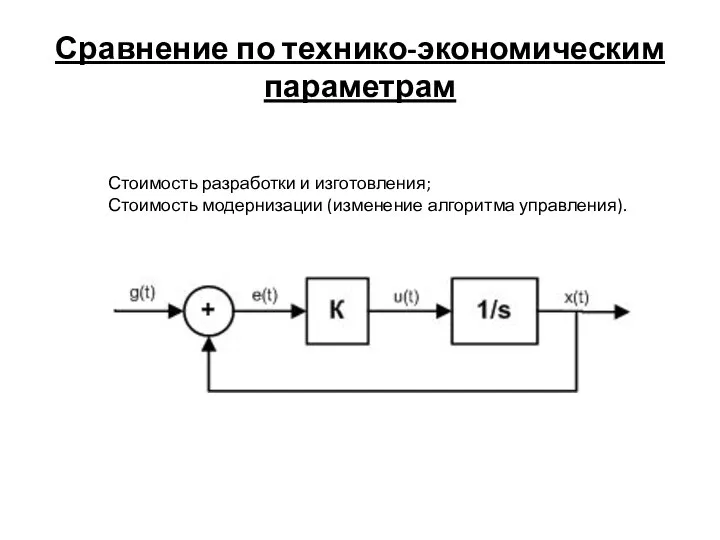
Сравнение по технико-экономическим параметрам
Стоимость разработки и изготовления;
Стоимость модернизации (изменение алгоритма
Сравнение по технико-экономическим параметрам
Стоимость разработки и изготовления;
Стоимость модернизации (изменение алгоритма
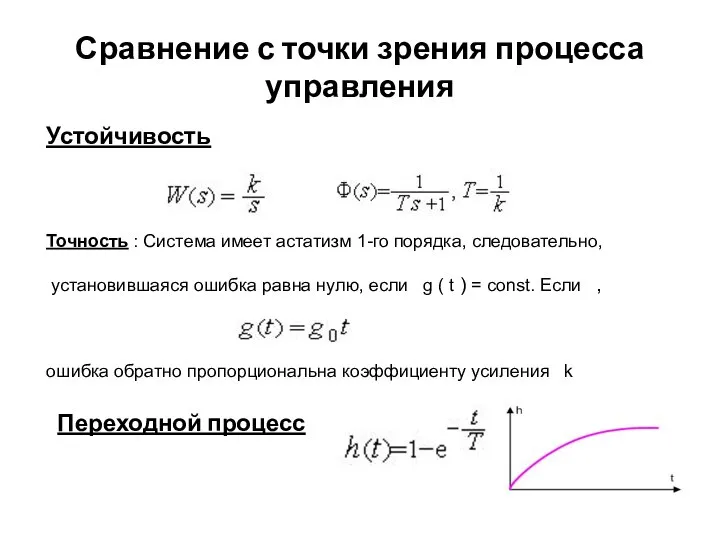
Сравнение с точки зрения процесса управления
Точность : Система имеет астатизм 1-го
Сравнение с точки зрения процесса управления
Точность : Система имеет астатизм 1-го
Перерегулирования нет, уменьшая постоянную времени Т мы можем добиться уменьшения времени
Перерегулирования нет, уменьшая постоянную времени Т мы можем добиться уменьшения времени
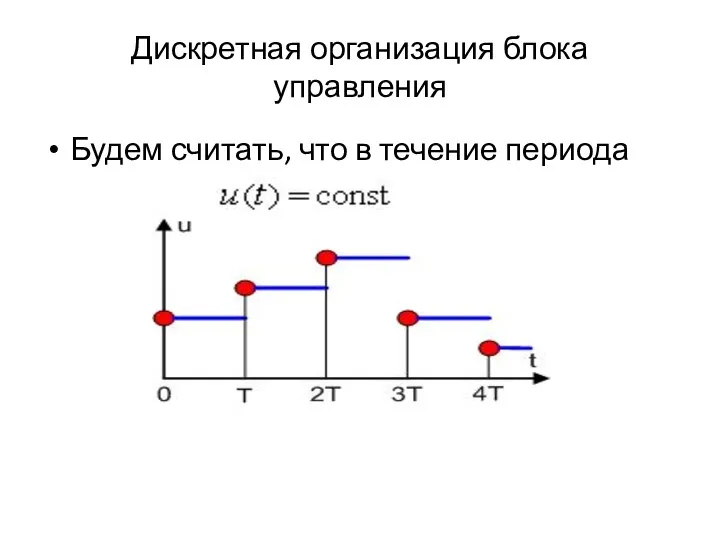
Дискретная организация блока управления
Будем считать, что в течение периода
Дискретная организация блока управления
Будем считать, что в течение периода
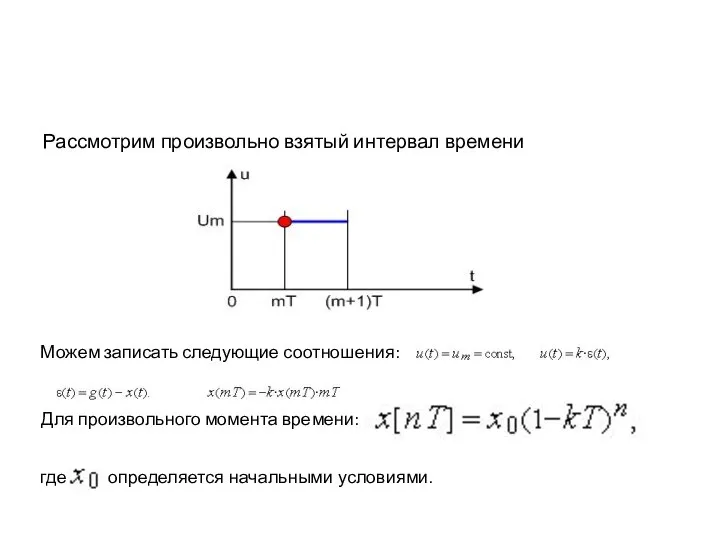
Рассмотрим произвольно взятый интервал времени
Можем записать следующие соотношения:
Для произвольного момента
Рассмотрим произвольно взятый интервал времени
Можем записать следующие соотношения:
Для произвольного момента
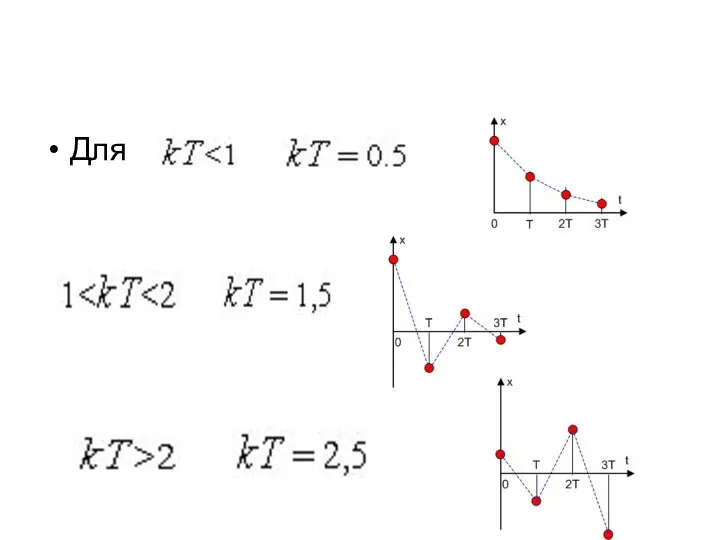
Для
,
Для
,
Таким образом, мы видим, что в цифровой системе устойчивость, точность и
Таким образом, мы видим, что в цифровой системе устойчивость, точность и
На основании этого можно сделать вывод, что при использовании линейных алгоритмов
На основании этого можно сделать вывод, что при использовании линейных алгоритмов
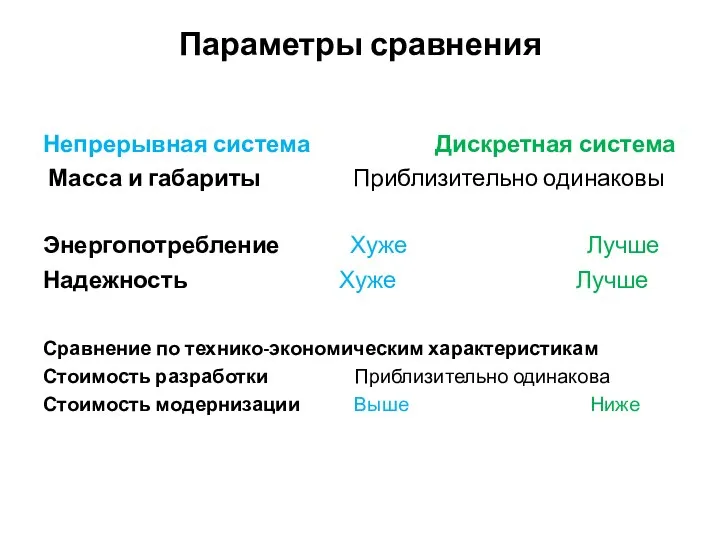
Параметры сравнения
Непрерывная система Дискретная система
Масса и габариты Приблизительно одинаковы
Энергопотребление
Параметры сравнения
Непрерывная система Дискретная система
Масса и габариты Приблизительно одинаковы
Энергопотребление
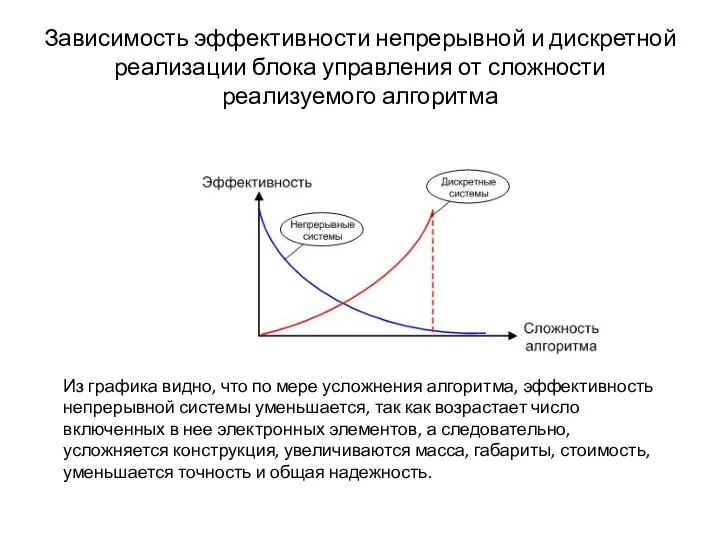
Зависимость эффективности непрерывной и дискретной реализации блока управления от сложности реализуемого
Зависимость эффективности непрерывной и дискретной реализации блока управления от сложности реализуемого
Выводы
Для дискретной системы усложнение алгоритма приводит лишь к изменению программы, что
Выводы
Для дискретной системы усложнение алгоритма приводит лишь к изменению программы, что
Вывод: Дискретная система управления имеет два основных преимущества по сравнению с
Вывод: Дискретная система управления имеет два основных преимущества по сравнению с

Лекция 3
Микропроцессорные системы управления
Структура. Требования. Типы МК.
Лекция 3
Микропроцессорные системы управления
Структура. Требования. Типы МК.
Структура типового микропроцессора
Архитектура типичной небольшой вычислительной системы на основе микроЭВМ показана
Структура типового микропроцессора
Архитектура типичной небольшой вычислительной системы на основе микроЭВМ показана
МП
Микропроцессор координирует работу всех устройств цифровой системы с помощью шины управления
МП
Микропроцессор координирует работу всех устройств цифровой системы с помощью шины управления
Управляющие блоки
низкая стоимость,
высокая надежность,
высокая степень миниатюризации,
малое энергопотребление,
работоспособность в жестких условиях эксплуатации;
достаточная
Управляющие блоки
низкая стоимость,
высокая надежность,
высокая степень миниатюризации,
малое энергопотребление,
работоспособность в жестких условиях эксплуатации;
достаточная
Классификация микропроцессорных систем
Архитектура микропроцессора
Микроархитектура микропроцессора - это аппаратная организация и
Классификация микропроцессорных систем
Архитектура микропроцессора
Микроархитектура микропроцессора - это аппаратная организация и
ПЗУ
Постоянное запоминающее устройство (ПЗУ) в микроЭ ВМ содержит некоторую программу (на
ПЗУ
Постоянное запоминающее устройство (ПЗУ) в микроЭ ВМ содержит некоторую программу (на
В настоящее время выпускается целый ряд типов МК. Все эти приборы
В настоящее время выпускается целый ряд типов МК. Все эти приборы

Логическая структура микропроцессора
Логическая структура микропроцессора, т. е. конфигурация составляющих микропроцессор логических
Логическая структура микропроцессора
Логическая структура микропроцессора, т. е. конфигурация составляющих микропроцессор логических
Типы МК
модульная организация, при которой на базе одного процессорного ядра (центрального
Типы МК
модульная организация, при которой на базе одного процессорного ядра (центрального
Типы МК
Процессорное ядро включает в себя:
центральный процессор;
внутреннюю контроллерную магистраль (ВКМ)
Типы МК
Процессорное ядро включает в себя:
центральный процессор;
внутреннюю контроллерную магистраль (ВКМ)
Основными характеристиками, определяющими производительность процессорного ядра МК, являются:
набор регистров для
Основными характеристиками, определяющими производительность процессорного ядра МК, являются:
набор регистров для
В МПС микропроцессор выполняет следующие функции:
- выборку команд программы из
В МПС микропроцессор выполняет следующие функции: - выборку команд программы из

Архитектура
CISC-процессоры выполняют большой набор команд с развитыми возможностями адресации, давая разработчику
Архитектура
CISC-процессоры выполняют большой набор команд с развитыми возможностями адресации, давая разработчику
Аритектура
В процессорах с RISC-архитектурой набор исполняемых команд сокращен до минимума. Для
Аритектура
В процессорах с RISC-архитектурой набор исполняемых команд сокращен до минимума. Для
Архитектура
Основное преимущество архитектуры Фон-Неймана – упрощение устройства МПС, так как
Архитектура
Основное преимущество архитектуры Фон-Неймана – упрощение устройства МПС, так как
Архитектура
Гарвардская архитектура почти не использовалась до конца 70-х годов, пока производители
Архитектура
Гарвардская архитектура почти не использовалась до конца 70-х годов, пока производители
Архитектура
По опыту использования МПС для управления различными объектами, для реализации
Архитектура
По опыту использования МПС для управления различными объектами, для реализации
Архитектура
Большинство производителей современных 8-разрядных МК используют гарвардскую архитектуру. Однако гарвардская архитектура
Архитектура
Большинство производителей современных 8-разрядных МК используют гарвардскую архитектуру. Однако гарвардская архитектура
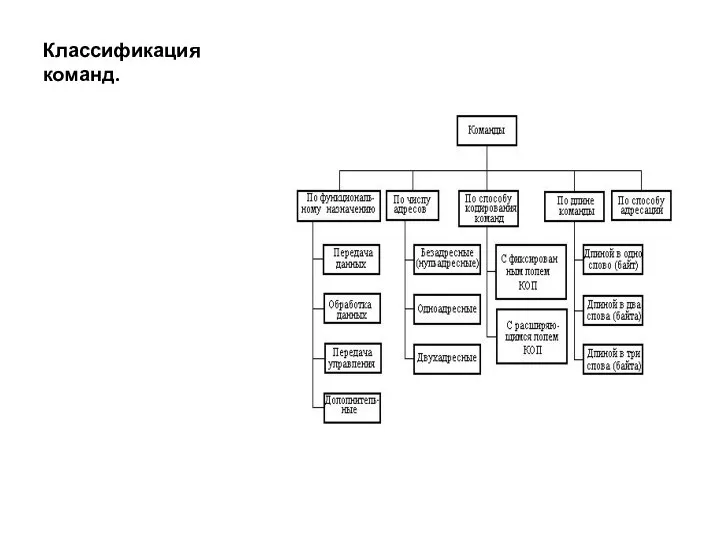
Классификация команд.
Классификация команд.
Типы архитектур
Определяя в качестве основной характеристики МП разрядность, выделяют следующие
Типы архитектур
Определяя в качестве основной характеристики МП разрядность, выделяют следующие

Принципиальная электрическая схема модуля MCU42-3.
Принципиальная электрическая схема модуля MCU42-3.

Принципиальная электрическая схема модуля OUT1-X.
Принципиальная электрическая схема модуля OUT1-X.
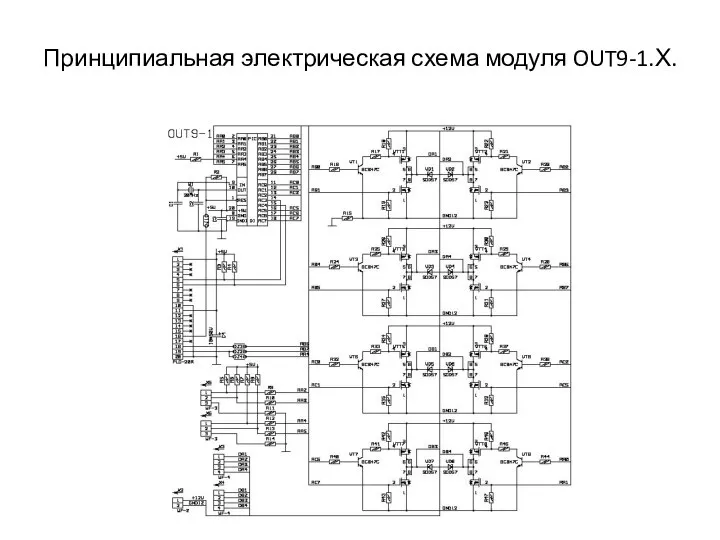
Принципиальная электрическая схема модуля OUT9-1.Х.
Принципиальная электрическая схема модуля OUT9-1.Х.
Лекция 4
Современные микроконтроллеры
Лекция 4
Современные микроконтроллеры
Знакомство с АРМ
В состав МК входят следующие периферийные устройства:
43 линии ввода-вывода
Знакомство с АРМ
В состав МК входят следующие периферийные устройства:
43 линии ввода-вывода

Отладочная плата 1986EvBrd_64
Отладочная плата 1986EvBrd_64, выпускаемая фирмой «Миландр», предназначена для
ознакомления с
Отладочная плата 1986EvBrd_64
Отладочная плата 1986EvBrd_64, выпускаемая фирмой «Миландр», предназначена для
ознакомления с

Программатор
Для загрузки программ, написанных с помощью персонального компьютера, во Flash-память МК,
Программатор
Для загрузки программ, написанных с помощью персонального компьютера, во Flash-память МК,
Отображение информации
Среда программирования Keil μVision
Интегрированная среда программирования Keil μVision MDK-ARM предназначена
Отображение информации
Среда программирования Keil μVision
Интегрированная среда программирования Keil μVision MDK-ARM предназначена
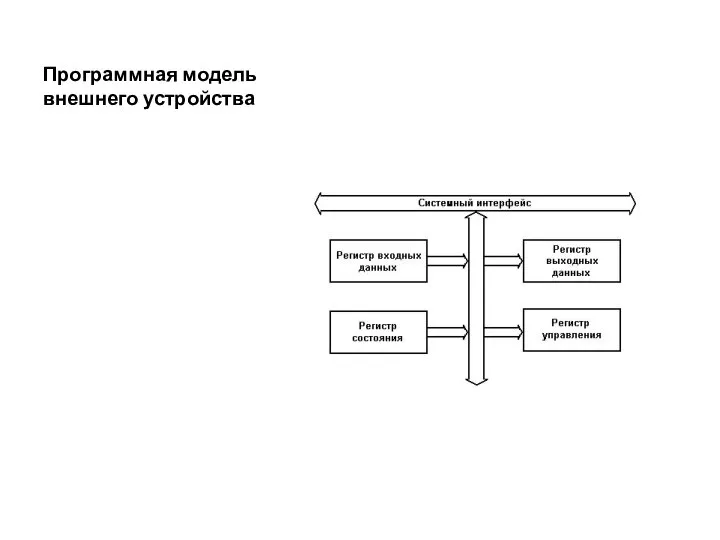
Программная модель внешнего устройства
Программная модель внешнего устройства
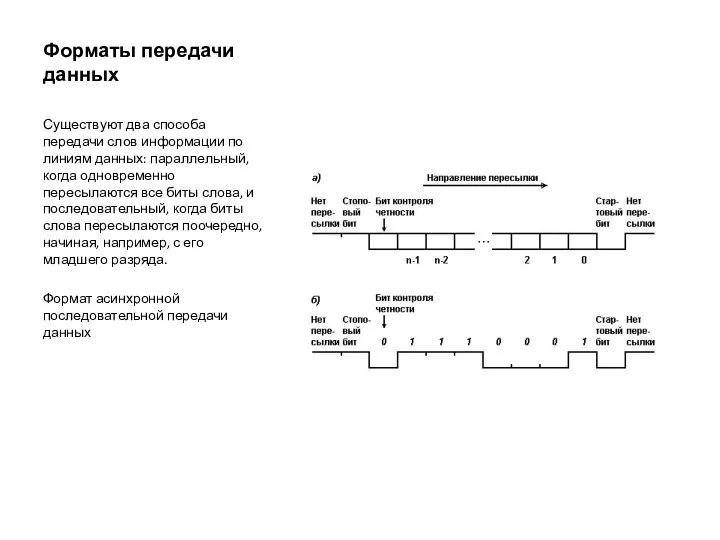
Форматы передачи данных
Существуют два способа передачи слов информации по линиям данных:
Форматы передачи данных
Существуют два способа передачи слов информации по линиям данных:
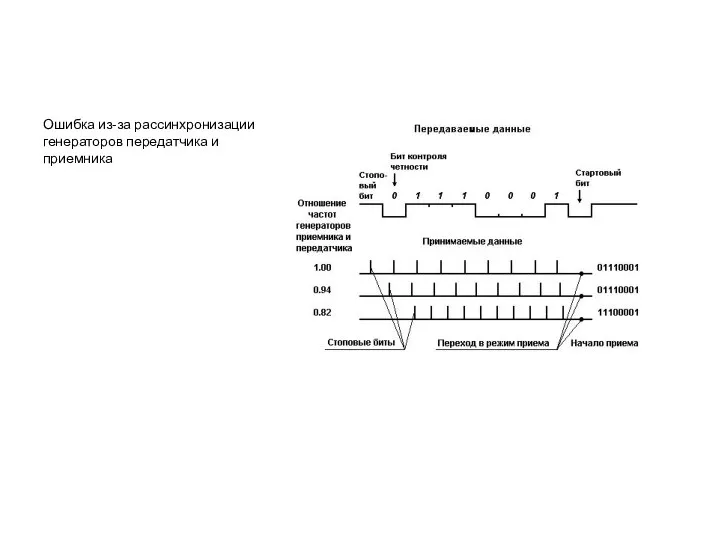
Ошибка из-за рассинхронизации генераторов передатчика и приемника
Ошибка из-за рассинхронизации генераторов передатчика и приемника
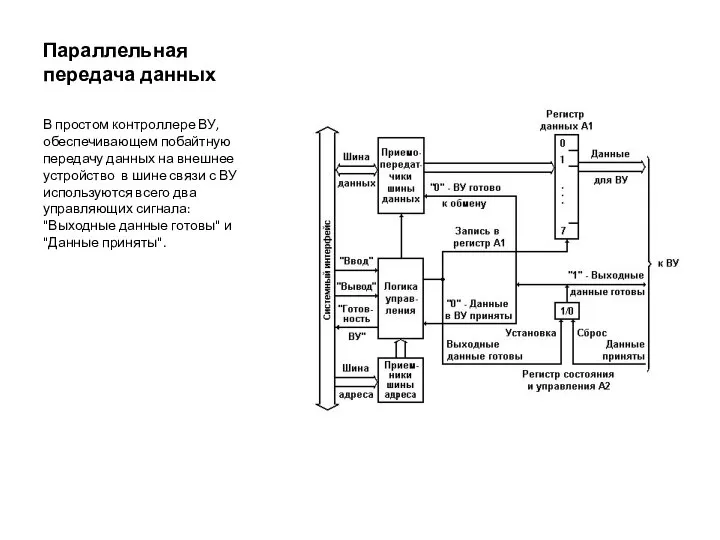
Параллельная передача данных
В простом контроллере ВУ, обеспечивающем побайтную передачу данных на
Параллельная передача данных
В простом контроллере ВУ, обеспечивающем побайтную передачу данных на
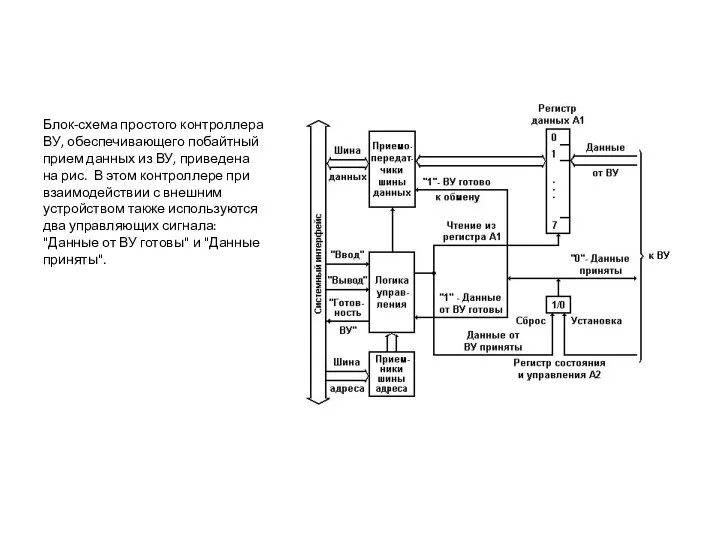
Блок-схема простого контроллера ВУ, обеспечивающего побайтный прием данных из ВУ, приведена
Блок-схема простого контроллера ВУ, обеспечивающего побайтный прием данных из ВУ, приведена
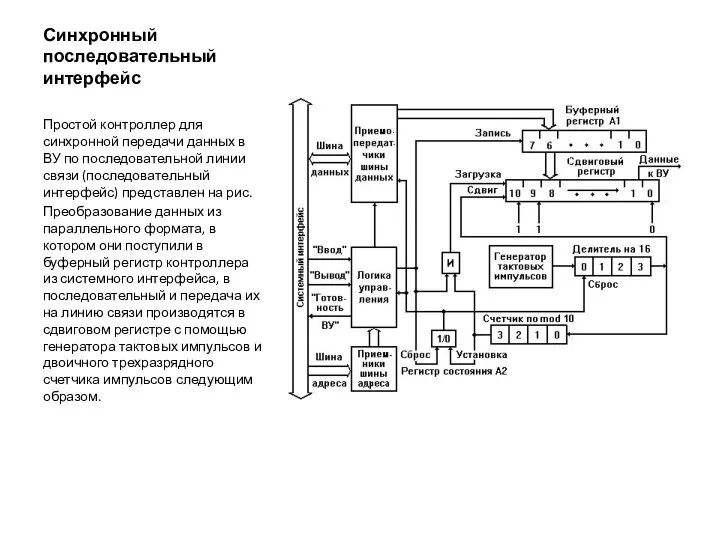
Синхронный последовательный интерфейс
Простой контроллер для синхронной передачи данных в ВУ по
Синхронный последовательный интерфейс
Простой контроллер для синхронной передачи данных в ВУ по

Асинхронный последовательный интерфейс
Организация асинхронного последовательного обмена данными с внешним устройством осложняется
Асинхронный последовательный интерфейс
Организация асинхронного последовательного обмена данными с внешним устройством осложняется

Контроллер последовательного асинхронного приема
Уровень логической единицы поступает по линии "Данные"
Контроллер последовательного асинхронного приема
Уровень логической единицы поступает по линии "Данные"
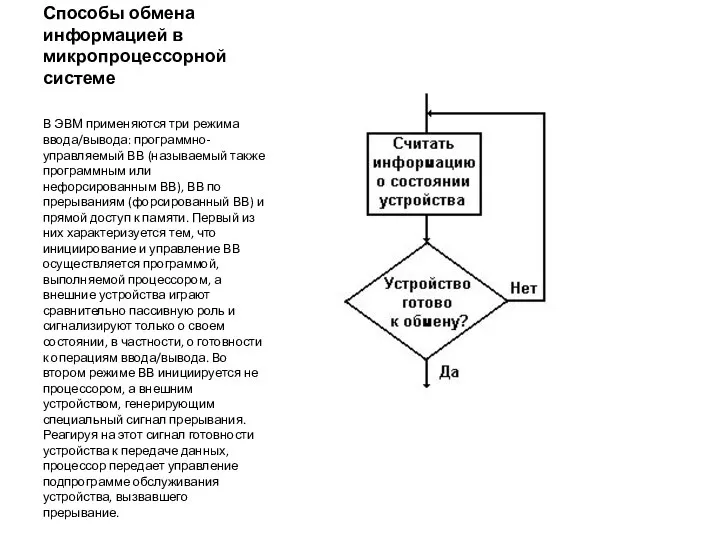
Способы обмена информацией в микропроцессорной системе
В ЭВМ применяются три режима ввода/вывода:
Способы обмена информацией в микропроцессорной системе
В ЭВМ применяются три режима ввода/вывода:
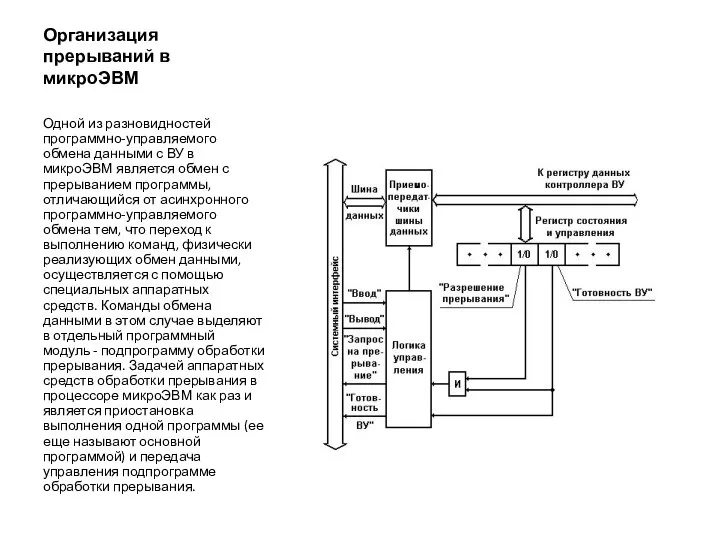
Организация прерываний в микроЭВМ
Одной из разновидностей программно-управляемого обмена данными с ВУ
Организация прерываний в микроЭВМ
Одной из разновидностей программно-управляемого обмена данными с ВУ
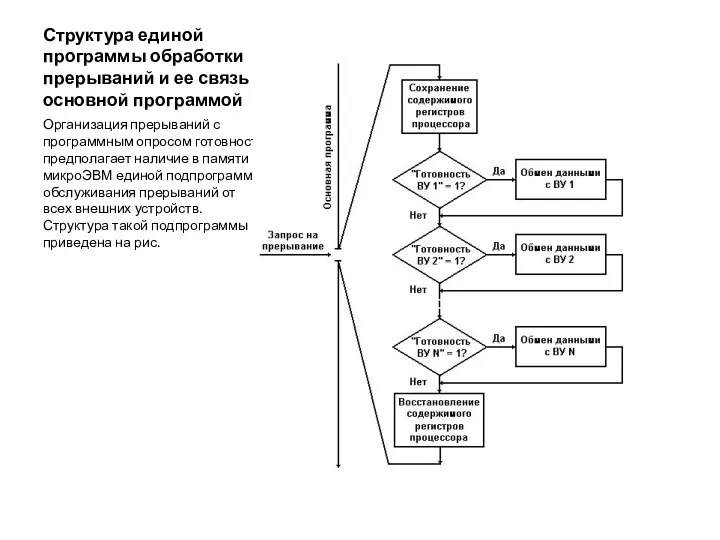
Структура единой программы обработки прерываний и ее связь с основной программой
Структура единой программы обработки прерываний и ее связь с основной программой
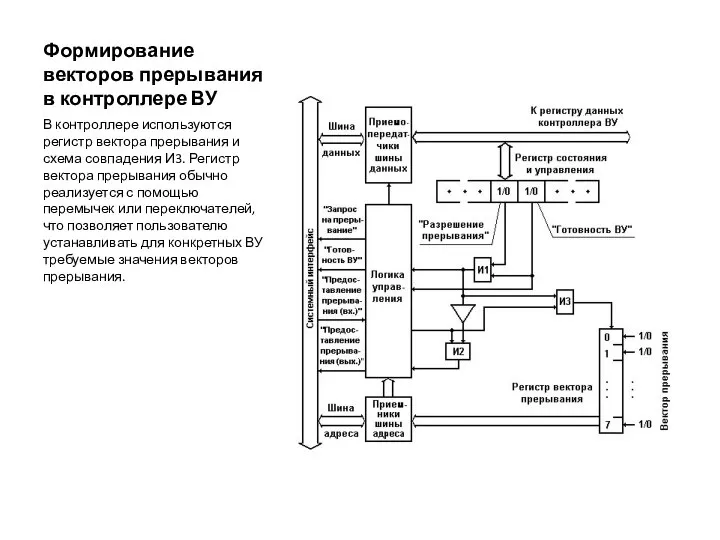
Формирование векторов прерывания в контроллере ВУ
В контроллере используются регистр вектора
Формирование векторов прерывания в контроллере ВУ
В контроллере используются регистр вектора
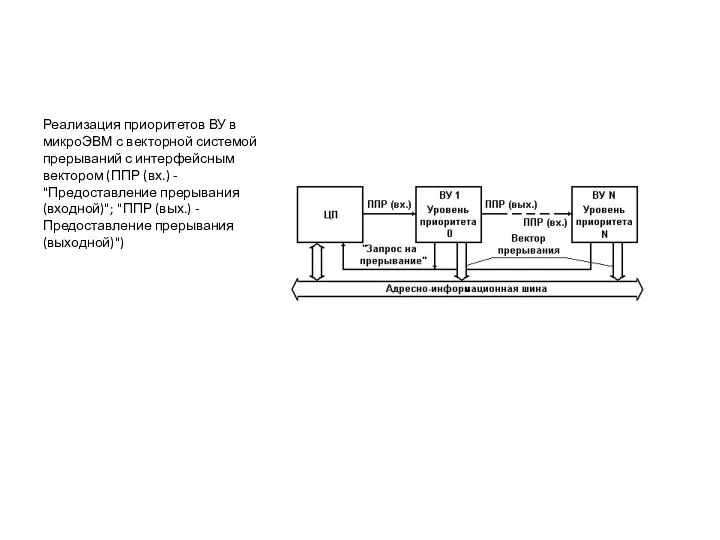
Реализация приоритетов ВУ в микроЭВМ с векторной системой прерываний с интерфейсным
Реализация приоритетов ВУ в микроЭВМ с векторной системой прерываний с интерфейсным

Организация прямого доступа к памяти
Одним из способов обмена данными с ВУ
Организация прямого доступа к памяти
Одним из способов обмена данными с ВУ
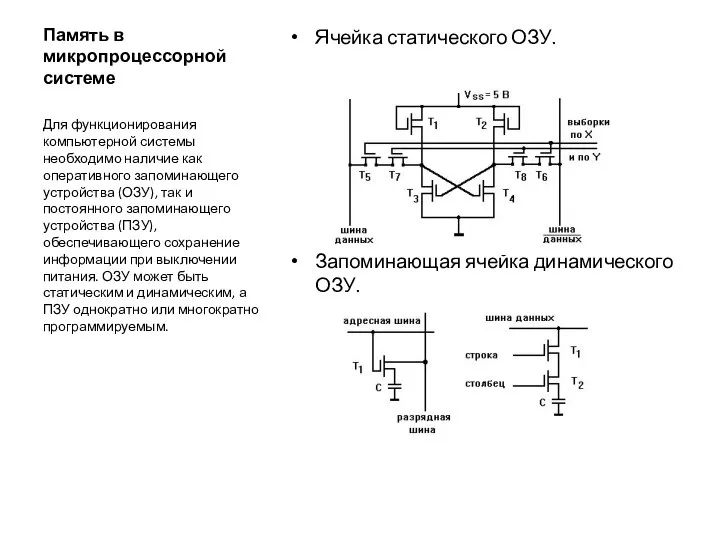
Память в микропроцессорной системе
Ячейка статического ОЗУ.
Запоминающая ячейка динамического ОЗУ.
Для
Память в микропроцессорной системе
Ячейка статического ОЗУ.
Запоминающая ячейка динамического ОЗУ.
Для
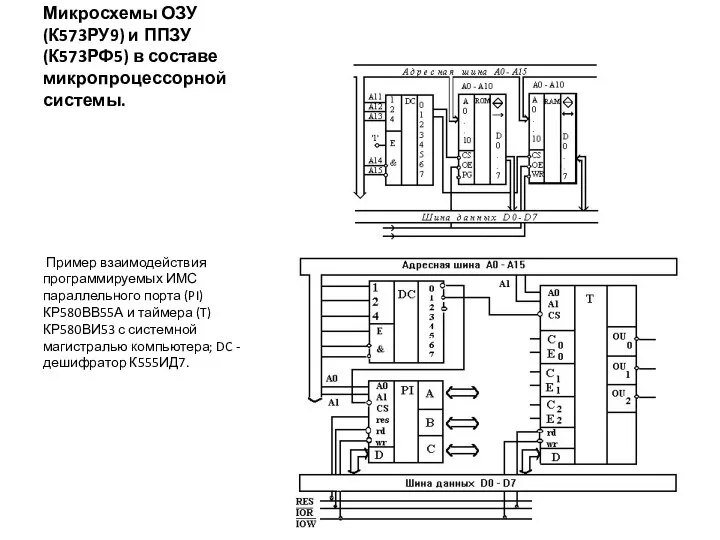
Микросхемы ОЗУ (К573РУ9) и ППЗУ (К573РФ5) в составе микропроцессорной системы.
Пример
Микросхемы ОЗУ (К573РУ9) и ППЗУ (К573РФ5) в составе микропроцессорной системы.
Пример
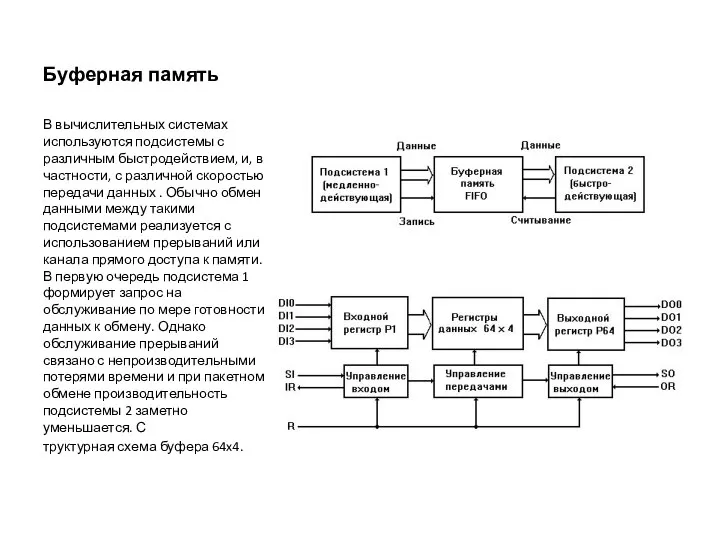
Буферная память
В вычислительных системах используются подсистемы с различным быстродействием, и, в
Буферная память
В вычислительных системах используются подсистемы с различным быстродействием, и, в
Стековая память
Перемещение данных при записи и считывании информации в стековой
Стековая память
Перемещение данных при записи и считывании информации в стековой
Современные микроконтроллеры
8-разрядный AVR-микроконтроллер с внутрисистемной программируемой флэш-памятью емкостью 128 кбайт ATmega128,
Современные микроконтроллеры
8-разрядный AVR-микроконтроллер с внутрисистемной программируемой флэш-памятью емкостью 128 кбайт ATmega128,
МК
Гарантированная двухоперационность: возможность чтения во время записи
– Износостойкость 4 кбайт
МК
Гарантированная двухоперационность: возможность чтения во время записи
– Износостойкость 4 кбайт
МК
8 несимметричных каналов
7 дифференциальных каналов
2 дифференциальных канала с выборочным усилением из
МК
8 несимметричных каналов 7 дифференциальных каналов 2 дифференциальных канала с выборочным усилением из
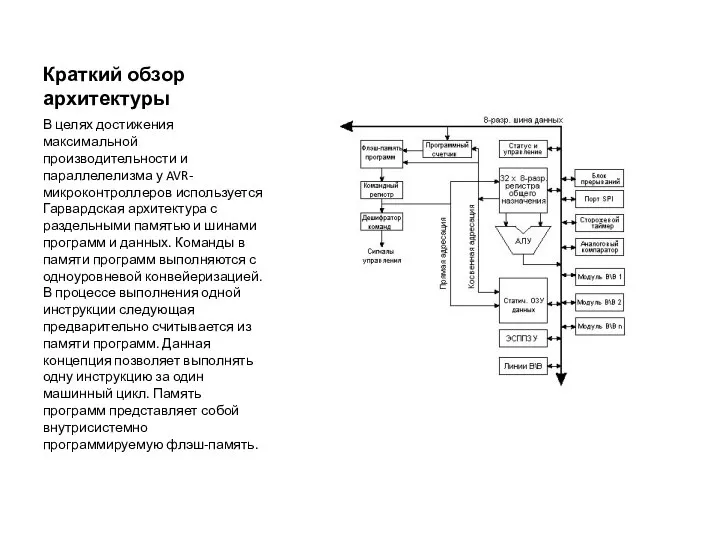
Краткий обзор архитектуры
В целях достижения максимальной производительности и параллелелизма у
Краткий обзор архитектуры
В целях достижения максимальной производительности и параллелелизма у
АЛУ – арифметико-логическое устройство
Высокопроизводительное АЛУ AVR-микроконтроллеров работает в непосредственной связи
АЛУ – арифметико-логическое устройство
Высокопроизводительное АЛУ AVR-микроконтроллеров работает в непосредственной связи
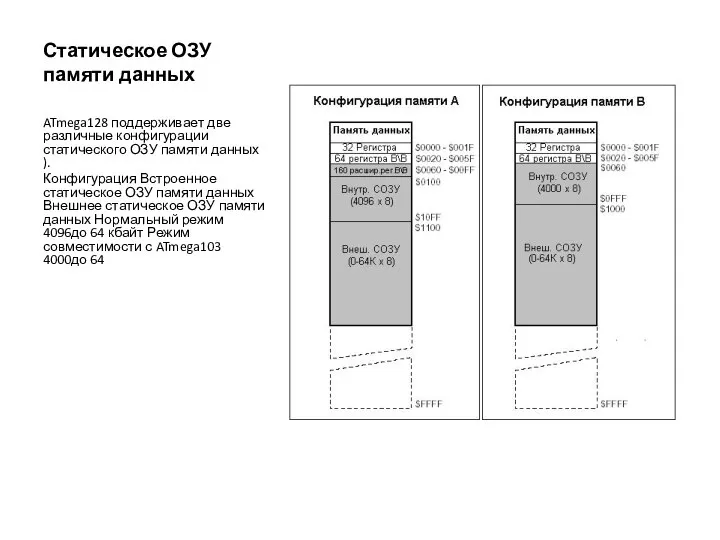
Статическое ОЗУ памяти данных
ATmega128 поддерживает две различные конфигурации статического ОЗУ памяти
Статическое ОЗУ памяти данных
ATmega128 поддерживает две различные конфигурации статического ОЗУ памяти
Адресация
32 рабочих регистров общего назначения, 64 регистра ввода-вывода и 4096 байт
Адресация
32 рабочих регистров общего назначения, 64 регистра ввода-вывода и 4096 байт
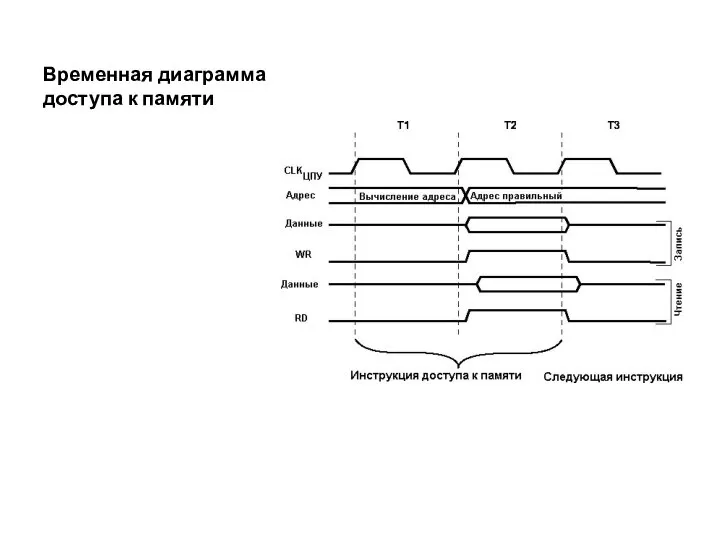
Временная диаграмма доступа к памяти
Временная диаграмма доступа к памяти
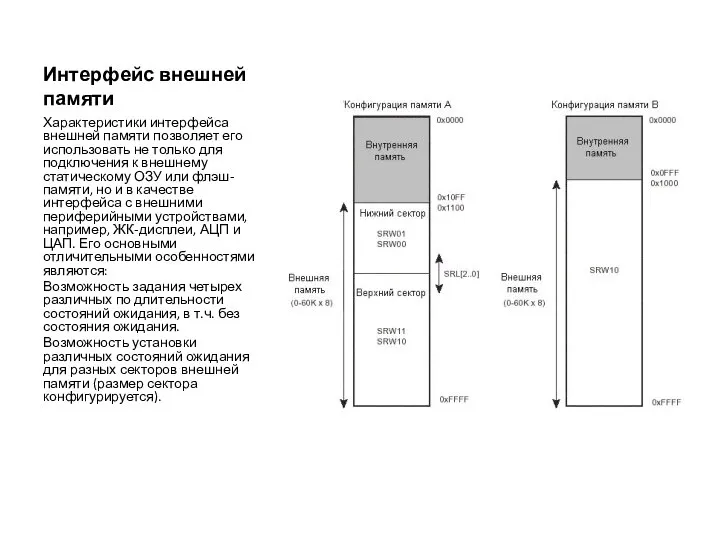
Интерфейс внешней памяти
Характеристики интерфейса внешней памяти позволяет его использовать не только
Интерфейс внешней памяти
Характеристики интерфейса внешней памяти позволяет его использовать не только
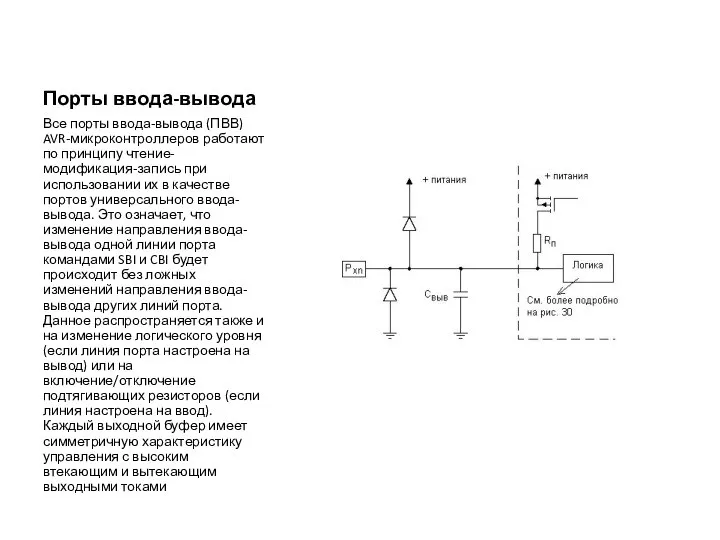
Порты ввода-вывода
Все порты ввода-вывода (ПВВ) AVR-микроконтроллеров работают по принципу чтение-модификация-запись при
Порты ввода-вывода
Все порты ввода-вывода (ПВВ) AVR-микроконтроллеров работают по принципу чтение-модификация-запись при

Организация универсального цифрового ввода-вывода
Для каждого порта ввода-вывода в памяти ввода-вывода зарезервировано
Организация универсального цифрового ввода-вывода
Для каждого порта ввода-вывода в памяти ввода-вывода зарезервировано
Лекция 5
Функциональные узлы МК.
Устройства аналогового ввода –вывода.
Лекция 5
Функциональные узлы МК.
Устройства аналогового ввода –вывода.
Аналогово-цифровой преобразователь
Отличительные особенности:
10-разрядное разрешение
Интегральная нелинейность 0.5 мл. разр.
Абсолютная
Аналогово-цифровой преобразователь
Отличительные особенности:
10-разрядное разрешение
Интегральная нелинейность 0.5 мл. разр.
Абсолютная
АЦП
АЦП имеет отдельный вывод питания AVCC (аналоговое питание). AVCC не должен
АЦП
АЦП имеет отдельный вывод питания AVCC (аналоговое питание). AVCC не должен
Принцип действия АЦП
АЦП преобразовывает входное аналоговое напряжение в 10-разр. код методом
Принцип действия АЦП
АЦП преобразовывает входное аналоговое напряжение в 10-разр. код методом
Временная диаграмма работы АЦП в режиме одиночного преобразования
Если выбран дифференциальный
Временная диаграмма работы АЦП в режиме одиночного преобразования
Если выбран дифференциальный
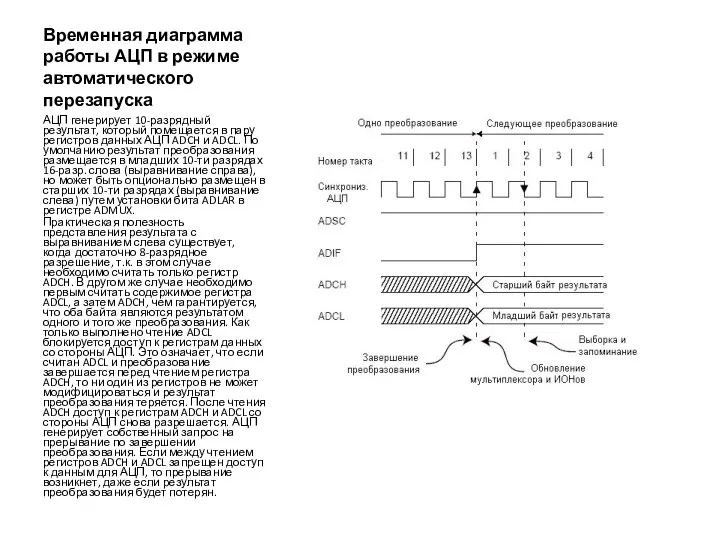
Временная диаграмма работы АЦП в режиме автоматического перезапуска
АЦП генерирует 10-разрядный результат,
Временная диаграмма работы АЦП в режиме автоматического перезапуска
АЦП генерирует 10-разрядный результат,
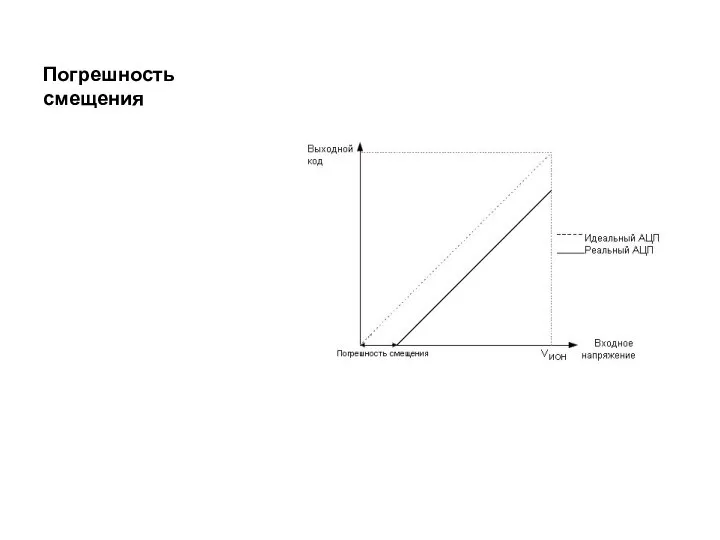
Погрешность смещения
Погрешность смещения
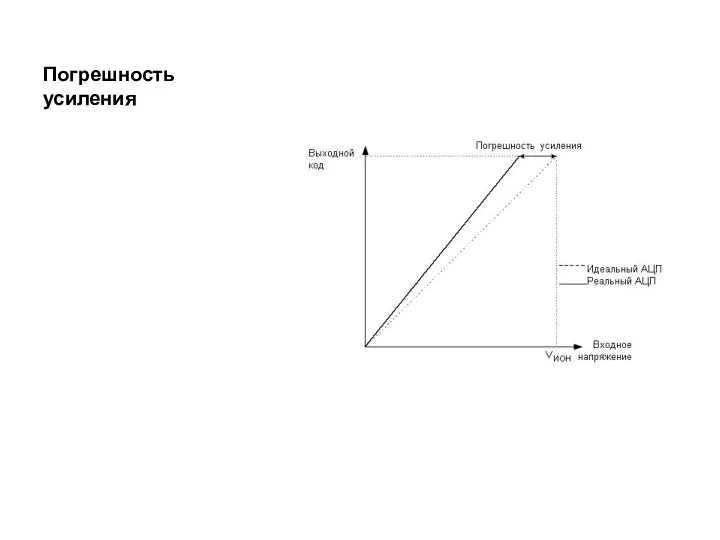
Погрешность усиления
Погрешность усиления
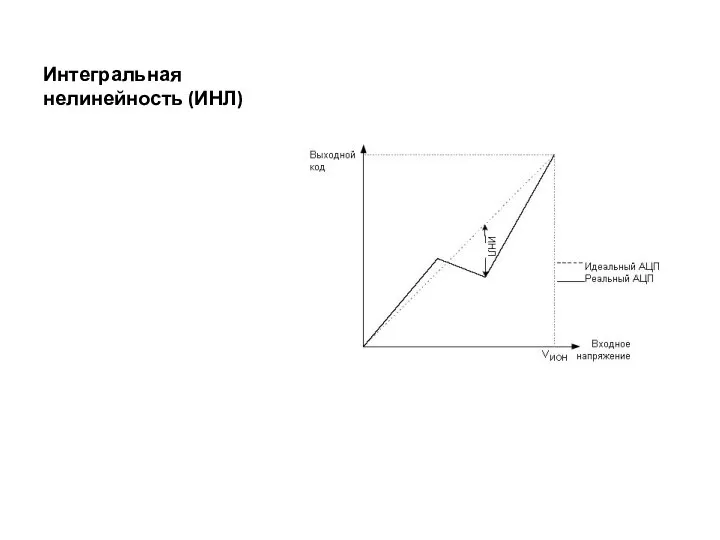
Интегральная нелинейность (ИНЛ)
Интегральная нелинейность (ИНЛ)
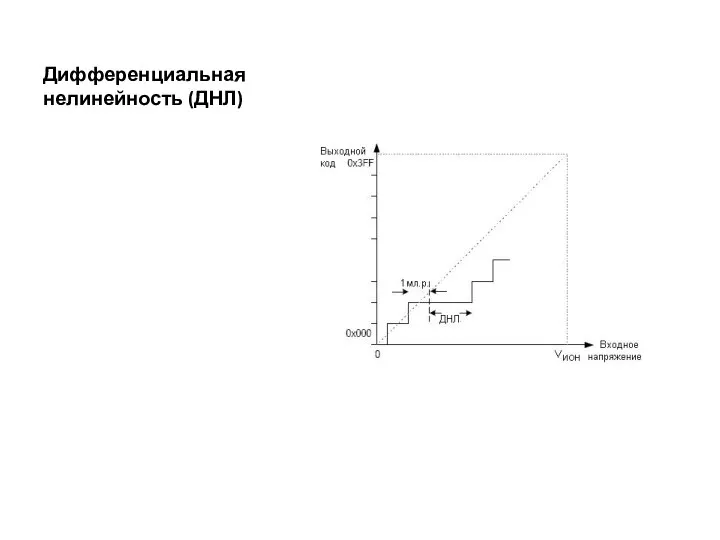
Дифференциальная нелинейность (ДНЛ)
Дифференциальная нелинейность (ДНЛ)
Определение погрешности
Для однополярного и дифференциального преобразования
Определение погрешности
Для однополярного и дифференциального преобразования
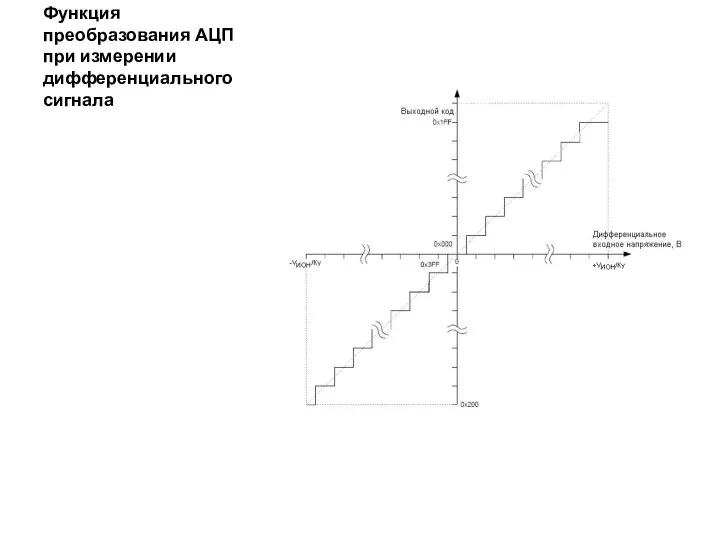
Функция преобразования АЦП при измерении дифференциального сигнала
Функция преобразования АЦП при измерении дифференциального сигнала
Внешние прерывания
Внешние прерывания осуществляются через выводы INT7:0. Обратите внимание, что после
Внешние прерывания
Внешние прерывания осуществляются через выводы INT7:0. Обратите внимание, что после
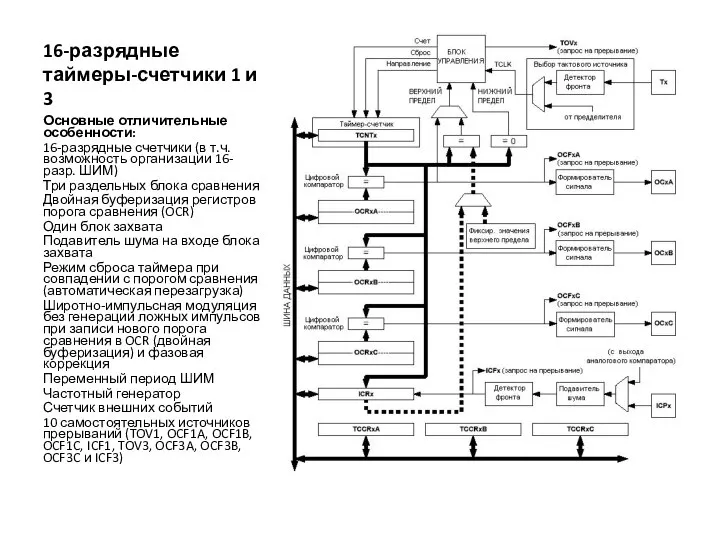
16-разрядные таймеры-счетчики 1 и 3
Основные отличительные особенности:
16-разрядные счетчики (в т.ч.
16-разрядные таймеры-счетчики 1 и 3
Основные отличительные особенности:
16-разрядные счетчики (в т.ч.
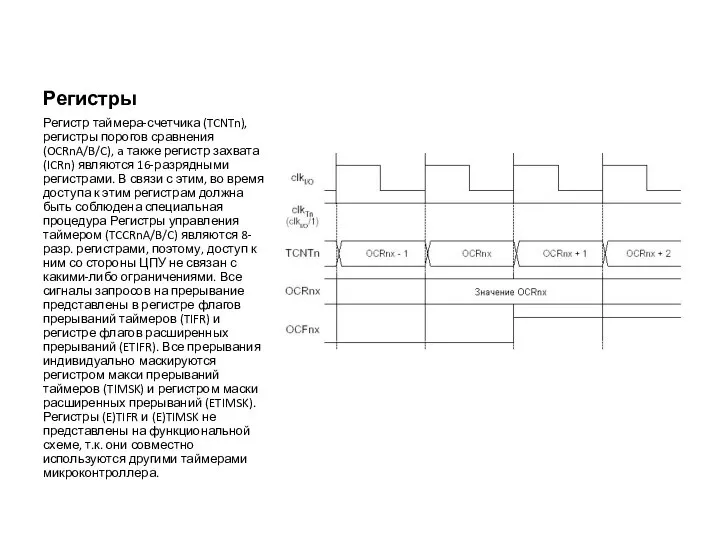
Регистры
Регистр таймера-счетчика (TCNTn), регистры порогов сравнения (OCRnA/B/C), a также регистр захвата
Регистры
Регистр таймера-счетчика (TCNTn), регистры порогов сравнения (OCRnA/B/C), a также регистр захвата
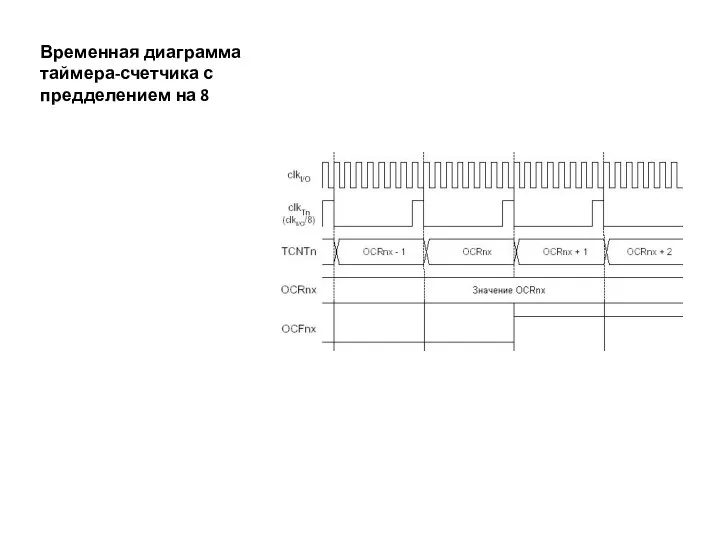
Временная диаграмма таймера-счетчика с предделением на 8
Временная диаграмма таймера-счетчика с предделением на 8
Лекция 6
ПРОЕКТИРОВАНИЕ МИКРОПРОЦЕССОРНЫХ СИСТЕМ.
УРОВНИ ПРЕДСТАВЛЕНИЯ МИКРОПРОЦЕССОРНОЙ СИСТЕМЫ
Лекция 6
ПРОЕКТИРОВАНИЕ МИКРОПРОЦЕССОРНЫХ СИСТЕМ.
УРОВНИ ПРЕДСТАВЛЕНИЯ МИКРОПРОЦЕССОРНОЙ СИСТЕМЫ
ПРОЕКТИРОВАНИЕ МИКРОПРОЦЕССОРНЫХ СИСТЕМ
УРОВНИ ПРЕДСТАВЛЕНИЯ МИКРОПРОЦЕССОРНОЙ СИСТЕМЫ
Микропроцессорная система может быть описана, например,
ПРОЕКТИРОВАНИЕ МИКРОПРОЦЕССОРНЫХ СИСТЕМ
УРОВНИ ПРЕДСТАВЛЕНИЯ МИКРОПРОЦЕССОРНОЙ СИСТЕМЫ
Микропроцессорная система может быть описана, например,
Отладка
О правильности функционирования микропроцессорной системы на уровне "черного ящика" с полностью
Отладка
О правильности функционирования микропроцессорной системы на уровне "черного ящика" с полностью
Диагностика неисправности
Точность, с которой тот или иной тест локализует неисправности, называется
Диагностика неисправности
Точность, с которой тот или иной тест локализует неисправности, называется
Функции средств отладки
Средства отладки должны:
1) управлять поведением системы или/и ее
Функции средств отладки
Средства отладки должны: 1) управлять поведением системы или/и ее
Этапы проектирования микропроцессорных систем
При проектировании многопроцессорных микропроцессорных систем, содержащих несколько типов
Этапы проектирования микропроцессорных систем
При проектировании многопроцессорных микропроцессорных систем, содержащих несколько типов
Технология разработки микропроцессорных контроллеров
В качестве основного метода разработки микропроцессорных систем фирмой
Технология разработки микропроцессорных контроллеров
В качестве основного метода разработки микропроцессорных систем фирмой
Технология МК
В настоящее время средства моделирования в схемных эмуляторах, которые мы
Технология МК
В настоящее время средства моделирования в схемных эмуляторах, которые мы
Технология МК
Требования начинают цикл проектирования микропроцессорного контроллера. Особенностью именно микропроцессорных контроллеров
Технология МК
Требования начинают цикл проектирования микропроцессорного контроллера. Особенностью именно микропроцессорных контроллеров
Технология МК
Критерием выбора является максимальное увеличение программы и уменьшение аппаратуры при
Технология МК
Критерием выбора является максимальное увеличение программы и уменьшение аппаратуры при
Технология МК
На этапе разработки структуры микропроцессорного контроллера окончательно определяется состав имеющихся
Технология МК
На этапе разработки структуры микропроцессорного контроллера окончательно определяется состав имеющихся
Квазипараллельные процессы в микропроцессорных системах управления
Часть типовых операций управления, необходимых для
Квазипараллельные процессы в микропроцессорных системах управления
Часть типовых операций управления, необходимых для
Лекция7
Персональные компьютеры и программируемые логические контроллеры в системах управления
Лекция7
Персональные компьютеры и программируемые логические контроллеры в системах управления

История развития средств автоматизации
С развитием средств автоматизации возникают новые требования к
История развития средств автоматизации
С развитием средств автоматизации возникают новые требования к
Первыми средствами автоматизации, которые исполняли логические операции, связанные с управлением были
Первыми средствами автоматизации, которые исполняли логические операции, связанные с управлением были
ПК или ПЛК
Персональные компьютеры класса PC всегда служили для построения высших
ПК или ПЛК
Персональные компьютеры класса PC всегда служили для построения высших
Со временем персональные компьютеры получили возможность реализации управляющих функций в
Со временем персональные компьютеры получили возможность реализации управляющих функций в
С другой стороны, на рынке появились программируемые контроллеры со встроенными
С другой стороны, на рынке появились программируемые контроллеры со встроенными
Метод работы системы управления очень важен. А также то, каким образом
Метод работы системы управления очень важен. А также то, каким образом
Персональные компьютеры с запущенным ядром реального времени или операционной системой
Персональные компьютеры с запущенным ядром реального времени или операционной системой
Выполнение задач управления в реальном времени означает, что их выполнение
Выполнение задач управления в реальном времени означает, что их выполнение
Благодаря всему этому персональный компьютер становится более прочным, его устойчивость
Благодаря всему этому персональный компьютер становится более прочным, его устойчивость
С точки зрения пользователя очень важно, чтобы стоимость сервисного обслуживания системы
С точки зрения пользователя очень важно, чтобы стоимость сервисного обслуживания системы
Дополнительным пунктом является минимизация трудозатрат на выполнение сервисного обслуживания и
Дополнительным пунктом является минимизация трудозатрат на выполнение сервисного обслуживания и
Интеграция аппаратных компонентов
Сейчас инженеры обращают внимание на диапазон выбора опций в
Интеграция аппаратных компонентов
Сейчас инженеры обращают внимание на диапазон выбора опций в
Интерфейс оператора является обязательным элементом большинства приложений для систем управления.
Интерфейс оператора является обязательным элементом большинства приложений для систем управления.
Безопасность приложений
Ранее вопрос безопасности системы файлов, a тем самым приложения и
Безопасность приложений
Ранее вопрос безопасности системы файлов, a тем самым приложения и
Отсутствует антивирусное программное обеспечение для программируемых контроллеров, которое бы их защищало.
Отсутствует антивирусное программное обеспечение для программируемых контроллеров, которое бы их защищало.
Программируемые контроллеры давно используются в автоматизации машин. Помимо обмена данными
Программируемые контроллеры давно используются в автоматизации машин. Помимо обмена данными
Главным различием между программируемыми контроллерами и компьютерами PC является способ
Главным различием между программируемыми контроллерами и компьютерами PC является способ
Современные системы управления, как основанные на ПЛК, так и на PC,
Современные системы управления, как основанные на ПЛК, так и на PC,
Различия в способе выполнения задач требуют разного подхода к созданию приложений
Различия в способе выполнения задач требуют разного подхода к созданию приложений
Для персональных компьютеров типичными языками программирования являются C/C++/.net.
Примечание редакции: Компьютерные
Для персональных компьютеров типичными языками программирования являются C/C++/.net.
Примечание редакции: Компьютерные
Стоимость решения
Выбор платформы системы управления должен зависеть от разрабатываемого приложения. В
Стоимость решения
Выбор платформы системы управления должен зависеть от разрабатываемого приложения. В
Если система управления требует сложных вычислений, обслуживания крупной сети исполнительных устройств
Если система управления требует сложных вычислений, обслуживания крупной сети исполнительных устройств
Возможности расширения системы управления зависят о того, можно ли добавлять
Возможности расширения системы управления зависят о того, можно ли добавлять
Программируемые контроллеры с самого начала проектировались для работы в сложных
Программируемые контроллеры с самого начала проектировались для работы в сложных
Многие инженеры знают языки программирования программируемых контроллеров, описанные в стандарте
Многие инженеры знают языки программирования программируемых контроллеров, описанные в стандарте
В настоящее время на рынке появилось много инструментов, благодаря которым научные
В настоящее время на рынке появилось много инструментов, благодаря которым научные
Лекция 8
PC или ПЛК: Сравнение опций управления
Лекция 8
PC или ПЛК: Сравнение опций управления
PC или ПЛК: Сравнение опций управления
Проблема выбора между программируемым логическим контроллером
PC или ПЛК: Сравнение опций управления
Проблема выбора между программируемым логическим контроллером
Одним из ключевых решений, принимаемых обычно на начальной стадии проектирования
Одним из ключевых решений, принимаемых обычно на начальной стадии проектирования
Количество решений для систем управления с использованием компьютерных технологий постоянно
Количество решений для систем управления с использованием компьютерных технологий постоянно
Программируемые контроллеры первоначально являлись более удобной, гибкой и надежной альтернативой
Программируемые контроллеры первоначально являлись более удобной, гибкой и надежной альтернативой
Со временем обычные программируемые контроллеры эволюционировали в направлении более гибких
Со временем обычные программируемые контроллеры эволюционировали в направлении более гибких
Любая машина, способная автоматически выполнять некоторые операции, имеет в своем составе
Любая машина, способная автоматически выполнять некоторые операции, имеет в своем составе
Несомненно, появление первых ПЛК сделало прорыв в сфере автоматизации и послужило
Несомненно, появление первых ПЛК сделало прорыв в сфере автоматизации и послужило
В современных ПЛК широко используются аналоговые входы и выходы. Аналоговый или
В современных ПЛК широко используются аналоговые входы и выходы. Аналоговый или
Физическое представление ПЛК.
Физически, типичный ПЛК представляет собой блок, имеющий определенный набор
Физическое представление ПЛК.
Физически, типичный ПЛК представляет собой блок, имеющий определенный набор

Программируемый логический контроллер Шнайдер Электрик Modicon M340.
Программируемый логический контроллер Шнайдер Электрик Modicon M340.
Для классификации огромного разнообразия существующих в настоящее время контроллеров рассмотрим их
Для классификации огромного разнообразия существующих в настоящее время контроллеров рассмотрим их
По расположению модулей ввода-вывода ПЛК бывают:
- моноблочными, в которых устройство ввода-вывода
По расположению модулей ввода-вывода ПЛК бывают:
- моноблочными, в которых устройство ввода-вывода
Часто перечисленные конструктивные типы контроллеров комбинируются, например моноблочный контроллер может иметь
Часто перечисленные конструктивные типы контроллеров комбинируются, например моноблочный контроллер может иметь
По области применения контроллеры делятся на следующие типы:
- универсальные общепромышленные;
- для
По области применения контроллеры делятся на следующие типы:
- универсальные общепромышленные;
- для
По способу программирования контроллеры бывают:
- программируемые с лицевой панели контроллера;
- программируемые
По способу программирования контроллеры бывают:
- программируемые с лицевой панели контроллера;
- программируемые
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать
Типичный ПЛК представляет собой блок, имеющий определенный набор выходов и
Типичный ПЛК представляет собой блок, имеющий определенный набор выходов и
Режимы работы ПЛК.
Разрабатывая системы управления, важной характеристикой, которую должен учитывать конструктор,
Режимы работы ПЛК.
Разрабатывая системы управления, важной характеристикой, которую должен учитывать конструктор,
Для ПЛК существенное значение имеет не только быстродействие самой системы, но
Для ПЛК существенное значение имеет не только быстродействие самой системы, но
Специфика применения ПЛК обусловливает необходимость одновременного решения нескольких задач. Прикладная программа
Специфика применения ПЛК обусловливает необходимость одновременного решения нескольких задач. Прикладная программа
В некоторых случаях ограничением служит не время реакции на событие, а
В некоторых случаях ограничением служит не время реакции на событие, а
Интеграция ПЛК в систему управления предприятием.
Контроллеры традиционно работают в нижнем звене
Интеграция ПЛК в систему управления предприятием.
Контроллеры традиционно работают в нижнем звене
Далеко не всегда удается создать полностью автоматическую систему. Часто общее руководство
Далеко не всегда удается создать полностью автоматическую систему. Часто общее руководство
Создание систем диспетчерского управления является отдельным видом бизнеса. Разделение производства ПЛК,
Создание систем диспетчерского управления является отдельным видом бизнеса. Разделение производства ПЛК,
Все это «многоэтажное» объяснение призвано подчеркнуть еще одно немаловажное преимущество ПЛК
Все это «многоэтажное» объяснение призвано подчеркнуть еще одно немаловажное преимущество ПЛК
Лекция 9
Стандарты МЭК.
Языки программирования ПЛК
Лекция 9
Стандарты МЭК.
Языки программирования ПЛК
Стандарт МЭК.
Предпосылки создания.
При производстве совместимой продукции (подчиненной требованиям открытого стандарта) фирма
Стандарт МЭК.
Предпосылки создания.
При производстве совместимой продукции (подчиненной требованиям открытого стандарта) фирма
Создание МЭК.
Международная электротехническая комиссия (МЭК, англ. International Electrotechnical Commission, IEC)— международная
Создание МЭК.
Международная электротехническая комиссия (МЭК, англ. International Electrotechnical Commission, IEC)— международная
В 1979 году в рамках Международной Электротехнической Комиссии (МЭК) была создана
В 1979 году в рамках Международной Электротехнической Комиссии (МЭК) была создана
Простота программирования.
Инженер, спроектировавший машину, должен иметь возможность самостоятельно написать программу управления.
Простота программирования.
Инженер, спроектировавший машину, должен иметь возможность самостоятельно написать программу управления.
Очень часто технологи описывают процесс примерно так: «слегка перемешать, подогреть и
Очень часто технологи описывают процесс примерно так: «слегка перемешать, подогреть и
Внедрение стандарта дало фундамент для создания единой школы подготовки специалистов. Человек,
Внедрение стандарта дало фундамент для создания единой школы подготовки специалистов. Человек,
Языки МЭК.
Стандарт МЭК 61131-3 устанавливает пять языков программирования ПЛК, три графических
Языки МЭК.
Стандарт МЭК 61131-3 устанавливает пять языков программирования ПЛК, три графических
Язык IL имеет все недостатки, которые присущи другим низкоуровневым языкам программирования:
Язык IL имеет все недостатки, которые присущи другим низкоуровневым языкам программирования:
Язык ST.
Язык ST (Structured Text, Структурированный Текст) представляет собой язык высокого
Язык ST.
Язык ST (Structured Text, Структурированный Текст) представляет собой язык высокого
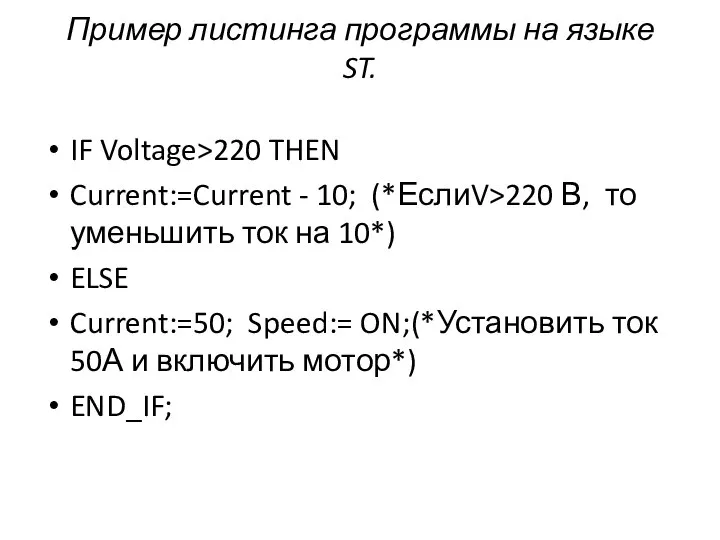
Пример листинга программы на языке ST.
IF Voltage>220 THEN
Current:=Current - 10; (*ЕслиV>220
Пример листинга программы на языке ST.
IF Voltage>220 THEN
Current:=Current - 10; (*ЕслиV>220
ЯзыкLD.
Графический язык релейной логики впервые появился в виде электрических схем, которые
ЯзыкLD.
Графический язык релейной логики впервые появился в виде электрических схем, которые
Пример программы на языке LD (слева) и ее эквивалент в виде
Пример программы на языке LD (слева) и ее эквивалент в виде
Язык FBD.
FBD является графическим языком и наиболее удобен для программирования процессов
Язык FBD.
FBD является графическим языком и наиболее удобен для программирования процессов
Типичным применением языка FBD является описание "жесткой логики" и замкнутых контуров
Типичным применением языка FBD является описание "жесткой логики" и замкнутых контуров
Пример программы на языке FBD.
Пример программы на языке FBD.
Язык SFC.
SFC называют языком программирования, хотя по сути это не язык,
Язык SFC.
SFC называют языком программирования, хотя по сути это не язык,
Язык SFC предназначен для описания системы управления на самом верхнем уровне
Язык SFC предназначен для описания системы управления на самом верхнем уровне
На рис. 2.3 показан фрагмент программы на языке SFC. Программа состоит
На рис. 2.3 показан фрагмент программы на языке SFC. Программа состоит

Пример программы на языке SFC.
Пример программы на языке SFC.
Программное обеспечение для программирования ПЛК.
Существует множество комплексов для разработки программного обеспечения.
Программное обеспечение для программирования ПЛК.
Существует множество комплексов для разработки программного обеспечения.
В CODESYS для программирования доступны все пять определяемых стандартом МЭК 61131-3
В CODESYS для программирования доступны все пять определяемых стандартом МЭК 61131-3
Генератор импульсов.
Генератор импульсов.
В CODESYS реализован ряд других расширений спецификации стандарта IEC 61131-3. Самым
В CODESYS реализован ряд других расширений спецификации стандарта IEC 61131-3. Самым
CODESYS версии V3 построен на базе так называемой платформы автоматизации: CODESYS
CODESYS версии V3 построен на базе так называемой платформы автоматизации: CODESYS
Инструмент CODESYS ApplicationComposer позволяет перейти от программирования практических приложений к их
Инструмент CODESYS ApplicationComposer позволяет перейти от программирования практических приложений к их
TwinCAT.
Пакет программного обеспечения Beckhoff TwinCAT превращает любой совместимый ПК в мульти
TwinCAT.
Пакет программного обеспечения Beckhoff TwinCAT превращает любой совместимый ПК в мульти
TwinCAT состоит из run-time системы управления в режиме реального времени, среды
TwinCAT состоит из run-time системы управления в режиме реального времени, среды
IL (Язык линейных инструкций),
LD (Релейные диаграммы),
FBD/CFC (Функциональные блоковые диаграммы),
SFC (Последовательные функциональные
IL (Язык линейных инструкций),
LD (Релейные диаграммы),
FBD/CFC (Функциональные блоковые диаграммы),
SFC (Последовательные функциональные
Программирование осуществляется:
- локально
- через TCP/IP
- через промышленные шины (BXxxxx и BCxxxx)..
NC
Программирование осуществляется:
- локально
- через TCP/IP
- через промышленные шины (BXxxxx и BCxxxx)..
NC
TwinCAT NC I (интерполяция) - ЧПУ система для линейно-круговой интерполированной траектории
TwinCAT NC I (интерполяция) - ЧПУ система для линейно-круговой интерполированной траектории
 Исследование ассортимента и органолептическая оценка качества муки на примере торговой организации города Севастополя
Исследование ассортимента и органолептическая оценка качества муки на примере торговой организации города Севастополя Страстная седмица. Третий день
Страстная седмица. Третий день Яблоко
Яблоко Строение городской среды, городской ландшафт, социально-функциональные зоны, зоны приватного самочувствия
Строение городской среды, городской ландшафт, социально-функциональные зоны, зоны приватного самочувствия Авиадвигатели МИ-8Т
Авиадвигатели МИ-8Т Совещание с руководителями управляющих организаций и ТСЖ
Совещание с руководителями управляющих организаций и ТСЖ Cемён Эзрович Дуван
Cемён Эзрович Дуван Сашуля Сосаевская
Сашуля Сосаевская rzdYlIirlfpSTxqMq-_zYQ
rzdYlIirlfpSTxqMq-_zYQ Игра викторина По страницам Великой Отечественной войны
Игра викторина По страницам Великой Отечественной войны С ярким юбилеем
С ярким юбилеем Почему Библия действенна сегодня
Почему Библия действенна сегодня Мы рядом с вами. Особенные дети в обычной школе
Мы рядом с вами. Особенные дети в обычной школе Введение в промышленную автоматизацию
Введение в промышленную автоматизацию Драконы
Драконы Закаливание
Закаливание Презентация Microsoft PowerPoint (2) (1)
Презентация Microsoft PowerPoint (2) (1) Производственный процесс и производственная структура промышленных предприятий водного транспорта. Лекция 4
Производственный процесс и производственная структура промышленных предприятий водного транспорта. Лекция 4 ёж
ёж Винтовые вакуумные насосы компании Elmo Rietschle - серия TWISTER
Винтовые вакуумные насосы компании Elmo Rietschle - серия TWISTER Проект бурения эксплуатационной скважины с оптимизацией размещения и применения бурильных яссов
Проект бурения эксплуатационной скважины с оптимизацией размещения и применения бурильных яссов Английские интенсивы на тематической неделе Шпионские игры супергероев
Английские интенсивы на тематической неделе Шпионские игры супергероев Сравнительный анализ личности, индивидуальности, индивидуума и т.д
Сравнительный анализ личности, индивидуальности, индивидуума и т.д Акция
Акция Создание регионального консультационного центра, обеспечивающего оказание информационно-методической поддержки
Создание регионального консультационного центра, обеспечивающего оказание информационно-методической поддержки Пленер 2020 Мой любимый район
Пленер 2020 Мой любимый район Максим Ларионов
Максим Ларионов Годовой отчет. Контроль водохозяйственной деятельности юридических лиц
Годовой отчет. Контроль водохозяйственной деятельности юридических лиц