- Радиомаячные системы посадки сантиметрового диапазона волн (РМСП СМВ (MLS)

Содержание
- 2. Общая характеристика РМСП СМВ (MLS) – это радиомаячная система захода на посадку сантиметрового диапазона, представляющая собой
- 3. Функции РМСП СМВ - получение на борту ВС и выдачу экипажу и в САУ информации об
- 4. Состав РМСП СМВ Основная комплектация, для II категории: КРМ-1 ГРМ-1 Ретранслятор дальномера Аппаратура КДП В расширенной
- 5. Структурная схема Для определения координат Z и H на борт ВС передаются: Данные о длине ВПП
- 6. Эксплуатационно-технические характеристики измерительных и информационных подсистем
- 7. Диаграммы направленности КРМ и ГРМ
- 8. Принцип работы КРМ и ГРМ КРМ и ГРМ реализуют временной метод измерения угловых координат. t =
- 9. Передаваемая информация В качестве основных данных передается следующая информация: - расстояние от антенны КРМ 1 до
- 11. Скачать презентацию
Общая характеристика
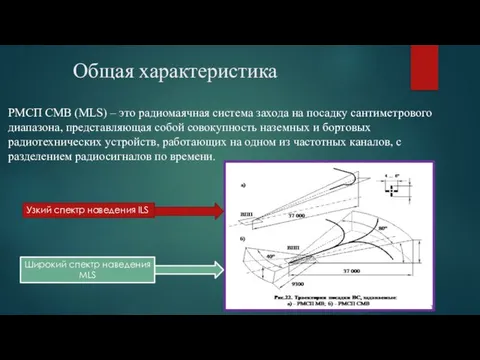
РМСП СМВ (MLS) – это радиомаячная система захода на посадку
Общая характеристика
РМСП СМВ (MLS) – это радиомаячная система захода на посадку
Функции РМСП СМВ
- получение на борту ВС и выдачу экипажу
Функции РМСП СМВ
- получение на борту ВС и выдачу экипажу
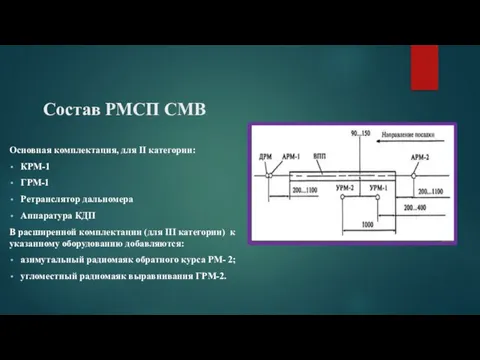
Состав РМСП СМВ
Основная комплектация, для II категории:
КРМ-1
ГРМ-1
Ретранслятор дальномера
Аппаратура КДП
В расширенной
Состав РМСП СМВ
Основная комплектация, для II категории:
КРМ-1
ГРМ-1
Ретранслятор дальномера
Аппаратура КДП
В расширенной
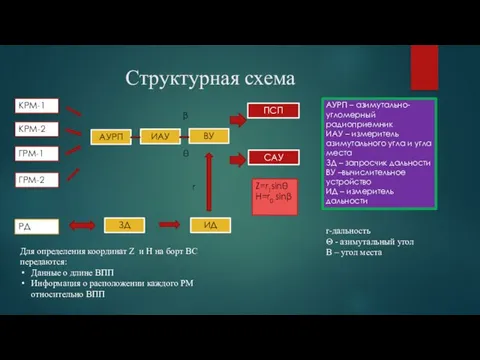
Структурная схема
Для определения координат Z и H на борт ВС передаются:
Данные
Структурная схема
Для определения координат Z и H на борт ВС передаются:
Данные
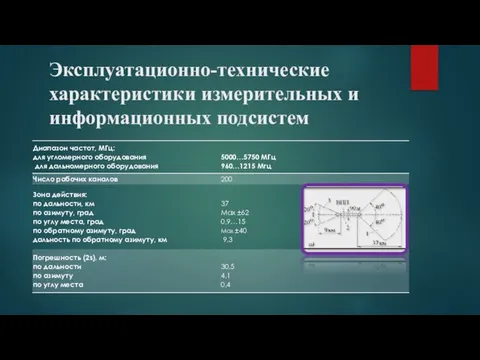
Эксплуатационно-технические характеристики измерительных и информационных подсистем
Эксплуатационно-технические характеристики измерительных и информационных подсистем

Диаграммы направленности КРМ и ГРМ
Диаграммы направленности КРМ и ГРМ
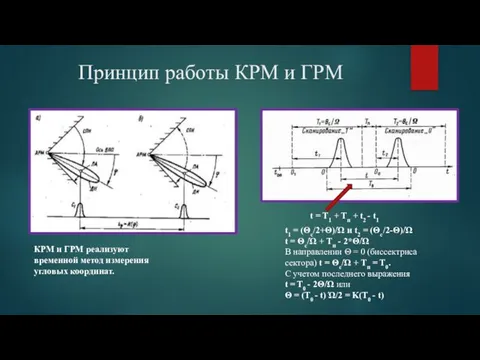
Принцип работы КРМ и ГРМ
КРМ и ГРМ реализуют временной метод
Принцип работы КРМ и ГРМ
КРМ и ГРМ реализуют временной метод

Передаваемая информация
В качестве основных данных передается следующая информация:
- расстояние от антенны КРМ 1
Передаваемая информация
В качестве основных данных передается следующая информация:
- расстояние от антенны КРМ 1
 BLACK_HOLE.1 этап
BLACK_HOLE.1 этап Католицизм
Католицизм Семенюк ИН, Мельникова В. Структура популяций
Семенюк ИН, Мельникова В. Структура популяций Кадастровые работы по формированию земельных участков для малоэтажной многоквартирной жилой застройки
Кадастровые работы по формированию земельных участков для малоэтажной многоквартирной жилой застройки Вышивка в технике Изонить
Вышивка в технике Изонить Кирильчук Микола Миколайович
Кирильчук Микола Миколайович Barbie. History
Barbie. History Классификация средств обработки документов
Классификация средств обработки документов 20161120_korrektsiya_vysshih_psihicheskih_funktsiy_mladshih_shkolnikov_s_ov
20161120_korrektsiya_vysshih_psihicheskih_funktsiy_mladshih_shkolnikov_s_ov Мои интересы в сфере культуры
Мои интересы в сфере культуры 20150320_vovprez
20150320_vovprez Квиз Взрыв мозга
Квиз Взрыв мозга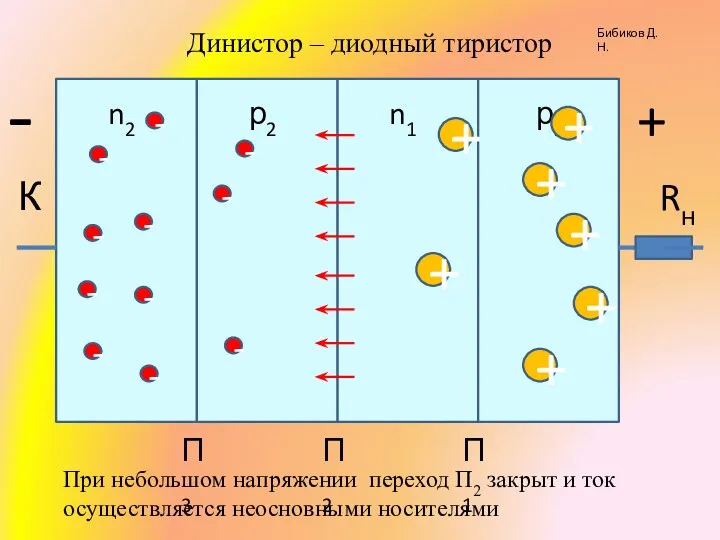 Динистор – диодный тиристор
Динистор – диодный тиристор Лопастной бур
Лопастной бур Reconstruction
Reconstruction Экзегетика Нового завета. Новозаветные апокрифы
Экзегетика Нового завета. Новозаветные апокрифы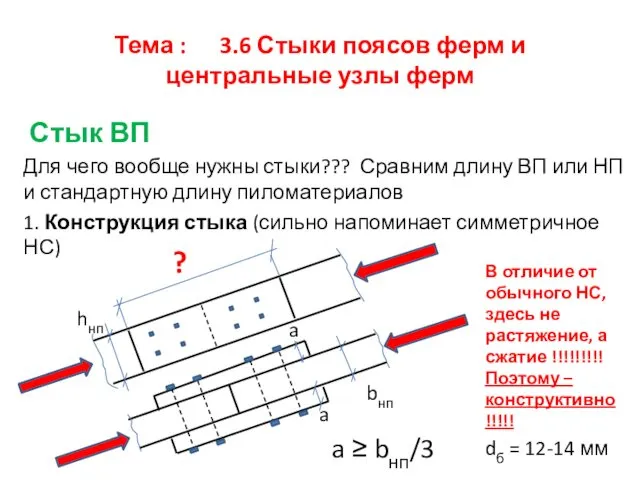 Стыки поясов и центральные узлы ферм
Стыки поясов и центральные узлы ферм years of the Great patriotic war
years of the Great patriotic war Стабилизация вращения БДПТ в 3D-дисплее с электронно-механической разверткой изображения
Стабилизация вращения БДПТ в 3D-дисплее с электронно-механической разверткой изображения Елена Коренская. Архитектор-дизайнер
Елена Коренская. Архитектор-дизайнер 20120203_master-klass
20120203_master-klass Изгиб балки
Изгиб балки Сюжетная композиция
Сюжетная композиция Аргументы в пользу бытия Бога
Аргументы в пользу бытия Бога Состав вещевого мешка
Состав вещевого мешка с днем знаний
с днем знаний Аппликация из сухих листьев
Аппликация из сухих листьев Овощи и фрукты – витаминные продукты
Овощи и фрукты – витаминные продукты