- Робототехника

Содержание
- 2. Робототехника - это (от робот и техника; англ. robotics) прикладная наука, занимающаяся разработкой автоматизированных технических систем.
- 3. Виды робототехники Строительная Промышленная Бытовая Авиационная Экстремальная Военная Космическая Подводная
- 4. С ДРЕВНОСТИ до XVI ВЕКА Середина III тыс. до н. э. Египтяне изобретают идею думающих машин:
- 5. История робототехники Герон из Александрии (I век н.э.) Автоматы Герона
- 6. История робототехники Автоматон «Монах» (1560 г.) Автоматоны — это, фактически, заводные роботы.
- 7. История робототехники Вильгельм Шиккард (1592 – 1635) Механический калькулятор (1623)
- 8. XVII - XVIII ВЕКА В 1617 году Шотландский лорд Джон Непер (John Napier) создает приспособление для
- 9. История робототехники Блез Паскаль (1623 – 1662) Суммирующая машина («паскалина») (1641 – 1642)
- 10. История робототехники Готфрид Вильгельм фон Лейбниц (1646 – 1716) Арифмометр, выполняющий сложение, вычитание, умножение и деление
- 11. История робототехники Механический театр в замке замке Хельбрунн (1750 – 1753)
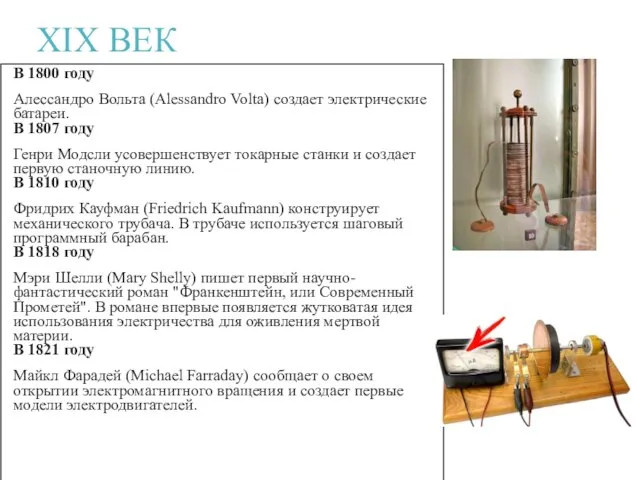
- 12. XIX ВЕК В 1800 году Алессандро Вольта (Alessandro Volta) создает электрические батареи. В 1807 году Генри
- 13. История робототехники Жозеф Мари Жаккард (1752 – 1834) Ткацкий станок Жаккарда с перфокартами (1805)
- 14. История робототехники Чарльз Бэббидж (1791 – 1871) Модель арифметико-логического устройства аналитической машины (1870)
- 15. В основу слова «робототехника» легло слово «робот», придуманное в 1920 г. чешским писателем Карелом Чапеком для
- 16. История робототехники Карел Чапек (1890 – 1938) Пьеса Р.У.Р. – Россумские универсальные роботы (1920)
- 17. Премьерный показ пьесы
- 18. ХХ ВЕК В 1913 году Чарльз Маколи (Charles P. R. Macaulay) конструирует логическую машину для решения
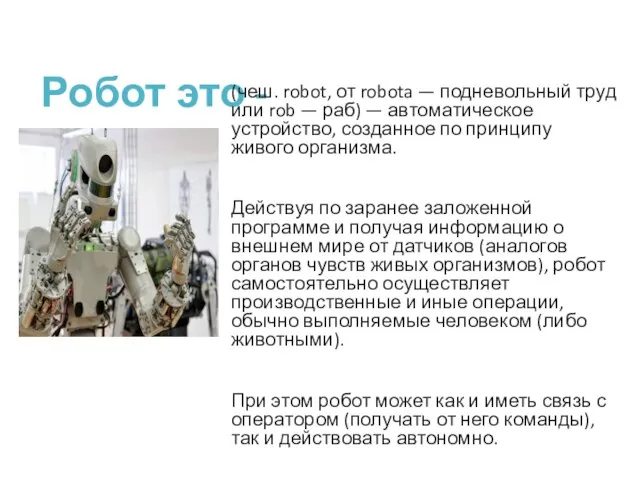
- 19. Робот это - (чеш. robot, от robota — подневольный труд или rob — раб) — автоматическое
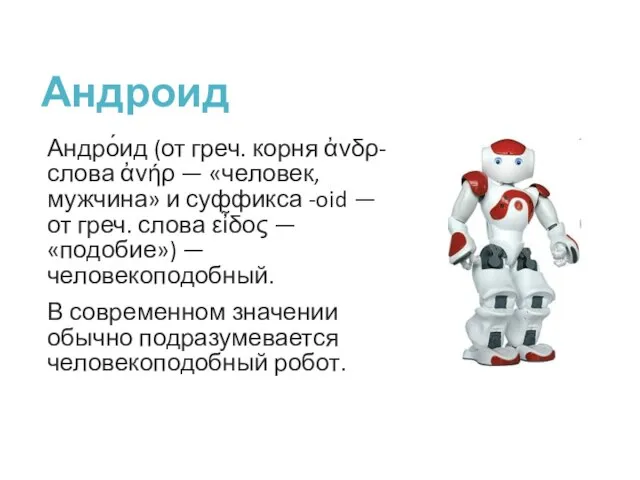
- 20. Андроид Андро́ид (от греч. корня ἀνδρ- слова ἀνήρ — «человек, мужчина» и суффикса -oid — от
- 21. Наши дни Июнь 2000 год Кевин Уорвик (Kevin Warwick) в Орегонском университете создает первого киборга (кибернетический
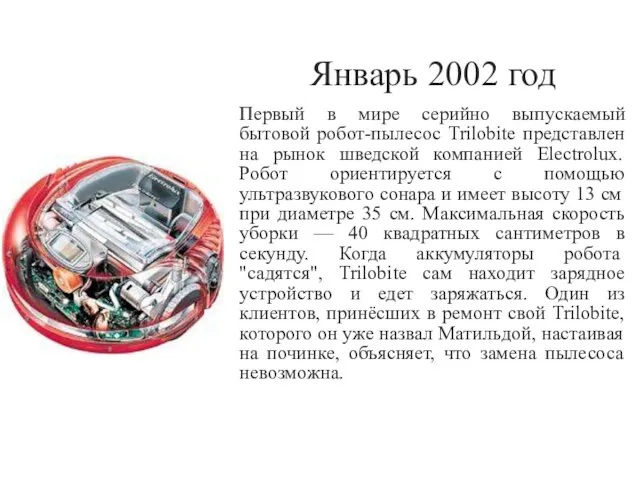
- 22. Январь 2002 год Первый в мире серийно выпускаемый бытовой робот-пылесос Trilobite представлен на рынок шведской компанией
- 23. Сентябрь 2003 год На выставке Sony Dream World 2003 представлен робот QRIO, ранее известный под именем
- 24. Февраль 2004 год Toyota объявила о проекте «Роботы-помощники». Цель компании - создание роботов, обладающих человеческими характеристиками.
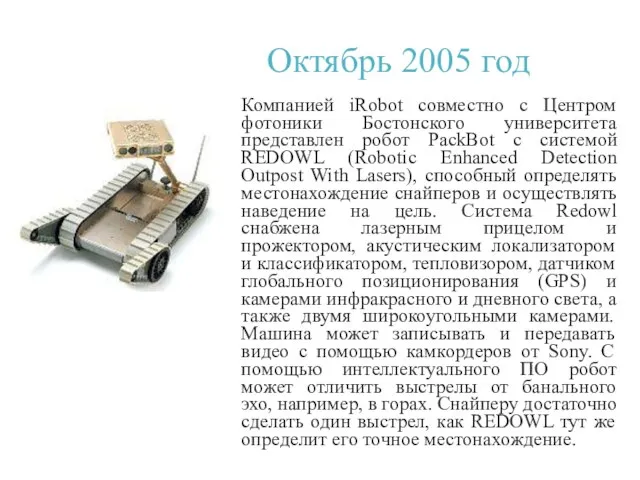
- 25. Октябрь 2005 год Компанией iRobot совместно с Центром фотоники Бостонского университета представлен робот PackBot с системой
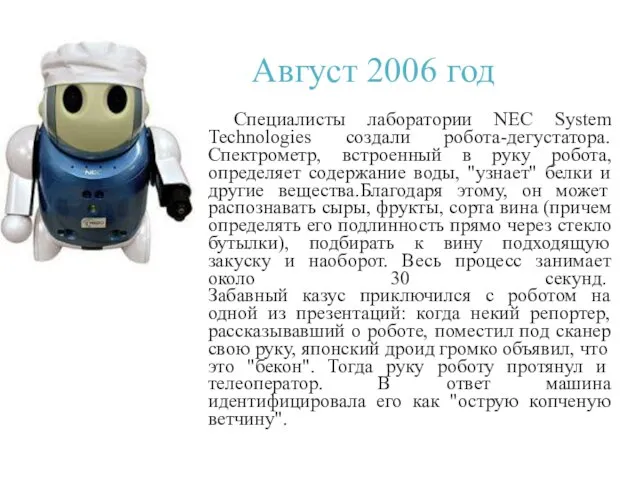
- 26. Август 2006 год Специалисты лаборатории NEC System Technologies создали робота-дегустатора. Спектрометр, встроенный в руку робота, определяет
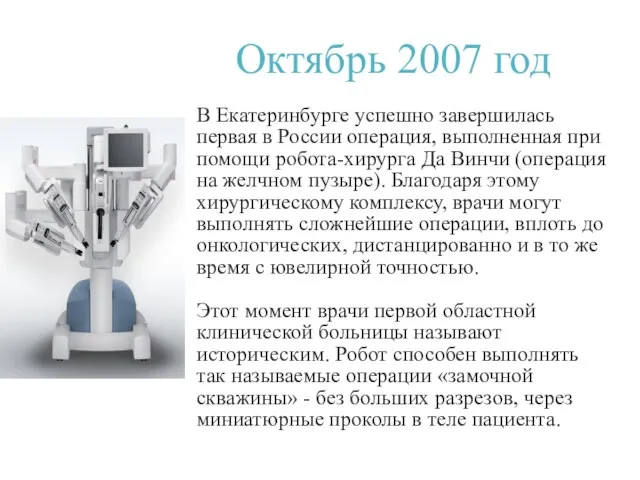
- 27. Октябрь 2007 год В Екатеринбурге успешно завершилась первая в России операция, выполненная при помощи робота-хирурга Да
- 28. Норвежский специалист робототехники Каре Халворсен (Kare Halvorsen aka. Zenta) воплотил в реальность мечты всех любителей фантастики.
- 29. На рисунке 6 представлена общая статистика и тенденция численности роботов в мире. Рисунок 6 – Популяция
- 30. Рисунок 7 – Распределение промышленных роботов по странам за 2004 год.
- 31. Направления робототехники Промышленные роботы. Военные и космические роботы. Бытовые роботы. Андроиды.
- 32. Промышленные роботы
- 33. Военные и космические роботы
- 34. Бытовые роботы
- 35. Андроиды София — человекоподобный робот в виде женщины, разработанный гонконгской компанией Hanson Robotics. Она была спроектирована
- 37. Андройды в играх и фильмах
- 39. Классы роботов: Манипуляционные Автоматическая машина, состоящая из исполнительного устройства в виде манипулятора, имеющего несколько степеней подвижности,
- 40. Манипулятор — это механизм для управления пространственным положением орудий и объектов труда. Манипуляционные роботы поступательное движение
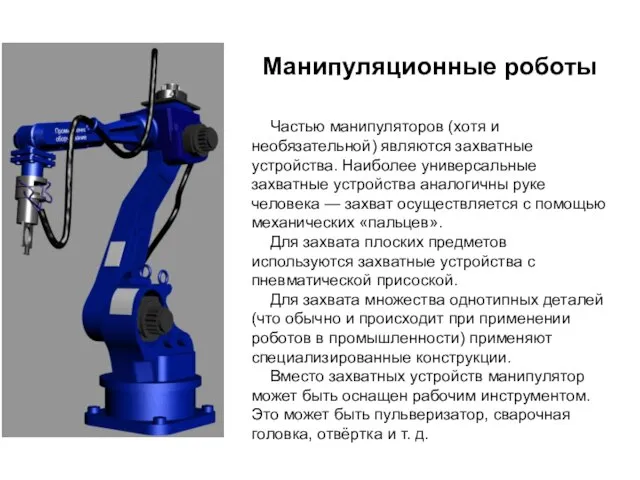
- 41. Манипуляционные роботы Частью манипуляторов (хотя и необязательной) являются захватные устройства. Наиболее универсальные захватные устройства аналогичны руке
- 42. Классы роботов: Мобильные Автоматическая машина, в которой имеется движущееся шасси с автоматически управляемыми приводами. Колесные Шагающие
- 43. Классы роботов: Мобильные Ползающие Плавающие Летающие
- 44. Роботы середины 2000х годов ASIMO Асимо AIBO Айбо NAO (Нао)
- 45. Современные роботы
- 46. Роботы от Boston Dynamics
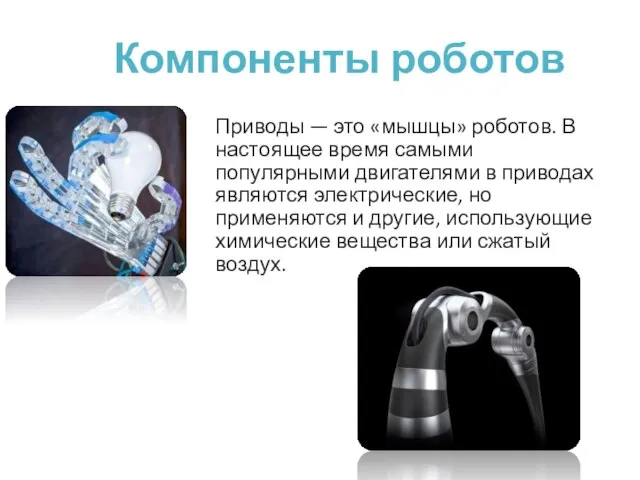
- 47. Компоненты роботов Приводы — это «мышцы» роботов. В настоящее время самыми популярными двигателями в приводах являются
- 48. Приводы
- 49. Законы робототехники Робот не может причинить вред человеку или своим бездействием допустить, чтобы человеку был причинён
- 50. Законы робототехники В 1986 году в романе Роботы и Империя (англ. Robots and Empire) Азимов предложил
- 52. Скачать презентацию
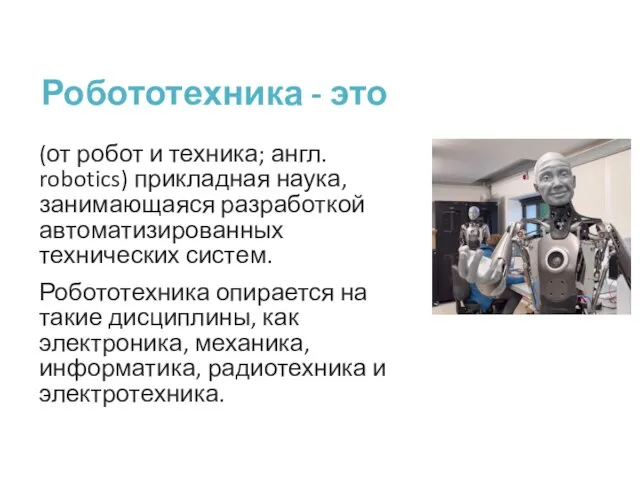
Робототехника - это
(от робот и техника; англ. robotics) прикладная наука, занимающаяся
Робототехника - это
(от робот и техника; англ. robotics) прикладная наука, занимающаяся

Виды робототехники
Строительная
Промышленная
Бытовая
Авиационная
Экстремальная
Военная
Космическая
Подводная
Виды робототехники
Строительная
Промышленная
Бытовая
Авиационная
Экстремальная
Военная
Космическая
Подводная
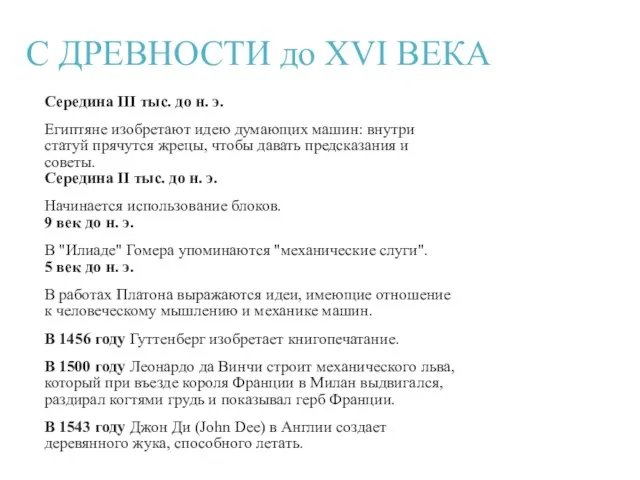
С ДРЕВНОСТИ до XVI ВЕКА
Середина III тыс. до н. э.
Египтяне изобретают
С ДРЕВНОСТИ до XVI ВЕКА
Середина III тыс. до н. э.
Египтяне изобретают
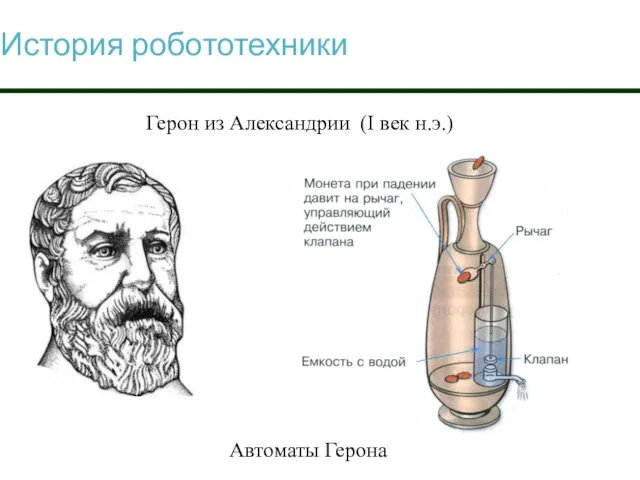
История робототехники
Герон из Александрии (I век н.э.)
Автоматы Герона
История робототехники
Герон из Александрии (I век н.э.)
Автоматы Герона

История робототехники
Автоматон «Монах» (1560 г.)
Автоматоны — это, фактически, заводные роботы.
История робототехники
Автоматон «Монах» (1560 г.)
Автоматоны — это, фактически, заводные роботы.

История робототехники
Вильгельм Шиккард (1592 – 1635)
Механический калькулятор (1623)
История робототехники
Вильгельм Шиккард (1592 – 1635)
Механический калькулятор (1623)
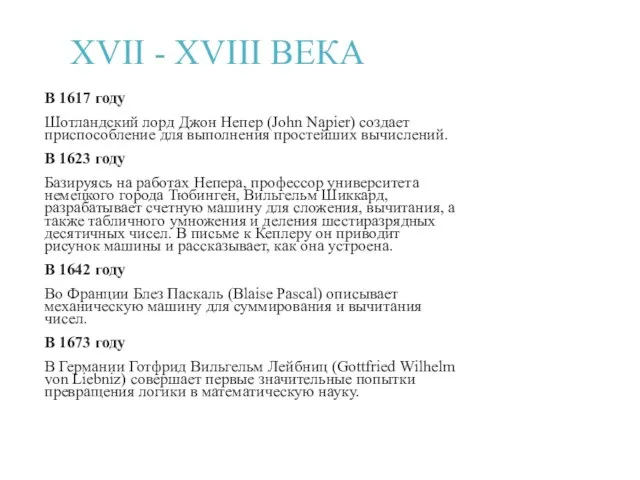
XVII - XVIII ВЕКА
В 1617 году
Шотландский лорд Джон Непер (John Napier)
XVII - XVIII ВЕКА
В 1617 году
Шотландский лорд Джон Непер (John Napier)

История робототехники
Блез Паскаль (1623 – 1662)
Суммирующая машина («паскалина») (1641 – 1642)
История робототехники
Блез Паскаль (1623 – 1662)
Суммирующая машина («паскалина») (1641 – 1642)

История робототехники
Готфрид Вильгельм фон Лейбниц (1646 – 1716)
Арифмометр, выполняющий сложение, вычитание,
История робототехники
Готфрид Вильгельм фон Лейбниц (1646 – 1716)
Арифмометр, выполняющий сложение, вычитание,
История робототехники
Механический театр в замке замке Хельбрунн (1750 – 1753)
История робототехники
Механический театр в замке замке Хельбрунн (1750 – 1753)
XIX ВЕК
В 1800 году
Алессандро Вольта (Alessandro Volta) создает электрические батареи.
В 1807
XIX ВЕК
В 1800 году
Алессандро Вольта (Alessandro Volta) создает электрические батареи.
В 1807

История робототехники
Жозеф Мари Жаккард (1752 – 1834)
Ткацкий станок Жаккарда с перфокартами
История робототехники
Жозеф Мари Жаккард (1752 – 1834)
Ткацкий станок Жаккарда с перфокартами

История робототехники
Чарльз Бэббидж (1791 – 1871)
Модель арифметико-логического устройства аналитической машины (1870)
История робототехники
Чарльз Бэббидж (1791 – 1871)
Модель арифметико-логического устройства аналитической машины (1870)
В основу слова «робототехника» легло слово «робот», придуманное в 1920 г.
В основу слова «робототехника» легло слово «робот», придуманное в 1920 г.

История робототехники
Карел Чапек (1890 – 1938)
Пьеса Р.У.Р. – Россумские универсальные роботы
История робототехники
Карел Чапек (1890 – 1938)
Пьеса Р.У.Р. – Россумские универсальные роботы
Премьерный показ пьесы
Премьерный показ пьесы
ХХ ВЕК
В 1913 году
Чарльз Маколи (Charles P. R. Macaulay) конструирует логическую
ХХ ВЕК
В 1913 году
Чарльз Маколи (Charles P. R. Macaulay) конструирует логическую
Робот это -
(чеш. robot, от robota — подневольный труд или
Робот это -
(чеш. robot, от robota — подневольный труд или
Андроид
Андро́ид (от греч. корня ἀνδρ- слова ἀνήρ — «человек, мужчина»
Андроид
Андро́ид (от греч. корня ἀνδρ- слова ἀνήρ — «человек, мужчина»
Наши дни
Июнь 2000 год
Кевин Уорвик (Kevin Warwick) в Орегонском университете
Наши дни
Июнь 2000 год
Кевин Уорвик (Kevin Warwick) в Орегонском университете
Январь 2002 год
Первый в мире серийно выпускаемый бытовой робот-пылесос Trilobite представлен
Январь 2002 год
Первый в мире серийно выпускаемый бытовой робот-пылесос Trilobite представлен

Сентябрь 2003 год
На выставке Sony Dream World 2003 представлен робот QRIO,
Сентябрь 2003 год
На выставке Sony Dream World 2003 представлен робот QRIO,

Февраль 2004 год
Toyota объявила о проекте «Роботы-помощники». Цель компании - создание
Февраль 2004 год
Toyota объявила о проекте «Роботы-помощники». Цель компании - создание
Октябрь 2005 год
Компанией iRobot совместно с Центром фотоники Бостонского университета представлен
Октябрь 2005 год
Компанией iRobot совместно с Центром фотоники Бостонского университета представлен
Август 2006 год
Специалисты лаборатории NEC System Technologies создали робота-дегустатора. Спектрометр,
Август 2006 год
Специалисты лаборатории NEC System Technologies создали робота-дегустатора. Спектрометр,
Октябрь 2007 год
В Екатеринбурге успешно завершилась первая в России операция, выполненная
Октябрь 2007 год
В Екатеринбурге успешно завершилась первая в России операция, выполненная

Норвежский специалист робототехники Каре Халворсен (Kare Halvorsen aka. Zenta) воплотил в реальность
Норвежский специалист робототехники Каре Халворсен (Kare Halvorsen aka. Zenta) воплотил в реальность
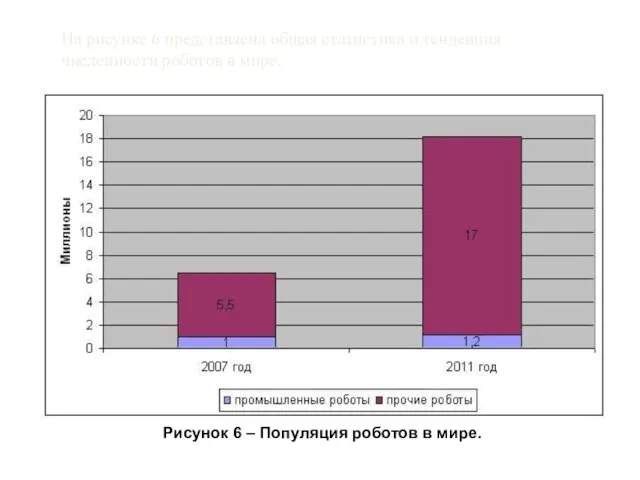
На рисунке 6 представлена общая статистика и тенденция численности роботов в
На рисунке 6 представлена общая статистика и тенденция численности роботов в
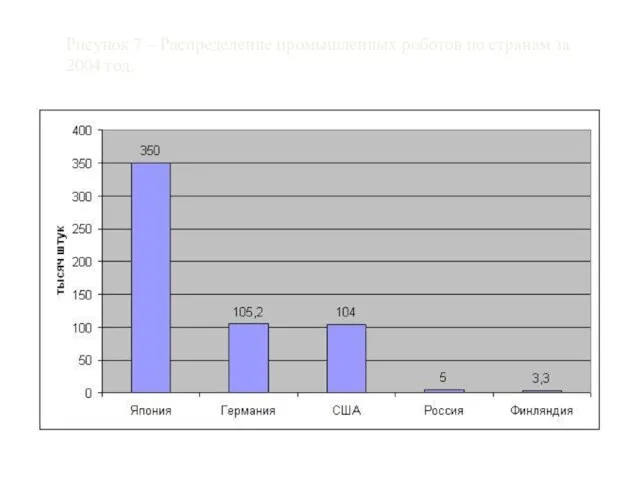
Рисунок 7 – Распределение промышленных роботов по странам за 2004 год.
Рисунок 7 – Распределение промышленных роботов по странам за 2004 год.
Направления робототехники
Промышленные роботы.
Военные и космические роботы.
Бытовые роботы.
Андроиды.
Направления робототехники
Промышленные роботы.
Военные и космические роботы.
Бытовые роботы.
Андроиды.

Промышленные роботы
Промышленные роботы

Военные и космические роботы
Военные и космические роботы

Бытовые роботы
Бытовые роботы

Андроиды
София — человекоподобный робот в виде женщины, разработанный гонконгской компанией Hanson
Андроиды
София — человекоподобный робот в виде женщины, разработанный гонконгской компанией Hanson

Андройды в играх и фильмах
Андройды в играх и фильмах


Классы роботов:
Манипуляционные
Автоматическая машина, состоящая из исполнительного устройства в виде манипулятора, имеющего
Классы роботов:
Манипуляционные
Автоматическая машина, состоящая из исполнительного устройства в виде манипулятора, имеющего

Манипулятор — это механизм для управления пространственным положением орудий и объектов
Манипулятор — это механизм для управления пространственным положением орудий и объектов
Манипуляционные роботы
Частью манипуляторов (хотя и необязательной) являются захватные устройства. Наиболее универсальные
Манипуляционные роботы
Частью манипуляторов (хотя и необязательной) являются захватные устройства. Наиболее универсальные

Классы роботов:
Мобильные
Автоматическая машина, в которой имеется движущееся шасси с автоматически управляемыми
Классы роботов:
Мобильные
Автоматическая машина, в которой имеется движущееся шасси с автоматически управляемыми

Классы роботов:
Мобильные
Ползающие
Плавающие
Летающие
Классы роботов:
Мобильные
Ползающие
Плавающие
Летающие

Роботы середины 2000х годов
ASIMO
Асимо
AIBO
Айбо
NAO (Нао)
Роботы середины 2000х годов
ASIMO
Асимо
AIBO
Айбо
NAO (Нао)

Современные роботы
Современные роботы

Роботы от Boston Dynamics
Роботы от Boston Dynamics
Компоненты роботов
Приводы — это «мышцы» роботов. В настоящее время самыми популярными
Компоненты роботов
Приводы — это «мышцы» роботов. В настоящее время самыми популярными

Приводы
Приводы
Законы робототехники
Робот не может причинить вред человеку или своим бездействием допустить,
Законы робототехники
Робот не может причинить вред человеку или своим бездействием допустить,
Законы робототехники
В 1986 году в романе Роботы и Империя (англ. Robots
Законы робототехники
В 1986 году в романе Роботы и Империя (англ. Robots
 Совершенствование системы управления человеческими ресурсами на предприятии
Совершенствование системы управления человеческими ресурсами на предприятии Оценка и исследование ресурса асинхронного электродвигателя в зависимости от планируемых условий эксплуатации
Оценка и исследование ресурса асинхронного электродвигателя в зависимости от планируемых условий эксплуатации 191203_KT GiGA office 가입신청서_LAN2Cloud포함F
191203_KT GiGA office 가입신청서_LAN2Cloud포함F Моделирование химико-технологических процессов
Моделирование химико-технологических процессов Продукты JB - 2022-07-28 16.39.59
Продукты JB - 2022-07-28 16.39.59 Авторская игрушка
Авторская игрушка Анализ и моделирование процессов самоорганизации для автоматизированного управления нефтегазодобычей
Анализ и моделирование процессов самоорганизации для автоматизированного управления нефтегазодобычей История развития радио
История развития радио Теория и история религии
Теория и история религии Задвижка - пример внутреннего паза
Задвижка - пример внутреннего паза Подготовка исходных данных по скважине к интерпретации
Подготовка исходных данных по скважине к интерпретации Призначення, склад та технічні характеристики телефонних апаратів систем МБ, ЦБ. Класифікація АТС
Призначення, склад та технічні характеристики телефонних апаратів систем МБ, ЦБ. Класифікація АТС Автоматизація процесу керування котлом-утилізатором Universal HRSB
Автоматизація процесу керування котлом-утилізатором Universal HRSB Новые формы работы с обучающимися и перспективные
Новые формы работы с обучающимися и перспективные Яндекс купил сайт Кинопоиск
Яндекс купил сайт Кинопоиск Силовые приводы приспособлений
Силовые приводы приспособлений Знак
Знак Корпус общественных наблюдателей
Корпус общественных наблюдателей Cars’ names
Cars’ names Возврат конденсата с механическими конденсатными насосами. Системы возврата конденсата
Возврат конденсата с механическими конденсатными насосами. Системы возврата конденсата Правила безопасности на летней площадке
Правила безопасности на летней площадке Оборудование для проведения деловых мероприятий
Оборудование для проведения деловых мероприятий 20150812_prezentatsiya_-_1
20150812_prezentatsiya_-_1 Схемы и системы сертификации. Органы по сертификации и испытательные лаборатории
Схемы и системы сертификации. Органы по сертификации и испытательные лаборатории Особенности домашней работы студентов в дистанционном иноязычном образовании
Особенности домашней работы студентов в дистанционном иноязычном образовании птицы на гнёздах гр.№2,8
птицы на гнёздах гр.№2,8 Каменный уголь
Каменный уголь Звуковая сигнализация судов (ВВП)
Звуковая сигнализация судов (ВВП)