- Системы координат и элементы ориентирования снимков

Содержание
- 2. Системы координат, применяемые в фотограмметрии При фотограмметрической обработке снимков используют следующие прямоугольные системы координат: - система
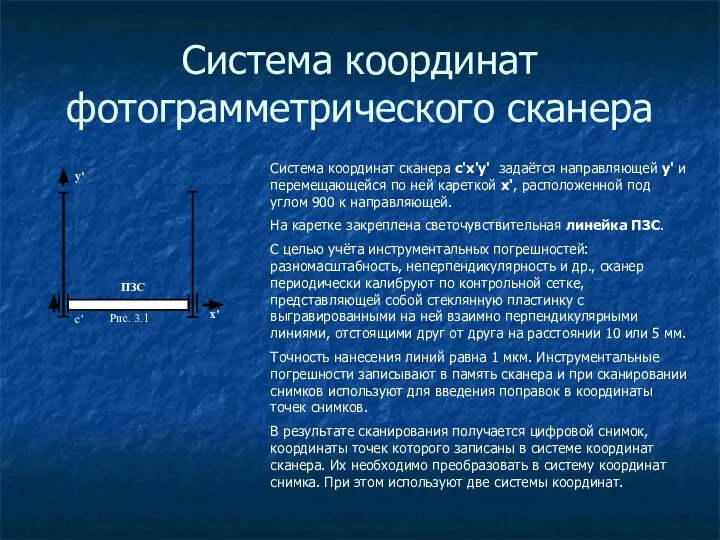
- 3. Система координат фотограмметрического сканера Система координат сканера c'x'y' задаётся направляющей y' и перемещающейся по ней кареткой
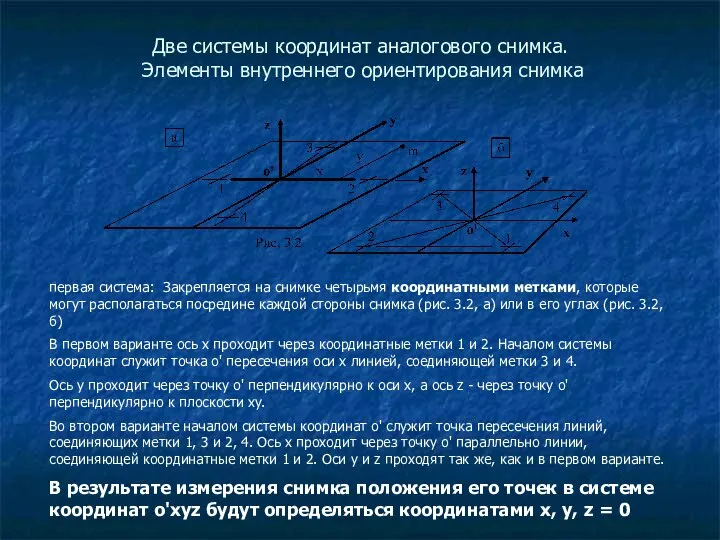
- 4. Две системы координат аналогового снимка. Элементы внутреннего ориентирования снимка первая система: Закрепляется на снимке четырьмя координатными
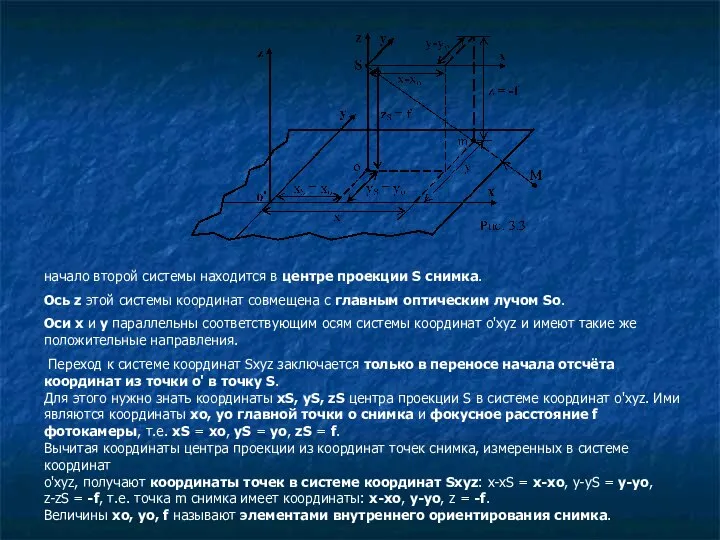
- 5. начало второй системы находится в центре проекции S снимка. Ось z этой системы координат совмещена с
- 6. Определив с их помощью положение центра проекции относительно снимка, можно провести проектирующие лучи через центр проекции
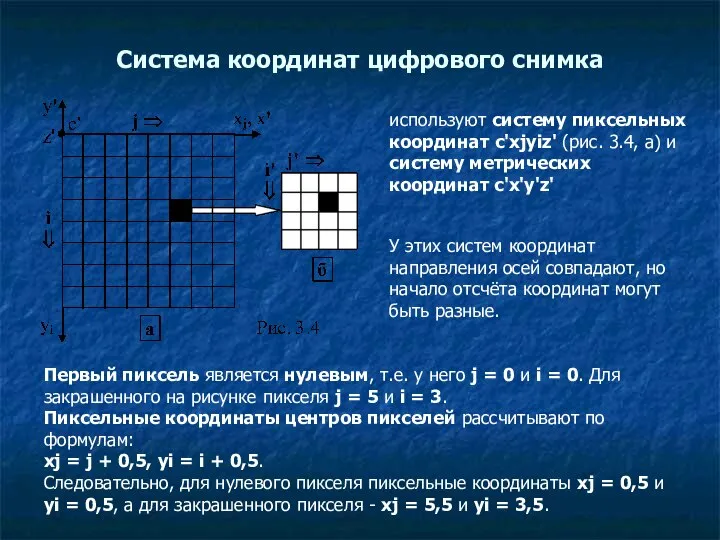
- 7. Система координат цифрового снимка используют систему пиксельных координат c'xjyiz' (рис. 3.4, а) и систему метрических координат
- 8. Для перехода от пиксельных координат к метрическим координатам, которые участвуют в дальнейших преобразованиях, используют формулы: x'
- 9. Если при выводе снимка на экран монитора пиксель снимка будет совмещаться с пикселем монитора, то точность
- 10. В результате измерения цифрового снимка каждая точка в системе метрических координат с'x'y'z' получает координаты x', y',
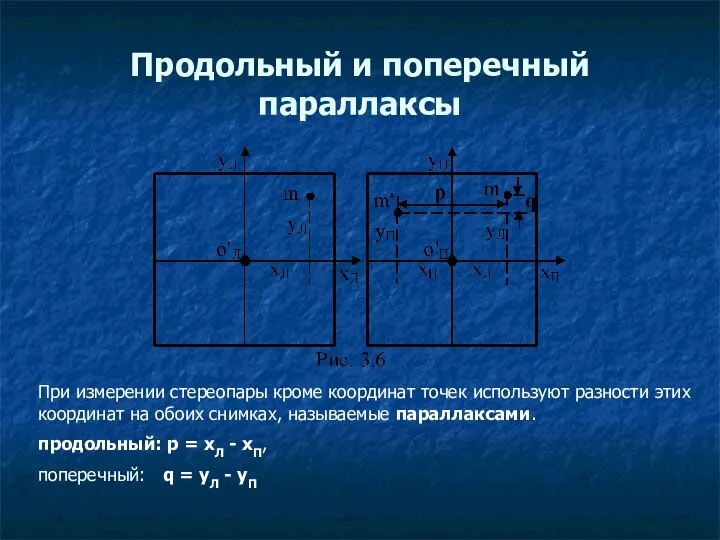
- 11. Продольный и поперечный параллаксы При измерении стереопары кроме координат точек используют разности этих координат на обоих
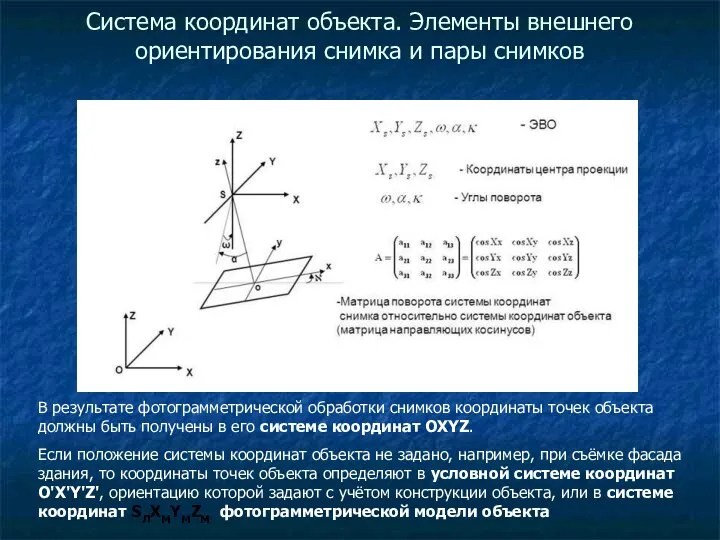
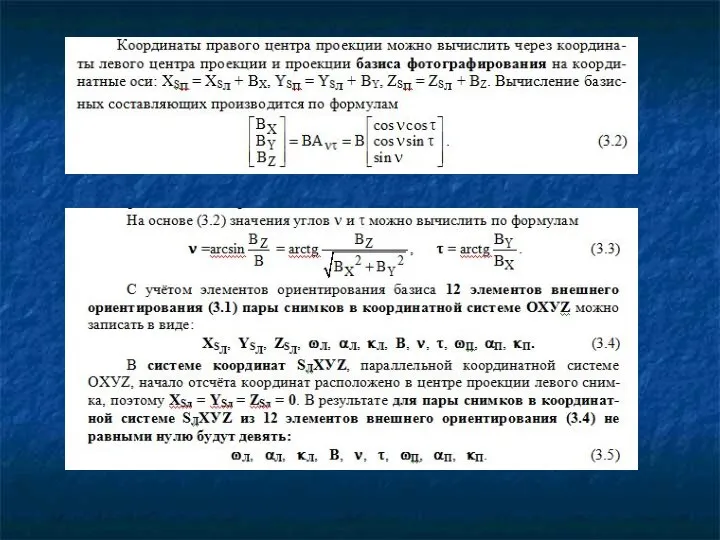
- 12. Система координат объекта. Элементы внешнего ориентирования снимка и пары снимков В результате фотограмметрической обработки снимков координаты
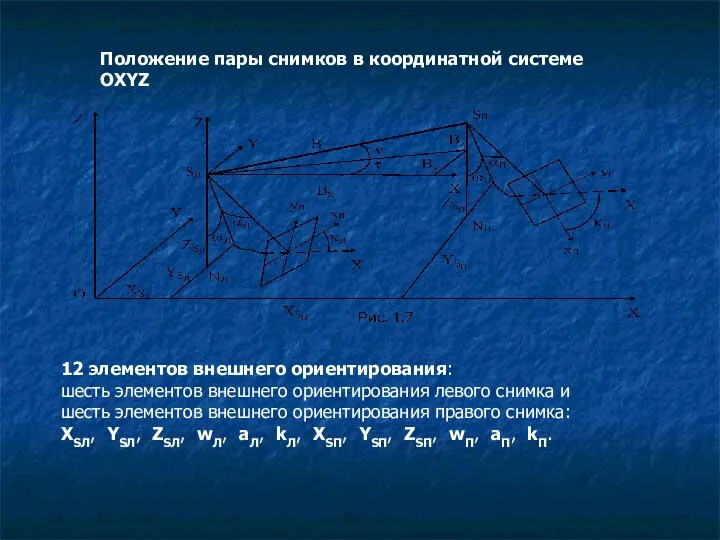
- 13. Положение пары снимков в координатной системе OXYZ 12 элементов внешнего ориентирования: шесть элементов внешнего ориентирования левого
- 15. ПРЕОБРАЗОВАНИЯ СИСТЕМ КООРДИНАТ Технологическая схема преобразования систем координат
- 17. Скачать презентацию
Системы координат, применяемые в фотограмметрии
При фотограмметрической обработке снимков используют следующие прямоугольные
Системы координат, применяемые в фотограмметрии
При фотограмметрической обработке снимков используют следующие прямоугольные
Система координат фотограмметрического сканера
Система координат сканера c'x'y' задаётся направляющей y' и
Система координат фотограмметрического сканера
Система координат сканера c'x'y' задаётся направляющей y' и
Две системы координат аналогового снимка.
Элементы внутреннего ориентирования снимка
первая система: Закрепляется
Две системы координат аналогового снимка.
Элементы внутреннего ориентирования снимка
первая система: Закрепляется
начало второй системы находится в центре проекции S снимка.
Ось z
начало второй системы находится в центре проекции S снимка.
Ось z
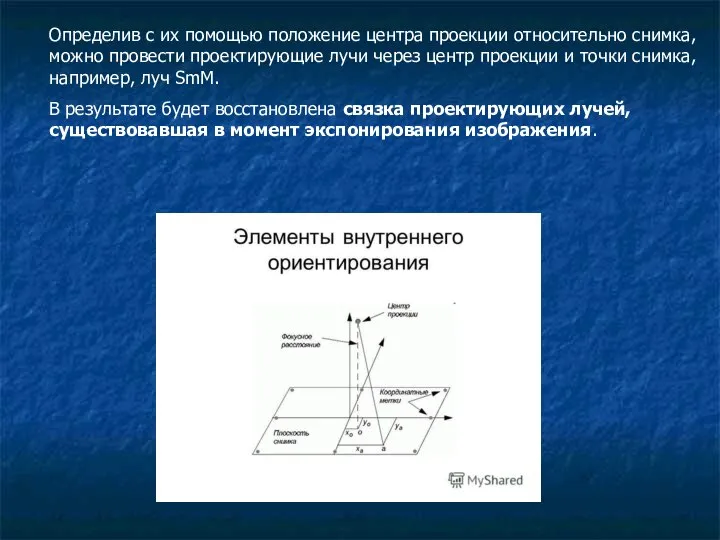
Определив с их помощью положение центра проекции относительно снимка, можно провести
Определив с их помощью положение центра проекции относительно снимка, можно провести
Система координат цифрового снимка
используют систему пиксельных координат c'xjyiz' (рис. 3.4,
Система координат цифрового снимка
используют систему пиксельных координат c'xjyiz' (рис. 3.4,
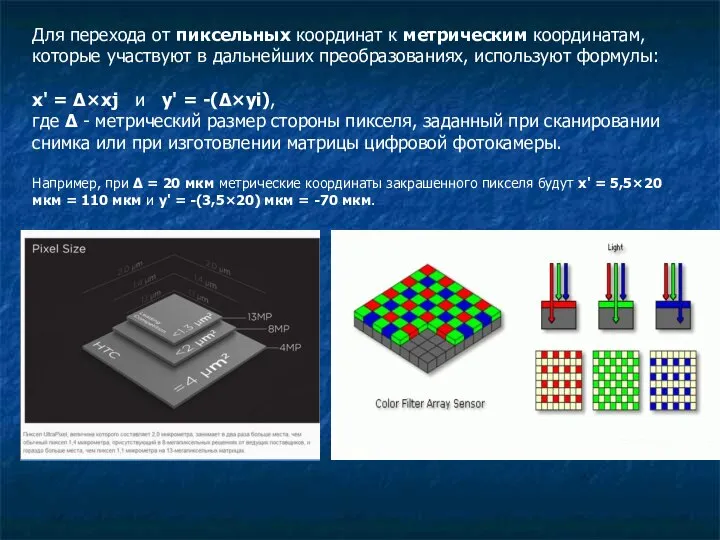
Для перехода от пиксельных координат к метрическим координатам, которые участвуют в
Для перехода от пиксельных координат к метрическим координатам, которые участвуют в
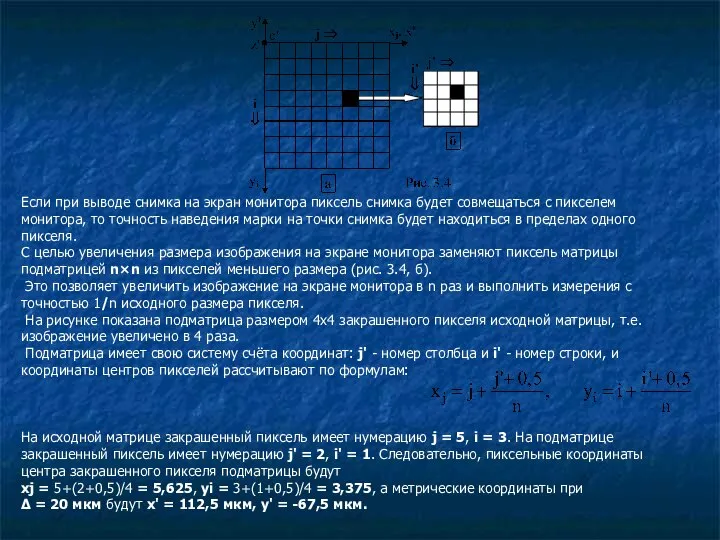
Если при выводе снимка на экран монитора пиксель снимка будет совмещаться
Если при выводе снимка на экран монитора пиксель снимка будет совмещаться
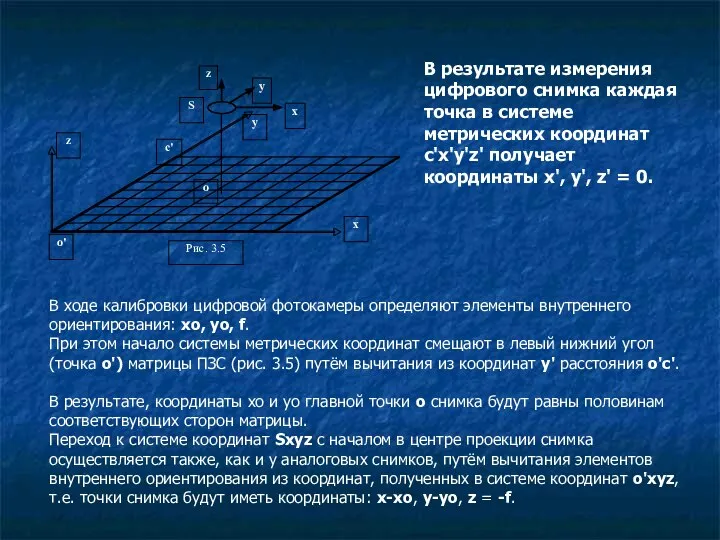
В результате измерения цифрового снимка каждая точка в системе метрических координат
В результате измерения цифрового снимка каждая точка в системе метрических координат
Продольный и поперечный параллаксы
При измерении стереопары кроме координат точек используют разности
Продольный и поперечный параллаксы
При измерении стереопары кроме координат точек используют разности
Система координат объекта. Элементы внешнего
ориентирования снимка и пары снимков
В результате фотограмметрической
Система координат объекта. Элементы внешнего
ориентирования снимка и пары снимков
В результате фотограмметрической
Положение пары снимков в координатной системе OXYZ
12 элементов внешнего ориентирования:
Положение пары снимков в координатной системе OXYZ
12 элементов внешнего ориентирования:
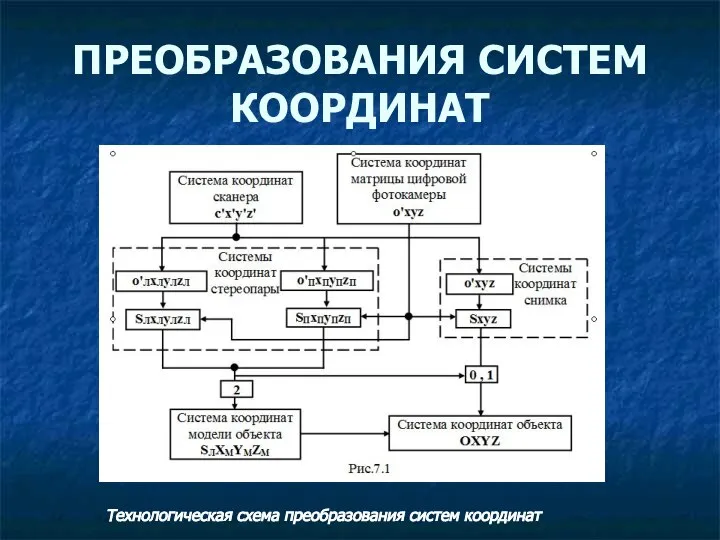
ПРЕОБРАЗОВАНИЯ СИСТЕМ КООРДИНАТ
Технологическая схема преобразования систем координат
ПРЕОБРАЗОВАНИЯ СИСТЕМ КООРДИНАТ
Технологическая схема преобразования систем координат
 Розрахунок електричної мережі 110 кВ і 3-х підстанцій
Розрахунок електричної мережі 110 кВ і 3-х підстанцій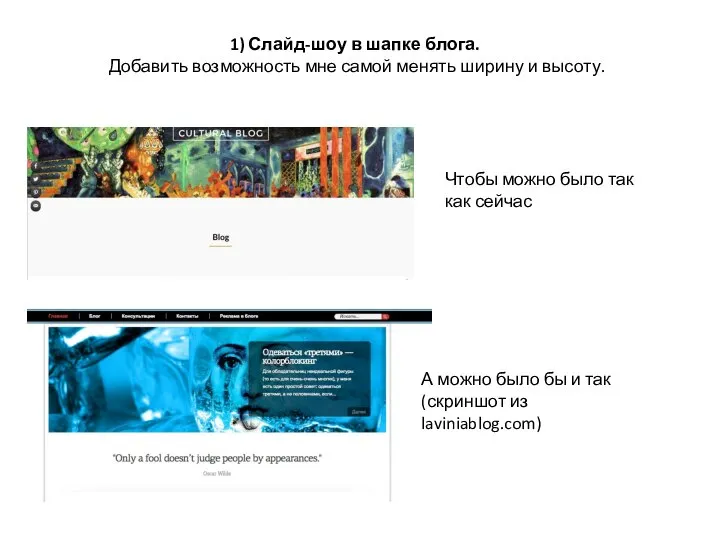 Улучшения сайта personalcultures
Улучшения сайта personalcultures Методы и средства измерений, принципиальные схемы электроизмерительных приборов
Методы и средства измерений, принципиальные схемы электроизмерительных приборов Вспомогательное оборудование и аппаратура ТИГ. Способы зажигания дуги
Вспомогательное оборудование и аппаратура ТИГ. Способы зажигания дуги Приемочные испытания автономной блочно-комплектной энергетической установки БКЭУ-ВСМ
Приемочные испытания автономной блочно-комплектной энергетической установки БКЭУ-ВСМ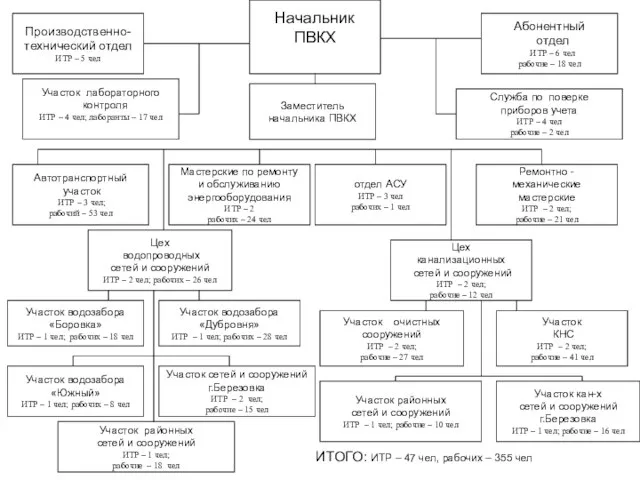 структура ПВК
структура ПВК В ресторане
В ресторане Детская общественная организация Магистраль
Детская общественная организация Магистраль Сү көлігі
Сү көлігі чтобы путь был счастливым
чтобы путь был счастливым 45646
45646 Образ жизни и индивидуальное проектирование. Мой дом – мой образ жизни (тема 1)
Образ жизни и индивидуальное проектирование. Мой дом – мой образ жизни (тема 1) Цымбал Максим. Фотоальбом
Цымбал Максим. Фотоальбом Мы с тобой встретили друг друга
Мы с тобой встретили друг друга Иногда мечты сбываются
Иногда мечты сбываются Разработка стенда для динамических испытаний
Разработка стенда для динамических испытаний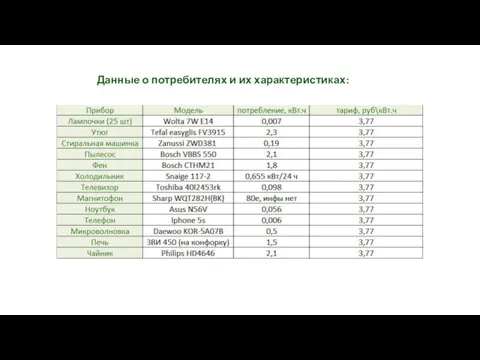 Данные о потребителях и их характеристиках
Данные о потребителях и их характеристиках Аннинские загадки
Аннинские загадки Природа и музыка. Прогулка
Природа и музыка. Прогулка kontrolnaya_osnovy_zhurnalistiki (1)
kontrolnaya_osnovy_zhurnalistiki (1) Отряд Юных Инспекторов Движения (ЮИД)
Отряд Юных Инспекторов Движения (ЮИД) The shades and ceiling lamps are made from natural materials
The shades and ceiling lamps are made from natural materials Самолет на радиоуправлении
Самолет на радиоуправлении Пример проведения функционально-стоимостного анализа изделия
Пример проведения функционально-стоимостного анализа изделия Информационные технологии. Основы структурного построения персонального компьютера
Информационные технологии. Основы структурного построения персонального компьютера Сушильное оборудование
Сушильное оборудование Cмазочные материалы РЕМСО
Cмазочные материалы РЕМСО Ручные работы
Ручные работы